机械原理(双语)试卷2
《机械原理》试题及答案
试题 13、 转动副的自锁条件是 驱动力臂≤摩擦圆半径 。
一、选择题(每空 2 分,共 10 分)4、 斜齿轮传动与直齿轮传动比较的主要优点: 啮合性能好,重合度大,结构紧凑 。
1、平面机构中,从动件的运动规律取决于D。
A 、从动件的尺寸B 、 机构组成情况C 、 原动件运动规律D 、 原动件运动规律和机构的组成情况2、一铰链四杆机构各杆长度分别为30mm ,60mm ,80mm ,100mm ,当以 30mm 5、 在周转轮系中,根据其自由度的数目进行分类:若其自由度为 2,则称为 差动轮系 ,若其自由度为 1,则称其为 行星轮系 。
6、 装有行星轮的构件称为 行星架(转臂或系杆) 。
7、 棘轮机构的典型结构中的组成有: 摇杆 、 棘爪 、 棘轮 等。
三、简答题(15 分)1、 什么是构件?的杆为机架时,则该机构为A 机构。
答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的A 、双摇杆B 、 双曲柄C 、曲柄摇杆单位体。
2、 何谓四杆机构的“死点”?答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从 D 、 不能构成四杆机构动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动,3、凸轮机构中,当推杆运动规律采用C时,既无柔性冲击也无刚性冲击。
A 、一次多项式运动规律B 、 二次多项式运动规律C 、正弦加速运动规律D 、 余弦加速运动规律4、平面机构的平衡问题中,对“动不平衡”描述正确的是B 。
A 、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B 、 动不平衡只有在转子运转的情况下才能表现出来机构的这种传动角为零的位置称为死点。
3、 用范成法制造渐开线齿轮时,出现根切的根本原因是什么?避免根切的方法有哪些?答:出现根切现象的原因:刀具的顶线(不计入齿顶比普通齿条高出的一段c*m )超过 了被切齿轮的啮合极限点 N 1,则刀具将把被切齿轮齿根一部分齿廓切去。
机械原理考试试题及答案3篇(K12教育文档)
机械原理考试试题及答案3篇(word版可编辑修改)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(机械原理考试试题及答案3篇(word版可编辑修改))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为机械原理考试试题及答案3篇(word版可编辑修改)的全部内容。
试题1一、选择题(每空2分,共10分)1、平面机构中,从动件的运动规律取决于 D .A、从动件的尺寸B、机构组成情况C、原动件运动规律D、原动件运动规律和机构的组成情况2、一铰链四杆机构各杆长度分别为30mm ,60mm,80mm,100mm,当以30mm的杆为机架时,则该机构为 A 机构。
A、双摇杆B、双曲柄C、曲柄摇杆D、不能构成四杆机构3、凸轮机构中,当推杆运动规律采用 C 时,既无柔性冲击也无刚性冲击。
A、一次多项式运动规律B、二次多项式运动规律C、正弦加速运动规律D、余弦加速运动规律4、平面机构的平衡问题中,对“动不平衡”描述正确的是 B 。
A、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B、动不平衡只有在转子运转的情况下才能表现出来C、静不平衡针对轴尺寸较小的转子(转子轴向宽度b与其直径D之比b/D〈0.2)D、使动不平衡转子的质心与回转轴心重合可实现平衡5、渐开线齿轮齿廓形状决定于 D 。
A、模数B、分度圆上压力角C、齿数D、前3项二、填空题(每空2分,共20分)1、两构件通过面接触而构成的运动副称为低副。
2、作相对运动的三个构件的三个瞬心必在同一条直线上。
3、转动副的自锁条件是驱动力臂≤摩擦圆半径。
4、斜齿轮传动与直齿轮传动比较的主要优点:啮合性能好,重合度大,结构紧凑。
机械原理试卷

一、单项选择题1、下列实物:1)台虎钳,2)百分表,3)水泵,4)台钻,5)牛头刨床工作台升降装置,其中哪几种是机构?( b )A、1)、2)和3)B、1)、2)和5)C、1)、2)、3)和4)D、3)、4)和5)2、四根杆长度相等的双曲柄机构,若主动曲柄作连续匀速转动,则从动曲柄将作( a )。
A、匀速转动B、间歇转动C、周期变速转动D、往复摆动3、凸轮机构从动件推程采用等速运动规律时,刚性冲击将发生在( d )。
A、推程的起始点B、推程的中点C、推程的终点D、推程的始点和终点4、与棘轮机构相比较,槽轮机构适用于( c )的场合。
A、转速较高,转角较小B、转速较低,转角较小C、转速较高,转角较大D、转速较低,转角较大5、有一对心曲柄滑块机构,曲柄长为50mm,则滑块的行程为( b )。
A、200mmB、100mmC、50mmD、400mm6、四根杆长度不相等的双曲柄机构,若主动曲柄作连续匀速转动,则从动曲柄将作( a )。
A、匀速转动B、间歇转动C、周期变速转动D、往复摆动7、凸轮机构从动件推程采用等速运动规律时,在运动始末将发生( a )。
A、刚性冲击B、柔性冲击C、无冲击D、先刚后柔8、有一对心曲柄滑块机构,曲柄长为200mm,则滑块的行程为( d )。
A、200mmB、100mmC、50mmD、400mm9、机器与机构的主要区别是什么?( c )A、机器的运动较复杂B、机器的结构较复杂C、机器能完成有用的机械功或转化机械能D、机器能变换运动形式10、自行车后轴上常称之为“飞轮”的,实际上是( b )机构。
A、凸轮式间隙机构B、棘轮机构C、不完全齿轮机构D、槽轮机构二、填空题1、机械原理的英文翻译是theory of machines and mechanisms。
2、在平面机构中若引入两个高副将引入2 个约束,而引入两个低副将引入4个约束。
3、三个彼此作平面平行运动的构件共有 3 个速度瞬心,这几个瞬心心必定位于一条直线上,含有6个活动构件的平面机构共有有21 个速度瞬心。
机械原理考试题及答案

机械原理考试题及答案一、选择题。
1. 以下哪个不是机械原理的基本原理?A. 杠杆原理。
B. 力的平衡原理。
C. 力的合成分解原理。
D. 动量守恒原理。
答案,D。
2. 当两个力使物体保持静止或匀速直线运动时,这两个力的合力为零,这是根据什么原理?A. 杠杆原理。
B. 力的平衡原理。
C. 力的合成分解原理。
D. 动量守恒原理。
答案,B。
3. 一个物体在水平面上匀速运动,这是根据哪个原理?A. 杠杆原理。
B. 力的平衡原理。
C. 力的合成分解原理。
D. 动量守恒原理。
答案,C。
4. 一个物体在水平面上匀速运动,如果施加一个水平方向的力,速度将会改变,这是根据哪个原理?A. 杠杆原理。
B. 力的平衡原理。
C. 力的合成分解原理。
D. 动量守恒原理。
答案,D。
5. 下列哪个原理可以用来解释杠杆的工作原理?A. 杠杆原理。
B. 力的平衡原理。
C. 力的合成分解原理。
D. 动量守恒原理。
答案,A。
二、填空题。
1. 力的平衡原理可以表示为∑F=0,其中∑F代表合力的()。
答案,矢量和。
2. 力的合成分解原理可以表示为F=F1+F2,其中F代表合力,F1和F2分别代表()。
答案,分力。
3. 动量守恒原理可以表示为m1v1+m2v2=m1v1'+m2v2',其中m1v1和m2v2分别代表两个物体的()。
答案,动量。
三、简答题。
1. 请简要解释杠杆原理及其应用。
答,杠杆原理是指在固定支点附近,利用杠杆的力臂和力的作用点之间的关系,通过施加力来产生力矩,从而实现对物体的移动或者举起。
杠杆原理的应用非常广泛,比如门锁、剪刀、螺丝刀等工具都是利用了杠杆原理。
2. 举例说明力的合成分解原理在实际生活中的应用。
答,力的合成分解原理是指一个力可以分解为两个或多个力的合力,这在实际生活中有很多应用。
比如在拖拉机上,拖拉机的牵引力可以分解为水平方向和垂直方向的两个力,这样可以更好地理解和应用牵引力的作用。
四、综合题。
机原习题集(双语0)

2-1Please draw the kinematic diagrams of the mechanisms shown below。
(a)(b)(c)2-2 Please calculate the DOF of mechanisms as follows, can you point out these mechanisms have a determined motion or not ? (The link with arrow is driving link)(d )(c )3-1 Please confirm the location of the instant centres of mechanisms as follows(Using the signP)。
ij4-1According to the link dimension ,determine the type of four-bar linkage holding different link as frame?4-2 In a revolute four-bar linkage ABCD shown as below b=100mm c=80mm d=110mm(1)Find the range of the values for the length L AB of link AB if the linkage is either (a) crank-rocker mechanism with crank AB ,or(b) a double-rocker mechanism.(2) Can the linkage be a double-crank mechanism by choosing L AB suitably?Why?4-3 In the double-crank linkage ABCD shown as below L AB=80mm L BC=180mm L CD=230mm L AD=200 The driver BC rotates at a constant speed. Find the minimum transmission angleof the linkagemin4-4 In the revolute four-bar linkage ABCD Let link AD is the frame L AB=60mm L BC=130mm L CD=140mm L AD=200mm and 0BAD∠=135(1)Determine the type of the revolute four-barmechanism(2) If the side link AB is a driver and rotates at aconstant speed(a)find the pressure angle αand transmission angle γof the mechanism at that position(b) Find the angularϕstroke of the link CDmax(c) Find the crank acute angleθbetween the twolimiting positions(d) Calculate the time ratio K(e) Will any dead-point occur during the whole cycle ofthe motion?(f) Find the maximum pressure angleαand themax minimum transmission angleγmin4-5 Design the revolute four-bar linkage ABCD according to the figure as below:Let the length of rocker L CD =75mm , L AD=100mm and Link AD is the frame , the time ratio K=1.5 , The angle between one limiting position of rocker and the frame 045∠=CDACalculate the length of L AB、L BC(has two results)4-6 Design the offset slider-crank mechanism ABC according to the figure as below: The crank AB is the driver, Let the length of crank L AB =25mm, The offset e=10mm, The maximum pressure angle 0max 30α= Find the stroke H of the slider and the crank acute angleθ between the two limiting positions.4-7 图所示为一牛头刨床的主传动机构,已知mm l AB 75=,mm l D E 100= ,行程速比系数K=2,刨头5的行程H=300mm ,要求在整个行程中,推动刨头5有较小的压力角,试设计此机构。
机械原理考试试题及答案详解(2)
机械原理模拟试卷一、填空题(共20 分,每题 2 分)1. 若忽略摩擦,一对渐开线齿廓啮合时,齿廓间作用力沿着方向。
(① 齿廓公切线② 节圆公切线③ 中心线④ 基圆内公切线)2. 具有相同理论廓线,只有滚子半径不同的两个对心直动滚子从动件盘形凸轮机构,其从动件的运动规律,凸轮的实际廓线。
(① 相同② 不同③ 不一定)3. 刚性转子动平衡的力学条件是。
(① 惯性力系的主矢为零② 惯性力系的主矩为零③ 惯性力系的主矢、主矩均为零)4. 机械在周期变速稳定运转阶段,一个循环内的驱动功W d 阻抗功W r(① 大于② 等于③ 小于④ 不一定)5. 从机械效率的观点看,机构发生自锁是由于。
(① 驱动力太小② 生产阻力太大③ 效率小于零④ 摩擦力太大)6. 差动轮系是指自由度。
(① 为2的周转轮系② 为2的定轴轮系③ 为1的周转轮系)7. 渐开线齿轮传动的轴承磨损后,中心距变大,这时传动比将(① 增大② 减小③ 不变)8. 三心定理意指作平面运动的三个构件之间共有瞬心,它们位于。
9. 在平面中,不受约束的构件自由度等于,两构件组成移动副后的相对自由度等于。
10. 在曲柄滑块机构中,以滑块为主动件、曲柄为从动件时,则曲柄与连杆处于共线时称机构处于位置,而此时机构的传动角为度。
二、完成下列各题(共20 分,每题 5 分)1. 试计算图示机构的自由度 (写出计算公式,若有,请指出复合铰链、局部自由度和虚约束 )。
2. 图示轴颈与轴承组成的转动副,轴颈等速运转,已知: 为摩擦圆半径, Q为作用于轴颈上的外载荷。
(1) 写出轴颈所受总反力 R 12 的大小,并在图中画出其方向; (2) 写出驱动力矩 M d 的表达式,并在图中画出方向。
3. 图示为等效构件在一个稳定运转循环内的等效驱动力矩 M d 与等效阻力矩 M r 的变化曲线,图中各部分面积的值代表功(1) 试确定最大盈亏功Δ W max ; (2) 若等效构 件平均 角速 度 m = 50rad/s ,运转速度不均匀系数δ =0.1,试求等效构件的 min 及 max 的值及发生的 位置。
《机械原理》试题及答案
《机械原理》试题及答案试题 13、转动副的自锁条件是驱动力臂≤摩擦圆半径。
一、选择题(每空 2 分,共 10 分)4、斜齿轮传动与直齿轮传动比较的主要优点:啮合性能好,重合度大,结构紧凑。
1、平面机构中,从动件的运动规律取决于D。
A 、从动件的尺寸B 、机构组成情况C 、原动件运动规律D 、原动件运动规律和机构的组成情况2、一铰链四杆机构各杆长度分别为30mm ,60mm ,80mm ,100mm ,当以 30mm 5、在周转轮系中,根据其自由度的数目进行分类:若其自由度为 2,则称为差动轮系,若其自由度为 1,则称其为行星轮系。
6、装有行星轮的构件称为行星架(转臂或系杆)。
7、棘轮机构的典型结构中的组成有:摇杆、棘爪、棘轮等。
三、简答题(15 分)1、什么是构件?的杆为机架时,则该机构为A 机构。
答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的A 、双摇杆B 、双曲柄C 、曲柄摇杆单位体。
2、何谓四杆机构的“死点”?答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从 D 、不能构成四杆机构动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动,3、凸轮机构中,当推杆运动规律采用C时,既无柔性冲击也无刚性冲击。
A 、一次多项式运动规律B 、二次多项式运动规律C 、正弦加速运动规律D 、余弦加速运动规律4、平面机构的平衡问题中,对“动不平衡”描述正确的是B 。
A 、只要在一个平衡面内增加或出去一个平衡质量即可获得平衡B 、动不平衡只有在转子运转的情况下才能表现出来机构的这种传动角为零的位置称为死点。
3、用范成法制造渐开线齿轮时,出现根切的根本原因是什么?避免根切的方法有哪些?答:出现根切现象的原因:刀具的顶线(不计入齿顶比普通齿条高出的一段c*m )超过了被切齿轮的啮合极限点 N 1,则刀具将把被切齿轮齿根一部分齿廓切去。
《机械原理》试卷答案(02级)

《机械原理》考试卷参考答案02一、填空(每空1分,共20分)1.零件、构件、原动件2.摇杆、从动曲柄、连杆3.曲柄摇杆、双曲柄、双摇杆4.从动件受到凸轮的驱动力、从动件速度方向5.节、分度圆6.主轴角速度、运动不均匀系数、飞轮的转动惯量7.棘轮机构、不完全齿轮机构、槽轮机构、凸轮式间歇机构等任选两个8.C、A9.A10.轮、调速器11.离心惯性力向量和等于零且力偶矩代数和等于零二、简答题(每题6分,共30分)1.答:----------------------------------------------------------------------6分在实际机械中常常存在虚约束是为了增加机械的刚度、平衡惯性力。
2.答-------------------------------------------------------------------------6分1)控制齿数Z>Z min2)正变位X>X min3)不采用展成法加工3.答:----------------------------------------------------------------------6分定义:实际啮合线长度与基圆齿距之比。
重合度反映一对齿轮是否能实现连续传动。
重合度与模数无关,随齿数的增加而增加,中心距加大时重合度减小。
4.答-------------------------------------------------------------------------6分惯性力是加在有变速运动的构件上的虚拟力。
当构件加速运动时,惯性力为阻力;当构件减速时为驱动力。
在一个运动循环中作功和为0。
5.答:-----------------------------------------------------------------------6分 偏置的目的:减小凸轮机构推程压力角。
ηδ=1。
机械原理模拟试卷及答案
机械原理模拟试卷(一)一、选择题(每题2分,共20分)1. 两个运动构件间相对瞬心的绝对速度。
(①均为零②不相等③不为零且相等)2. 机构具有确定运动的条件是原动件数目等于的数目。
(①从动件②机构自由度③运动副)3. 若标准齿轮与正变位齿轮的参数m,Z,α,h a*均相同,则后者比前者的:齿根高,分度圆直径,分度圆齿厚,周节。
(①增大②减小③不变)4.在高速凸轮机构中,为减少冲击与振动,从动件运动规律最好选用运动规律。
(①等速②等加等减速③余弦加速度④正弦加速度)5. 静平衡的转子是动平衡的;动平衡的转子是静平衡的。
(①一定②不一定③一定不)6. 机械系统在考虑摩擦的情况下,克服相同生产阻力时,其实际驱动力P与理想驱动力P0的关系是:P P0。
(①小于②等于③大于④大于等于)7.差动轮系是指自由度。
(①为1的周转轮系②为2的定轴轮系③为2的周转轮系)8. 设计标准齿轮时,若发现重合度小于1,则修改设计时应。
(①加大模数②增加齿数③加大中心距)9. 曲柄滑块机构若存在死点时,其主动件必须是,在此位置与共线。
(①曲柄②连杆③滑块)10. 周转轮系的传动比计算应用了转化机构的概念。
对应周转轮系的转化机构乃是。
(①定轴轮系②行星轮系③混合轮系④差动轮系)二、简答题(每题5分,共25分)1. 计算图示机构自由度,若有复合铰链、局部自由度及虚约束需指出。
2. 图示楔块机构,已知:P 为驱动力,Q 为生产阻力,f 为各接触平面间的滑动摩擦系数,试作:(1) 摩擦角的计算公式ϕ= ;(2) 在图中画出楔块2的两个摩擦面上所受到的全反力R 12, R 32两个矢量。
3. 试在图上标出铰链四杆机构图示位置压力角α和传动角γ。
4. 如图所示,薄壁上有不平衡重Q 1=10N 、Q 2=20N ,所在半径分别为:r 1=200mm ,r 2=100mm 。
试求:1) 在r =100mm 半径的圆上,应加配重Q=? 2) 配重Q 的方位与OX 轴之间的夹角α=?5. 试标注出在图示位置时机构中瞬心P 12、P 23、P 14、P 34、P 24的位置。
(完整)机械原理试题及答案,推荐文档.docx

机械原理考试试卷题号一二三四五六七八九十总分得分签名一、选择题 : (以下各题中,只有一个答案是正确,请选正确答案。
每题 2 分,共20 分)1.一个转动副引入B个约束,一个移动副引入B个约束 ,而一个高副引入A个约束。
A . 1B . 2C. 32.在凸轮机构推杆常用运动规律中,A运动规律有刚性冲击,而 B 运动规律有柔性冲击。
A .等速B.等加速等减速C.简谐3.设计滚子推杆盘形凸轮廓线时,其最小曲率半径ρC滚子半径 r时 ,凸轮的实际min T 廓线为一平滑曲线。
A .等于B .小于C.大于4.为了提高机构的传动性能,要求机构的最大压力角B许用压力角。
A .等于B .小于C.大于5.四杆机构已知a=c<b<d,且 b//d,当取 d 为机架时得到B。
A .双曲柄机构B .双摇杆机构C.曲柄摇杆机构6.有一斜齿轮和圆锥齿轮其齿数为Z,斜齿轮的螺旋角为,锥齿轮的圆锥角为,则它们的当量齿数Z v为 B。
A. Z vZcos Z v Z,B. Z v Z3Z v Z C.Z v Z3, Z v Z3 cos cos cos cos cos7.正变位齿轮与同样 m、 z、α的标准直齿圆柱齿轮比较,其齿顶圆齿厚将A。
A.增大 B .减小C.不确定8.经过静平衡的回转件 C 动平衡的,而经过动平衡的回转件A的。
A .一定是B .一定不是C.不一定是9.在凸轮机构中,凸轮的基圆半径r b越大,则凸轮机构的压力角就B。
A.越大B.越小C.不变110.为了减小飞轮的重量和尺寸,应将飞轮按装在机器的B。
A .低速轴B.高速轴C.根据具体问题具体确定二、填空题:1.5 分,共 15分)(每题1. 蜗轮蜗杆传动的正确啮合条件是在主平面内蜗杆的轴向模数与压力角分别与蜗轮的端面模数和压力角相等。
2.渐开线齿廓的可分性是传动比只与齿数有关,与中心距无关。
3 机构具有确定运动的条件是自由度大于 0,且等于原动件的个数。
机械原理双语

题9-1图M ω题9-1图习 题9-1 在题9-1图所示的凸轮机构中,μL (实际尺寸/图上尺寸)=10,凸轮1为主动件,推杆3为从动件。
(1) 画出凸轮的理论基圆并量取半径r 0(参考答案:r 0=139.5 mm ); (2) 标出凸轮机构在图示位置的压力角α并量取α(参考答案:α=21°); (3) 标出并量取从动件的位移S (参考答案:S =93 mm ); (4) 标出并量取从动件的行程h (参考答案:h =134 mm );(5) 若主动力矩M d =10 Nm ,不计所有运动副的摩擦,求图示位置的工作阻力F r (F r =82 N );(6) 偏心距e 的引入对受力是否有利(参考答案:有利)。
解:(1) 量出基圆半径r 0=13.95×μL =139.5 mm ; (2) 该位置从动件的压力角α=21°;(3) 该位置时从动件的位移S =9.3×μL =93 mm ; (4) 该位置时从动件的行程h =13.4×μL =134 mm ;(5) 求此位置工作阻力F r 的大小 由M d ω1=F r V 3得F r 为F r =M d ω1/ V 3=M d /( V 3/ω1)=M d /(AP 13×μL ),AP 13=12.2 mm =0.0122 m , F r =10/(0.0122×μL )=82 N (6) 偏心距e 的引入对受力是否有利(有利)。
tan α=DP 13/(S 0+S )=(AP 13-e )/(S 0+S ),e 的存在使推程的压力角α减少,有利。
9-2 在题9-2图所示的凸轮机构中,μL (实际尺寸/图上尺寸)=10,凸轮1为主动件,推杆2为从动件,已知凸轮1的基圆半径r 0,从动件在推程[0,80º]的运动规律为S =b ·sin[9δ/(4π)] (mm),b 为常数。
《机械原理》试题及答案

1、什么是构件?
答:构件:机器中每一个独立的运动单元体称为一个构件;从运动角度讲是不可再分的单位体。
2、何谓四杆机构的“死点”?
答:当机构运转时,若出现连杆与从动件共线时,此时γ=0,主动件通过连杆作用于从动件上的力将通过其回转中心,从而使驱动从动件的有效分力为零,从动件就不能运动,机构的这种传动角为零的位置称为死点。
(1) 若此机构为曲柄摇杆机构,且AB为曲柄,求的最大值;
(2)若此机构为双曲柄机构,求的最小值;
(3)若此机构为双摇杆机构,求值的范围;
解:1)曲柄摇杆机构要求满足“杆长条件”;曲柄为连架杆且最短三个条件。
由“杆长条件”知:
即:
所以的最大值为:15mm
2)为双曲柄机构有两种情况:
满足“杆长条件";最短杆为机架;。
2、如图2所示机构中,各尺寸为:lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm,曲柄以等角速度ω1=10 rad/s运动,试用图解法求机构在时,点D和E的加速度,以及构件2的角速度和角加速度.(15分)
解:以μl=0.0025m/mm作机构的位置简图,如图a所示。此机构中构件2和摇块3组成移动副,且构件2作平面一般运动,选C(C2和C3)为重合点,则Vc3=VC4=0,ac3=ac4=0,ω3=ω2,α3=α2。
i.速度分析
取μv=0.005m·s-1/mm作上式的速度图(图b),再根据速度影像原理得点d及e.
ii.加速度分析
以μa=0.04m·s—2/mm作加速度图(图c),再加速度影像原理得点d’和e',由图可得:
3、设计一对渐开线外啮合标准齿轮圆柱齿轮机构。已知z1=18,z2=36,模数m=3,压力角α与齿顶高系数为标准值,试求:(10分)
机械原理双语

习题
6-1 题 6-1 图(a)为一偏置曲柄滑块机构。偏心距 e=-0.15 m;曲柄 1 的杆长 a=0.35 m,质心在 A 点,转动惯量 JA=0.08 kgm2,角速度 ω1=18 rad/s;连杆 2 的杆长 b=1.05 m, 关于质心 C2 的转动惯量 JC2=0.45 kgm2,b2=BC2=0.5 m,质量 m2=60 kg;滑块 3 的质量 m3=100 kg。
450
650
解:
Ⅰ
m
Ⅱ
PⅠ=(mω2e)×650/1100=mAω2r=500mAω2
O
O
mA=(400×200)×650/(1100×500)=94.545 kg
r e
r
mA A
题 6-5 图
mB B
PⅡ=(mω2e)×450/1100=mBω2r=500mBω2 mB=(400×200)×450/(1100×500)=65.455 kg
(2) 使校正平面Ⅰ、Ⅱ上的惯性力与所加平衡质量的惯性力等于零
PAⅠ+PBⅠ+PCⅠ+P∑Ⅰ=0 PAⅡ+PBⅡ+PCⅡ+P∑Ⅱ=0
P∑Ⅰ
PCⅠ PBⅠ
φ∑Ⅰ PAⅠ
P∑Ⅰ/ω2=17.29×78/26=51.871=m∑ⅠrⅠ=32 m∑Ⅰ P∑Ⅱ/ω2=17.29×78/26=51.871=m∑ⅡrⅡ=32 m∑Ⅱ m∑Ⅰ=m∑Ⅱ=51.871/32=1.621 kg φ∑Ⅰ=60° φ∑Ⅱ=φ∑Ⅰ+180=240°
z Ⅰ
m2Ⅰ
m3Ⅰ r2Ⅰ
m1Ⅰ
r3Ⅰ O r1Ⅰ
x
r∑Ⅰ
m∑Ⅰ
P3Ⅰ
P2Ⅰ
P∑Ⅰ
P1Ⅰ
z
Ⅰ
m2 r2
机械原理双语

题10-2图习 题10-1 一对渐开线标准齿轮在标准中心距下传动,传动比i 12=3.6,模数m =6 mm ,压力角α=20°,中心距a =345 mm ,求小齿轮的齿数z 1,分度圆直径d 1,基圆直径d b1,齿厚s 与齿槽宽e ,基圆齿厚s b1。
解:(1) 计算小齿轮的齿数由a =m (z 1+z 2)/2=m z 1 (1+i 12)/2=6 z 1 (1+3.6)/2=345 mm 得z 1=25,z 2=25×3.6=90(2) 计算小齿轮的分度圆直径 d 1=mz 1=6×25=150 mm(3) 计算小齿轮的基圆直径 d b1=d 1cos α=150 cos20°=140.954 mm(4) 计算小齿轮的齿厚 s =m π/2=6×π/2=9.425 mm(5) 计算小齿轮的齿槽宽 e =m π/2=6×π/2=9.425 mm(6) 计算小齿轮的基圆齿厚)inv inv (2K K K K αα−−=r rr s s ,αααinv 2)inv inv (21b 11b 1b 1b 11b 1b r r r s r r r s s +=−−= mm 957.10)180/π2020(tan 954.140150954.140425.902inv 21b 11b 1b =×−×+=+=o o o r r r s s10-2 一对渐开线标准齿轮在标准中心距下传动,如题10-2图所示,已知模数m =4 mm ,齿数如图所示,压力角α=20°,求中心距a ,小齿轮分度圆直径d 1,齿顶圆直径d a1,齿根圆直径d f1,基圆直径d b1,基圆齿厚s b1。
解:由图得z 1=18 z 2=24 (1) 计算中心距a =m (z 1+z 2)/2=4(18+24)/2=84 mm(2) 计算小齿轮分度圆直径d 1=mz 1=4×18=72 mm(3) 计算小齿轮齿顶圆直径d a1=(z 1+2*a h )m =(18+2)×4=80 mm(4) 计小齿轮齿根圆直径d f1=(z 1-2*a h -2∗c )m =(18-2-0.5)×4=62 mm (5) 计算小齿轮基圆直径d b1=d 1cos α=72cos20°=67.658 mm(6) 计算小齿轮基圆齿厚913.6)180/π2020(tan 658.6772658.672π402inv 21b 11b 1b =×−×+×=+=o o o r r r s s mm ■ 10-3 在题10-2图所示的齿轮传动中,W k 表示跨k =3个齿的公法线,跨齿数k =α z /180º+0.5,α为压力角,α=20°,通过测量W k ,可以检测标准齿轮分度圆上的齿厚。
机械原理(双语)试卷2答案
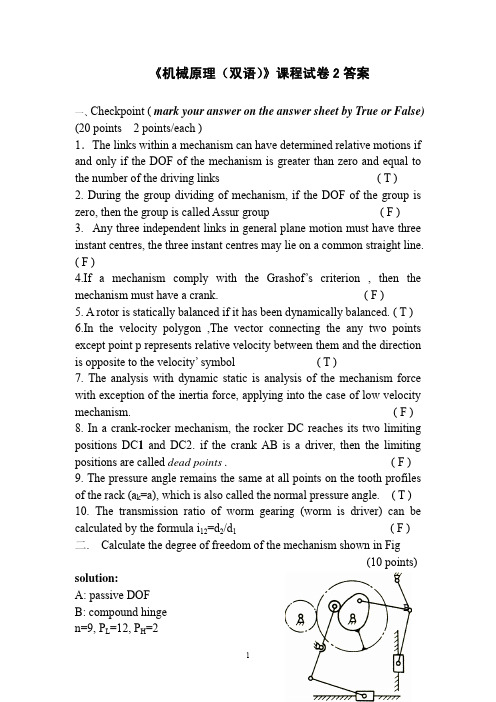
《机械原理(双语)》课程试卷2答案一、Checkpoint ( mark your answer on the answer sheet by True or False)(20 points 2 points/each )1.The links within a mechanism can have determined relative motions if and only if the DOF of the mechanism is greater than zero and equal to the number of the driving links ( T )2. During the group dividing of mechanism, if the DOF of the group is zero, then the group is called Assur group ( F )3. Any three independent links in general plane motion must have three instant centres, the three instant centres may lie on a common straight line. ( F )4.If a mechanism comply with the Grashof’s criterion , then the mechanism must have a crank. ( F )5. A rotor is statically balanced if it has been dynamically balanced. ( T )6.In the velocity polygon ,The vector connecting the any two points except point p represents relative velocity between them and the direction is opposite to the velocity’ symbol ( T )7. The analysis with dynamic static is analysis of the mechanism force with exception of the inertia force, applying into the case of low velocity mechanism. ( F ) 8. In a crank-rocker mechanism, the rocker DC reaches its two limiting positions DC1 and DC2. if the crank AB is a driver, then the limiting positions are called dead points . ( F ) 9. The pressure angle remains the same at all points on the tooth profiles of the rack (a k=a), which is also called the normal pressure angle. ( T ) 10. The transmission ratio of worm gearing (worm is driver) can be calculated by the formula i12=d2/d1 ( F )二. Calculate the degree of freedom of the mechanism shown in Fig(10 points) solution:A: passive DOFB B: compound hingen=9, P L=12, P H =2F=3n-2P L-P H (3 points)=3×9-2×12-2=1 (7 points)三. For the plate cam mechanism with translating inline roller follower as shown in Fig, the cam contour is circle(the radius r =100mm), the radius of roller r R=10mm, OC=20mm, the cam rotates at anticlockwise .1). Draw out the pitch curve of the cam mechanism2). Find out the radius of prime circle r p=?3). Find out the lift of follower h=? Array4).(20 points)solution:1). the pitch curve of the cam mechanismAs shown in Fig dotted circle (2 points)2). r p=r-OC+r T=90mm (2 points)3). h=2 OC=40mm (2 points)4). As shown in Fig (2 points)5).As shown in Fig (2 points)四. Design an offset slider-crank mechanism by graphic method. The offset e is 16mm. The coefficient K of travel speed variation is to be 1.2. The working stroke H of the slider is to be 50mmsolution:θ=1800(k-1)/(k+1)=1800(1.2-1)/(1.2+1)=16.40 (3 points)Select u L =2, Design the offset slider-crankmechanism by graphic method (8 points)then :L BC -L AB =AC1. x u l =36L BC +L AB =AC2 x u l =86L AB =25mmL BC =61mm(4 points) 五. A pair of standard spur involute gears has a module of 10mm, pressure angle α=200, transmission ratio i 12=2. the numbers of teeth z 1=30. 1. Find out reference diameters d 1,d 2,2. Tooth thickness s and spacewidth e .3. Find out reference centre distance a3. If working centre distance a’= a+1, find out working pressure angle α’ (15 points)solution:1 i 12=2 Z 2= Z 1x2=80d 1=m Z 1=300mm ,d 2=m Z 2=600mm , (4 points)2. P=πm=31.4mmS=e=πm/2=15.7mm (4 points)3. a=(d 1+d 2)/2=450mm (3 points)4. acos α= a’cos α’450cos200=451cos α’ α’=20.30 (4 points) PA C2C1 θe六. The numbers of teeth of the gears in the gear train shown in Fig are given as Z 1=20, Z 2=40, Z 2’=20 Z 3=30and Z 4=80.Calculate the train ratio i lH · (15points) solution:1.Dividing the gear traingear train with fixed axes :gear1_gear2planetary gear train:gear 2’_gear3_carrier H_ gear4 (5 points)2. Calculate the train ratio i lHgear train with fixed axes :i 12=n 1/n 2=-z 2/z 1=-2n 2=- n 1/2 (1) (2 points)planetary gear train:4/10'24'2'24'24'2−=−=−=−−=−−=Z Z n n n n n n n n n i HH H H H H(4 points) 2'2n n = H n n 52= (2) (2 points)(2 points)102/15112−==−==HH H n n i n n n。
机械原理习题集英汉双语教学课件ppt作者张春林试卷答案

试卷1一、填空题(20分)1.等于。
2.不变,变大。
3.法面模数相等、法面压力角相等、螺旋角大小相等方向相反。
4.惰(或介)轮。
5.加大基圆半径,加大偏距。
6.棘轮机构、槽轮机构、不完全齿轮机构。
7.1)曲柄摇杆机构、2)双曲柄机构、3)双摇杆机构。
8.死点位置,γ=0。
9.周期性、高速。
10.惯性力,惯性力惯性力矩。
二、(12分)F =3n -(2p l +p h )=3×8-(2×11+1)=1B 处为局部自由度,E 处为复合伎链,LK 杆及其运动副为虚约束,H 与I 有一个移动副为虚约束。
三、(10分)四、(14分)l.1212121)1()(a z i m z z m +=+=mz 1=80若m =3,z 1=26.6,为非整数,不行;若m =4,z 1=20,可以;若m=5,z 1=16<17,z 1根切,不行。
所以取m =4mm ,z 1=20,z 2=302.mm m h mz a a 64r *2212=+=,mm mz 60r 2212==mm mz b 38.56cos r 2212==α,mm m c h mz a f 55)(r **2212=+-=3.图中理论啮合线为N 1N 2段,实际瞄合线为B 1B 2段。
见图2。
五、(14分)4、5、6组成定轴轮系:i 46=ω4/ω6=-2.5(1)1、2、3及6(系杆)组成周转轮系:6.413636113-=-=--=z z i H ωωωω(2)由(1)得ω4=-2.5ω6,则ω3=ω4=-2.5ω6,代入(2)得:i 16=17.1。
齿轮6的转向与ω1相同。
六、(10分)见图3。
︒=︒+-=3611K K θ(1)任选一点D ,以D 为顶点作等腰△DC 1C 2,DC 1=DC 2=50mm ,∠C 1DC 2=40°(μl =0.001m/mm);(2)作∠C 1C 2P =90°,∠C 2C 1P =90°-θ=54°,C 2P 与C 1P 交于P 点;(3)作直角△C 1C 2P 的外接圆;因为C 1C 2=2l DC sin20°=34.2mm ,又△AC 1C 2中:C 1C 22=(l BC +l AB )2+(l BC -l AB )2-2(l BC +l AB )(l BC -l AB )cos θ,解得l AB ≈7.7mm 。
机械原理双语习题全解

6-2 如图所示,设已知四杆机构各构件的长度分别为:
试问a 要 使2 此机m 构成4 , 为b 双6 摇杆m 0 m 机构0 , ,c 则 应4 取m 0 哪m 个0 , 杆d 为 机5 架m 0 ?m 且 0
K’OK’= ’a’a / r-b θk’ + θk’’
同一基圆上任意两条渐开线的距离处处相等;
a’a = K’K = 15mm
a’a / rb= 15 / 30 = 0.5 rad
θk’ =invαk’ = tan(αk’ )- αk’
= 0.2675 rad
θk’’ =invαk’’ = tan(αk’’ )- αk’’
曲柄存在条件 bae
aA
e O1
l
b
B
sinl/b
m axarcsin (lm ax/b)
故A点运动到最高位置时压力角 最大,传动角最小
max
arcsin(ae) b
m in 2 m a x 2 a rc sin (a b e)
(2)导杆机构有曲柄的条件及最小传动角
l1 B
A
l4
D
e
1)若A、D整周转动,应满足:
9
8-1 在下图中,已知基圆半径rb=50mm,求: 1) 当ri=65mm时,渐开线的展角θi、渐开线的压力角αi和曲率
半径ρi。 2) 当θi=20°时,渐开线上的压力角αi及向径ri的值。
解:
1)αi = arccos(rb/ri ) =arccos(50/65) = 39.715°
=39°42’ 54’’
2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械原理(双语)》课程试卷2
得分评阅教师
一、Checkpoint ( mark your answer on the answer sheet by True or False)
(20 points 2 points/each )
1.The links within a mechanism can have determined relative motions if and only if the DOF of the mechanism is greater than zero and equal to the number of the driving links ( )
2. During the group dividing of mechanism, if the DOF of the group is zero, then the group is called Assur group ( )
3. Any three independent links in general plane motion must have three instant centres, the three instant centres may lie on a common straight line. ( )
4.If a mechanism comply with the Grashof’s criterion , then the mechanism must have a crank. ( )
5. A rotor is statically balanced if it has been dynamically balanced. ( )
6.In the velocity polygon ,The vector connecting the any two points except point p represents relative velocity between them and the direction is opposite to the velocity’ symbol ( )
7. The analysis with dynamic static is analysis of the mechanism force with exception of the inertia force, applying into the case of low velocity mechanism. ( ) 8. In a crank-rocker mechanism, the rocker DC reaches its two limiting positions DC1 and DC2. if the crank AB is a driver, then the limiting positions are called dead points . ( ) 9. The pressure angle remains the same at all points on the tooth profiles of the rack (a k=a), which is also called the normal pressure angle. ( ) 10. The transmission ratio of worm gearing (worm is driver) can be calculated by the formula i12=d2/d1 ( )
得分评阅教师
二. Calculate the degree of freedom of the mechanism as shown in Fig
(10 points)
三. For the plate cam mechanism with translating inline roller follower as shown in Fig, the cam contour is circle(the radius r =100mm), the radius of roller r R =10mm, OC=20mm, the cam rotates at anticlockwise .
2). Find out the radius of prime circle r p =?
3). Find out the lift of follower h=?
(20 points)
得分 评阅教师 B
四. Design an offset slider-crank mechanism by
得分评阅教师
graphic method. The offset e is 16mm. The
coefficient K of travel speed variation is to be 1.2. The working stroke H of the slider is to be 50mm (15 points)
得分评阅教师
五. A pair of standard spur involute gears has a module of 10mm, pressure angle α=200, transmission ratio i12=2. the numbers of teeth z1=30.
1. Find out reference diameters d1, d2
2. Tooth thickness s and spacewidth e
3. Find out reference centre distance a
3. If working centre distance a’= a+1, find out working pressure angle α’ (15 points)
得分
评阅教师
六. The numbers of teeth of the gears in the gear train shown in Fig are given as Z1=20, Z2=40, Z2’=20 Z3=30and Z4=80.
Calculate the train ratio i lH (20 points)。