机械振动基础实验
机械振动理论基础及其应用
旋转机械振动与故障诊断研究综述1.前言工业生产离不开回转机械,随着装置规模不断扩大,越来越多的高速回转机械应用于工业生产,诸如高速离心压缩机、汽轮机发电机组。
动态失稳造成的重大恶性事故屡见不鲜。
急剧上升的振动可在几十秒之内造成机组解体,甚至祸及厂房,造成巨大的经济损失和人员伤亡。
此外,机械振动可能降低设备机械性能,加速机械零部件的磨损,发出的噪声损害操作者的健康。
但是振动也能合理运用,如工业上常用的振动筛、振动破碎等都是振动的有效利用。
工程技术人员必须认真对待机械振动问题,当机组产生有害的振动时,及时分析原因,坚持用合理的振动测试标准,采取科学的防治措施。
2.旋转机械振动标准●旋转机械分类:Ⅰ类:为固定的小机器或固定在整机上的小电机,功率小于15KW。
Ⅱ类:为没有专用基础的中型机器,功率为15~75KW。
刚性安装在专用基础上功率小于300KW的机器。
Ⅲ类:为刚性或重型基础上的大型旋转机械,如透平发电机组。
Ⅳ类:为轻型结构基础上的大型旋转机械,如透平发电机组。
●机械振动评价等级:好:振动在良好限值以下,认为振动状态良好。
满意:振动在良好限值和报警值之间,认为机组振动状态是可接受的(合格),可长期运行。
不满意:振动在报警限值和停机限值之间,机组可短期运行,但必须加强监测并采取措施。
不允许:振动超过停机限值,应立即停机。
3.振动产生的原因旋转机械振动的产生主要有以下四个方面原因,转子不平衡,共振,转子不对中和机械故障。
4.旋转机械振动故障诊断4.1转子不平衡振动的故障特征当发生不平衡振动时,其故障特征主要表现在如下方面:1 )不平衡故障主要引起转子或轴承径向振动,在转子径向测点上得到的频谱图, 转速频率成分具有突出的峰值。
2 )单纯的不平衡振动,转速频率的高次谐波幅值很低,因此在时域上的波形是一个正弦波。
3 )转子振幅对转速变化很敏感,转速下降,振幅将明显下降。
4 )转子的轴心轨迹基本上为一个圆或椭圆,这意味着置于转轴同一截面上相互垂直的两个探头,其信号相位差接近90°。
机械振动基础作业(有答案-全版)
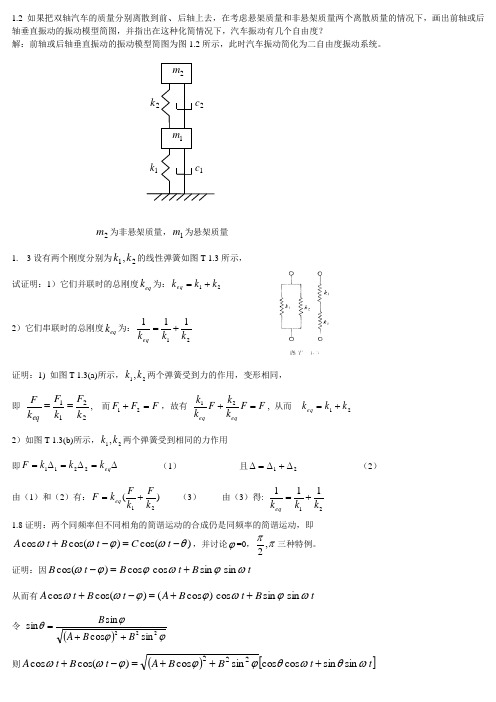
1.2 如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?解:前轴或后轴垂直振动的振动模型简图为图1.2所示,此时汽车振动简化为二自由度振动系统。
2m 为非悬架质量,1m 为悬架质量1. 3设有两个刚度分别为21,k k 的线性弹簧如图T-1.3所示, 试证明:1)它们并联时的总刚度eq k 为:21k k k eq +=2)它们串联时的总刚度eq k 为:21111k k k eq +=证明:1) 如图T-1.3(a)所示,21,k k 两个弹簧受到力的作用,变形相同, 即2211k F k F k F eq ==, 而F F F =+21,故有 F F k kF k k eq eq =+21, 从而 21k k k eq +=2)如图T-1.3(b)所示,21,k k 两个弹簧受到相同的力作用 即∆=∆=∆=eq k k k F 2211 (1)且21∆+∆=∆ (2)由(1)和(2)有:)(21k Fk F k F eq += (3) 由(3)得:21111k k k eq += 1.8证明:两个同频率但不同相角的简谐运动的合成仍是同频率的简谐运动,即)cos()cos(cos θωϕωω-=-+t C t B t A ,并讨论ϕ=0,ππ,2三种特例。
证明:因t B t B t B ωϕωϕϕωsin sin cos cos )cos(+=-从而有t B t B A t B t A ωϕωϕϕωωsin sin cos )cos ()cos(cos ++=-+令 ()ϕϕϕθ222sin cos sin sin B B A B ++=则()[]t t B B A t B t A ωθωθϕϕϕωωsin sin cos cos sin cos )cos(cos 222+++=-+=())cos(sin cos 222θωϕϕ-++t B B A令C=()ϕϕ222sin cos B B A ++,则有 )cos()cos(cos θωϕωω-=-+t C t B t A当ϕ=0时,C=A+B ;当ϕ=2π时,22B A C +=,22BA arcsin +=B θ ;当ϕ=π时,B A -=C ,0=θ1.13汽车悬架减振器机械式常规性能试验台,其结构形式之一如图T-1.13所示。
1-《机械振动基础》大作业,基于matlab的多自由度振动讲解(20200501064418)
(2016 年春季学期)
题目 多自由度振动系统的固有频率和固有阵型
姓
名
学
号
班
级
专
业
报告提交日期
哈尔滨工业大学
《机械振动基础》大作业
报告要求
1. 请根据课堂布置的 2 道大作业题,任选其一,拒绝雷同和抄袭; 2. 报告最好包含自己的心得、体会或意见、建议等; 3. 报告统一用该模板撰写,字数不少于 3000 字,上限不限; 4. 正文格式: 小四号 字体,行距为 1.25 倍行距; 5. 用 A4 纸单面打印 ;左侧装订, 1 枚钉; 6. 课程报告需同时提交打印稿和电子文档予以存档,电子文档由班
在学习本章节的时候,就有一个问题出现,多自由度的系统离我们很遥远, 至少实在数学计算中, 一个复杂的两自由度系统就需要用公式推导一段时间, 才 能得出相应的参数 (运动的微分方程和相关的固有频率) ,期间需要列出功和能 的方程、求导以及化简等步骤。到后来学习到多自由度系统时,就会发现,开式 我们对多自由度系统的学习也只是没有找到方法而已, 在引入新的方法后, 替代 了原有的直接法列方程, 对我们有了很大的帮助, 就拿刚度、 柔度计算发来说就 它们的规律而言, 就要比直接法快的很多。 所谓直接法, 就是直接应用动力学的 基本定律或定理 (例如牛顿第二定律或达朗伯原理) 建立系统运动微分方程的方
2.对 matlab 的学习和认识
MATLAB 是 matrix&laboratory 两个词的组合,意为矩阵工厂(矩阵实验
室)。是由美国 mathworks 公司发布的主要面对科学计算、可视化以及交互式
程序设计的高科技计算环境。 MATLAB 是一种用于算法开发、数据可视化、数 据分析以及数值计算的高级技术计算语言和交互式环境。 除了矩阵运算、 绘制函
机械基础实验报告

机械基础实验报告一、实验目的。
本实验旨在通过实际操作,加深学生对机械基础知识的理解,培养学生动手能力和实验技能,提高学生的实际动手操作能力。
二、实验仪器与设备。
1. 实验台。
2. 螺杆。
3. 螺母。
4. 力传感器。
5. 数据采集系统。
三、实验原理。
本实验主要通过螺杆的力学原理,探究力的传递和变换规律。
当给螺杆施加一个力F1,螺杆将产生一个力F2,通过力传感器和数据采集系统可以获得F1和F2的数值,从而计算出螺杆的力传递和变换规律。
四、实验步骤。
1. 将螺杆和螺母安装在实验台上,保证螺杆和螺母之间的配合间隙适当。
2. 连接力传感器和数据采集系统,确保连接正确并稳固。
3. 施加一个力F1到螺杆上,记录下力传感器显示的数值。
4. 根据实验数据计算出螺杆产生的力F2,并进行比较分析。
五、实验数据与分析。
通过实验数据采集系统获得的数据,我们可以计算出螺杆产生的力F2与施加的力F1之间的关系。
通过分析这些数据,我们可以得出螺杆的力传递和变换规律,从而加深对力学原理的理解。
六、实验结果与结论。
根据实验数据和分析结果,我们得出了螺杆的力传递和变换规律。
实验结果表明,在螺杆和螺母的配合下,施加在螺杆上的力F1能够产生一个力F2,且F2与F1之间存在一定的比例关系。
这一结论对于机械传动和力学原理的理解具有重要意义。
七、实验心得体会。
通过本次实验,我深刻体会到了理论知识与实际操作的结合的重要性。
只有通过实际操作,我们才能更加深入地理解和掌握理论知识,培养动手能力和实验技能,提高实际动手操作能力。
同时,本次实验也让我对机械基础知识有了更加深刻的理解,为我今后的学习和工作打下了坚实的基础。
八、参考文献。
1. 《机械基础》,XXX,XXX出版社,20XX年。
2. 《力学原理》,XXX,XXX出版社,20XX年。
以上就是本次机械基础实验的实验报告,希望能对大家有所帮助。
感谢大家的阅读!。
机械振动基础
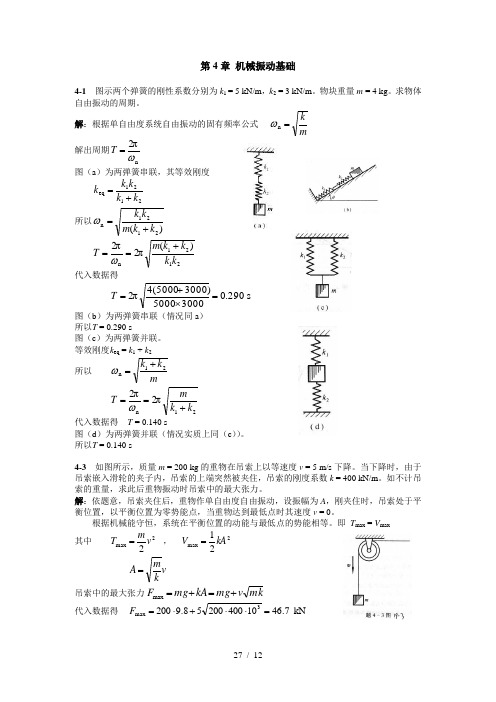
第4章 机械振动基础4-1 图示两个弹簧的刚性系数分别为k 1 = 5 kN/m ,k 2 = 3 kN/m 。
物块重量m = 4 kg 。
求物体自由振动的周期。
解:根据单自由度系统自由振动的固有频率公式 mk =n ω 解出周期 nπ2ω=T图(a )为两弹簧串联,其等效刚度 2121eq k k k k k +=所以 )(2121n k k m k k +=ω2121n)(π2π2k k k k m T +==ω代入数据得s 290.0300050003000)4(5000π2=⨯+=T图(b )为两弹簧串联(情况同a ) 所以 T = 0.290 s图(c )为两弹簧并联。
等效刚度 k eq = k 1 + k 2 所以 mk k 21n +=ω21nπ2π2k k mT +==ω代入数据得 T = 0.140 s图(d )为两弹簧并联(情况实质上同(c ))。
所以 T = 0.140 s4-3 如图所示,质量m = 200 kg 的重物在吊索上以等速度v = 5 m/s 下降。
当下降时,由于吊索嵌入滑轮的夹子内,吊索的上端突然被夹住,吊索的刚度系数k = 400 kN/m 。
如不计吊索的重量,求此后重物振动时吊索中的最大张力。
解:依题意,吊索夹住后,重物作单自由度自由振动,设振幅为A ,刚夹住时,吊索处于平衡位置,以平衡位置为零势能点,当重物达到最低点时其速度v = 0。
根据机械能守恒,系统在平衡位置的动能与最低点的势能相等。
即 T max = V max 其中 2max 2v m T = , 2max 21kA V =v km A =吊索中的最大张力 mk v mg kA mg F +=+=max 代入数据得 kN 7.461040020058.92003max =⋅⋅+⋅=F4-5 质量为m 的小车在斜面上自高度h 处滑下,而与缓冲器相碰,如图所示。
缓冲弹簧的刚性系数为k ,斜面倾角为θ。
机械振动实验指导书

机械振动实验指导书基础与实验教学中心机械与动力工程学院上海交通大学目录安全注意事项 ....................................... 错误!未定义书签。
实验预备知识 DHVTC振动测试与控制实验系统组成与使用方法错误!未定义书签。
实验一振动系统固有频率的测量 ..................... 错误!未定义书签。
实验二无阻尼单自由度系统强迫振动特性的测量 . (11)实验三有、无阻尼单自由度系统自由衰减的测量 (16)实验四拍振实验 (20)实验五三自由度系统各阶固有频率及主振型的测量 (25)实验六动力吸振器吸振实验 (28)实验七悬臂梁模态测试 (32)实验八被动隔振实验 (35)实验安全注意事项本实验系统尽管在设计、加工和安装时已充分考虑了安全方面的问题,但强烈建议学生使用时注意如下事项:一、通电前仔细检查各活动机械部分,如激振器、偏心电机等的连接紧固情况,确保所有螺栓、卡扣等紧固无误,避免激振或旋转。
二、查看传感器、信号源、激振器等连线正确无误,确保各仪器正常工作。
三、检查各仪器电源线是否插紧插好,各仪器是否可靠接地,以防触电。
四、调压器应放置于桌面宽敞处,尽可能远离其它仪器,并且在使用时只有经检查无误后才能通电,通电前须仔细检查电机偏心轮是否紧固、调压器与电机连线、接地是否可靠,使用完毕应立即断电。
五、激振器和偏心电机工作时,禁止手或是其它物品碰到激振器顶杆和电机偏心轮,以免受伤或物品飞落。
六、所有仪器设备工作过程中发现异常应立即断电,并请专业人员检查维修。
实验预备知识: DHVTC振动测试与控制实验系统组成与使用方法一、DHVTC振动测试与控制学生实验系统的组成如图1-1所示,本系统由“振动测试与控制实验台”、“激振与测振系统”、“动态采集分析系统”组成。
⑴——底座⑸——非接触式激振器⑼——电式速度传感器⒀——单/双自由度系统⑵——支座⑹——接触式激振器⑽——被动隔振系统⒁——压电式加速度传感器⑶——三自由度系统⑺——力传感器⑾——简支梁/悬臂梁⒂——电涡流位移传感器⑷——薄壁圆板⑻——偏心电机⑿——主动隔振系统⒃——磁性表座图1-1 DHVTC振动测试与控制学生实验系统示意图1.1 振动与控制实验台振动测试与控制实验台由弹性体系统(包括简支梁、悬臂梁、薄壁圆板、单双自由度系统、三自由度系统模型)组成,配以主动隔振、被动隔振用的空气阻尼减震器、动力吸振器等,可完成振动与振动控制等20多个实验项目。
机械振动基础实验指导书.
机械振动基础实验实验指导书湖南工程学院机械工程学院2010.3目录振动教学实验系统组成及基本测试仪器的使用 (2)实验一用“双踪示波比较法”测量简谐振动的频率 (11)一、实验目的 (11)二、实验仪器及安装示意图 (11)三、实验原理 (11)四、实验方法及步骤 (12)五、实验结果与分析 (13)实验二简谐振动的振幅的测量 (14)一、实验目的 (14)二、实验仪器及安装示意图 (14)三、实验原理 (14)四、实验方法及步骤 (15)五、实验结果与分析 (15)实验三机械振动系统固有频率测量 (16)一、实验目的 (16)二、实验仪器及安装示意图 (16)三、实验原理 (16)四、实验方法及步骤 (19)五、实验结果与分析 (19)实验四单自由度系统有阻尼受迫振动 (20)一、实验目的 (20)二、实验仪器及安装示意图 (20)三、实验原理 (20)四、实验方法及步骤 (22)五、实验结果与分析 (22)振动教学实验系统组成及基本测试仪器的使用INV1601型振动教学实验系统是一套集成化的振动测试实验系统,主要由三部分组成:1、INV1601T型振动教学实验台(以下简称INV1601T实验台)2、INV1601B型振动教学实验仪(以下简称INV1601B实验仪)及各种传感器3、INV1601型DASP振动教学实验软件(以下简称INV1601型DASP软件)INV1601型振动教学实验系统方框图如下所示:1.INV1601T型振动教学实验台该振动教学实验台主要由弹性体系统、激振系统、隔振系统、阻尼和动力吸振器组成。
弹性体系统包括简支梁、悬臂梁、等强度梁、圆板以及用于组成单自由度、二自由度和多自由度系统模型的质量块和钢丝。
激振系统包括偏心电机激振、接触式激振器、非接触式激振器。
隔振系统采用空气阻尼器进行隔振。
阻尼采用的是油阻尼器。
动力吸振采用的是可拆卸式复式吸振器,同时可以减小四个共振频率。
以下对实验台的一些主要部件作详细说明。
机械振动实验报告
机械振动实验报告1. 实验目的本实验旨在通过对机械振动的实验研究,掌握机械振动的基本原理和特性,深入了解振动系统的参数对振动现象的影响。
2. 实验原理(1)简谐振动:当物体在受到外力作用下,沿着某一方向做来回运动时,称为简谐振动。
其数学表达式为x(t) = A*sin(ωt + φ),其中A 为振幅,ω为角频率,φ为初相位。
(2)受迫振动:在外力的作用下振动的振幅不断受到调节,导致振幅和相位角与外力作用间存在一定的关联关系。
(3)自由振动:在无外力作用下,振动系统的振幅呈指数幅度减小的振动现象。
3. 实验内容(1)测量弹簧振子的简谐振动周期并绘制振幅-周期曲线。
(2)通过改变绳长和质量对受迫振动的谐振频率进行测量。
(3)观察受外力激励时的自由振动现象。
4. 实验数据与结果(1)弹簧振子简谐振动周期测量结果如下:振幅(cm)周期(s)0.5 0.81.0 1.21.5 1.62.0 1.9(2)受迫振动的谐振频率测量结果如下:绳长(m)质量(kg)谐振频率(Hz)0.5 0.1 2.50.6 0.2 2.00.7 0.3 1.80.8 0.4 1.5(3)外力激励下的自由振动现象结果呈现出振幅逐渐减小的趋势。
5. 实验分析通过实验数据处理和结果分析,可以得出以下结论:(1)弹簧振子的振动周期与振幅呈线性关系,在一定范围内,振幅增大,周期相应增多。
(2)受迫振动的谐振频率随绳长和质量的增加而减小,表明振动系统的参数对谐振频率有一定的影响。
(3)外力激励下的自由振动现象符合指数幅度减小的规律,振幅随时间的增长呈现递减趋势。
6. 实验总结本实验通过测量和观察机械振动的不同现象,探究了振动系统的基本原理和特性。
实验结果表明振动系统的参数对振动现象产生了明显的影响,为进一步深入研究振动学提供了基础。
通过本次实验,我对机械振动的原理和特性有了更深入的了解,对实验数据处理和分析方法也有了更加熟练的掌握。
希望通过不断的实验学习,能够进一步提升自己对振动学理论的理解水平,为未来的科研工作打下坚实基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械振动基础实验实验指导书湖南工程学院机械工程学院2012.9目录振动教学实验系统组成及基本测试仪器的使用 (2)实验一用“双踪示波比较法”测量简谐振动的频率 (11)一、实验目的 (11)二、实验仪器及安装示意图 (11)三、实验原理 (11)四、实验方法及步骤 (12)五、实验结果与分析 (13)实验二简谐振动的振幅的测量 (14)一、实验目的 (14)二、实验仪器及安装示意图 (14)三、实验原理 (14)四、实验方法及步骤 (15)五、实验结果与分析 (15)实验三机械振动系统固有频率测量 (16)一、实验目的 (16)二、实验仪器及安装示意图 (16)三、实验原理 (16)四、实验方法及步骤 (19)五、实验结果与分析 (19)实验四单自由度系统有阻尼受迫振动 (20)一、实验目的 (20)二、实验仪器及安装示意图 (20)三、实验原理 (20)四、实验方法及步骤 (22)五、实验结果与分析 (22)振动教学实验系统组成及基本测试仪器的使用INV1601型振动教学实验系统是一套集成化的振动测试实验系统,主要由三部分组成:1、INV1601T型振动教学实验台(以下简称INV1601T实验台)2、INV1601B型振动教学实验仪(以下简称INV1601B实验仪)及各种传感器3、INV1601型DASP振动教学实验软件(以下简称INV1601型DASP软件)INV1601型振动教学实验系统方框图如下所示:1.INV1601T型振动教学实验台该振动教学实验台主要由弹性体系统、激振系统、隔振系统、阻尼和动力吸振器组成。
弹性体系统包括简支梁、悬臂梁、等强度梁、圆板以及用于组成单自由度、二自由度和多自由度系统模型的质量块和钢丝。
激振系统包括偏心电机激振、接触式激振器、非接触式激振器。
隔振系统采用空气阻尼器进行隔振。
阻尼采用的是油阻尼器。
动力吸振采用的是可拆卸式复式吸振器,同时可以减小四个共振频率。
以下对实验台的一些主要部件作详细说明。
1)偏心电动机和调压器单相交流串激整流式电动机带动偏心质量圆盘转动,偏心质量的离心惯性力产生振动。
电动机采用50Hz单相电源供电,其转速随负载或电源电压的变化而变化。
通过调压器改变电压的方法来调节电动机的转速,使电动机转速可在0~4000转/分的范围内调节。
产生不同频率的激振力。
2)JZ-1型电磁式激振器使用这种激振器时,是将它放置在相对于被测试物体静止的台面上,并将顶杆顶在被测试物体的激振处,顶杆端部与被测试物体之间要有一定的预压力,使顶杆处于限幅器中间。
激振前顶杆应处于振动的平衡位置。
这样激振器的可动部分和固定部分才不发生相应的碰撞。
与电磁式激振器配套使用的仪器有信号发生器、功率放大器和直流稳压电源。
(磁场采用永久磁铁产生时,激振器不需要直流电源。
)信号发生器是产生一定形式、一定频率范围和-定大小振动信号的设备,并向多功能形式发展,即同一信号发生器可产生多种振动信号,如正弦、脉冲、随机和瞬态随机等多种激振信号。
功率放大器是将信号发生器输出的电压信号进行放大,给激振器提供与电压信号成正比的电流,以使电磁式激振器产生符合要求的激振力。
电磁式激振器的优点是能获得较宽频带的激振力,即产生激振力的频率范围较宽。
而可动部分质量较小,从而对被测物体的附加质量和附加刚度较小,使用也方便。
因此,应用比较广泛,但这种激振器的缺点是不能产生太大的激振力。
①技术指标:激振动频率范围:10Hz - 1000Hz最大激振力:200g最大行程:±1.5mm②使用方法:将激振器安装支架固定在实验台基座上,把激振器安装在支架上,并保证激振器顶杆对简支梁有一定的预压力(不要露出激振杆上的红线标识),用专用连接线连接激振器和INV1601B型振动教学实验仪的功放输出接口。
3)INV型磁电式非接触式激振器对于轻型结构、刚度很弱(如薄板)的试件,以能激起试件振动为前提,采用非接触式激振器激振为好。
非接触式激振器主要由磁铁和绕在铁心上的线圈组成。
线圈有两个,一个叫励磁线圈,它通以直流电流,产生恒定的偏置磁场;另一个为驱动线圈,它由外部信号源供给激励信号,当驱动线圈通以交变电流时,磁铁对试件就产生交变的吸力,从而激起试件的振动。
①技术指标:激振力频率范围:10Hz - 1000Hz最大激振力:100g②使用方法:将激振器安装在磁力表座上,根据被激振件的刚度调节激振器与被激振件的间隙。
在做实验时,还要根据被激振件的各阶固有频率随时调节激振器与被激振件的间隙。
激振器连线接到INV1601B型振动教学实验放大仪的功放输出接口。
2.INV1601B型振动教学实验仪性能及各种传感器INV1601B型振动教学实验仪由双通道多功能振动测试仪、扫频信号发生器、功率放大器组成,并集成了数据采集器,可连接压电式加速度传感器、磁电式速度传感器和电涡流传感器,对被测物体的振动加速度、速度和位移进行测量。
可将每个通道所测振动信号转换成与之相对应的0~5VAC电压信号输出,供计算机使用。
扫频信号发生器的输出频率在手动档时,可通过旋钮在0.1~1000Hz范围内连续调节;在自动档时,可从10到1000Hz自动变换,扫频时间可由电位器控制,3s~240s连续可调,激振频率可由液晶显示器显示。
功率放大器可直接与JZ-1型激振器或JZF-1非接触式激振器连接,对物体进行激振,其输出幅度可连续调节。
2.1 使用说明2.1.1 “设置选择及参数选择”旋钮的意义及使用:该旋钮是一个复用钮,既能旋转也可推压。
当左右旋转时,上方的5个指示灯依次点亮。
分别进入“1道”、“2道”、“显示”、“方式”、“扫频”等5个设置状态。
使用推压功能时,则分别进入“1道”、“2道”、“显示”、“方式”、“扫频”5个设置状态的下一级子菜单。
“1道”、“2道”灯亮:表示参数选择进入对1通道或2通道的设置状态。
此时,通过推压该旋钮可以选择加速度计,速度计或位移计测量。
其中,选择加速度计及速度计测量时,通过内部的微积分电路又可分别选择测量加速度,速度或位移。
推压该旋钮时,对应档的灯会点亮。
“显示”灯亮:推压该旋钮时,“Hz”、“mA”、“s”,灯循回点亮,分别表示显示窗内显示的为信号源(即功放)的频率,功放的负载电流或自动扫频时的扫频周期(秒),扫描周期可在3~240秒范围内连续可调。
“方式”灯亮:推压该旋钮时,可选择方式框内“恒压”、“恒流”两方式。
实际上,通过“功率幅度调节”电位器,可随时调节输出功率的大小。
“恒压”、“恒流”方式的意义是:当“功率幅度调节”电位器不动时,用手动或自动方式改变频率,使功率负载上的电流或电压保持恒定。
当功放工作在恒压状态时,采用电压负反馈。
这样,在振动信号的频率发生变化时,功率负载上的电压是恒定的。
在恒流状态时,采用电流负反馈。
当频率变化时,通过功率负载上的电流是恒定的。
这一点很有意义。
因为激振器上输出力的大小,是和流经激振器内线圈中的电流大小成正比的。
也就是说,当频率变化时,只要驱动激振器的电流恒定,那么,激振力也恒定。
根据f=ma,当质量m不变时,只要激振力f保持恒定,那么,加速度也保持恒定。
这样,就可实现恒加速度扫频。
“扫频”灯亮:推压该旋钮时,可选择扫频框内“手动”、“自动”两种方式。
2.1.2 “频率周期及步进”旋钮的意义及使用:该旋钮也是一个复用钮,既能旋转也可推压。
旋转该钮时,可以改变手动扫频时的频率或自动扫频时的扫频周期。
注意:这时,只有在“设置选择及参数选择”旋钮设置在“显示”状态时才可以在面板表头上看到变化的频率或周期值。
推压该钮时,步进值会依次从个位变化到十位,再到百位。
选中的数码管会不断闪动。
步进值在哪位闪动,频率或周期的变化从哪位开始。
注意:该钮还有一个锁定功能。
当持续按压该钮3秒钟,机内的蜂鸣器发出连续两声嘀嘀声,表示锁定功能有效。
这时,“设置选择及参数选择”及“频率周期及步进”两旋钮被锁定。
再持续按压该钮3秒钟,机内的蜂鸣器发出连续两声嘀嘀声,表示解锁成功。
2.2.3 “功率幅度调节”旋钮调整输出功率的大小注意:1. 每次使用完毕,一定要将该旋钮拧到最小。
下次使用时再慢慢拧大。
否则,开机瞬间的巨大冲击,可能会损坏仪器或激振器。
2. 该机的负载是专用的JZ-1型激振器,负载的动圈电阻约10Ω。
3. 功率输出的两根线均是对地浮动的,不能将任意哪根线对地短路。
2.2 模拟输出电压转换成振动工程单位的方法两个测量通道是相同的。
可分别接入加速度传感器,速度传感器及涡流传感器。
测量通道输出的是模拟电压信号,当需要获取振动的工程单位时,需要输入相应的传感器的灵敏度。
当使用加速度传感器时,需要输入加速度计的电荷灵敏度,单位是:pc/m·s-2。
当使用速度传感器时,需要输入速度计的电压灵敏度,单位是:V/mm·s-1。
当使用涡流传感器时,需要输入涡流传感器的电压灵敏度,单位是:mV/μm。
传感器灵敏度为K(如果是电荷型传感器,其灵敏度单位为PC/U,表示每个工程单位CH输出多少PC的电荷,对于压电式力传感器,而且参数表中工程单位设为牛顿N,则此处为PC/N;如是加速度,而且参数表中工程单位设为m/s2,则此处为PC/m/s2;如果是速度传感器,其灵敏度一般表示为mV/cm/s;位移传感器灵敏度一般表示为mV/μm)。
2.3 涡流传感器的连接方法涡流传感器由探头及前置器组成,前置器有三个接线端子:-24V、地及信号输出端。
该三个端子要分别连至仪器的三芯航空插座上。
航空插头的三芯定义是:1脚:-24V(红)2脚:信号输入(兰)3脚:地(屏蔽层)3、INV306U信号采集仪和INV1601型DASP软件INV306U系列信号采集仪为USB接口的便携式采集仪,适用于笔记本计算机、台式机、工控机等具有USB口的计算机。
INV306U采集仪安装在INV1601B型振动教学实验仪内,使系统结构更紧凑,体积更小,重量轻,便于携带。
3.1 INV1601型系统硬件安装连接通过系统配套数据连接线将计算机的USB口和INV1601B型振动教学实验仪后面板上的信号采集仪输出接口进行连接,配套DASP软件系统即可组成一套高性能的振动测试系统。
安装示意如图2:3.2 INV1601型DASP软件系统3.2.1软件简介INV1601型振动与控制教学实验系统(以下简称INV1601型)是用于振动力学和模态实验的教学实验软件系统,可运行在Windows95/98/Me/NT/2000/Xp平台上,进行多通道信号采集和实时分析。
INV1601型DASP软件主要包括DASP单通道、DASP双通道、DASP多通道和DASP 模态教学四个基本部分,以及可以选择的扩展模块和工程测试模块。
INV1601型DASP软件可以实现信号的实时分析,即可以连续不间断地进行信号的采样,并同时进行频谱分析和结果显示,实现了采样、分析和显示示波的同步进行。