平面四杆机构毕业设计说明书
平面四杆机构及设计
二、平面四杆机构的演化型式(续)
◆ 运动副元素的逆换 对于移动副,将运动副两元素的包容关系进行逆换, 并不影响两构件之间的相对运动。 摆动导杆机构 曲柄摇块机构
构件2包 容构件3
构件3包 容构件2
4-3 平面四杆机构的基本知识
一、平面四杆机构有曲柄的条件
◆分析: 构件AB要为曲柄,则转动 副A应为周转副; 为此AB杆应能占据整周中 的任何位置; 因此AB杆应能占据与AD共 线的位置AB'及AB''。 由△ DB'C' 由△DB'' C'' 两两相加
设计步骤: (1)建立坐标系和杆矢量 (2)列杆矢量封闭方程解析式
令a/a=1, b/a=m, c/a=n, d/a=l。
m cosθ 2i = l + n cos(θ 3i + ϕ 0 ) − cos(θ1i + α 0 )⎫ ⎬ m sin θ 2i = n sin(θ 3i + ϕ 0 ) − sin(θ1i + α 0 ) ⎭ P0
动画 根据杆数命名: 四杆机构
动画
中间构件称为连杆。
六杆机构 四杆机构ABCD 四杆机构DEF
四杆机构应用非 常广泛,且是多 杆机构的基础 着重 讨论
二、连杆机构的特点
优点: ①连杆机构为低副机构,运动副为面接触,压强小,承载 能力大,耐冲击; ② 运动副元素的几何形状多为平面或圆柱面,便于加工 制造; ③在原动件运动规律不变情况下,通过改变各构件的相对 长度可以使从动件得到不同的运动规律; ④可以连杆曲线可以满足不同运动轨迹的设计要求; 缺点: ①由于运动积累误差较大,因而影响传动精度; ②由于惯性力不好平衡而不适于高速传动; ③设计方法比较复杂。
平面四杆机构毕业设计说明书
1 绪论1.1 课题背景平面连杆机构在重型机械、纺织机械、食品机械、包装机械、农业机械中都有广泛的应用。
但是要在尽可能短的时间内设计出一个满足多种性能要求的机构却不是一件很容易的事情。
过去人们已建立了一些四杆机构的设计方法,然而这些方法与工程设计的要求还有一段距离,常常花费很多时间却只得到一个不可行的设计方案。
因为机构的运动性能如急回特性K,压力角α,从动件的摆角Ψ,极位夹角θ与构件尺寸有关,本身的这些运动性能之间也都相互影响,比如,四杆机构中,从动件急回特性K完全取决于极位夹角θ的作用。
本篇论文主要研究工程中应用比较多的Ⅰ、Ⅱ曲柄摇杆机构的传动角γ,极位夹角θ与机构尺寸之间的关系,然后运用工程分析软件ADAMS针对机构进行运动学分析,从而能给出设计平面四杆机构时为保证有较好的特性时,选取构件尺寸的建议。
进而为工程应用提供依据。
1.2 平面四杆机构的基本型式平面四杆机构可分为铰链四杆机构和含有移动副的四杆机构。
其中只有转动副的平面四杆机构称为铰链四杆机构[1]。
在铰链四杆机构中,能作整周回转的称为曲柄,只能在一定角度范围内摆动的称为摇杆。
由于曲柄和摇杆长度的不同,又可以将铰链四杆机构分为曲柄摇杆机构、双曲柄机构和双摇杆机构[2]。
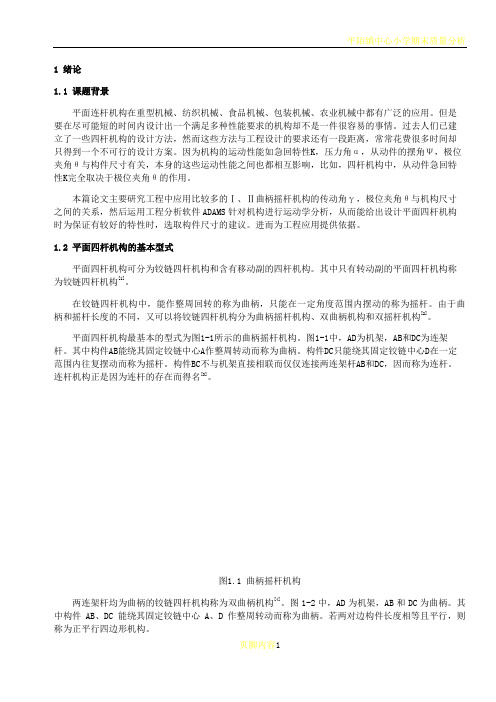
平面四杆机构最基本的型式为图1-1所示的曲柄摇杆机构。
图1-1中,AD为机架,AB和DC为连架杆。
其中构件AB能绕其固定铰链中心A作整周转动而称为曲柄。
构件DC只能绕其固定铰链中心D在一定范围内往复摆动而称为摇杆。
构件BC不与机架直接相联而仅仅连接两连架杆AB和DC,因而称为连杆。
连杆机构正是因为连杆的存在而得名[3]。
图1.1 曲柄摇杆机构两连架杆均为曲柄的铰链四杆机构称为双曲柄机构[4]。
图1-2中,AD为机架,AB和DC为曲柄。
其中构件AB、DC能绕其固定铰链中心A、D作整周转动而称为曲柄。
若两对边构件长度相等且平行,则称为正平行四边形机构。
图1.2 双曲柄机构两连架杆均为摇杆的铰链四杆机构称为双摇杆机构[5]。
基于UG的平面四连杆机构运动与仿真

毕业设计论文题目: 基于UG的平面四连杆机构设计及运动仿真专业名称机电设备维修与管理学生姓名李小军指导教师季祥毕业时间2011年7月毕业设计任务书指导教师:季祥一、设计题目用基于UG的空间四连杆机构设计及运动仿真二、设计的目的1)掌握UG的基本使用方法。
2)掌握四连杆机构的特点及虚拟装配的方法。
3)掌握UG中运动仿真的方法。
三、设计要求1)平面四连杆机构的三维造型。
2)平面四连杆机构的虚拟装配3)UG中平面四连杆机构的运动仿真。
4)仿真结果的分析四、完成的任务要求说明详细,字迹工整,原理正确,图纸规范,图形清晰,符号标准,线条均匀。
(1)设计与绘制平面四连杆机构,建立运动仿真的模型。
(2)毕业设计说明书(8000以上)1)设计题目2)四连杆机构原理说明3)四连杆机构的三维造型设计及虚拟装配4)UG的四连杆运动仿真5)设计总结及改进意见6)主要参考资料五、参考文献机械设计高等教育出版社主编濮良贵纪名刚机械原理高等教育出版社主编孙恒陈作模UG NX5.0中文版从入门到精通机械工业出版社主编胡仁喜、康士廷、刘昌丽目录摘要 (4)第1章绪论 (5)1.1 UG NX5的功能模块 (5)1.1.1 UG NX5用户界面 (5)1.1.2主要功能 (6)1.2 UG NX5的工作环境 (9)1.3 产品设计的一般过程 (12)1.4 三维造型设计步骤 (13)第二章平面连杆机构 (15)2.1 平面四杆机构的基本形式 (15)2.2 铰链四杆机构中曲柄存在的条件 (16)2.3 铰链四杆机构的演化 (17)第三章平面四杆机构的基本特性 (20)3.1 四杆机构的极位 (20)3.2 四杆机构从动件的急回特性 (20)3.3 平面连杆机构的传力特性 (20)3.4 死点位置 (21)第四章四连杆的三维造型 (22)4.1 机架的三维造型 (22)4.2 连架杆1的三维造型 (26)4.3 连架杆2的三维造型 (28)4.4 连杆的三维造型 (28)第五章四连杆的虚拟装配 (31)5.1 进入装配模块 (31)5.2 添加组件机架 (31)5.3 装配连架杆1 (32)5.4 装配连架杆2 (34)5.5 装配连杆 (35)第六章平面四连杆机构的运动仿真 (40)6.1 新建仿真 (40)6.2 新建连杆 (41)6.3 创建运动副 (43)第七章平面四连杆的运动仿真分析 (46)7.1 运动副图表分析 (46)7.2 死点位置 (49)结论 (51)致谢 (52)参考文献 (53)摘要UG NX是集CAD\CAE\CAM于一体的三维参数化软件,也是当今世界最先进的设计软件,它广泛应用于航空航天、汽车制造、机械电子等工程领域。
平面四杆机构的设计

一.按给定的行程速比系数设计四杆机构
设计具有 急回特性 的四杆机 构,关键 是要抓住 机构处于 极限位置 时的几何 关系,必 要时还应 考虑其他 辅助条件。
例:已知摇杆长度L=100,摆角 =50 和行程速比 系数k=1.4,试设计曲柄摇杆机构。
K 1 解: 由给定的行程速比系 180 = 30 数求出极位夹角 : K 1
2-4平面四杆机构的设计
设计类型 :
1.实现给定的运动规律:给定行程速 比系数以实现预期的急回特性、实现 连杆的几组给定位置等。 2.实现给定的运动轨迹:要求连杆上 某点沿着给定轨迹运动等。
设计目标 :
根据给定的运动条件,选定机构的类 型,确定机构中各构件的尺寸参数。
设计方法 :图解法、实验法和解析法等。
有无穷多个解。实际上,还应考虑几何、动力等辅助条 件,例如各杆所允许的尺寸范围、最小传动角或其他结 构上的要求,就可以合理选定A、D两点的位置而得到确 定的解。 如果给定连杆三个、四个或五个位置呢?
例:设计一铰链四杆 机构作为加热炉炉门 的启闭机构。已知炉 门上两活动铰链B、C 的中心距为50。要求 炉门打开后成水平位 置,且热面朝下(如 虚线所示)。如果规 定铰链A、D安装在炉 体的y-y坚直线上, 其相关尺寸如图所示。 用图解法求此铰链四 杆机构其余三杆的尺 寸。
C1 90- E l4
C2
A B1
B2 D
以A为圆心,AC1为 半径作圆弧交A与 E,平分EC2得曲柄 长度 AB 。再以A 为圆心, AB 为 半径作圆,交C1A 的延长线和C2A于 B1和B2,连杆长度
BC B 1 C 1 B 2 C 2
.
台式电风扇设计说明书

毕业设计说明书课题名称台式电风扇摇头装置及传动系统设计分院/专业机械工程学院/机械制造与自动化班级机自1011学号1001433130学生姓名周航指导教师:龚晓群2013年6月1日摘要电风扇摇头装置设计是从电风扇设计开始的,也是电风扇设计中最重要的部分,对于电风扇的研究,国外已有不少的研究成果,但在创新这一块做的还不够, 还有待进一步完善。
本文首先对摇头电风扇的历史和发展现状以及其类型和特点进行了介绍,然后介绍了设计准则, 提出方案拟定, 并选择最优方案,主要是现有的电风扇摇头装置中平面摇杆机构,包括平面摇杆机构的结构、工作原理、设计原理、设计原则;其次根据已知原动机的转速, 分配传动比,选择合适的机构, 如蜗轮蜗杆机构以及齿轮机构, 根据传动比确定它们的基本参数,设计计算几何尺寸,再次采用图解法, 根据已知条件(极位夹角, 摇杆速度等)设计平面四杆机构, 然后在实验室组建仿真机构模型, 观察所设计的尺寸是否满足所需的运动轨迹,再就制作台式电风扇摇头平面机构的计算机动态演示, 通过图解法研究各杆件的运动, 进行运动分析, 最后总结并讲述了电风扇的未来展望。
关键词:平面摇杆机构,传动比, 蜗轮蜗杆, 齿轮传动, 运动分析AbstractFanner shake head device design starts from the fan design, as well as the most important part of electric fan design for electric fan, has quite a few research results both at home and abroad, but in innovation that is not enough, it remains to be further improved.This article first to shake head to fanner's history and development status and its types and characteristics are introduced, and then introduces the design principles, scheme is proposed, and select the optimal scheme, mainly existing fanner shake head device planar rocker mechanism, including planar rocker mechanism of structure, working principle, design principle, principle of design; Secondly, according to the known prime mover speed distribution of transmission ratio, select the appropriate institutions, such as worm and worm wheel mechanism, and gear mechanism, according to transmission ratio to determine the basic parameters, design and calculation geometry, again USES graphic method, according to the known conditions (extreme position Angle, rocker speed, etc.) design of planar four-bar linkage, in the laboratory and then set up simulation model of institutions, characterize the design size whether to meet the required trajectory, from creating desktop fan shook his head again puter dynamic demonstration of planar mechanism, by graphical method research of each bar movement, movement analysis, finally summarizes and tells the story of fanner's future prospects.Keywords: Planar remote sensing mechanism, Transmission ratio, Worm gear and worm, Geartransmission, Motion analysis目录第1章绪论11.1摇头风扇的背景和意义11.2电风扇的技术情况11.2.1 电风扇的发展11.2.2 电风扇的前景11.3本课题的目的和关键问题1第2章台式电风扇的功能和设计要求32.1工作原理32.2功能分解32.2.1 设计摆动机构32.2.2 设计齿轮系机构32.2.3 满足传动性能要求3第3章摇头风扇的部机构选用33.1减速机构的选用43.1.1 啮合齿轮的优缺点43.1.2 外啮合齿轮的优缺点43.2传动轴线变换的选用53.2.1 蜗轮蜗杆机构的优缺点53.2.2 圆锥齿轮传动机构的优缺点53.3摇头机构的选用53.3.1四杆机构的优缺点53.3.2 凸轮机构的优缺点6第4章机构组合方案的比较及确定64.1三种方案的比较64.1.1 方案一及其优缺点64.1.2 方案二及其优缺点74.2方案的初步确定84.2.1 原动机的选择94.2.2 传动方案的确定94.3传动比设计94.3.1 相关计算94.3.2蜗轮蜗杆轮系设计94.3.3齿轮机构设计104.4执行机构尺寸设计114.4.1选择合适的比例11作图求摇杆的极限位置。
2.《平面四杆机构》教学设计方案

铰链四杆机构的基本类型、应用。
教学难点
铰链四杆机构的结构特点和运动特点。
学情分析
⑴专业能力需求:学生在顶岗实习和毕业后将进行各种机械操作岗位,企业员工需要具有①分析机械功能、动作、工作原理及操作一般机械的能力;②自学能力。
⑵学习态度分析:学生来自城镇,对机械并不陌生,愿意学习专业课,特别是实践技能性强的课程。
提出要求
布置作业
主动学习
1分钟
集中注意力
1分钟
引入新课
情景设置欣赏图片
复习提问回顾旧知
锁定情景
思考回答
激发兴趣
知识铺垫
2分钟
(一)铰链四杆机构的组成
全部用转动副相连的平面四杆机构。
机架——固定不动
连架杆——定轴转动(曲柄:整周转动/
摇杆:往复摆动)
连杆——平面运动
(二)铰链四杆机构的类型
在铰链四杆机构中,按连架杆能否作整周转动,可将铰链四杆机构分为:
⑶学习基础分析:①“绪论”学习,学生掌握了机械、机器、机构、零件等专业基础知识;②“构件、运动副与平面机构”知识点的学习,为本节课“平面四杆机构”的学习奠定了基础。
教学方法
(1)讲授法(2)实物演示法(3)讲练结合法(4)比较法(5)探究法
教学过程
师生活动
教学说明
教学目标
教学时间
组织教学
师生问好
准备上课
当主动摇杆摆动时,从动摇杆也随之摆动,同时在连杆上也可获得预期的运动轨迹。港口起重机等。
有一种特殊机构:等腰梯形机构
两摇杆长度相等车辆前轮转向机构等。
师生讨论
学生归纳
教师分析
教师启发
学生动脑
教师演示投影
2.《平面四杆机构》教学设计方案.doc

德育学生在课堂上思考、讨论与分析中体会到探究学习的乐趣。
思维的碰撞产生智慧,激发课师 授教课程基础平面 四杆机构课型新授课多媒体课件、 电脑、 黑板、模型教学目标识标 知目力标 能目(1) 了解较链四杆机构的组成;(2) 掌握较链四杆机构的基本类型及应用。
(1) 能够区别较链四杆机构的基本类型;(2) 能够描述较链四杆机构结构特点和运动特点。
目标学生善于思考,培养学生的团队合作精神。
教学重点教学难点较链四杆机构的基本类型、应用。
较链四杆机构的结构特点和运动特点。
(1)专业能力需求:学牛在顶岗实习和毕业后将进行各种机械操作岗位,企业员工需要具有①分析机械功学情分析能、动作、工作原理及操作一般机械的能力;②自学能力。
⑵学习态度分析:学生来自城镇,对机械并不陌生,愿意学习专业课,特别是实践技能性强的课程。
⑶ 学习基础分析:①“绪论”学习,学生掌握了机械、机器、机构、零件等专业基础知识;②“构件、运动副与平面机构”知识点的学习,为本节课“平面四杆机构”的学习奠定了基础。
教学方法(1)讲授法(2)实物演示法(3)讲练结合法(4)比较法(5)探究法教学过程组织教学引入新课师生活动教学说明教学目标教学时间师生问好情就叠欣赏图片复习提问回顾旧知准备上课锁定情景思考回答集中注意力激发兴趣知识铺垫1分钟2分钟(-)较链四杆机构的组成全部用转动副相连的平面四杆机构。
机架固定不动连架杆一一定轴转动(曲柄:整周转动/摇杆:往复摆动)(二)较链四杆机构的类型在较链四杆机构中,按连架杆能否作整周转动,可将较链四杆机构分为:1、曲柄摇杆机构2、双曲柄机构3、双摇杆机构教师讲解师生讨论教师提问学生动脑获得结论3分钟阐述较链四杆机构的概念。
教师演示动画,与学生共同讨论分析较链四杆机构组成。
依据连架杆能否作整周运动得出较链四杆机构的三种基本类型达到知识目标(1)达到知识目标(2)3分钟1、曲柄摇杆机构①以曲柄为主动件: 教师演示投3分钟②以摇杆为主动件: 将曲柄的回转运动转换成从动杆的往复摆动搅面机等。
毕业设计说明书-隧道清洁车除尘与安全

过去地铁大多采用人工吹扫作业的手段来进行操作,但是长时间之后发现,这样的方式工作环境太恶劣,工作效率也比较低、污染比较大大,所以对现在使用的吹扫工作方式要进行大大改进,本课题就是要研究一台工业机器人——除尘机械手,代替人工去实现地铁隧道侧面灰尘的自动清理。
2除尘机械手的设计的总体方案
2.1隧道清洁车侧面除尘与安全装置设计任务
现在世界上大约有一二百个城市拥有地铁,线路总长已经超过了八千多公里。英国伦敦市内的地铁总长408公里多。东京的地铁达2000公里,年运输量超过了100亿次。美国就纽约就有27条,长为443公里。巴黎的轨道交通占有率为70%。地铁有15条线路,199公里。俄罗斯莫斯科有一个覆盖全市区的立体交叉地铁网,长度有三百千米,拥有一百四十多个车站。每天运输量高达800多万次,位居世界之最。
我国随着经济的发展,城市化和工业化的进程正飞速不停地前进,市区的交通状况开始严重地制约我国城市高速发展的节奏。据统计,我国拥有100万人口的城市有34个,拥有50到100万的人口的城市也达到了43个。目前形式下,过量的城市人群拥挤在城市狭小的范围内,加上机动车和非机动车大量的购买,交通是一大问题。为了缓解目前这种交通状况。我国建设了很多地铁,地铁的建设提高了交通的运行效率。吸引了人们的实用,促进城市发展,改善了公共交通环境。
课题任务是设计一台除尘机械手,代替人工做地铁隧道侧面灰尘的自动除尘工作。其参照的原始数据和设计要求为:
(1)地铁隧道截面为圆形,其半径为4米,最高点为6.5米。
(2)手臂末段安装吸尘头,可以将机械手安装在专用的(或者改装的)车辆上,允许每单程清理半面隧道。
(3)车辆行驶的速度要求最低为15kmБайду номын сангаасh。
(2)粒子荷电
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 绪论1.1 课题背景平面连杆机构在重型机械、纺织机械、食品机械、包装机械、农业机械中都有广泛的应用。
但是要在尽可能短的时间内设计出一个满足多种性能要求的机构却不是一件很容易的事情。
过去人们已建立了一些四杆机构的设计方法,然而这些方法与工程设计的要求还有一段距离,常常花费很多时间却只得到一个不可行的设计方案。
因为机构的运动性能如急回特性K,压力角α,从动件的摆角Ψ,极位夹角θ与构件尺寸有关,本身的这些运动性能之间也都相互影响,比如,四杆机构中,从动件急回特性K完全取决于极位夹角θ的作用。
本篇论文主要研究工程中应用比较多的Ⅰ、Ⅱ曲柄摇杆机构的传动角γ,极位夹角θ与机构尺寸之间的关系,然后运用工程分析软件ADAMS针对机构进行运动学分析,从而能给出设计平面四杆机构时为保证有较好的特性时,选取构件尺寸的建议。
进而为工程应用提供依据。
1.2 平面四杆机构的基本型式平面四杆机构可分为铰链四杆机构和含有移动副的四杆机构。
其中只有转动副的平面四杆机构称为铰链四杆机构[1]。
在铰链四杆机构中,能作整周回转的称为曲柄,只能在一定角度范围内摆动的称为摇杆。
由于曲柄和摇杆长度的不同,又可以将铰链四杆机构分为曲柄摇杆机构、双曲柄机构和双摇杆机构[2]。
平面四杆机构最基本的型式为图1-1所示的曲柄摇杆机构。
图1-1中,AD为机架,AB和DC为连架杆。
其中构件AB能绕其固定铰链中心A作整周转动而称为曲柄。
构件DC只能绕其固定铰链中心D在一定范围内往复摆动而称为摇杆。
构件BC不与机架直接相联而仅仅连接两连架杆AB和DC,因而称为连杆。
连杆机构正是因为连杆的存在而得名[3]。
图1.1 曲柄摇杆机构两连架杆均为曲柄的铰链四杆机构称为双曲柄机构[4]。
图1-2中,AD为机架,AB和DC为曲柄。
其中构件AB、DC能绕其固定铰链中心A、D作整周转动而称为曲柄。
若两对边构件长度相等且平行,则称为正平行四边形机构。
图1.2 双曲柄机构两连架杆均为摇杆的铰链四杆机构称为双摇杆机构[5]。
如图1-3中,AD为机架,构件AB、DC只能绕其固定铰链中心A、D在一定范围内往复摆动而称为摇杆。
图1.3 双摇杆机构1.3 平面四杆机构的演化1. 回转副演化成移动副下图1-4表示了曲柄摇杆机构先演化为曲柄滑块机构过程。
在实际中,曲柄滑块机构在金属切削机床、内燃机和空气压缩机等各种机械中得到了广泛的应用。
图1.4 移动副的演化过程2. 取不同的构件为机架铰链四杆机构的三种基本型式,可看作是由曲柄摇杆机构改变机架而得到的,如图1-5所示。
图1.5 曲柄摇杆机构的演化过程对于曲柄滑块机构,若选取不同构件为机架,同样也可以得到不同型式的机构,如图1-6所示。
曲柄滑块机构导杆机构摇块机构直动滑杆机构图1.6 改变曲柄滑块机构的机架得到的不同型式3. 扩大回转副由于结构的需要和受力的要求,使曲柄与连杆连接处的回转副的销轴扩大,形成一个几何中心与其回转中心不重合的圆盘,此盘就称为偏心轮。
回转中心与几何轴心的距离称为偏心距(即曲柄长度),这种机构称为偏心轮机构(如图1-7)。
显然,这种机构与曲柄滑块机构的运动特性完全相同。
常用于要求行程短、受力大的场合,如冲床、剪床等机械中[6]。
图1.7曲柄滑块机构演化成偏心轮机构1.4 平面四杆机构的主要工作特性在讨论平面四杆机构的运动特性之前,就与机构运动性能有关的一些基本知识作一些简单的介绍。
1.4.1 铰链四杆机构的曲柄存在条件铰链四杆机构的曲柄存在条件:(1)在曲柄摇杆机构中,曲柄是最短杆;(2)最短杆与最长杆长度之和小于或等于其余两杆长度之和。
以上两条件是曲柄存在的必要条件。
因此,当各杆长度不变而取不同杆为机架时,可以得到不同类型的铰链四杆机构。
(a)取最短杆相邻的构件(如杆2)为机架时,最短杆1为曲柄,而另一连架杆3为摇杆,故图1.8所示的机构为曲柄摇杆机构。
(b)取最短杆为机架,其连架杆2和4均为曲柄,故图1.9所示为双曲柄机构。
(c)取最短杆的对边(杆3)为机架,则两连架杆2和4都不能作整周转动,故图1.10所示为双摇杆机构。
图1.8 曲柄摇杆机构图1.9 双曲柄机构图1.10 双摇杆机构如果铰链四杆机构中的最短杆与最长杆长度之和大于其余两杆长度之和,则该机构中不可能存在曲柄,无论取哪个构件作为机架,都只能得到双摇杆机构。
由上述分析可知,最短杆和最长杆长度之和小于或等于其余两杆长度之和是铰链四杆机构存在曲柄的必要条件。
满足这个条件的机构究竟有一个曲柄、两个曲柄或没有曲柄,还需根据取何杆为机架来判断[7]。
1.4.2 行程速度变化系数当原动件(曲柄)做匀速定轴转动时,从动件相对于机架作往复运动(摆动或移动)的连杆机构,从动件正行程和反行程的位移量相同,而所需的时间一般并不相等,正反两个行程的平均速度也就不相等。
这种现象称为机构的急回特性。
在工程实际中,为了提高生产率,保证产品质量,常常使从动件的慢速运动行程为工作行程,而从动件的快速运动行程为空回行程。
因此,正确分析平面连杆机构的急回特性,在机构分析和设计中具有很重要意义。
为反应急回特性的相对程度,引入从动件行程速度变化系数,用K表示,其值为从动件快行程平均速度与从动件慢行程平均速度的比值(K≥1)在图1.11所示的曲柄摇杆机构中,曲柄与连杆重叠共线的AB1和拉直共线的AB2分别对应于从动件的两个极限位置C1D和C2D,矢径AB1和AB2将以A为圆心、曲柄长为半径的圆分割为圆心角不等的两部分,其中圆心角较大的用α1(≥180°)表示,小者用α2(≤180°)表示,由α1=180°+θ,α2=180°-θ可得θ=(α1-α2)/2若曲柄以匀速转过α1和α2对应的时间为t1(对应于从动件慢行程)和t2(对应于从动件快行程),则根据行程速度变化系数的定义,有:11801k k θ-=+o 因此,机构的急回特性也可以用θ角来表示,由于θ与从动件极限位置对应的曲柄位置有关,故称其为极位夹角。
对于曲柄摇杆机构,极位夹角即为∠C 1AC 2。
其值与机构尺寸有关,可能小于90°,也可能大于90°,一般范围为0°到180°。
图1.11 曲柄摇杆机构的行程速比系数分析除曲柄摇杆机构外,偏置曲柄滑块机构和导杆机构也有急回特性。
如图1.12所示的偏置曲柄滑块机构,极位夹角为θ=∠C 1AC 2<90° 滑块慢行程的方向与曲柄的转向和偏置方向有关。
当偏距e=0时,θ=0,即对心曲柄滑块机构无急回特性。
图1.12 偏置曲柄滑块机构图1.13表示了摆动导杆机构的极位夹角,其取值范围为(0°,180°),并有ψ=θ。
导杆慢行程摆动方向总是与曲柄转向相同[8]。
图1.13 转动导杆机构4.3 压力角和传动角在图1.14所示的曲柄摇杆ABCD中,若不考虑构件的惯性力和运动副中的摩擦力的影响,当曲柄AB为主动件时,则通过连杆BC作用于从动件摇杆CD上的力P即沿BC方向。
该力P的作用线与其作用点C的绝对速度υc之间所夹的锐角α称为压力角。
图1.14 曲柄摇杆机构的压力角分析由图可见,力P可分解为沿点C绝对速度υc 方向的分力Pt及沿构件CD方向的分力Pn,Pn只能使铰链C及D产生径向压力,而分力Pt 才是推动从动件CD运动的有效分力,其值Pt=Pcosα=Psinγ.显然,压力角α越小,其有效分力Pt则越大,亦即机构的传动效益越高。
为了便于度量,引入压力角α的余角γ=90°-α,该角γ称为传动角。
显然,角γ越大,则有效分力Pt 则越大而Pn就越小,因此在机构中常用其传动角γ的大小及其变化情况来表示机构的传力性能。
传动角γ的大小是随机构位置的不同而变化的。
为了保证机构具有良好的传动性能,综合机构时,通常应使γmax≥40°。
尤其对于一些具有短暂高峰载荷的机构,可利用其传动角接近γmax时进行工作,从而节省动力[9]。
1.4.4 死点在曲柄摇杆机构中,如图1.15所示,若取摇杆作为原动件,则摇杆在两极限位置时,通过连杆加于曲柄的力P将经过铰链A的中心,此时传动角γ=0,即α=90°,故Pt=0,它不能推动曲柄转动,而使整个机构处于静止状态。
这种位置称为死点。
对传动而言,机构有死点是一个缺陷,需设法加以克服,例如可利用构件的惯性通过死点。
缝纫机在运动中就是依靠皮带轮的惯性来通过死点的。
也可以采用机构错位排列的办法,即将两组以上的机构组合起来,使各组机构的死点错开。
图1.15 曲柄摇杆机构死点位置构件的死点位置并非总是起消极作用。
在工程中,也常利用死点位置来实现一定的工作要求。
例如图1.16所示工件夹紧机构,当在P力作用下夹紧工件时,铰链中心B﹑C﹑D共线,机构处于死点位置,此时工件加在构件1上的反作用力Q无论多大,也不能使构件3转动,这就保证在去掉外力P之后,仍能可靠夹紧工件。
当需要取出工件时,只要在手柄上施加向上的外力,就可以使机构离开死点位置,从而松脱工件[10]。
图1.16 工件夹紧机构1.5 连杆机构的特点与应用平面连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面复杂运动,从而可用于实现已知运动规律和已知轨迹。
连杆机构之所以能被广泛地应用于各种机械及仪表中,这是由于它具有显著的优点:由于运动副元素为圆柱面和平面而易于加工、安装并能保证精度要求,且因各构件之间为面接触而压强小,便于润滑,故其磨损小且承载能力大,两构件之间的接触是靠其本身的几何封闭来维系的,它不象凸轮机构有时需利用弹簧等力来保持接触;当主动件的运动规律不变时,仅改变机构中构件的相对长度,则可使从动件得到多种不同的运动规律:另外,也可利用连杆曲线的多样性来满足工程上的各种轨迹要求[11]。
1.6 简单介绍本篇论文中所用到的软件(1) VB软件a. 概述Visual Basic(VB)的开发基础:Microsoft公司的Basic语言。
Visual—“可视化”、“形象化”的意思,指的是开发图形用户界面(GUI—Graphical User Interfaces)的方法。
Basic—是“Beginners All-purpose Symbolic Instruction Code”的缩写,即“初学者通用符号指令代码”,是专为初学者设计的高级语言。
b. 特点1.是面向对象的可视化编程工具不需要编写大量的代码。
2.仍然采用三种基本结构化程序设计方法。
3.采用事件驱动的编程机制。
4.提供了易学易用的应用程序集成开发环境。
5.支持多种数据库系统的访问(MS Access 、Foxpro 、SQL Sever)。
6.支持对象链接与嵌入技术(OLE—Object Linking and Embedding)。