运动分析软件介绍
系统简介
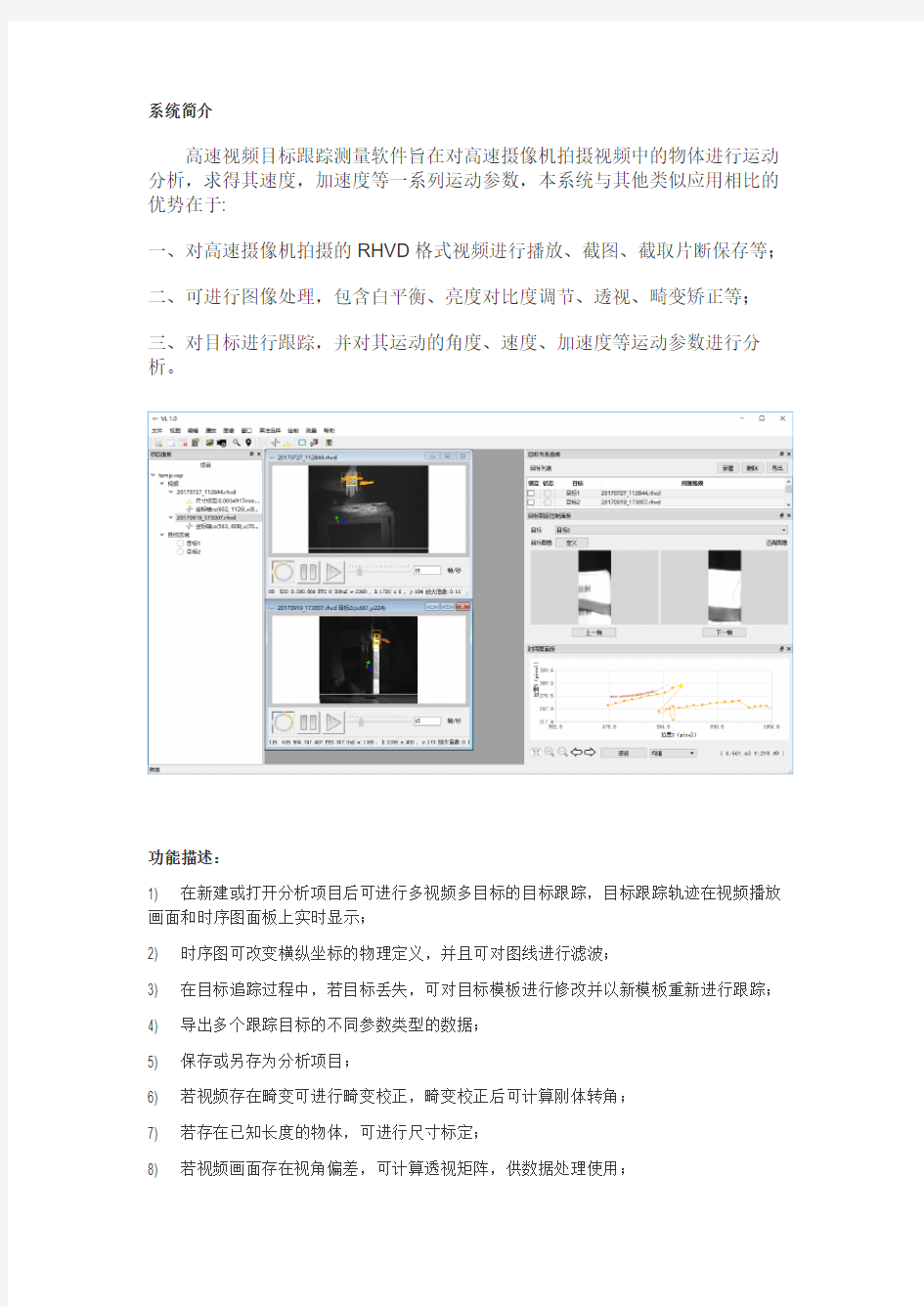
高速视频目标跟踪测量软件旨在对高速摄像机拍摄视频中的物体进行运动分析,求得其速度,加速度等一系列运动参数,本系统与其他类似应用相比的优势在于:
一、对高速摄像机拍摄的RHVD格式视频进行播放、截图、截取片断保存等;
二、可进行图像处理,包含白平衡、亮度对比度调节、透视、畸变矫正等;
三、对目标进行跟踪,并对其运动的角度、速度、加速度等运动参数进行分析。
功能描述:
1) 在新建或打开分析项目后可进行多视频多目标的目标跟踪,目标跟踪轨迹在视频播放画面和时序图面板上实时显示;
2) 时序图可改变横纵坐标的物理定义,并且可对图线进行滤波;
3) 在目标追踪过程中,若目标丢失,可对目标模板进行修改并以新模板重新进行跟踪;
4) 导出多个跟踪目标的不同参数类型的数据;
5) 保存或另存为分析项目;
6) 若视频存在畸变可进行畸变校正,畸变校正后可计算刚体转角;
7) 若存在已知长度的物体,可进行尺寸标定;
8) 若视频画面存在视角偏差,可计算透视矩阵,供数据处理使用;
9) 设置坐标系时可指定坐标系原点和X轴方向,并根据透视矩阵计算出X轴与Y轴的夹角;
10) 改变视频播放帧率;
11) 截取视频画面并保存;
12) 导出视频的时间序列;
13) 显示视频的参数;
14) 选中视频的一部分,并删去不感兴趣的帧;
15) 定位到视频的某一帧或某一时刻;
16) 控制视频单次播放或循环播放,当存在几个播放视频时能够设置同步播放;
17) 导出视频为.avi格式,导出时可选择导出整个视频或选中的部分;
18) 调节视频播放的色彩模式,在彩色模式下还能够选择视频白平衡的状态
19) 调节视频的亮度和对比度;
20) 对存在亮场和暗场的视频进行亮场矫正和暗场矫正;
21) 基于原图像对图像进行90°、180°、270°旋转;
22) 对图像进行缩放和拖拽;
23) 图像可适应窗口或以原始大小显示。
应用场合
1、运动分析、长度测量、角度测量、面积测量、轮廓分析
2、畸变校正分析处理
3、透视分析
4、视频文件基本处理,如亮度、对比度,暗场、亮场、同步、定位等
5、高速运动的分析追踪
大学专业介绍之生物科学类1(生物科学、生物技术、生物信息学)
大学专业介绍之生物科学类1(生物科学、生物技术、生物 信息学) 1.生物科学 本专业培养具有生物科学学科的基本理论、基本知识、基本技能,同时掌握生物科学的理论前沿、应用前景、最新发展动态和应用能力的技术人才,为我国生态建设及植物资源利用和中药资源产业化提供能从事教学、技术研究、生产管理、产品开发等方面的高级技术人才。 业务培养要求:本专业学生主要学习生物科学方面的基本理论、基本知识,受到基础研究和应用基础研究方面的科学思维和科学实验训练,具有较好的科学 1. 2.掌握动物生物学、植物生物学、微生物学、生物化学、细胞生物学、遗传学、发育生物学、神经生物学、分子生物学、生态学等方面的基本理论、基本知 3.
4. 5. 6.掌握资料查询、文献检索及运用现代信息技术获取相关信息的基本方法;具有一定的实验设计,创造实验条件,归纳、整理、分析实验结果,撰写论文, 主干课程:植物生物学、动物学、微生物学、生物化学、生物化学实验技术、细胞生物学、遗传学、分子生物学、植物生理学、生态学、天然产物化学、药用植物资源学、中药材生产质量控制、中药材加工学、生物制药等。 就业方向与深造:毕业后可在科研机构、学校从事药用植物和植物生态与资源利用科学研究和教学工作;在企、事业单位从事技术研究、产品开发和生产管理等工作。 2.生物技术 本专业是以生物化学和分子生物学为基础、应用于现代生物技术产业为特色的理科类专业。培养系统掌握现代生命科学知识、生物技术的基本理论和基因工程、细胞工程、发酵工程、生物信息及数据分析等技能,具备良好的科学素养和创新精神的高级专门人才。 主干课程:普通生物学、生物化学与分子生物学、微生物学、细胞生物学、遗传学、基因工程原理与技术、酶工程原理及技术、细胞工程原理与技术、微生物与发酵工程,生物信息学等。 业务培养要求:本专业学生主要学习生物技术方面的基本理论、基本知识,受到应用基础研究和技术开发方面的科学思维和科学实验训练,具有较好的科学
机器人学得一个正运动学举例说明
PUMA 560 运动分析(表示)
1 正解
PUMA 560 是属于关节式机器人,6 个关节都是转动关节。前 3 个关节确定手腕参 考点的位置,后 3 个关节确定手腕的方位。
各连杆坐标系如图 1 所示。相应的连杆参数列于表 1。
图 1 机器人模型
PUMA560 每个关节均有角度零位与正负方向限位开关,机器人的回转机体实现机 器人机体绕 z0 轴的回转(角1 ),它由固定底座和回转工作台组成。安装在轴中心的驱 动电机经传动装置,可以实现工作台的回转。大臂、小臂的平衡由机器人中的平衡装置 控制,在机器人的回转工作台上安装有大臂台座,将大臂下端关节支承在台座上,大臂 的上端关节用于支承小臂。大臂臂体的下端安有直流伺服电机,可控制大臂上下摆动(角 2 )。小臂支承于大臂臂体的上关节处,其驱动电机可带动小臂做上下俯仰(角3 ),以 及小臂的回转(4 )。机器人的腕部位于小臂臂体前端,通过伺服电动机传动,可实现
腕部摆动(5 )和转动(6 )。 下图为简化模型:
T i1 6
Ai Ai1 A6
图 2 机器人简化模型
表1
机械手的末端装置即为连杆
6
的坐标系,它与连杆坐标系的关系可由
T i1 6
表示:
T i 1 6
Ai Ai1 A6
(1)
可得连杆变换通式为 :
ci
si
0
ai1
T i1 i
si
c
i
1
si si1
cici1 ci si1
si1 ci1
di
si1
dici1
(2)
0
0
0
1
据连杆变换通式式(2)和表 1 所示连杆参数,可求得各连杆变换矩阵如下:
生物技术专业介绍
生物技术专业介绍 生物技术专业是于2000年设立并正式开始招生,经过多年的建设,现已成为学校的优势专业,是山东省特色专业,又是山东省应用型特色名校工程重点建设专业。 一、人才培养目标 培养德、智、体、美全面发展,系统掌握农业生物技术的基本理论、基本知识、基本技能,具有较强的自主学习能力、实践能力、创新能力,能够支撑现代农业生物技术产业体系,服务于山东区域经济社会发展的高素质应用型人才。 二、特色和优势 1. 构建了一支高学历、教学经验丰富、科研能力强的一支师资队伍。本专业现有专职教师70人,其中正高职称22人、副高职称28人,讲师20人,高级职称教师占71.4%;具有博士学位的教师57人,占专职教师的81.4%;具有国外学习和研修经历的19人;泰山学者海外特聘专家3人、山东省教学名师2人、国务院特殊津贴获得者1人、“留学回国人员成就奖” 获得者1人、博士生导师4人。 2. 具有生物学科特色。本专业具有植物学、动物学、微生物学、生理学、遗传学等多学科支撑,以及生物化学与分子生物学省级重点学科支撑,生物学科特色鲜明。我们在生物技术专业的建设中,以厚基础,宽口径为前提,在课程体系与教学内容上力求突出自身的学科优势,形成专业特色,培养高素质应用型生物技术专业人才。 3. 以科研促教学,提高人才培养质量。(1)通过科研,提高教师自身素质,为提高教学质量提供了重要保证;(2)科研促进了教学条件的建设。在投资1000多万购置实验仪器的基础上,目前又新组建了科研用组培室与炼苗室各1间及教学用组培室与炼苗室各1间,极大充实了教学条件;(3)科研充实了教学内容。通过科研,提高教师学术水平,把新知识、新观点及时充实到教学中,激发学生对学科的兴趣,切实提高教学质量;(4)科研培养学生动手能力、创新思维。本专业于2003年率先在全校实施了“本科生导师制”制度,使学生从大二开始进入实验室,参与教师的科研活动,独立设计试验并完成科研任务,切实提高学生独立操作能力及创新能力。 三、学科建设 本专业为山东省特色专业,先后获得生物化学与分子生物学、遗传学、植物
六轴运动机器人运动学求解分析_第一讲
六轴联动机械臂运动学求解分析 第一讲 作者朱森光 Email zsgsoft@https://www.360docs.net/doc/0c4589691.html,
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者工作主要从事软件开发跟机器人毫无关系,利用业余时间研究整理机器人技术相关的文章,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术资料。本系列文章的所有文字、图片及相关资料均为原创,内容正确性经过笔者亲自编程仿真验证可以信赖。 2机器建模 2.1坐标系 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右为X轴,屏幕水平向上为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,灰色立方体为机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色为关节2,它能绕图中的Z1轴旋转;蓝色为关节3,它能绕图中的Z2轴旋转;绿色为关节4,它能绕图中的X3轴旋转;红色为关节5,它能绕图中的Z4轴旋转;黄色为关节6,它能绕图中的X5轴旋转。 2.2齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为-60度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为+60度。以上定义中角度正负值定义符合右手法则。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 cosθ0 s0 = sinθ0 = //c0 R0=[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0
运动学矢量法一般解题方法(修改稿)
运动学概念及矢量法解题一般方法 (132492629群主) 运动学是定律描述物体运动状态和过程的数学理论。 学生在学习运动学知识时,一定要掌握一般解题方法;在掌握一般解题方法后,再学习一些技巧;而不要反过来,否则,技巧越多,需要记忆的越多,最后负担过重,弄巧成拙。 下面,我讲讲运动学解题的基本方法。 一、 基本概念 1、 矢量 位移、速度、加速度,都是矢量,因为它们都有大小和方向。 2、 位置矢量 由坐标原点向位置点作有向线段,如右图,O A 、OB 都 是位 置点A 、B 的位置矢量。 位置矢量有大小,有方向。如O A ,大小就是OA 的长度, 方向 就是由O 指向A 。 3、 位移 一段时间内质点位置矢量的变化量,就是位移。如右图 中, AB 就是位移矢量。 位移是矢量,既有大小,又有方向。大小,就是起点至终点的(直线)距离;方向,就是起点朝着终点的指向。 位移,就是一条起点指向终点的线段。 【点睛】位移只与两点有关:起点,终点。
前面说过,位移是有方向的。通常,方向要事前进行设定。如上图,向右的方向(数轴方向)被设定为正方向。 左图Δx = x 2 – x 1 > 0,表示物体位移方向与数轴方向一致;右图Δx = x B – x A < 0,表示物体位移方向与数轴方向相反。 4、 速度 速度是矢量,既有大小,又有方向。 从公式可以看出,速度的方向,就是位移方向。 5、 加速度 加速度是矢量,既有大小,又有方向。 加速度方向,和速度的改变Δv 方向一致。 右图,位移(数轴)方向为右向,速度的方向也是右向;上图的汽车加速度为右向,即a >0;下图的汽车加速度为左向,即 a <0。 二、学会看懂图像(匀速、匀变速直线运动) 1、位移时间图像都告诉你什么? ①(横轴)时间: 甲的起始时刻0s ,结束时刻25s ; 乙的起始时刻10s ,结束时刻25s 。
生物学专业自我介绍范文
生物学专业自我介绍范文 每一次自我介绍都是一次销售自己的开始,那么生物专业的你成功了吗以下是小编为您整理的生物学专业自我介绍内容,希望能帮到你。 生物学专业自我介绍第一篇我叫xxx,是山东师范大学生命科学学院生物技术专业2012届毕业生。 大学四年,我始终严格要求自己,全方面锻炼和发展自我。不断的加强与人沟通交流的能力并取得了很大的提高,积极的参加实践活动,大大的提高了我的实践能力。学习上,我踏实努力,以优秀的成绩通过了所有课程,连续三年获得三好学生的称号并获得二等奖学金,专业成绩名列前茅。实验操作能力在大学期间得到很大的提高,能够顺利地独立完成实验课程。同时,我广泛学习了英语、计算机等各方面知识,先后通过了国家英语 四、六级考试,国家计算机水平考试二级,三级,能熟练操作计算机常用软件。我有着很强的学习能力和适应新环境的能力,较强的团体协作能力和实践能力。 我的学校XX师范大学是山东省省属重点大学,具备师范类及非师范类专业。我所在专业生物技术专业是非师范类的,侧重于生产应用,所学习课程是面向生物制药公司,发酵类公司,以及研发部门的。除学习了较宽广的生物基础知
识外,我对生物技术的四大工程课程还有着较深入的学习。 生物学专业自我介绍第二篇我是生物工程系06级园艺班学生洪转移,作为一名即将毕业的大学生,社会实践是我们在大学学习生活中的一个重要环节,现在毕业后找工作首先要求有工作经验,如果能提前在企业实习,正好为将来求职积累一些资本。大三第一学期末,我有幸到连云港振兴恒巨花卉实习,在将近4个月的实习期里,我初步接触到蝴蝶兰各个苗期的栽培与养护的一些技术,催花技术,组盆技术以及年宵花卉出售情况,熟悉了蝴蝶兰的生物学特性,在不同的生长时期蝴蝶兰对光照,温度,水分,湿度,肥料的要求以及病虫害的防治等。积累了一定的社会经验和工作经验。负责指导我的是一名姓李的主管,实习内容主要是蝴蝶兰的日常管理技术。在我们主管的悉心教导下,很快我就熟悉了蝴蝶兰的栽培与养护流程,使自己的基础知识更牢固,技术更全面,实际操作能力有所提高,以下就是我的一些实习过程和体会。 首先实习让我觉得很新鲜,因为这毕竟是自己的第一个实习单位,也觉得自己应该会在这里过得很快乐的。第一天进仓实习,我怀着惴惴不安的心情。只见几个陌生的脸孔。我微笑着和他们打招呼。从那天起,我养成了一个习惯,每天早上见到他们都要微笑的说声你早或早上好,那是我心底真诚的问候。我总觉得,经常有一些细微的东西容易被我们
人体运动规律
教学内容 1、人的运动规律 (1)人的骨骼:在动画片中,表现最多的是人物动作及拟人化角色的动作(见图1) (2)人的关节:人的主要关节位于腰部,肩部,肘部,腕部,股部,膝部,踝骨,颈部(见图1) (图1)运动中人的骨骼和关节 (3)人体的重心:人体重量的集中作用点(平衡点)是人体的重心(见图2) (图2)人体重心
(4)动作的表情:动作和表情是重要的动画语言。(见图3) (图3)人物动作与表情 2、人的基本规律性动作 (1)人的走路动作:用脚掌着地,左右两脚交替向前,带动躯干朝前运动(见图4) a.人走路动作的基本规律 b.头部的上下波动 c.手臂的摆动:钟摆定理 (图4)人走路的动态分析 (2)人的奔跑动作: 身体前倾,手臂略呈弯曲状以较大的幅度配合双脚的交替跨步向前摆动,跨步的幅度大于走路时的幅度,膝关节的弯曲度大于走路时的弯曲度,脚抬得较高。(见图5)
(图5)人跑步的动态分析 3、人的头部运动 (1)头部的转动: 以鼻子作为脸部中心点画一直线,当头转动时,由于透视原因,接近正面的一半距离大,远离正面距离小;(见图 6 (图6)头部的转动分析 (2)表情:要具有表演的创作意图(见图7) (图7)人的表情
(3)对白中的口型:欧美的常用口型是A,B,C,D,E,F,偶尔会有G,H日本的常用口型是A,B,C 。(见图8) (图8)角色口型 4、走路画法 走路的基本规律是:左右脚交替向前,带动人的身体向前运动,为了保持身体的平衡,配合双脚的屈伸、跨步、双臂前后摆动。(见图9) (图9)走路示范 5、跑步的画法
(1)奔跑动作的基本规律:身体重心前倾,手臂成弯曲状,奔跑时手臂配合双脚的跨步作前后摆动,双脚跨步的动作幅度较大,膝关节弯曲的角度较大,脚抬得较高,因此头高低的波形运动也比走路明显,在奔跑时,双脚几乎没有同时着地的时间,而是依靠单脚支撑身体的重量,有些快跑动作中间可以有1到2格是双脚同时离地的腾空过程。(见图10) (图10)跑步正面 (2)注意事项:人物前倾的动态应前后保持一致,原画张与动画中割张上半身身体保持一个前倾的姿态。(见图11)
食品生物技术专业简介
食品生物技术专业简介 专业代码570101 专业名称食品生物技术 基本修业年限三年 培养目标 本专业培养德、智、体、美全面发展,具有良好职业道德和人文素养,掌握生物化学、微生物发酵技术、食品生物新技术等基本知识,具备发酵、产品分离提取、菌种培养等能力,从事调味品及食品添加剂、酒、饮料及精制茶等生物食品的生产操作、设备使用和维护、生产过程质量监控、工艺与设备管理、技术研发辅助等工作的高素质技术技能人才。 就业面向 主要面向生物食品制造技术及应用行业,在发酵、产品分离提取、菌种培养等岗位群,从事生产操作、设备使用和维护、生产过程质量监控、工艺与设备管理、技术研发辅助、生物产品检验检疫、生物产品销售等工作。 主要职业能力 1.具备对新知识、新技能的学习能力和创新创业能力; 2.具备在工作中发现问题和寻找解决问题方法的能力; 3.具备食品生物新技术初步研发的能力; 4.掌握生产过程质量管理的相关知识及技能,具备生物食品生产过程质量监控的能力; 5.掌握生物食品工艺技术及应用,具备生物食品生产工艺与设备管理的能力; 6.掌握微生物菌种培养、发酵和产品提取的基本知识及技能,具备生物食品生产操作的能力; 7.了解相关生产设备的结构、工作原理及基本操作,具备生物食品生产设备使用
和维护的能力。 核心课程与实习实训 1.核心课程 生物化学、微生物基础、微生物发酵技术、发酵工程设备、食品质量与安全、发酵食品生产技术、食品生物新技术等。 2.实习实训 在校内进行微生物基础技能训练、微生物发酵技术技能训练、发酵食品生产技术综合训练、食品生物新技术研发训练等实训。 在生物食品生产企业进行实习。 职业资格证书举例 发酵工微生物培菌工酿酒工酱油酱类制作工食用酶制剂制造工 衔接中职专业举例 食品生物工艺 接续本科专业举例 生物技术生物工程酿酒工程
生物技术(本科)课程简介
生物工程专业本科人才培养计划 一、培养目标 本专业旨在培养德、智、体全面发展,系统掌握生物工程专业的基础知识、基本理论与基本技能,具有较强的生物工程技能和创新能力,能够在生物工程及相关领域,从事生产工艺及技术管理、教学、新技术研究及新产品开发工作的高素质的应用型人才。 二、基本业务规格 1.具有良好的道德修养、心理素质和健康的体魄; 2.掌握本专业长远发展所必需的自然科学的基础理论和基本知识; 3.掌握生物学、生物化学、微生物学、化工原理、生化分离工程、生物工程设备、发酵工程、酶工程、细胞工程及基因工程等学科的基本理论、基本知识和基本技能; 4.有一定的分析和解决问题的能力,具备在生物工程领域从事生产工艺及技术管理、教学、新技术研究及新产品开发的基本能力; 5.解生物工程学科的理论前沿、应用前景和最新发展动态; 6.具有本专业所需的计算机应用的初步能力; 7.掌握一门外国语言,具有较熟练的听、说、读、写、译能力。 三、基准学制四年 四、授予学位工学学士 五、主干学科生物学 六、专业主干课程 生物化学、化工原理、生物分离工程、生物工程设备、分子生物学与基因工程、细胞生物学与细胞工程、发酵工程、酶工程等。 七、课程设置及学分要求 本专业毕业最低学分为160学分,其中,普通教育课程31学分,基础教学课程37学分,专业教学课程37学分,实践教学环节40学分,公共选修课程15学分。 本专业毕业另须修满10个素质拓展学分。
生物工程专业本科主要课程简介 课程代码:1F10691 课程名称:生物化学Biochemistry 学分:3 预修课程:无机及分析化学、有机化学、生物学概论 内容简介:本课程主要介绍生物化学的发展历史,生物化学研究中的重要化学概念,组成蛋白质的20种天然氨基酸,蛋白质的化学组成,蛋白质的空间结构,几种重要蛋白质的结构与功能关系,蛋白质研究的方法学,酶催化原理,核苷酸和核酸的结构与功能,脂类的结构与功能,生物膜的化学组成、结构和跨膜运输原理,碳水化合物的结构与功能。生物能量学,生物分子的分解合成代谢,遗传信息的复制及表达调控机制。 推荐教材: 《生物化学简明教程》(第三版)罗纪盛编高等教育出版社人2001年《Biochemistry》 B.D.Hames 科学出版社2000年 主要参考书:《生物化学》(上、下册)沈同等编高等教育出版社2002年《医学生物化学》周爱儒编北京医科大学出版社2001年 课程代码:1F11035 课程名称:化工原理Principles of Chemical Engineering 学分:4 预修课程:《高等数学》、《物理》、《无机及分析化学》、《有机化学》、《物理化学》内容简介:本课程阐明了化工过程开发步骤和方法及化学工程学的基本观点和方法,主要讲述流体流动过程基本原理及其应用(流体测量、流体输送)、热量传递
生物科学专业个人求职简历
生物科学专业个人求职简历 生物科学专业个人求职简历生物科学专业个人求职简历 姓名:苏xx性别:女学历:本科工作年龄:1年出生年月:1990-4民族:汉族籍贯:xxxx登记时间:2011-12-239:16:33 最高学历:本科毕业学校:xx医学院所学专业:生物科学掌握外语:英语政治面貌:共青团员登记时间:2011-12-239:16:33 教育经历: 2005年08月至2008年06月xx县第三中学 2008年09月至2012年05月xx医学院 工作年龄:1年能力与专长: 2008-2009学期院三等奖奖学金、院文娱先进个人、优秀学生 英语四六级证书,口语三级 xx省普通话二级甲等“2009海洋生态文明(xx)国际论坛”优秀志愿者联合国开发计划署(UNDP)/全球环境基金(GEF)资助的《xx西门岛海洋特别保护区红树林及湿地生态系统保护与综合管理》项目活动志愿者水产养殖和健康管理结业证书 工作经历: 2008年7月至2008年8月xx省海洋水产养殖研究所办公室助理个人简介: 2008-2009年,加入校青年志愿者和阳光志愿者服务社,去敬老院打扫,帮老人量血压,募捐,以及支援西部等宣传活动等等。 2009.7-8,暑期培训班当老师 2009.10-2010.1年,大学时代当服务生 2010.7-2010.8,
xx省海洋水产养殖研究所做办公室助理 2008-2012期间,一直在做家教 希望工作类型壹:涉外业务/外贸希望工资待遇:面议希望工作类型:全职希望工作地点:xx县意向提交时间:2013/3/1 其它工作要求:我的自荐书:希望工作类型贰:办公室文员/电脑打字员希望工资待遇:面议希望工作类型:全职希望工作地点:xx县意向提交时间:2013/3/1 其它工作要求:我的自荐书:希望工作类型叁:检验/化验/测试员希望工资待遇:2000-3000元希望工作类型:全职希望工作地点:xx县意向提交时间:2013/3/1 其它工作要求:我的自荐书:
生物专业自我介绍
生物专业自我介绍 第一篇:生物专业自我介绍 生物专业自我介绍范文 我叫xxx,是安徽师范大学生命科学学院生物技术专业2014届毕业生。 大学四年,我始终严格要求自己,全方面锻炼和发展自我。不断的加强与人沟通交流的能力并取得了很大的提高,积极的参加实践活动,大大的提高了我的实践能力。学习上,我踏实努力,以优秀的成绩通过了所有课程,连续三年获得三好学生的称号并获得二等奖学金,专业成绩名列前茅。实验操作能力在大学期间得到很大的提高,能够顺利地独立完成实验课程。同时,我广泛学习了英语、计算机等各方面知识,先后通过了国家英语四、六级考试,国家计算机水平考试二级,三级,能熟练操作计算机常用软件。我有着很强的学习能力和适应新环境的能力,较强的团体协作能力和实践能力。 我的学校安徽师范大学是安徽省省属重点大学,具备师范类及非师范类专业。我所在专业生物技术专业是非师范类的,侧重于生产应用,所学习课程是面向生物制药公司,发酵类公司,以及研发部门的。除学习了较宽广的生物基础知识外,我对生物技术的四大工程课程还有着较深入的学习。 第二篇:生物专业英文自我介绍
mynameisxxxx.iamanundergraduateofhenannormaluniversity,ma joringinbiotechnology.inthepastthreeyears,ididquiteagoodjobin mystudyandhadacquiredsystemicknowledgeofmymajor.besides,ipass edcet- 6andhaveobtainedthesecondprizeforbandcinthe2014and2014nationa lenglishcontestforcollegestudentstwice.ihavegoodcommunicative skillandstrongteamspiritwhichwillbeagreathelpformetofulfillmy masterdegreecourses.withregardtomycharacter,i'dliketosaythati amoptimisticandeasy- going.besidesstudyienjoywalkingwhichmakesmehealthyandmymindto ugh听. hefollowingismyresume.andtheencloseddocumentismyschoolrep ortofthepastthreeyears!ifishoulddelivertwoprofessor'recommend ationstoyou,iwillpostthemassoonaspossible.thanksforyourattent ion! 第三篇:生物专业英文自我介绍 生物专业英文自我介绍 mynameisxxxx.iamanundergraduateofhenannormaluniversity,ma joringinbiotechnology.inthepastthreeyears,ididquiteagoodjobin mystudyandhadacquiredsystemicknowledgeofmymajor.besides,ipass
生物科学专业简介
生物科学专业简介 一、培养目标 培养德、智、体、美全面发展,掌握生物科学的基本理论、基本知识、基本技能;能在科研机构、高等学校从事科研和教学工作,能在企业、事业和行政管理部门从事与生物科学有关的应用、研究、技术开发和管理等工作的应用型、复合型高级专门人才。 1.学历层次:四年本科,理学学士。 2.掌握的知识:生物科学的基本理论、基本知识、基本技能 3.具备的能力:能在科研机构、高等学校从事科研和教学工作,能在企业、事业和行政管理部门从事与生物科学有关的应用、研究、技术开发和管理等工作。 4.优势和特色:主要学习生物科学方面的基本理论和基本知识,接受从事生物学研究和技术应用的基本训练,具有研究、开发和应用生物科学各领域的基本能力。毕业实习根据学生的实际情况(兴趣爱好及就业)实行多样化培养。实行3+1培养模式,理论学习3年,最后1年为科研训练和试验操作能力的培养;开办生物科学实验班,对实验班的学生单独设定培养方案,部分专业基础及专业课进行双语教学,小班授课。定期聘请国内外一流专家学者与学生交流,全面培养学生科技创新素养;加强实践教学,提高学生的科研素养。采用一对一的导师制模式,从大一开始进行系统的学术研究能力培养。提供奖学金、创造条件提供国内外研修和交流机会;营造一流学术环境与氛围。 二、学习经历 1.主要基础课 (1)理论课 植物学、动物学、微生物学、生物化学、动物生理学、植物生理学、细胞生物学、分子生物学、发育生物学、遗传学、生物统计学。 (2)实验课
植物学实验、动物学实验、遗传学实验、细胞生物学实验、高级生化研究技术、动物生理学实验、植物生理学实验、微生物学实验技术等。 2.主要专业课: (1)理论课:发酵工程原理、基因与蛋白质组学、细胞工程、基因工程。 (2)实验课:分子生物学大实验Ⅰ、分子生物学大实验Ⅱ、发酵工程原理实验、细胞工程实验、综合实验操作。 3.主要实践项目: 入学教育、军训;毕业教育;专业及两课社会实践;毛泽东思想、邓小平理论和“三个代表”重要思想概论课程论文;植物学实习;发酵工程原理实习;科研训练与课程论文;毕业实习;毕业论文;创新教育。 三、就业情况: 近年来毕业生去向:攻读硕士研究生(约占40%);其余为考取公务员及相关生物技术企业包括葡萄酒、啤酒酿造,制药,食品加工,生物公司等行业。 就业前景:主要到科研机构或、高等学校从事科学研究或、教学工作或在工业、医药、食品、农、林、牧、渔、环保、园林等行业的企业、事业和行政管理部门,从事与生物技术和生物科学有关的应用研究、技术开发、生产管理和行政管理等工作。
生物工程专业主要课程简介
生物工程专业主要课程简介 1F12755 基础生物学学分:4.0 Basic Biology 预修课程:无机及分析化学、有机化学 内容简介:本课程主要介绍了什么是生命、生命科学的发展和研究方法、生命的物质基础、生命的结构基础-细胞、生命活动及生命的形态与建成,其中包括植物的生命活动及生命的形态与建成,被子植物的有性生殖和发育,动物的组织、消化和吸收,动物的循环和呼吸,动物的排泄和水盐平衡,动物的体内调节,动物的行为,动物的生殖和发育等。本课程还介绍了生命活动的维持——能量的获取与转换、生命的遗传与变异、生物体的防卫系统、生命的信息传递和处理、生命起源和生物进化、生物的分类和分界、生物与环境。 推荐教材:《现代生物学》,胡玉佳主编,高等教育出版社,1999年 主要参考书:《普通生物学——生命科学通论》,陈阅增主编,高等教育出版社,2004年 《Biology》(6th ed),Raven and Johnson 主编,McGraw-Hill Science ,2001年 《生物学原理》(影印版),Eldon D. Enger 主编,科学出版社,2004年 1F10693生物化学学分:4.0 Biochemistry 预修课程:无机及分析化学、有机化学、基础生物学 内容简介:本课程主要介绍生物化学的发展历史、生物化学研究中的重要化学概
念、组成蛋白质的20种天然氨基酸、蛋白质的化学组成、蛋白质的空间结构、几种重要蛋白质的结构与功能关系、蛋白质研究的方法学、酶催化原理、核苷酸和核酸的结构与功能、脂类的结构与功能、生物膜的化学组成、结构和跨膜运输原理、碳水化合物的结构与功能、生物能量学、生物分子的分解合成代谢和遗传信息的复制及表达调控机制。 推荐教材:《生物化学简明教程》(第三版),罗纪盛编高等教育出版社,2001年 《Biochemistry》,B.D.Hames,科学出版社,2000年 主要参考书:《生物化学》(上、下册),沈同等编,高等教育出版社,2002年《医学生物化学》,周爱儒编,北京医科大学出版社,2001年 1F11035 化工原理学分:4.0 Principles of Chemical Engineering 预修课程:高等数学、物理、无机及分析化学、有机化学、物理化学 内容简介:本课程阐明了化工过程开发步骤和方法及化学工程学的基本观点和方法,主要讲述流体流动过程基本原理及其应用(流体测量、流体输送)、热量传递过程基本原理及其应用(气体的吸收和液体的精馏过程计算),使学生在理解基本原理和方法的同时提高实际应用能力。 推荐教材:《化工原理》,南京化工大学编著,化学工业出版社 主要参考书:《化工原理》,华东化工学院编著,化学工业出版社 《化工原理实验》,南京化工大学编著,东南大学出版社 《化工原理》,蒋维钧等编著,清华大学出版社 《化工原理学习指导》,匡国柱主编,大连理工出版社
一些国外生物技术公司的简介
一些国外生物技术公司的简介 QIAGEN: 德国著名的试剂公司,该公司的核酸分离纯化系列基于多项专利技术,纯度高,产量高,快速方便,品种齐全,为世界知名品牌。其大多数产品以即用型试剂盒形式提供,随产品有非常详细的操作技术手册。此外,还提供优质的传染系统,RT/PCR反应系统(包括高特异性的逆转录酶及热启动的Taq酶),蛋白及多肽表达、纯化、检测分析系统。 Ambion: 该公司始终致力于开发RNA相关产品,在RNA的分离纯化、RACE、RT-PCR 方面有许多非常有特色的产品,并提供优质的Northern杂交体系,和高效的体外翻译体系。如今,其产品在RNA研究领域已经成为研究人员的首选品牌。 Invitrogen: 该公司成功地提供了PCR产物快速克隆试剂盒,及与之配套的系列产品,包括高效转染和转化试剂、高效感受态细胞、全面的原核及真核基因表达系统、酵母双杂交系统等多种特色产品。大大便利了分子克隆的全过程操作。其成功并购了Gibco/BRL,Novex,Research Genetics等知名公司,产品覆盖更为广泛。 Clontech: 现已成为B.D.公司旗下分子生物学主力舰。该公司的cDNA试剂盒、荧光蛋白报告基因系统、酵母双杂交系统、基因Array产品是独具特色的产品,其中一些试剂盒(GFP、Tet Off &On等)获得过多次大奖。Clontech公司聚集了一大批优秀的科学家,在分子研究的各个领域开发出了许多设计思路独特,快捷便利的试剂产品,紧跟科学前沿。 Strategene: 该公司的特色产品包括:预制基因文库、定制文库、文库构建产品、感受态细胞、高效转染试剂、点突变试剂盒、PCR仪及多种专利产品,在分子生物
SCARA机器人的运动学分析
电子科技大学 实验报告 学生姓名: 一、实验室名称:机电一体化实验室 二、实验项目名称:实验三SCARA 学号: 机器人的运动学分析 三、实验原理: 机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。 各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程) 为: n x o x a x p x 0T40T1 11T2 22T3 d3 n y o y a y p y ( 1-5)3T4 4= o z a z p z n z 0001 式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0} 的位姿,是机械手运动分析和综合的基础。 式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4 o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4 o z0 , a x0 , a y0 , a z1 p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3 机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1 A arctg 1 A 2 l 12 l 22 p x 2 p y 2 arctg p x 式中:A p x 2 ; p y 2l 1 p y 2 2)求关节 2: 2 r cos( 1 ) arctg ) l 1 r sin( 1 式中 : r p x 2 p y 2 ;arctg p x p y 3). 求 关节变 量 d 3 令左右矩阵中的第三行第四个元素(3.4)相等,可得: d 3 p z 4). 求 关节变 量 θ 4 令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即: sin 1 n x cos 1n y sin 2 cos 4 cos 2 sin 4 由上式可求得: 4 arctg ( sin 1 n x cos 1 n y )2 cos 1 n x sin 1 n y 四、实验目的: 1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法; 2. 掌握 SCARA 机器人的运动学方程的建立; 3. 会运用方程求解运动学的正解和反解; ( 1-8) ( 1-9) ( 1-10 )
六轴运动机器人运动学求解分析
六轴联动机械臂运动学及动力学求解分析 V0.9版 随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。 作者朱森光 Email zsgsoft@https://www.360docs.net/doc/0c4589691.html, 完成时间 2016-02-28
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。本文内容的正确性经过笔者编程仿真验证可以信赖。 2机器建模 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。 3运动学分析 3.1齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 =cosθ0 s0 = sinθ0 //c0 R0 =[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0 s1 c1 0 0
牛津大学生物科学专业
https://www.360docs.net/doc/0c4589691.html, 牛津大学生物科学专业本科包括了生物科学和生物技术两个专业方向,这些专业学科主要培养学生学习生物科学技术方面的基本理论、基本知识,学生将受到应用基础研究和技术开发方面的科学思维和科学实验训练,进而具有较好的科学素养及初步的教学、研究、开发与管理的基本能力。立思辰留学360介绍说,其核心课程主要包括了动物生物学、植物生物学、微生物学、生物化学、遗传学、细胞生物学、分子生物学、普通生态学等学科;必修课程则包括无机及分析化学、有机化学、大学数学、大学物理学、生物统计学、发育生物学、生物技术概论、进化生物学等。 牛津大学生物科学专业申请学术条件 ·A-levels: A*AA - The A* must be in a science or Mathematics ·Advanced Highers: AA/AAB ·IB: 39 (including core points) with 7 in HL Mathematics or a science ·或其他同等学历 在可能的情况下,您的成绩也会被特殊考虑。 申请人需要具有生物学(或人类生物学)IB级别高级,或同等级学历。我们希望您在所选的科学课程中,已经取得并通过了以上要求。 高中毕业文凭、中国大学入学考试或高考成绩对考生申请来说是不够的。
https://www.360docs.net/doc/0c4589691.html, 牛津大学生物科学专业申请英语要求 立思辰留学360介绍说,牛津大学的所有教学都是用英语进行的(除了一些特定语言的教学),教师必须确信你有足够流利的书面和口语来应付你的课程。因此,所有非英语母语申请者必须满足下列条件之一: 雅思成绩:总分为7.0分(每个单项至少有7.0分)。 托福(纸质):总分为600分,写作成绩为5.5分。 托福(互联网):总分为110,听力22,阅读24,口语25,写作24。 剑桥英语:高级,也被称为高级英语证书(CAE),A级,如果在2015年1月之前获得,至少185分。 剑桥英语:熟练,也被称为英语水平证书(CPE),B级,如果在2015年1月之前获得,至少185分。 英语O-level:B级 国际学士学位标准(SL):英文5分(A或B语言)。 欧洲文凭课程:英语成绩70%。
运动学测量方法
各位同学,大家早上好,今天我们来继续学习运动技术分析与诊断这门课程,在学习本节课之前,我们先来回顾一下,上节课学习的人体运动的运动学分析的主要内容。 复习:一、人体关节的相关概念 二、人体关节运动的基本形式 三、人体运动链的分类 四、人体运动的自由度 一、人体关节的相关概念 关节:骨与骨以结缔组织相连结构成关节。根据连结组织的性质和活动情况,关节可分为不动关节(韧带联合、软骨结合和骨性结合)、动关节(肩、肘、腕、髋、膝、踝关节)和半关节(耻骨联合)。 二、人体关节运动的基本形式 1)角度运动 邻近两骨间产生角度改变的相对转动,称为角度运动。通常有屈、伸和收、展两种运动形态。 2)旋转运动 骨绕垂直轴的运动称为旋转运动,由前向内的旋转称为旋内,由前向外的旋转称之旋外。 三、人体运动链的分类 开放运动链末端呈游离状态,它的某一关节固定,其余各关节产生运动。 如果运动链首尾相连,形成闭合状态,末端无游离的环节,称为闭合运动链。 四、人体运动的自由度 假如物体不受任何限制(约束),它可以在三度空间运动,也既是相对于三个相互垂直轴的平动及绕三个轴的转动,物体有六个自由度。 当把物体某一点固定时,其自由度为三个,这时不能产生平动,只能以三个坐标轴为轴发生转动(可把原点放在固定点)。 当物体的某两点固定时,只有一个自由度,既以两点的连线为轴的转动。
当物体上任意三点固定时,则自由度为零,不产生任何方向的平动和转动。 在前面运动技术分析与诊断中我们所讲的是一些运动学、动力学和肌肉力学的一些理论知识,通过上半程的学习对技术分析有个理论上的知识,在后面的学习中将主要进行的是一些实际的应用操作。那么,今天所要学习的就是运动技术分析与诊断的工作环节以及现场数据采集。 第六章运动技术分析与诊断的工作环节及现场数据采集 第一节运动技术数据的意义 运动技术数据是指从人体运动过程中采集到得能够准确描述其运动状态的相关性息。人体运动与时间、空间相关的信息称之为运动学数据;人体运动与作用力、时间相关的信息称之为动力学数据。 一、运动学数据对运动技术的意义 运动学数据包括关节位置和关节角度、位移和角位移、速度和角速度、加速度和角加速度。 1)关节位置和关节角度 人体关节位置和关节角度数据可以准确描述人体运动的姿势。 A.关节位置 人体运动系统的支架是由骨骼和关节组成的一种链状结构,当这种链状结构的枢纽位置(关节位置)发生变化时,便会引起整个支架的形态发生变化。因此,人体运动时身体姿势可以看成是由各个关节在空间位置决定的。 图中显示了关节位置与动作姿态相关的情况。从图中可以看出,当人体任何一个关节点的位置发生变化时,都必然会引起动作姿态发生变化;反之,当人体动作姿态发生变化时,也必然会伴随关节位置的变化。 B.关节角度 人体每个关节的角度决定相邻两个运动环节之间的相互关系,关节角度数据直接描述动作姿态中每个关节的伸展和弯曲状况。在分析评价运动技术姿势时,关节角度也是一个重要的指标。 2)位移和角位移 A.位移 人体动态运动过程可以看成是由一系列有序的静态姿势所组成,当人体从一个姿势连续变化到另一个姿势时,肢体各部位的位置会发生一系列的连续变化,位置变化的距离称之为位移。 我们以100米途中跑时人体总重心的位移情况为例,通过运动员途中跑的影像资料求出途中跑每个瞬时的总重心位置坐标,便可以在坐标中做出途中跑人体