rcta倒车侧后方盲点警示系统
雷克萨斯GX:
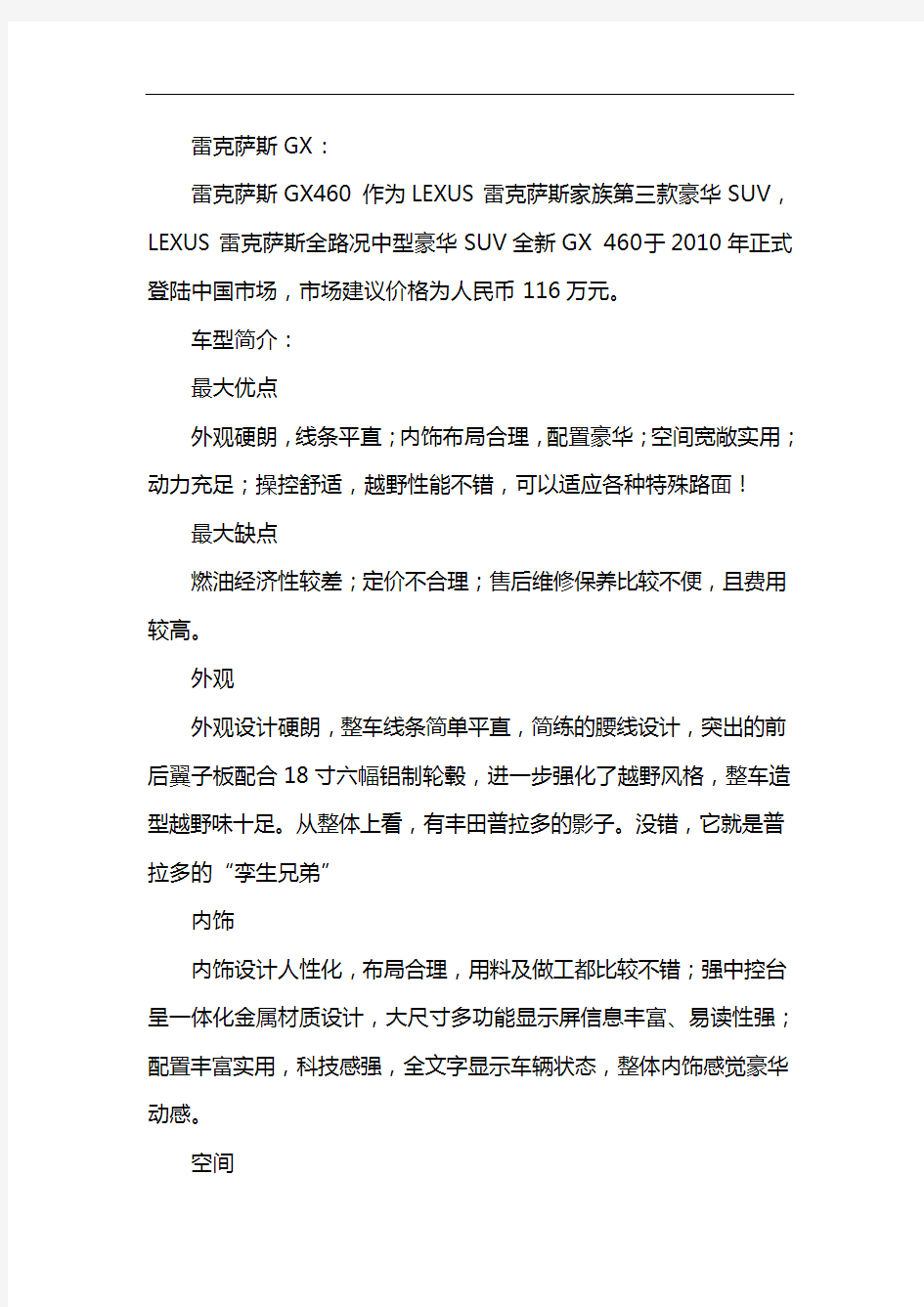
雷克萨斯GX460 作为LEXUS雷克萨斯家族第三款豪华SUV,LEXUS雷克萨斯全路况中型豪华SUV全新GX 460于2010年正式登陆中国市场,市场建议价格为人民币116万元。
车型简介:
最大优点
外观硬朗,线条平直;内饰布局合理,配置豪华;空间宽敞实用;动力充足;操控舒适,越野性能不错,可以适应各种特殊路面!
最大缺点
燃油经济性较差;定价不合理;售后维修保养比较不便,且费用较高。
外观
外观设计硬朗,整车线条简单平直,简练的腰线设计,突出的前后翼子板配合18寸六幅铝制轮毂,进一步强化了越野风格,整车造型越野味十足。从整体上看,有丰田普拉多的影子。没错,它就是普拉多的“孪生兄弟”
内饰
内饰设计人性化,布局合理,用料及做工都比较不错;强中控台呈一体化金属材质设计,大尺寸多功能显示屏信息丰富、易读性强;配置丰富实用,科技感强,全文字显示车辆状态,整体内饰感觉豪华动感。
空间
全新GX车型车身长、宽、高分别为4805mm、1885mm及1885mm,轴距为2790mm,内部空间设计灵活,第二排腿部空间略显紧凑,第二三排座椅可以成比例放倒,后备箱容积大,储物能力出色。
操控
雷克萨斯GX整体操控舒适,坐姿高,视野好;盘高扎实,,通过性强;越野性能不错。
动力
搭载了4.6升V8顶置双凸轮轴带双智能正时可变气门控制系统汽油发动机,动力输出充足,提速快。
低配置400版本的采用和丰田普拉多一样的4.0升V6发动机。
油耗
雷克萨斯GX的燃油经济性较差,油耗偏高。
GX车型推出:
自2003年在北美推出第一代GX车型以来,LEXUS雷克萨斯即将出色的越野性能及舒适的驾乘感受完美融合,前瞻性地开创了中型豪华SUV细分市场,并引领着这一领域车型的发展方向。GX460秉承了前代车型硬朗的外型和出色道路通过性能,致力于为每一位乘员提供随时随地的激情驾驭体验。
GX460将L-finesse设计理念的优雅人性化与硬派SUV产品的强劲刚毅完美融合,塑造出粗犷豪放且不失精致内涵的风范。在LEXUS雷克萨斯家族中GX 460率先配备了电子动态悬架系统
(KDSS)、四种道路模式选择(Multi-terrain Select)及多地形监测系统(Multi-terrain Monitor)等在内的多项前瞻智能科技。高强度非乘载式车身结构与刚性后轴相结合,共同打造强劲牵引力、舒适驾驭感以及同级别车型中领先的静谧性。GX 460搭载了4.6升V8顶置双凸轮轴带双智能正时可变气门控制系统(Dual VVT-i)汽油发动机,能够在5,500转/分钟时输出218千瓦的最大功率,并能在3,500转/分钟时产生438牛·米的最大扭矩。值得一提的是GX的外观和配置上和丰田普拉多很像,因为它和普拉多用的是一个底盘,同一条生产线上出来的!
基于51单片机倒车防撞报警系统
摘要 随着中国经济的持续发展和汽车价格的持续下降,越来越多的家庭拥有自己的汽车,汽车的安全也成为亟待解决的问题。对汽车倒车预警技术的研究,具有重要的现实意义。基于51单片机的超声波测距仪之倒车雷达装置,安装在汽车上,可以及时了解前方与后方的障碍物情况,随时做出正确的判断,保障人类的生命安全。在此基础上,本文研究了基于51单片机倒车防撞报警系统,首先简要阐述了本文的研究背景、意义、超声波测距的基本理论,并介绍了超声波测距报警系统。根据型电气设备的设计要求,在传统非超声波测距系统的基础上,设计并实现了超声波测距报警系统。整个测距系统的实现包括数字电路设计、模拟电路设计和软件的编辑。 关键词:51单片机;倒车防撞报警系统;超声波测距
ABSTRACT As China's economy continues to develop and car prices continued to decline, more and more families have their own cars, car safety has become a problem to be solved. It is of great practical significance to study the warning technology of car astern. Ultrasonic range finder based on 51 single chip microcomputer of reversing radar system, installed on the car, can timely understand the front and rear obstacles, at any time to make the right judgment, to ensure the safety of human life. On this basis, this paper studies the reverse collision warning system based on 51 single-chip processor, this paper expounds the research background, significance of this article, the basic theory of ultrasonic ranging, and introduces the ultrasonic ranging alarm system. According to the design requirement of the electric equipment, the ultrasonic range alarm system is designed and implemented on the basis of the traditional non-ultrasonic range system. The implementation of the whole range system includes digital circuit design, analog circuit design and software editing. Keywords: 51 microcontroller; Reversing alarm system Ultrasonic ranging
路虎盲点监视系统
盲点监视器 盲点监测器 (BSM) 系统是对安全驾驶方式以及正确利用车外后视镜和车尾后视镜的补充,而非其替代功能。该系统并非会在所有速度、天气和路面状况下工作。 对于从本车后方快速靠近的车辆或被本车快速超越的车辆,BSM 可能无法准确报警。 BSM 可能无法检测到所有车辆,也可能检测到路边护栏等物体。请始终安全驾驶并使用车外后视镜避免 发生事故。 BSM 使用雷达传感器,其可能被雨水、积雪或道路溅水损坏。这可能会影响系统在盲点范围内检测道路使用者的能力和可靠性。 驾驶员不应假定 BSM 将校正行驶中 的判断错误。 不要将不干胶标签或物体贴到或系于车尾保险杠上,因为这样可能会妨碍雷达传感器工作。 注意: 确保车外后视镜上的报警指示器未被标签或其他物体遮挡。 注意: BSM 雷达传感器在所有承认欧盟无线电与电信终端设备 (RTTE) 指令的国家/地 区得到使用许可。 盲点监视器 (BSM) 系统可监控驾驶员不易看到的车辆周围区域。该系统用于识别盲点范围内超车车辆 (3) 的任何道路使用者,而忽略那些静止不动或反方向行驶等的其他物体。 注意: 请参阅本章节开头处的警告、小心和注意,了解系统的限制。 如果系统确认一个物体为超车道路使用者,则一个琥珀色警告图标 (1) 即会在相关车外后视镜中点亮,警示驾驶员车辆盲点内存在潜在危险,因此改道可能极为危险。系统可监视车外后视镜向后的延伸区域,车轮后方大约 6 米(20 英尺)以及车辆侧面大约 2.5 米(8.2 英尺)。此为典型车道宽度。
注意:此系统覆盖相当于一个固定车道宽度的范围。如果车道比典型马路车道窄,则会检测到非邻近车道中移动的物体。 当车辆以高于 10 公里/小时(6 英里/小时)的速度向前行驶时,BSM 会自动开启激活。当系统启动后,会进行自检,在自检过程中,各后视镜上的报警图标交替显示一小段时间。 指示点 (2) 将会保持点亮,直到车辆前进速度超过 10 公里/小时(6 英里/小时)。 注意:当选择了倒车档 (R)、车辆处于驻车档 (P)、车辆行驶速度低于 5 公里/小时(3 英里/小时)时,BSM 将自动关闭。在这些条件下,如果车辆未安装倒车交通检测,则车外后视镜内的琥珀色警告灯将会显示。请参阅111, 倒车交通检测。 BSM 的设计目的是为车辆在多车道公路上行驶时提供最有效的辅助作用。 可通过仪表板菜单启用或禁用 BSM。请参阅39, 仪表板菜单。 注意:如果同时在本车两侧检测到正在超越的车辆,则两个后视镜上的报警图标都将点亮。 注意:当连接拖车时,BSM 将会禁用。
盲点监测系统的利与弊
盲点监测系统的利与弊 盲点监测系统是驾驶辅助系统中的一项关键功能,在低速状态时覆盖车身周围360°路况。主动安全循环检测体系中还包括自适应巡航控制、车道偏离警告、停车声纳等。一些驾驶辅助系统让你行车变得更安全,尤其是在长时间驾车的过程中。 盲点不盲 当驾驶者在迅速察看了内视镜和外视镜并可能快速回头一瞥然后准备放心超车时,忽然听到来自左侧的一记大声警告。驾驶者很容易漏看超车道上从后面快速接近的车辆或者位于与其汽车并排的盲点区域的车辆,特别是在多车道高速公路或干线公路的繁忙交通以及城市交通中。大陆集团开发的盲点探测系统(BSD)在这时可以通过监视驾驶者难以看见的区域来缓解其大部分压力和避免危险情况的发生。如果车道变换辅助系统指示没有合适的超车间距,则驾驶者的注意力就会被吸引向前方——因为您永远不会知道前方车辆是否进行了意外的制动。 基础技术 雷达传感器或摄像头负责监视车辆后面和侧面的道路空间,并在外后视镜上显示一个视觉信号,以提示盲点区域是否有运动的汽车存在。一些车型还会在驾驶者不顾盲点区域有车辆存在而想变换车道(通过打转向灯)时向其提供附加的触觉警告,亦即振动其座椅。尽管每个汽车生产商用于警告驾驶者的设计方案各不相同,但外后视镜近旁的指示器是必须有的。 盲点监测系统的利与弊 在学习驾照时,教练会告诉你在变道时需要回头看一眼,因为侧视镜具有盲点,并不能完全覆盖后方道路情况。而当你这匆忙一瞥所来不及看清的物体,就是盲点检测系统的“工作职责”。该系统能够感知车辆后方盲点区域内存在的车辆,并在司机打开转向灯时对司机发出警告。在侧视镜处会有小灯闪烁以示警告,此外还有方向盘震动或声音警告。若司机没有打开转向灯,那么警示灯在检测到车辆后会保持常亮状态,而不闪烁。
汽车倒车防撞报警器
2009届本科毕业设计 汽车倒车防撞报警器 姓名: 系别: 专业: 学号: 指导教师: 2009年4月10日
商丘师范学院学士学位毕业设计 目录 摘要 (3) 关键词 (3) 0引言 (4) 1工作原理 (4) 1.1At89C2051单片机性能及特点 (4) 1.1.1 89122051主要特点 (4) 1.1.2硬件结构 (4) 1.2霍尔传感器的测速原理 (4) 1.2.1霍尔效应 (5) 1.2.2工作原理 (5) 1.2.3 测量磁场及工作设置 (5) 1.2.4霍尔电路设计 (6) 2 总体结构设计 (6) 2.2 单片机系统电路设计 (7) 2.2.1 超声波发射电路设计和超声波接收电路 (7) 2.2.2 测速电路 (8) 2.2.3 报警电路 (8) 2.2.4LED显示电路 (9) 2.2.5报警器外围接口电路如图五 (10) 2.3软件设计 (10) 2.4 程序设计 (10) 3结束语 (12) 参考文献: (12) 致谢 (12) 2
商丘师范学院学士学位毕业设计 汽车倒车防撞报警器 摘要 设计了一种汽车倒车防撞系统。该系统以AT89C2051单片机为控制核心,工作时,超声波传感器采集的教据,由控制核心快速计算出汽车车尾与障碍物的距离,并通过LED 显示提醒信息,该系统主要利用单片机的实时控制和数据处理功能,完成系统的控制。最后阐述了报警器的硬件电路原理及软件设计。 关键词 AT89C2051 ;超声波;传感器 Develop and research a system which based on AT89C2051 microchip and alarm avoid cars crashing when back-off Abstract For purpose of develop a system which avoid cars crashing when back-off ,the system based on AT89C2051 microchip .First,the ultrasound sensor collect data .Then,the microchip process the Date to get the distance between rear end of car and obstacle.When the distance beyond safe distance.The LED display alarm to alert drivers. The system make use of microchip a rear-time control and processing function.At last ,the paper also state the hardware circuit principle of alarm and software design. Keyword AT89C2051;ultrasonic;sensor 3
传感器课程设计--汽车倒车防撞雷达系统设计
汽车倒车防撞雷达系统设计 摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。 关键词:倒车雷达超声波测距 1 概述 在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。 汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。 本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。系统硬件原理图如图1.1: 图1.1 倒车雷达报警系统框图
该系统整体设计思路如下: 警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。 ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。 温度采集模块不断测试环境温度,并将此信息传递给主控模块。主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。 主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。 2 系统硬件电路设计 系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。细分为六个小模块,各模块分析如下。2.1 主控和接口模块 主控和接口模块如图2.1所示。 Atmega16是基于AVRRISC结构的高性能、低功耗、高集成化的8位CMOS微控制器。由于其先进的指令集以及单时钟周期指令执行时间,加上片内32 个通用工作寄存器都直接与算术逻辑单元(ALU) 相连接,使得一条指令可以在一个时钟周期内同时访问两个独立的寄存器,大大提高了代码效率,运行速度比AT89C51高出10倍。 Atmega16的端口PC与JTAG接口相连。JTAG接口用于边界扫描,可以对片上16 KB 闪存Flash在线编程和调试,非常方便软件的升级,内部集成了较大容量的存储器和丰富强大的硬件接口电路,如定时/计数器、实时时钟、快速PWM通道、A/D转换器、I2C 的串行接口、可编程的串行USART接口、SPI串行接口和带片内晶振的可编程看门狗定时器以及片内的模拟比较器等,除传感器外几乎可以不需要其他任何元件即可构成系统,从而为本设计提供了灵活而低成本的解决方案。 Atmega16的管脚19和管脚16分别与超声波发射模块和超声波接收模块0
汽车各位置盲区图解
汽车各位置盲区图解 我们找来了一台SUV(长城赛弗)以及一台小型车(雪佛兰赛欧)来进行实测。测试的项目包括前部盲区区域、后部盲区区域、两侧盲区区域。首先我们来看看两种不同汽车的前部盲区有多大的区别。 我们首先调整座椅至合适位置,然后把雪糕筒放置在车辆前方。移动雪糕筒,使得驾驶员只能看到雪糕筒的顶端,此时雪糕筒至车头间的区域即为车辆的前部盲区(如图所示)。 经过实地测量,SUV前部盲区纵向距离达3米,而小型车前部盲区纵向距离仅有2.1米。从测试结果我们可以了解到,SUV的前部盲区比小型车要大。车身高度提高带来通过性提高的同时也增大了前部视觉盲区。 不同种类汽车后部盲区实测:
与前部视觉盲区的测试方式类似,我们在车辆后部设置雪糕筒。移动雪糕筒,使得驾驶员从内后视镜中只能看到雪糕筒的顶端,此时雪糕筒至车尾间的区域即为车辆的后部盲区(如图所示)。 经过实地测量,SUV后部盲区纵向距离达10米,而小型车后部盲区纵向距离却达到13米。从测试结果我们可以了解到,SUV较高的车身使得其后部盲区比小型车要小。小型车由于车身低矮,视线与地面夹角较小,因而盲区较大。 不同种类汽车外后视镜盲区实测: 测试完不同种类汽车的前后盲区区域,我们还测试了不同种类汽车外后视镜的盲区。我们把一台车开进两种不同车型的外后视镜盲区中,并用图片记录两台车的相对位置以说明不同车型外后视镜盲区的区别。 从测试结果可以看到,外后视镜盲区一般会出现在车辆的侧后方。SUV和小型车的左侧后视镜盲区区域位置大致一样,而右侧后视镜盲区则区别较大。位于小型车右侧后视镜盲区中的车子离副驾驶位距离较近,容易被驾驶员察觉;而位于SUV右侧后视镜盲区中的车子基本处于SUV的后方,这会造成转向或变线时因看不到盲区中的后车而造成事故。 据称可以缩小盲区的汽车用品实测: 网络上流传着各种声称可以缩小盲区的汽车用品,我们挑选了几样进行测试。我们测试的汽车用品有:广角内后视镜、倒车膜、外后视镜上附加的广角小圆镜。
汽车倒车防撞报警器
汽车倒车防撞报警器 一、任务与要求: 1)设计一套汽车倒车防撞报警系统, ◆ 要求有一台主机 ◆ 汽车与物体距离小于设定值时,利用蜂鸣器进行报警 ◆ 通过按键选择报警的距离 ◆ 数码显示选择的档位 2)已知条件:。。。。 3)主要技术指标: 1、输入电源:车用直流电源,DC12V 2、发射频率: 40kHz 3、接收频率: 40kHz(中心频率) 4、报警音量:≥。。分贝 5、探测距离:三档可调 二、实物设计所能达到的功能及操作说明: 硬件设计: 采用51系列单片机中的简易型产品AT89C2051作为中央处理器,选用专用配对的超声波组件,进行超声波信号与电信号的相互转换,利用
超声波传感器的选频特性,对接收到的超声波信号进行幅值判断,从而达到不同距离的选择与报警的目的。 操作说明: 1、接上电源,红色电源指示灯点亮,同时数码管显示"0",此时系统不发送超声波信号。 2、按动距离选择按键,蜂鸣器鸣叫,同时数码管显示0到3这几个数字,当显示1、2、3档时,设计与调试时设定的距离分别表示60厘米、50厘米、40厘米,只要有物体靠近探测器,就会发出"嘟、嘟、嘟"的报警声。 三、方案与论证: 1)汽车倒车防撞报警器的组成: 汽车倒车防撞报警器主要由超声波发生器、超声波发射电路、超声波接收电路、信号放大电路、直流控制电路、中央处理单元、数字显示电路、报警电路和距离选择电路等部分组成。发射电路发送超声波信号,当的射的信号被物体挡住时,反射回来的信号经接收器接收,进行两级放大后,再经倍压整流,形成一个直流控制电压,当这个电压值大于设定值时,表示物体离汽车的距离已小于设定距离,比较器输出低电平信号,系统据此判断出达到报警距离,驱动蜂鸣器进行报警,其框图如下:
汽车倒车报警系统论文
课程论文 题 目:汽车倒车报警系统分析 学生姓名: 学 院:能源与动力工程学院 班 级:交通运输10-2班 指导教师: 2014年 1 月 3 日 学校代码: 学 号:
内蒙古工业大学课程设计(论文)任务书课程名称:汽车电子控制技术学院:能源与动力工程学院班级: 学生姓名:学号: _ 指导教师:陈永艳 一、题目 汽车倒车报警系统分析 二、目的与意义 根据《汽车电子控制技术》课程学习的知识,系统分析汽车倒车报警系统结构组成及基本的工作原理,掌握汽车电子控制系统的基本结构与原理。 三、要求(包括原始数据、技术参数、设计要求、图纸量、工作量要求等) 根据参考文献,系统学习并分析汽车倒车报警系统结构组成及基本的工作原理;按照《内蒙古工业大学课程设计说明书(论文)书写规范》撰写课程论文。 四、工作内容、进度安排 18周周末:根据任务书要求,查阅、学习相关参考文献; 19周周一:提交论文提纲; 19周周二—周四:根据指导教师修改后的论文提纲撰写论文初稿; 19周周四—周五:根据指导教师对论文的修改意见修改论文; 19周周五:提交论文。 五、主要参考文献 [1] 刘修文.实用电子电路设计制作[M]. 北京:中国电力出版社,2011 [2] 胡萍. 超声波测距仪的研制[J]. 计算机与现代化,2010(10):54-56. [3] 陈有卿, 谢刚,新颖电子模块应用手册[M]. 北京:机械工业出版社,2010 [4] 电子报社.电子报2010年合订本下[J] .成都:四川科学技术出版社.2010 [5] 刘福太,梁发麦,魏书田,林红文.黄版电子电路[M].北京:科学出版社,2011 审核意见 同意。 系(教研室)主任(签字)赵明智 指导教师下达时间2013 年12 月27 日 指导教师签字:_______________
汽车盲区探测系统
在行车过程中,由于汽车车身结构的遮挡,即便是大尺寸的双曲率后视镜也无法避免驾驶者侧后方的盲区,这在并线等行车环节中就成为了安全隐患,而一些可以提示侧向盲区的电子安全辅助系统此时就派上了用场,国内消费者现在也能在一些车型上用到这些侧向盲区提示系统。 ● 沃尔沃BLIS系统 沃尔沃品牌一向以高安全性著称,因此一套缩写为BLIS(盲点信息系统)的盲区提示系统从2005年起率先在XC70、V70和S60等车型上得到了应用,此后沃尔沃的全系车型都相继采用了这套系统。
BLIS系统主要是利用位于外后视镜根部的摄像头对距离3米宽,9.5米长的一个扇形盲区进行25帧/秒的图像监控,如果有速度大于10公里/小时,且与车辆本身速度差在20-70公里/小时之间的移动物体(车辆或者行人)进入该盲区,系统对比每帧图像,当系统认为目标进一步接近时,A柱上的警示灯就会亮起,防止出现事故。
但是,类似BLIS这样的系统也有自己的缺点,由于基于可见光成像系统采集图像,当能见度极差时(比如大雾或者暴风雪),系统便无法工作,不过此时BLIS系统也会对驾驶者有相应提示。同时,如果你确认安全(或者是通过集市这样非常拥挤的路段),也可以手动关闭BLIS系统。
● 奥迪侧向辅助系统(Audi Side Assist) 国产奥迪A4L、A6L和Q5的部分车型同样装备了类似BLIS的盲区提示系统,奥迪称之为侧向辅助系统。如果车辆时速超过60公里/小时,奥迪侧向辅助系统(Audi Side Assist)就会介入。依靠传感器的帮助,奥迪侧向辅助系统可以探测到侧后方最远50米处的车辆,若此时并线有潜在危险,后视镜上就会亮起警示灯。如果驾驶者在警示灯亮了之后仍打转向灯,警示灯会增加亮度并开始闪烁。在城市行驶时,这套系统确实很有帮助,能够提醒你注意后方的车辆以免发生危险,对于新手的行车安全尤其有帮助。
【CN110059574A】一种车辆盲区检测方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910224413.0 (22)申请日 2019.03.23 (71)申请人 浙江交通职业技术学院 地址 311100 浙江省杭州市余杭区良渚街 道莫干山路1515号 (72)发明人 唐锡军 周志国 管倩倩 叶忠杰 (74)专利代理机构 北京科家知识产权代理事务 所(普通合伙) 11427 代理人 陈娟 (51)Int.Cl. G06K 9/00(2006.01) G08G 1/16(2006.01) B60R 1/00(2006.01) (54)发明名称 一种车辆盲区检测方法 (57)摘要 本发明公开了一种车辆盲区检测方法,首 先,通过一设置在车辆上的障碍物检测系统,在 车辆处于易发生碰撞的行驶状况下,自动开启该 障碍物检测系统,自动识别车辆周围是否存在障 碍物,及其与车辆的位置关系、相互运动关系。该 车辆盲区检测方法可改善驾驶员对环境的辨别 能力,减少由于驾驶盲区造成的交通事故,从而 减少生命财产损失。权利要求书1页 说明书3页 附图1页CN 110059574 A 2019.07.26 C N 110059574 A
权 利 要 求 书1/1页CN 110059574 A 1.一种车辆盲区检测方法,其特征在于: 首先,通过一设置在车辆上的障碍物检测系统,在车辆处于易发生碰撞的行驶状况下,自动开启该障碍物检测系统,自动识别车辆周围是否存在障碍物,及其与车辆的位置关系、相互运动关系; 然后,障碍物预警系统根据障碍物检测系统获取的障碍物与车辆的位置关系、相互运动关系,及系统内部模型,自动判别障碍物是否会与当前驾驶车辆相碰撞,根据障碍物属性,及障碍物与与车辆的位置关系、相互运动关系评定危情等级,并计算当前危情下的安全行驶路径/方案,自动开启盲区图像系统,并在盲区图像显示系统中,标注出最佳安全行驶路径/方案。 2.根据权利要求1所述的车辆盲区检测方法,其特征在于:障碍物检测系统利用无线检测装置,确定车辆周围可移动障碍物和不可移动障碍物,并检测所驾驶车辆周边一定范围内其他障碍物与其位置关系和相互运动关系。 3.根据权利要求1所述的车辆盲区检测方法,其特征在于:障碍物预警系统包括一套预警模型、一组安全行驶路径/方案算法。 4.根据权利要求3所述的车辆盲区检测方法,其特征在于:安全行驶路径/方案算法根据确定的每个待判断障碍物与所驾驶车辆的位置关系和相互运动关系,计算在当前行驶状况下的最佳安全行驶路径/方案,并在盲区图像系统中标注。 5.根据权利要求1所述的车辆盲区检测方法,其特征在于:盲区图像系统包括一组图像获取装置、一组图像矫正算法、一组图像融合算法、一套图像显示系统。 6.根据权利要求1所述的车辆盲区检测方法,其特征在于:图像获取装置采用鱼眼摄像头获取图像,安装点位于在车辆周围必要位置,图像获取范围包括A柱盲区、后视镜盲区、倒车盲区、前方和侧方视野盲区、内轮差盲区,以保证在障碍物报警后,车辆驾驶员可以通过调取图像获悉险情详情。 7.根据权利要求6所述的车辆盲区检测方法,其特征在于:图像获取装置所提供图像由鱼眼摄像头所获得,并通过图像矫正算法,消除摄像机引起的图像畸变,以便于进行正确的图像拼接,其中,图像矫正算法是指将鱼眼图像上每个2D像素坐标点映射到3D球面点,然后投影到实际景物平面点,根据像素点径向距离与入射角角度的成像模型关系,来实现校正,成像模型采用正交投影模型。正交投影入射角与径向距离公式如下,r=f·sinα,α为光线入射角角度,r为鱼眼图像上鱼眼成像点到鱼眼中心的径向距离。 8.根据权利要求5所述的车辆盲区检测方法,其特征在于:图像矫正算法采用直接线性变换算法,通过在图像坐标系下提取四个顶点图像坐标,并同时在世界坐标系下测量四个点的距离值,从而得到了两种坐标系变换下的单应性矩阵,并利用单应性矩阵完成图像的矫正。 9.根据权利要求5所述的车辆盲区检测方法,其特征在于:图像融合算法采用加权平均法,利用重叠区域内的像素位置距离重合区域边缘的距离作为两幅融合图像的权值因子。 10.根据权利要求1所述的车辆盲区检测方法,其特征在于:图像显示系统,包括车载显示器,传感器,计算机处理器,通过将图像获取装置获取的图像经过图像算法计算后,在车载显示器中显示,为车辆驾驶员提供准确的车辆周边障碍物详情,并且可将安全行驶路径/方案算法获得的当前行驶状况下的最佳安全行驶路径/方案,在当前图像显示中标注。 2
汽车倒车报警器的设计
设计任务书 1、设计题目 汽车倒车报警器的设计 2、设计参数 设计要求: 自动实时分段显示距离并进行声音提示。 3、设计要求及工作量 三周内在设计教室中按要求完成各阶段任务及相应工作量。 设计工作量: 1)查阅资料,选择合适的设计方案。 2)设计完整硬件电路图,给出设计说明及相关电路参数的计算公式。 3)针对设计方案及硬件电路图,进行适当的误差分析。 4)根据以上内容撰写完整的课程设计报告。 设计进度安排: 1)查阅资料,优选方案(2天) 2)进入实验室,完成总体设计(4天) 3)完成硬件电路图,进行误差分析(5天) 4)撰写说明书,准备答辩(2天) 5)答辩(2天) 4、主要参考文献 [1]王雪文,张志勇.传感器原理及应用.北京:北京航空航天大学出版社,2004 [2] 王化祥,张淑英.传感器原理及应用(修订版).天津:天津大学出版社,1999 [3] 赵继文,何玉彬. 传感器与应用电路设计. 北京:科学出版社,2002 [4] 丁镇生. 传感器及传感技术应用.北京:电子工业出版社,2001 [5] 何希才. 传感器及应用电路.北京:电子工业出版社,2001
汽车倒车报警器的设计 摘要 本设计采用超声波测距,可用作汽车泊车安全辅助装置,能以声音和更为直观的LED 显示告知驾驶员汽车周围障碍物的情况,帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了泊车安全性。 本设计硬件部分主要由单片机控制电路、超声波发射电路、超声波接收电路、数码管显示电路、电源电路和报警电路组成。本设计由AT89C2051单片机控制时间计数,计算超声波自发射至接收的往返时间,利用超声波在空气中的传输速度,从而得到实测距离。该设计的电路设计合理简单、工作稳定、性能良好、检测速度快、计算简单、易于做到实时控制,并且在测量误差方面能够达到简单实用的要求。 关键词:传感器 AT89C2051 超声波汽车倒车报警 目录
家禽养殖无线监测系统
家禽养殖无线监测解决方案 一、需求概述: 随着社会的发展,粗放型养殖由于效益低、风险高、污染大,逐渐被现代化养殖取代。现代化养殖是指集科学养殖、智能养殖、集约养殖于一体的精细型化养殖,有着高产、优质、低耗、高效的特点。 现代化养殖需要现代化的信息平台做支撑,信立科技家禽养殖无线监测系统可以无线监测养殖舍区的温湿度、光照度、氧气、氨气、硫化氢、二氧化碳等气体浓度等环境参数、并可统计用水量、用电量、家禽重量等生产数,后台可以查看实时数据及曲线、实现预警报警并形成历史数据库,方便用户查询和统计分析,实现养殖智能化,打造全新的养殖管理理念,提升养殖场的产量与产值,让养殖户轻松成为一个十分给力的“饲养专家”。
二、方案设计 1、系统结构 信立科技的家禽养殖无线监测系统,是以自主研发的无线传感模块为核心,利用无线传感器网络技术搭建而成的。系统主要有分为三个层次: (1)采集层——通过各种传感器装置,现场采集压力、液位、温度、液体表面的气体浓度等参数,存储到无线数据采集装置; (2)传输层——无线数据采集装置将数据远程发送到无线管理装置,无线管理装置通过GPRS、TCP/IP、WiFi等方式,将数据上传到监控 中心; (3)应用层——监控中心的监控软件把数据解析出来,按照客户的要求显示在屏幕上。
2、技术特点 (1)直观 监控软件将远端数据显示在屏幕上。 并根据用户的要求,对数据进行存贮,制成各种报表、曲线图、趋势图、直方图、饼图等。
(2)响应及时 对于紧急事件,监控软件能实时提醒,通知人员赶赴现场。 (3)应用广泛 无线传感器支持电池供电,适合于因距离远或地形复杂的而导致无法布线的监测点,不存在监控盲点。 (4)便于安装、维护及扩展 无需布线,只需安装、上电、设置,简单几步即可完成监测布点。 (5)兼容性好
超声波传感器
目录 1 概述 (1) 2 超声波测距原理 (3) 2.1 超声波传感器介绍 (3) 2.2 超声波传感器的特性 (4) 2.3 超声波检测概述 (5) 2.3 超声波测距的原理及实现 (6) 3 单片机超声波测距的总体设计 (8) 3.1 超声波测距系统的总体方案 (8) 3.2 系统主要参数考虑 (10) 3.2.1 传感器的指向角θ (10) 3.2.2 测距仪的工作频率 (10) 3.2.3 声速 (11) 3.2.4 发射脉冲宽度 (11) 3.2.5测量盲区 (11) 4 单片机倒车防撞报警系统各组成单元设计 (13) 4.1 发射与接收电路的设计方案 (13) 4.2 显示报警单元方案设计 (22) 4.2.1 系统显示电路设计 (22) 4.2.2 系统报警电路设计 (24) 4.3 单片机复位电路 (25) 4.4 时钟电路 (26) 4.5 稳压电源 (26) 5 系统硬件及软件实现 (29) 1
5.1 单片机硬件介绍 (29) 5.1.1 单片机 AT89C51介绍 (29) 5.1.2 8155芯片介绍 (31) 5.1.3 74LS244芯片介绍 (32) 5.2 探头UCM介绍 (35) 5.2.1主程序 (37) 5.2.2显示子程序和蜂鸣报警子程序 (40) 结论 (43) 参考文献 (44) 2
摘要 随着社会经济的发展交通运输业日益兴旺,汽车的数量在大副攀升。交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞预警系统势在必行,超声波测距法是最常见的一种距离测距方法,本文介绍的就是利用超声波测距法设计的一种倒车防撞报警系统。 本文是基于AT89C51单片机倒车防撞系统的设计,主要利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞报警系统。该系统采用软、硬件结合的方法,具有模块化和多用化的特点。 论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统的总体构成。通过多种发射接收电路设计方案比较,得出了最佳设计方案,并对系统各个设计单元的原理进行了介绍。对组成各系统电路的芯片进行了介绍,并阐述了它们的工作原理。论文介绍了系统的软件结构,通过编程来实现系统功能。最后,通过对系统的误差分析,给出了系统的改进方案。 关键字:单片机超声波 AT89C51
汽车倒车防撞报警器的设计1综述
摘要 分析了汽车倒车防撞系统的基本设计原理以及目前国内外此类防撞系统存在的问题,较详细的介绍超声波测距系统以及根据该系统设计的原理、方法和步骤,研制的汽车倒车防撞报警器。这种报警器在汽车倒车过程中达到极限位置的时候,能自动检测车尾障碍物的距离并发出声光报警,提醒司机刹车。本设计利用超声波传感器进行信号的发射和接收,包括发射、接收以及报警电路三个部分。超声传感器的主要元件是采用压电元件锆钛化铅(一般称为RZT),具有很强的方向性。报警电路部分是利用声光报警器,将信号传递之后,可实现语音报警。本设计采用国内生产厂家的通用元件,成本低,性能可靠,有利于推广。 关键字:超声波;汽车倒车;防撞;报警器;传感器
1.系统方案设计 1.1 概述 随着社会经济的发展交通运输业日益兴旺,汽车的数量也在大幅攀升。交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞预警系统势在必行。 汽车倒车防撞测距报警器一般有四种:1嘀嘀声加闪光,2音乐声加闪光,3语音声加闪光,4倒车到危险距离时发出警报声的超声波倒车报警器,由于很多研究都采用的是特殊难购的专用元件,使其难以推广,本设计采用国内生产的通用元件,成本较低廉,本设计使其在整个倒车过程中自动测量车尾到最近障碍物的距离,在倒车到极限距离时会发出急促的警告声,提醒驾驶员注意刹车,如果和制动系统联系在一起也可以形成自动刹车。 (1) 预警时间不足 最大有效探测距离的问题,大多数倒车雷达的最大有效探测距离:墙面小于2.5m,行人0.6-1.2 m。实验知道一些驾驶员的习惯初始倒车速度3-12km/月,即0.83-3.3 m/s, 。现以平均1.5 m/s计算,倒车雷达发现目标仅有1.67 s,对行人只有0.4-0. 8 s。如此以来,等报警器报警后汽车再减速就很紧张,明显感到预警时间不足。 (2) 反映速度迟钝 多数成品倒车雷达的显示速度因为考虑到抗干扰等因素,显示更新的速度约0.2-0.4s,即在0.2-0.4s显示一次距离,根据以上的推断,从倒车雷达发现目标到发出警报如果需要3s秒,这时车已经行使了0.45s,这显然感到反应迟钝。 (3) 探测盲区问题 多数倒车雷达的超声波传感器为2-3个,单个传感器的水平探测角度约60-70 °,这样势必造成2-3个盲区,如图1,而增加传感器的个数不但增加成本,而且提高报警器的故障率。另外,由于等同与水平探测角度的垂直探测角 1
汽车防碰倒车撞报警系统设计
目录 摘要 (1) 目录 (1) 绪论 (3) 第一章汽车防撞报警系统设计简介 (4) 1.1 设计概要 (4) 1.1.1设计任务与要求 (4) 1.1.2研究方法 (4) 1.1.3解决的关键问题 (4) 1.2 汽车防撞报警系统设计的意义 (5) 第二章设计思路分析 (7) 2.1 系统总体方案 (7) 2.2 工作原理 (8) 2.3 控制器AT89C2051的功能特点 (8) 第三章系统硬件电路设计 (9) 3.1 系统硬件方案设计 (9) 3.2 遥控器控制框图 (10) 3.3 工作原理剖析 (11) 3.3.1传感器的选择 (11) 3.3.2超声波的发射与接收电路 (11) 3.3.3测速原理 (12) 3.4 实物设计所能达到的功能及操作说明 (12) 第四章系统软件电路设计 (14) 4.1 主程序 (14) 4.2 串口通信模块——transplant.C (15) 4.3 程序编写 (16) 第五章调试与测试 (18) 总结 (19)
参考文献 (20) 附录1 (20) 附录2 (22) 致谢 (25)
绪论 随着时代的发展及社会的进步,越来越多的汽车进入了普通人的家庭。汽车逐渐成为人们生活中不可缺少的一部分。 尽管公路条件在不断地改进,但仍然避免不了公路上汽车拥挤的现状,再加上设计车速不断提高,恶性交通事故无时无刻不在发生,给人们和社会带来了巨大的生命与财产损失。汽车防撞报警系统也因此应用而生。 汽车防撞报警系统是一种当汽车离障碍物较近时向司机预先发出报警信号的装置,通常系统的各个探测器安装于汽车的几个关键的车身部位,能探测到接近车身的行人、车辆和周围的障碍物,能向司机或乘客提前发出即将发生撞车危险的信号,促使司机甚至撇开司机采取应急措施处理特殊险情,避免损失。同时当汽车发生故障时,可以通过按动警示信号键向过往的车辆发送无线警示信号,提醒过往车辆的司机注意,从而更有效地避免交通事故的发生。汽车的各种方便性正不断地被人们所接受,现如今如同是一般的家用电器一样地进入平常百姓的家中,开发本系统,可以广泛地安装于各种家用轿车、客车、货车等,如与车载微型电脑相配合,可以实现更多的人工智能化操作,是实现汽车无人驾驶必不可少的一个组成部分,也是未来汽车的发展方向,因此运用前景是相当可观。 本设计采用了以AT89C52为主控芯片,利用三极管的开关特性驱动T40—16(40kHz 超声波发射端子)发射40kHz方波,然后接收端子R40—16接收信号,经放大电路及后级处理后单片机接收到一个下降沿中断,对信号传输期间所计数据进行处理后实现LED显示障碍物与汽车发射端的距离。本文重点介绍了三极管的开关特性,发射端与接收端的压电效应,检波整流电路以及运放的简单应用。经过实际验证,在车体上合理布置该报警器,利用超声波测量汽车与障碍物距离,实现汽车前行和倒车时与障碍物之间距离的检测;通过LED点阵实时显示距离,使汽车避免和障碍物发生碰撞。实验表明该汽车防撞报警器具有测距速度快、准确度高、易于实现等优点,具有很好的应用前景。而且本设计的应用领域也将十分广泛,不仅可以在汽车工业中运用,当配上相应执行机构,还可以运用于工业机床的限位自动控制当中。
自动驾驶材料搜集整理
沃尔沃自动驾驶技术研发取得新进展 2013年06月04日 13:36:09 来源:新华汽车 设想一下,当你启动汽车,加入到彼此相距不过数米的汽车队列中。几分钟后,你的双手就可以离开方向盘,看看杂志、接打电话或者看会儿电视,而你的汽车正在安全省油地自动行驶。这种只能在科幻电影里才能见到的场景,未来将成为现实。 近年来,作为全世界最安全汽车的制造厂商,沃尔沃汽车在主动安全技术研发领域不断创新,相继推出了城市安全系统、自适应巡航控制系统和行人探测系统等科技,不断向“零伤亡”目标迈进。而沃尔沃下一步战略则是在自动驾驶汽车领域加强研发,成为该领域的领导品牌。 自动驾驶领域潜力巨大 日前,沃尔沃汽车公司调查了消费者对于自动驾驶车型的态度。研究显示,几乎半数的被调查者都愿意使用自驾驶车型;在年龄从18岁到37岁的驾驶员中,近半数的人肯定或可能购买完全自动驾驶车型。自动驾驶技术可以为驾驶员提供更多自由,在确保安全的情况下,车辆的自动驾驶技术可使驾驶员自由接打电话、发送短信或进行阅读。 沃尔沃汽车公司驾驶员辅助技术负责人和产品特性经理Marcus Rothoff表示,“我们的目标是通过超乎常规的理念和先进技术,在自驾驶领域获得领先地位。确保自驾驶技术在公共道路上的可靠使用,从而提升顾客对自驾驶车型的信心。” 自动驾驶车型优势众多 自动驾驶车型除了1.能够解放驾驶员以外,还有诸多无可比拟的优势。不仅能够2.减少50%的油耗,还可以通过3.改善交通流量,缩短行驶时间。而且通过搭配城市安全系统、行人探测系统、自适应巡航控制系统等科技,还有可能4.实现零事故和零伤亡。 5.减轻空气污染
“在实现无事故愿景的过程中,车辆的自动反应非常重要。我们目前的自动制动、车道保持辅助和自适应巡航控制系统可以成为实现自驾驶的第一步。现在,我们正在逐步提升正常驾驶情况下的自驾驶程度,” Marcus Rothoff说。 环保型道路安全列队行车(SARTRE)项目研究完成 欧洲环保型道路安全列队行车(SARTRE)项目重点研究在传统高速公路上实施道路列队行车(Road Train)的可行性,即在存在其它道路使用者的情况下,如何实现列队交通,并在长距离列队行车驾驶过程中解放驾驶员的可能性,目前该项目已成功结束。 沃尔沃是参与该项目的唯一汽车制造商。经过沃尔沃汽车公司以及其他合作伙伴的努力,SARTRE项目的研究非常成功。测试车队包括一辆由驾驶员操控的领头卡车,后面跟随一辆卡车和三辆沃尔沃轿车(S60、V60和XC60)。在行驶速度不超过90公里/小时的情况下,各车之间的距离不超过4米。“基本原则是后车重复领头车的动作,”沃尔沃汽车公司技术专家Erik Coelingh说,“为了实现这一目标,我们扩展了当前安全和支持系统中使用的摄像机、雷达和激光技术,包括自适应巡航控制系统、城市安全系统、车道保持辅助系统、盲点监测系统和停车辅助等先进技术。” 除了解放驾驶员以外,SARTRE的研究还能为驾驶者带来诸多益处。根据车间距和车辆的大小,该项目能够为车主节约10%-20%的燃油消耗,在长时间行驶后效果是十分明显的。同时,由于行车过程由系统智能执行,避免了由于驾驶者疲劳等因素所产生的安全隐患,提供交通安全。沃尔沃汽车本身所搭载的先进通信技术,能够使车队中的各车之间互动非常迅速。另外,对于交通拥堵的状况也有很好的改善。由于车速变换的减少,使道路使用效率得到提升,从而让交通更加流畅。
超声波传感器在汽车倒车系统中的应用
超声波传感器在汽车倒车系统中的应用 近年来随着微电子技术发展而产生的小型价廉的微处理器(单片机)的出现,使超声波测距传感器的功能得到了提升。有了微处理器不仅使测距的精度大为提高,而且为超声波测距技术的应用开辟更大的空间。 超声波测距的工作原理 人能听到的声音频率为:20Hz~20kHz,即为可听声波,超出此频率范围的声音,即20Hz以下的声音称为低频声波,20kHz以上的声音称为超声波。超声波是一种只有少数生物(如蝙蝠、海豚)才能感觉的机械波,其频率在20kHz以上,波长短,绕射小、能定向传播。超声波为直线传播方式,频率越高,绕射能力越弱,但反射能力越强。为此,利用超声波的这种性能就可制成超声波传感器。 超声波测距的原理就是利用超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。 构成超声测距系统的电路功能模块包括发射电路、接收电路、键盘显示电路、核心功能模块单片机控制器及一些辅助电路。采取收发分离方式有两个好处:一是收发信号不会混叠,接收探头所接收到的纯为反射信号;二是将接收探头放置在合适位置,可以避免超声波在物体表面反射时造成的各种损失和干扰,提高系统的可靠性。 根据设计要求并综合各方面因素,选择了西安立宇电子科技有限公司的超声波测距传感器TCT40-16T/R(T 表示发射传感器,R表示接收传感器),最大探测距离为6m,发射扩散角为60度。同时,采用AT89C51单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距器的系统框图如下图1所示。 超声波发射电路原理图如图2所示:由NE555 时基电路及外围元件构成40kHZ 多谐振荡器电路,调节电阻器RP 阻值,可以改变振荡频率,最终达到40KHZ。同时用单片机控制NE555 第3 脚输出端驱动超声波换能器T40-16,使之发射出超声波信号。电路简单易制。电路工作电压9V,工作电流40~50mA。