FANUC D系统零点设置
零点修改方法把写参数“0”改为“1”
1、按SYSTEM键如图位置。
3、进参数1815
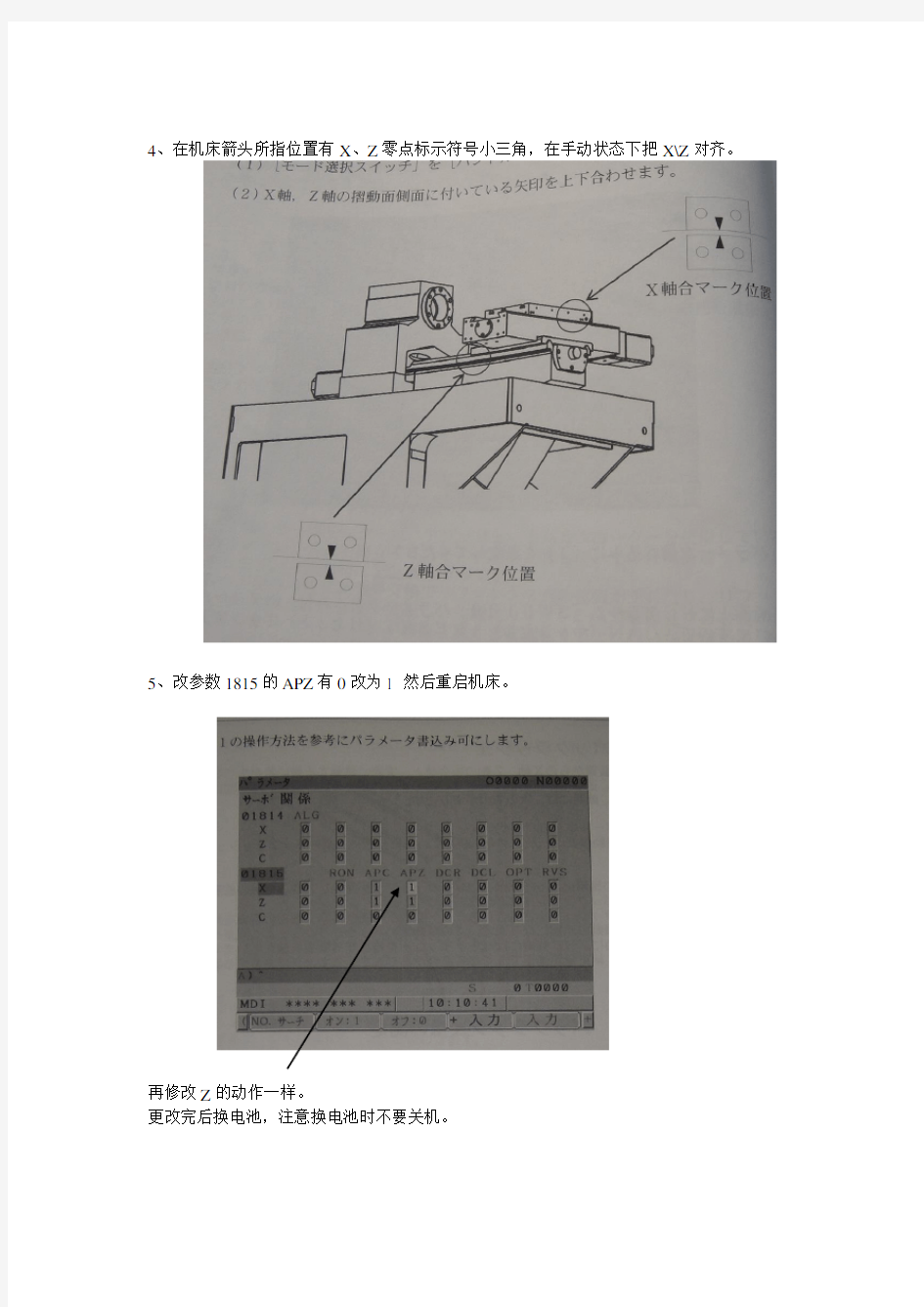
4、在机床箭头所指位置有X、Z零点标示符号小三角,在手动状态下把X\Z对齐。
5、改参数1815的APZ有0改为1 然后重启机床。
再修改Z的动作一样。
更改完后换电池,注意换电池时不要关机。
YTC定位器YT-1000R (C)调节
使 用 手 册 (YT-1000R/角行程) Young Tech Co., Ltd.
1. 简介 电-气阀门定位器YT-1000R是一种从控制器或控制系统中接受4~20mA电流信号, 并向气动执行机构输送空气来控制阀门开度的装置。 2. 特征 - 在5~200Hz范围内无共振现象。 - 不用更换零件只需简单操作即可进行1/2范围内的分程控制。 - 零调节和量程调节非常简单。 - 正作用和反作用,单作用和双作用之间可方便转换。 - 反馈杆连接非常简单。 - 反应速度快而准确。 - 空气消耗量小,经济性好。 - 在小型执行器也可利用先导阀的节流孔来防止振动现象。 3. 参数 形式单作用双作用 输入信号4~20mA DC 阻抗250±15 Ohm 输入压力 1.4~7kgf/? (20~100Psi) 行程0~900 气源接口PT (NPT) 1/4 压力表接口PT (NPT) 1/8 电源接口PF 1/2 (G 1/2) 防爆等级ExiaIIBT6, ExdmIIBT5, ExdmIICT5 防护等级IP 66 环境温度-20℃~70℃(标准) 直线性±1% F.S ±2% F.S 滞后度1% F.S 灵敏度±0.2% F.S ±0.5% F.S 重复性±0.5% F.S 空气消耗量3LPM (Sup=1.4kgf/? 20Psi) 流量80LPM (Sup=1.4kgf/? 20Psi) 材质压铸鋁 重量 2.8kg
4. 订货编制 :YT-1000R 型号动作形式防爆等级反馈杆喷嘴连接形式环境温度选用配件1 选用配件2 YT-1000R S单作用m ExdmIIBT5 1 M6×40L 1小于90?1 PT S -20℃~70℃0标准指示器0无D双作用c ExdmIICT5 2 M6×63L 2 90~180?2 NPT H -20℃~120℃1圆顶指示器1 +PTM(内置) I ExiaIIBT6 3 M8×40L 3大于180?L -40℃~70℃2 +PTM9(外置) n不防爆4 M8×63L 3 +L/S(内置) 5 NAMUR 4 +L/S(外置) 5 +PTM+L/S(内置) <备注> ●以大气温度20℃,绝对压760㎜Hg,相对湿度65%为基准。 ●本产品的基本配置适用于耐压封闭防爆(ExdmⅡBT6)及容器保护等级IP66。 ●以单作用(Single Acting)为标准。 ●用量程调节旋扭可达到1/2范围内的分程控制。 ●标准类型以外的产品请另询问。 5. 结构图 6. 动作原理 为了改变阀门的位置增加输入电流。由①力矩马达发生力, 使②挡板和③喷嘴之间距离增加从而喷嘴背压急剧减小。 ⑤阀芯向上移动,同时⑦气门被打开,把出口1导管空压送到 ⑩执行机构。增加?执行机构腔内的压力而使?执行机构轴开始旋转。 随着?执行机构轴开始旋转,与反馈杆连接的反馈弹簧被拉伸。
FANUC数控机床机械原点的设置及回零常见故障分析
FANUC数控机床机械原点的设置及回零常见故障分析 当前大多数数控机床均采用通过减速档块的方式回零,但谊方式在日常使用中故障率却艰高,有时甚至出现机械原点的丢失。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对该类数控机床常见回零故障的各种形式式进行了分析与总结。 机械原点是机床生产厂家在生产机床时任机床上设置的一个物理位置,可以使控制系统和机床能够同步,从而建立起一个用于测量机床运动坐标的起始位置点,通常也是程序坐标的参考点。大多数数控机床在开机后都需要回零即回机械原点的操作。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对此类数控机床常见回零故障的各种形武进行了分析与总结。 1 机械原点设置 1.1 机械原点丢失的原因 台中精机生产的VCENTER-70加工中心采用增量编码器作为机床位置的检测装置。系统断电后,工件坐标系的坐标值就会失去记忆,尽管靠电池能够维持坐标值的记忆,但只是记忆机床断电前的坐标值而不是机床的实际位置,所以机床首次开机后要进行返回参考点操作。而当系统断电遇到电池没电或特殊情况失电时,就会造成机械原点的丢失.从而使机床回参考点失败而无法正常工作。此时机床会产生。#306 n轴电池电压0#的报警信息,并且还会产生机械坐标丢失报警。#300第n轴原点复位要求”(n代指X、Y、Z)。 1.2 机械原点的设置 在通常情况下,设置数控机床机械原点的方法主要有以下两种:1)手动使X、Y、Z三轴超程印利用三轴的极限位置选择机械原点。2)利用各坐标轴的伺服检溯反馈系统提供相应基准脉冲来选择机床参考点即机械原点。由于第一种方法是机床厂家通常建议的也是较为简便和实用的方法.因此本文在此详细介绍第1种做法。以X轴为例,设置步骤如下: (1)将机床操作面板上的方式选择开关设定为MDI方式。 (2)按下机床MDI面板上的功能键[OFS/SET]数次,进入设定画面。 (3)将写参数中的0改为1,由此,系统进入了参数可写状态。此时机床出现。SWO 100参数写入开关处于打开”的报警信息。忽略这条报警信息,设置完参数后改回为0即可。 (4)按下功能键lsYSTEM】,进入系统参数键面。通过参数搜索找到参数1815(如表l 所示)通常情况下,X轴的#4APZ或#5 APC会显示为0,若不为0就将其设定为0。 (5)找到参数1320,此参数为存储各轴正向行程的坐标值。将其X轴的正向行程设定为最大值999999。目的是让X轴的正向软限位位置值大于其正向硬限位的位置值。 (6)将方式选择开关打到手轮方式,然后摇动手轮使工作台碰及X轴的正向限位档块,此时机床会出现“#500+X过行程”报警。
ABB定位器整定
ABB定位器调校步骤 说明:1.调校步骤 2.1接通气源,检查减压阀后压力是否符 合执行器的铭牌参数要求。 2.2接通4~20mA输入信号。(定位器的工作电源取自输入信号) 2.3检查位置反馈杆的安装角度: 2.3.1按住MODE键。 2.3.2并同时点击↑或者↓键,直到操作模式代码1.3显示出来。 2.3.3松开MODE键。 2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度 2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围: 直行程应用范围在-28°------+28°之内。 角行程应用范围在-57°------+57°之内。 全行程角度应不小于25° 2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整。反复调整两个终端位置的角度直到满足要求为止。 2.4切换至配置功能级 2.4.1 同时按住↑或者↓键 2.4.2 点击ENTER键 2.4.3 等待3秒钟,计数器从3计数到 2.4.4↑或者↓键4 程序自动进入P1._配置栏。 2.5使用↑或者↓键选择定位器安装形式为直行程或角行程 角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器 直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器。 我厂采用的ABB执行器为直行程安装形式,在参数P1.0里面选择:LINEARC(直行程) 2.6启动自动调整程序: 2.6.1 按住MODE键。 6.2 并同时点击↑键一次或多次,直到显示出 2.6.3 松开MODE键。 2.6.4 按住ENTER键3秒直到计数器倒计数到0 2.6.5 松开ENTER键,自动调整程序开始运行。 2.6.7 自动调整顺利结束后显示器显示“COMPLETE”,点击一下ENTER表示确认 在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。也可以人为的强制中断自动调整程序 2.7如有必要,进入“P1.2”调整控制偏差带(死区) 2.8如有必要,进入“P1.3”测试设定效果。
加工中心的基本操作
加工中心教案 一.主轴功能及主轴的正、反转 主轴功能又叫S功能,其代码由地址符S和其后的数字组成。用于指定主轴转速,单位为r/min,例如,S250表示主轴转速为250r/min. 主轴正、反转及停止指令M03、M04、M05 M03表示主轴正转(顺时针方向旋转)。所谓主轴正转,是从主轴往Z正方向看去,主轴处于顺时针方向旋转。 M04表示主轴反转(逆时针方向旋转)。所谓主轴反转,是从主轴往Z正方向看去,主轴处于逆时针方向旋转。 M05为主轴停转。它是在该程序段其他指令执行完以后才执行的。 如主轴以每分钟2500转的速度正转,其指令为:M03 S2500。 二.刀具功能及换刀 刀具功能又叫T功能,其代码由地址符T和其后的数字组成,用于数控系统进行选刀或换刀时指定刀具和刀具补偿号。例如T0102表示采用1号刀具和2号刀补。 如需换取01号刀,其指令为:M06 T01。 三.机床坐标系及工件坐标系 机床坐标系:用机床零点作为原点设置的坐标系称为机床坐标系。 机床上的一个用作为加工基准的特定点称为机床零点。机床制造厂对每台机床设置机床零点。机床坐标系一旦设定,就保持不变,直到电源关掉为止。 工件坐标系:加工工件时使用的坐标系称作工件坐标系。工件坐标系由CNC 预先设置。 一个加工程序可设置一个工件坐标系。工件坐标系可以通过移动原点来改变设置。 可以用下面三种方法设置工件坐标系: (1)用G92法 在程序中,在G92之后指定一个值来设定工件坐标系。 (2)自动设置 预先将参数NO。1201#0(SPR)设为1,当执行手动返回参考点后,就自动设定了工件坐标系。
(3)使用CRT/MDI面板输入 使用CRT/MDI面板输入可以设置6个工件坐标系。G54工件坐标系1、G55工件坐标系2、G56工件坐标系3、G57工件坐标系4、G58工件坐标系5、G59工件坐标系6。 工件坐标系选择G54~G59 说明: G54~G59是系统预定的6个工作坐标系(如图5.10.1),可根据需要任意选用。 这6个预定工件坐标系的原点在机床坐标系中的值(工件零点偏置值)可用MDI方式输入,系统自动记忆。 工件坐标系一旦,后续程序段中绝对值编程时的指令值均为相对此工件坐标系原点的值。 G54~G59为模态功能,可相互注销,G54为缺省值。
SEW零点设置方法
SEW伺服电机零点设置方法 1.打开软件,连接变频器,打开shell,双击Application目录下的Extended positioning via bus (图1),打开调试软件界面(图2)。 2.首先使变频器X13接口DI00电源断开,把monitor模式切换成control模式,此时 可以通过SEW软件手动模拟外部总线发送的控制字。 3.设置P01控制字为0A06(P01 control word 2)(图3),此时控制字为手动jog模 式,正方向转动 P02、03 不需要设置 P04 设置速度(建议100以下) P05 为加速 Ramp(建议6000ms) P06 为减速Ramp (建议 6000ms) 4.手动设置控制字和控制参数后,点击SendPA 按钮,此时所有手动设置参数被传送 到变频器,伺服电机开始移动。 5.设置P02控制字的第二位(Enable/Rapid stop)或者第三位(Enable/Stop),然后 点击SendPA按钮,可以停止电机转动。。(建议用Enable/Stop) 6.紧急情况:可以按工位的急停按钮或者直接打开安全门,此时可以断开变频器的使 能,直接使电机停止运转。 7.电机反转时,P02控制字设置为:0C06,其余操作相同。 8.手动移动伺服电机到零点位置,设置P02控制参数为1100,点击SendPA按钮,即 可把当前位置设为零点参考位置(图4)。 9.零点设置完成后,把control模式更改为monitor模式。
具体可以参考SEW资料: MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf 1.打开软件调试界面 图1
AMF零点定位系统产品说明书
一、概述: 1、产品名称:AMF 零点定位系统及附件 2、产品型号:K10.3,K20,K20.3 二、产品结构 1、锁紧钢珠 2、安装螺栓 3、螺纹销(辅助零点定位单元的安装,未在图中标出) 4、螺纹销,用于不使用自动除屑的应用 5、螺纹销,用于使用自动除屑的应用 6、安装工具 AMF零点定位系统使用说明书
三、产品安装及使用 (一)零点定位接头凹头的安装 不要讲安装工具⑥去掉 去掉保护橡胶圈 清洁安装孔,及安装表面,并涂入润滑 脂,将零点定位单元凹头装为安装孔, 并安装平 旋紧安装螺栓旋紧螺栓时使用扭矩扳手,M6,扭矩8Nm拆卸安装工具⑥
将螺纹销④或⑤旋入零点定位接头凹头内孔底部的螺纹孔,并用适合于不锈钢的胶粘结。 (二)零点定位接头凸头的安装 1、需要更换的夹具托盘 2、紧固螺栓 3、零点定位接头凸头 4、扭矩扳手K20M12扭矩120Nm 零点定位接头凸头(1) 单向定位接头凸头(2) 紧固定位接头凸头(3) K10 M8 34Nm 扭矩
?????????? ??????????а?????? ?????????;?
加工中心对刀原理及方法
加工中心对刀原理及方 法 -CAL-FENGHAI.-(YICAI)-Company One1
一线员工职业技能等级鉴定 申报论文 (高级技师) 题目:数控加工中心刀具对刀原理方法及其应用! 单位: 姓名: 申报工种: 2016年4月18日
摘要 数控加工操作中的对刀好坏不仅直接影响到加工零件的精度,还会影响数控机床的操作。对刀的过程牵涉到一系列的步骤,在实际操作中往往会出现一些具体的问题,因此通过对数控加工中心对刀的基本原理、对刀的方法并结合具体的数控加工中心的操作特点对对刀方法进行了阐述。 关键词:数控加工中心;对刀原理;对刀方法
目录 摘要 ........................................................................................................... 错误!未定义书签。绪论 (4) 一、对刀基本原理 (5) 二、对刀基本方法及运用 (5) 、用对刀探头对刀 (6) 用机外对刀仪对刀 (6) 用对刀器对刀 (7) 用试切法对刀 (8) 结论 (11) 参考文献 (12)
绪论 数控加工操作中的对刀好坏不仅直接影响到加工零件的精度,还会影响数控机床的操作。当工件坐标系确定之后,还要确定刀位点在工件坐标系中的位置。也就是确定工件坐标系与机床坐标系之间的关系,要让刀具在数控程序的控制下使加工对象相对于定位基准有正确的尺寸关系。由于数控机床所用的刀具各种各样,刀具寸也极不统一。在编制加工中心数控程序时,一般不考虑刀具规格及安装位置,加工前由操作者通过对刀将测出的刀具在主轴上的伸出长度及其直径等补偿参数输入数控系统,进行刀具补偿,通常把这一过程称为对刀。对刀的过程牵涉到一系列的步骤,如对刀基本原理、对刀方法的选择和对刀参数的设置等等。在实际操作中往往会出现一些具体的问题,因此通过数控加工中心对刀的基本原理、对刀的方法并结合具体的数控加工中心的操作特点对对刀方法进行了阐述。
fanuc系统数控车床设置工件零点常用方法
Fanuc系统数控车床设置工件零点常用方法 1.直接用刀具试切对刀 1.用外园车刀先试车一外园,记住当前X坐标,测量外园直径后,用X坐标减外园直径,所的值输 入offset界面的几何形状X值里。 2.用外园车刀先试车一外园端面,记住当前Z坐标,输入offset界面的几何形状Z值里。 2.用G50设置工件零点 1.用外园车刀先试车一外园,测量外园直径后,把刀沿Z轴正方向退点,切端面到中心。 2.选择MDI方式,输入G50 X0 Z0,启动START键,把当前点设为零点。 3.选择MDI方式,输入G0 X150 Z150 ,使刀具离开工件进刀加工。 4.这时程序开头:G50 X150 Z150 …….。 5.注意:用G50 X150 Z150,你起点和终点必须一致即X150 Z150,这样才能保证重复加工不 乱刀。 6.如用第二参考点G30,即能保证重复加工不乱刀,这时程序开头G30 U0 W0 G50 X150 Z150 7.在FANUC系统里,第二参考点的位置在参数里设置,在Yhcnc软件里,按鼠标右键出现对话框, 按鼠标左键确认即可。 3.用工件移设置工件零点 1.在FANUC0-TD系统的Offset里,有一工件移界面,可输入零点偏移值。 2.用外园车刀先试切工件端面,这时Z坐标的位置如:Z200,直接输入到偏移值里。 3.选择“Ref”回参考点方式,按X、Z轴回参考点,这时工件零点坐标系即建立。 4.注意:这个零点一直保持,只有从新设置偏移值Z0,才清除。 4.用G54-G59设置工件零点 1.用外园车刀先试车一外园,测量外园直径后,把刀沿Z轴正方向退点,切端面到中心。 2.把当前的X和Z轴坐标直接输入到G54----G59里,程序直接调用如:G54X50Z50……。 3.注意:可用G53指令清除G54-----G59工件坐标系。 Fanuc系统数控车床常用固定循环G70-G80祥解 1.外园粗车固定循环(G71) 如果在下图用程序决定A至A’至B的精加工形状,用△d(切削深度)车掉指定的区域,留精加工预 留量△u/2及△w。 G71U(△d)R(e) G71P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)
零点定位系统
零点定位系统 一、零点定位系统的概念 在机械制造、测量、机床、机器人自动生产线领域中,基准是应用十分广泛的一个概念。机械产品从设计时零件尺寸的标注,制造时工件的定位,校验时尺寸的测量,装配时零部件的装配位置确定,以及机器工作时零件位置的确定,都要用到基准的概念。 基准 基准就是用来确定对象上几何关系所依据的点、线或面。 零点 在机械工业领域,我们把作为参照的基准统称为零点或零位。 如下图,设定工件的零点后,加工或测量目标的位置尺寸就变得非常方便了,无需每个尺寸都去找相对基准,这对于加工或测量有很大的帮助。 零点定位系统 在加工或测量时,首现必须确定工件的零点,然后再根据零点来进行加工或者测量。但是在加工时,零件往往不会一直保持不动的,需要从一个工序到另一个工序、从一台机床到另一台机床,或者不规则形状的零件不好确定零点,这就需要重新拖表找正零点,做很多的辅助
工作,造成大量的停机时间,降低了工作效率。 零点定位系统是一个独特的定位和锁紧装置,能保持工件从一个工位到另一个工位,一个工序到另一个工序,或一台机床到另一台机床,零点始终保持不变。这样可以节省重新找正零点的辅助时间,保证工作的连续性,提高工作效率。 二、零点定位系统的原理 采用专利夹头的锁紧模块(cylinder),能保证工件在装夹过程定位和锁紧同步完成 重复定位精度0.002mmm,最大锁紧力达到90000N。 三、零点定位系统的应用 汽车:发动机、汽车模具、齿轮箱、轮毂 机床:金属切削加工、设备配套、设备生产 航空:飞机发动机、飞机零部件 工程机械:挖掘机、推土机、压路机、起重机、凿岩机等 交通运输:高速列车 风电行业:风力发电 泵、阀:泵、阀制造 电机:电机生产 船舶:船舶制造 摩托车:摩托车生产 军工:军工生产、装备制造 自动化生产线:车身焊装线
零点定位系统应用报告
应用领域报告 作者:青岛英世齐商贸有限公司https://www.360docs.net/doc/1012953126.html, 对于夹具,最重要的是什么?夹持精度,夹持力,更换夹具的方便......这些是我们选择制作夹具时首先考虑到问题。 机床的操作工人大量的时间用来做什么?更换夹具(工件),重新定位。 为什么工人不喜欢小批量生产?因为更换夹具和重新设定机床非常麻烦。有时候花费很长的时间。如果做几件就要重新设定,真是一件让人烦躁的事情。 工人更换工装夹具时机床在做什么?大部分时间是无效空转的。对于昂贵的机床,这确实是个问题。我们非常希望能提高机床的使用效率而不是买更多的机床,我们必须为保持竞争力而降低成本。 中国的劳动力成本在持续上升,工厂因为薪金支出的增长而不得不涨价,除了购买更高档的机床,有没有代价比较低的降低成本的方法? 机床的更新换代是大趋势,加工中心越来越多地替代传统机床。那么原来的状况良好的传统机床都淘汰掉吗?有没有办法将传统机床简单改造就能与加工中心配合使用,而效率仍然很高呢? 以上问题在欧洲有了革命性的解决方案:AMF零点定位系统。 AMF零点定位系统操做如此简单,只要托盘或者工件上的接头大致对上定位器,接头就会自动找到路径和中心并滑入定位器!小工件如此,大工件也几秒钟搞定! 使用零点定位系统后,甚至可以节省90%的换装时间。并且,工件更换到夹具上是离线操作的,机床几乎没有空转的时间,机床的使用效率被大大提高了。对于小批量多品种的生产,效益就更为明显。 AMF零点定位系统的重复定位精度是0.005mm,定位精度非常高;而且AMF零点定位系统能够很好地减振,使得加工精度更高,一致性更好。因为加工精度高,后续的某些工序甚至可以省略。独有的自清洁系统使得精度一直有保障,且免维护。 减振作用的另一个收获是:使用AMF零点定位系统后刀具的使用寿命突然延长了,这是降低成本的一个重要因素。 AMF零点定位系统有与众不同的特性:产品规格全,夹持力大。从K02到K40,我们适合从轻型到重型所有的需求。K02和K5的尺寸很小,但也有6kN和13kN的夹持力;K10夹持力达到25kN已经能满足一般机械加工的要求;K20和K40夹持力分别可达55kN和105kN,这是我们独有的适宜重型切削的产品,是重型切削领域不二的选择。
系统零点设置
FANUC系统原点设定 FANUC系统使用绝对编码器时,在提示电池电压低未及时更换新电池时就会造成原点丢失,必需重新设原点,并且在原点丢失后,第二参考点也需重新设定,否则换刀会出问题。 涉及的参数包括:1815(原点设定)、1320(正限位)、1321(负限位)、1241(第二参考点)。 1815号参数中可以看到APC(是否使用绝对编码器)、APZ(机械位置与原点位置是否重合)参数,在电池没电时,APC保持为1,APZ自动变为0。具体原点设定步骤如下: 1、在驱动器上先插上新电池。 2、先找到参数3299,(按下屏幕上的system键,然后上下翻页)这个 是程序锁。将最右边那一位改成0。(此时程序锁已经解除) 3、找到设定中,【写参数】这一项。将其修改为1.(此时可以修改程序 了) 4、【对于三轴机床将1320号、1321号X\Y\Z参数先记下来,然后将1320里面的值全改为99999999, 1321里面的值改为-999999999,这样在设原点时不会出现超程报警。】此步为非必须。
5、用手轮将X、Y、Z轴按原先回零时的方向移动,大概到原先原点位 置时,可以看着对应轴的负载表(在机床坐标系画面,按下显示屏右下方的向右箭头,然后选择监控就能看到各轴负载了),当对应轴负载呈增大趋势时,说明已到最大行程,把此点相对坐标清零,然后往回移动几毫米,如3mm。按这个方法就可以确定三个轴的原点位置。注意:Z轴的原点设定时要保证主轴下端高于机械手上端面。 6、将1815号参数的三个轴的APZ都改为1,一般改完一个轴后就会提 示要关机重启,可以不理会,直到三个轴改完再关机重启。重启后再检查下1815号参数,若APC、APZ都为1,说明原点已经设定好了。 (若原点未设定成功,可以先将三轴的APC、APZ先都改为0,关机重启后将APC改为1,然后关机重启后再将APZ改为1,最后关机重
电-气阀门定位器ZPD-2111d
电气阀门定位器的详细介绍 -- ZPD-2000(EP2000)电气阀门定位器 -- ZPD-2000(EP2000)电气阀门定位器与调节阀配套使用把调节器输出的信号转换成驱动调节阀的气信号,克服填料函与阀杆的磨擦力,克服介质压差对调节阀阀芯不平衡力,提高阀门的动作速度,可实现分程控制(段幅信号)可改变阀的作用方式可控制非标准操作压力的各种类型气动执行机构。 技术参数和性能: 基本误差:±1%(单作用)±2%(双作用) 回差:1%(单作用)2%(双作用) 死区:0.4%(单作用)0.2%(双作用) 额定行程:0~(10~100)mm 0~(50°~90°)角行程(转角行程) 气源压力:0.14~0.55Mpa 输出压力:0.02~0.5Mpa 耗气量: 单作用:450L/h 双作用:3600 L/h 输入信号: 4~20mA.DC 0~10mA.DC(可分程) 输出特性: 线性常规型:(等百分比非线性特殊型) 环境温度: -35℃~+80℃(本质安全型为-20℃~+60℃) 相对温度:5%~100% 防爆型式:隔爆型、本安型、普通型 输入阻抗:4~20mA.DC/300±10Ω(20℃时) 0~10mA.DC/1000±30Ω(20℃时) 气源接口:M10╳1(联接铜管为Ф6) 电源接口:M22╳1.5 壳体材料:铝合金 外型尺寸:203╳160╳105(mm) 重量:2.8kg 产品型号及规格: 型号防爆输入信气源压力输出压力M执行机输出行程耗气量
型式号 mA .DC Mpa pa (标准状 态) 构和范围(标准状 态) ZPD-20 00 (EP20 00) 2111 d 隔爆 e 增安 i 本安 4~20 0.14 0.02~0.1 气动薄 膜式 (单作 用) 直行程 10~100m m 或 角行程 0~90° 等 (直连 式) 450L/h 3600L/h 2112 0.25 0.04~0.2 2113 0.30 ; 0. 34 0.08~0.2 2121 4~12 12~20 0.14 2122 0.25 0.04~0.2 2123 0.30 ; 0. 34 0.08~0.2 2131 0~10 0.14 0.02~0.1 2141 0~5 5~10 0.25 0.04~0.2 2211 4~20 0.55 0~0.5 气动活 塞式 (双作 用) 2221 4~12 12~20 2231 0~10 例: EP1111d:表示直行程单作用,配气动薄膜式输入信号:4~20mA.DC,输出压力0.02~0.1MPa的隔爆型定位器。 1211i:表示双作用,配气动活动赛式(气缸式)输入信号:4~20mA.DC,输出压力0.05MPa的本安型定位器。 订货时请写明: 1、型号, 2、输入信号范围, 3、供气压力, 4、防爆结构等级, 5、行程方式, 6、配减压器, 7、附件, 8、配执行机构型号。 目前智能电气阀门定位器尤其带位置回讯一体化的应用越来越广泛,在实际使用中遇到个一个非常棘手的问题。定位器在全开或全关位置时即当DCS调节器(或手操器)输出0%时,定位器经常会出现掉电现象而使其处于故障状态。所属阀门此时,一是回讯丢失,二是向故障状态动作。这种非正常情况已经严重威胁到了安全生产。造成这种现象的原因是什么?应如何避免?请教有经验者指点。 阀门定位器常见故障分析 气动调节阀在自动调节系统中是一个非常重要的环节。人们常把调节阀比喻为生产过程自动化的“手足”。由于生产过程的调节对象要求要求调节阀具有各种各样的特性,以满足生产工艺的需要。在调节阀的附属装置中,最主要、最实用的是阀门定位器。 现场使用阀门定位器的种类非常繁多,有气动阀门定位器、电气阀门定位器、有配薄膜执行机构的阀门定位器、有配活塞执行机构的阀门定位器、有力平衡式阀门定位器、有位移平衡式阀门定位器,阀门定位器的广泛使用,在生产过程中,难免会出现各种故障,为保质、保量、安全地生产,就必须及时排除定位器可能产生地一切故障。要排除阀门定位器地的故障,必须正确判断阀门定位器的那一个环节、那一个元件发生的故障。通常有如下两种故障分析法:一是根据阀门定位器的传递函数,对阀门定位器进行逐个环节,逐个元件的分析,这种对现场检修不太适用,但对于疑难问题的分析,却非常有效;二是根据检修者对故障的现象进行综合分析和判断,此种方法最适于现场检修。下面将阀门定位器可能产生的常见故障的起因分析如下:
加工中心设置零点两种方法
两种方法: A、对准标记设定参考点 在机床上设置对准标记,注意对于磨床使用倾斜轴控制功能的轴上不能使用本功能。 准备工作: a:1005#1设为1——各轴返回参考点不使用挡块方式 此时返回参考点就不需要使用减速信号*DEC。 b:1815#5设为1——使用绝对位置编码器 1815#4设为0——绝对位置编码器原点位置未确立 1006#5设为0——返回参考点方向为正向 c:切断NC电源,断开主断路器 d:把绝对位置编码器的电池连接到伺服放大器上 e:接通电源 自动检测编码器基准点(检测编码器的1转信号) (如果未进行此项操作继而进行参考点回零的话出现PS0090号报警) a:用手动或者手轮方式进给,让机床电机转动1转以上 b:断开电源再接通电源 设定参考点 a:JOG方式下对各轴手动移动,将机床移动到1006#5设定的反方向处,例如上面设的1006#5为0即返回参考点方向为正向,则将机床移至负向,如下图:b:按1006#5设定的返回参考点的方向移动机床,直至机床对准标记与参考点位置重合,当位置快要重合时使用手轮进给进行微调。 c:将1815#4设为1——绝对位置编码器原点位置已确立。 B、无挡块返回参考点 不需要安装限位开关和挡块 准备工作: a:1005#1设为1——各轴返回参考点不使用挡块方式 此时返回参考点就不需要使用减速信号*DEC。 b:1815#5设为1——使用绝对位置编码器 1815#4设为0——绝对位置编码器原点位置未确立 1006#5设为0——返回参考点方向为正向 c:切断NC电源,断开主断路器 d:把绝对位置编码器的电池连接到伺服放大器上 e:接通电源 自动检测编码器基准点(检测编码器的1转信号) (如果未进行此项操作继而进行参考点回零的话出现PS0090号报警) a:用手动或者手轮方式进给,让机床电机转动1转以上
yt500定位器说明书
YTC2500智能定位器安装及操作说明书 ※气路连接 ●连接定位器的输出与气动执行器的气缸 ●使用与定位器气源端口处标识的标准接口连接气源 ●气源连接口前方必须安装过滤器或带有过滤器的空气过滤减压阀,防止水 分、油污等异物渗入 ●确认定位器反馈杆动作方向与执行机构运行方向一致 ※电气连接 根据下列接线端子图以及设计要求进行相应的配线 接线端子名称接线方式 IN+ 电流输入 信号端子 DC4-20mA 负载等效电阻Max.410Ω IN- FG接地端子安全保护地 OUT+ 反馈信号端子 外接+24V供电反馈电流4-20mA OUT- ※调试步骤 1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求,供气压力范 围是0.14-0.7MPa(1.4‐7kgf/cm2),请不要超过这个范围使用;
2.接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线 制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路); 3.检查位置反馈杆的机械安装,拆下气缸锁定螺丝,并检查气源管路防止漏气; 4.手动方式检查执行机构动作, ●在运行模式下,按住
阀门定位器工作原理与故障维护
阀门定位器工作原理与故障维护 ※※※ 摘要:简要介绍阀门定位器的工作原理及日常故障维护。以海水淡化阀门定位器为例,通过阀门定位器控制器件,控制气源来驱动阀门机械单元,完成了一个集自动控制、手动调节、状态检测等功能于一体的智能控制系统。该系统适用于各类工业控制阀。 关键词:阀门定位器;故障维护;海水淡化;工作原理 The valve locator working principle and fault maintenance ※※※ Abstract:Briefly introduced the valve locator and working principle of the daily breakdown maintenance. With seawater desalination valve locator, for example, through the valve locator control device, control air to drive the valve mechanical units, completed a collection of automatic control, manual adjustment, state detection capabilities in one of the intelligent control system. The system is applicable to many kinds of industrial valve. Key words:The valve locator; Fault maintenance; Seawater desalination;Working principle 前言 气动调节阀在自动调节系统中是一个非常重要的环节。人们常把调节阀比喻为生产过程自动化的“手足”。由于生产过程的调节对象要求调节阀具有各种各样的特性,以满足生产工艺的需要。在调节阀的附属装置中,最主要、最实用的是阀门定位器。阀门定位器是气动调节阀的关键器件之一,其作用是把调节装置输出的电信号变成驱动调节阀动作的气信号。它具有阀门定位功能,既克服阀杆摩擦力,又可以克服因介质压力变化而引起的不平衡力,从而能够使阀门快速的跟随,并对应于调节器输出的控制信号,实现调节阀快速定位,提升其调节品质。随着智能仪表技术的发展,微电子技术广泛应用在传统仪表中,大大提高了仪表的功能与性能。海水淡化在蒸汽管道和海水管道应用了多种智能的阀门定位器,如SIEMENS SIPART PS2智能阀门定位器、ABB阀门定位器、上海高特阀门定位器,为了实现完全的自动化控制,多数阀门定位器都采用了带反馈调节控制。这些定位器的控制原理大同小异,常见故障也类似。节文中主要介绍了阀门的结构及工作原理、举例分析日常维护常出现的故障处理情况。 1.阀门定位器的工作原理 虽然智能阀门定位器与传统定位器从规律上基本相同,都是将输入信号(4~20mA)与位置反馈进行比较后对输出压力信号进行调节。但在执行元件上智能定位器和传统定位器完全不同,也就是工作方式上二者完全不不同,智能定位器以CPU(微处理器)为核心,利用了新型的压电阀代替定位器中的喷嘴、挡板调压系统来实现对输出压力的调节,海水淡化水路及蒸汽管网系统上,上海海高特阀门定位器与SIEMENS SIPART PS2阀门定位器是的传统阀门定位器和智能阀门定位器的典型。 壹
数控铣床、加工中心操作面板按键介绍
数控铣床、加工中心操作面板按键介绍 项目一操作面板及其功能应用加工中心的操作面板由机床控制面板和数控系统操作面板两部分组成,下面分别作一介绍。一、机床操作面板主要由操作模式开关、主轴转速倍率调整开关、进给速度倍率调整开关、快速移动倍率开关以及主轴负载荷表、各种指示灯、各种辅助功能选项开关和手轮等组成。不同机床的操作面板,各开关的位置结构各不相同,但功能及操作方法大同小异,具体可参见数控铣床操作项目相关内容。二、数控系统操作面板由CRT显示器和操作键盘组成,面板功能键介绍可参见数控车床操作项目相关内容。项目二开机及回原点一、开机1、首先合上机床总电源开关;2、开稳压器、气源等辅助设备电源开关;3、开加工中心控制柜总电源;4、将紧急停止按钮右旋弹出,开操作面板电源,直到机床准备不足报警消失,则开机完成。二、机床回原点开机后首先应回机床原点,将模式选择开关选到回原点上,再选择快速移动倍率开关到合适倍率上,选择各轴依次回原点。三、注意事项1、在开机之前要先检查机床状况有无异常,润滑油是否足够等,如一切正常,方可开机;2、回原点前要确保各轴在运动时不与工作台上的夹具或工件发生干涉;3、回原点时一定要注意各轴运动的先后顺序。项目三工件安装根据不同的工件要选用不同的夹具,选用夹具的原则:1、定位可靠;2、夹紧力要足够。安装夹具前,一定要先将工作台和夹具清理干净。夹具装在工作台上,要先将夹具通过量表找正找平后,再用螺钉或压板将夹具压紧在工作台上。安装工件时,也要通过量表找正找平工件。项目四刀具装入刀库一、刀具选用加工中心的刀具选用与数控铣床基本类似,在此不再赘述。二、刀具装入刀库的方法及操作当加工所需要的刀具比较多时,要将全部刀具在加工之前根据工艺设计放置到刀库中,并给每一把刀具设定刀具号码,然后由程序调用。具体步骤如下:1、将需用的刀具在刀柄上装夹好,并调整到准确尺寸;2、根据工艺和程序的设计将刀具和刀具号一一对应;3、主轴回Z轴零点;4、手动输入并执行“T01M06”;5、手动将1号刀具装入主轴,此时主轴上刀具即为1号刀具;6、手动输入并执行“T02M06”;7、手动将2号刀具装入主轴,此时主轴上刀具即为2号刀具;8、其它刀具按照以上步骤依次放入刀库。三、注意事项将刀具装入刀库中应注意以下问题:1、装入刀库的刀具必须与程序中的刀具号一一对应,否则会损伤机床和加工零件;2、只有主轴回到机床零点,才能将主轴上的刀具装入刀库,或者将刀库中的刀具调在主轴上;3、交换刀具时,主轴上的刀具不能与刀库中的刀具号重号。比如主轴上已是“1”号刀具,则不能再从刀库中调“1”号刀具。项目五对刀及刀具补偿一、对刀对刀方法与具体操作同数控铣床。二、刀具长度补偿设置加工中心上使用的刀具很多,每把刀具的长度和到Z坐标零点的距离都不相同,这些距离的差值就是刀具的长度补偿值,在加工时要分别进行设置,并记录在刀具明细表中,以供机床操作人员使用。一般有两种方法:1、机内设置这种方法不用事先测量每把刀具的长度,而是将所有刀具放入刀库中后,采用Z向设定器依次确定每把刀具在机床坐标系中的位置,具体设定方法又分两种。(1)第一种方法将其中的一把刀具作为标准刀具,找出其它刀具与标准刀具的差值,作为长度补偿值。具体操作步骤如下:①将所有刀具放入刀库,利用Z向设定器确定每把刀具到工件坐标系Z向零点的距离,如图5-2所示的A、B、C,并记录下来;②选择其中
运算放大器零点调整及
运算放大器零点调整及AC/DC 平均值转换电路 运算放大器的使用场合广泛,使用频率比较频繁。当应用在测量仪器仪表电路中的直流放大时,往往对其零信号输入时的输出零点有较高的要求。 这里出示的通用运放简易调零方法,可以方便达到输入信号为零时,输出零点偏差在 1 ~ 2mV 之内。如果需要更加小的零点输出,就需要把红色字体6K8 的固定电阻更换成为微调电阻,否则会不容易选择到合适的配置电阻数值。 必须保证运放的供电是稳定的。否则,零点就会发生漂移波动,甚至导致电路不能使用。 零点偏差2mV ,对满度200mV 的仪表来说,例如数字万用表,就是1%~2% 的零点误差;对满度 2.5V 的A/D 转换来说,就是1~2/2500 的零点误差;而对满度为5V 的A/D 转换来说,就是1~2/5000 的零点误差....,余类推。 需要认真考虑在整个电路里头的指标参数要求来决定允许运放的零点误差,以便更好地达到自己设计的目标。 下图是一个放大倍数10 倍的通用运放应用电路,输出零点在没有信号输入时,通常都会在±15 ~25mV 左右,可以按照上图所示进行零点调整。 调整的原理就是改变零信号输入时,运放同相端的静态电压,使它在零输入信号时具有一个可以让输出非常接近零点的正的或者负的“偏置”电压,由于高阻运放的输入阻抗一般都很高,因此,可以使用100K~数千K 的隔离电阻来保证不会因为零点调整电路造成输入阻抗的降低,如果使用的不是高阻运放,就需要注意这个隔离电阻不能太大,具体数值可以查阅其的数据手册。
调整需要在数字电压表的监视下进行,通过更换上端1M ~22M 的电阻或者运放输出端6K8 的电阻来满足要求。如果零信号时,输出偏向负的一端,表示运放输出端的电压需要高一些,因此,上端电阻就与+5V 端连接;如果零信号时,输出偏向正的一端,表示运放输出端的电压需要低一些,因此,上端电阻就与-5V 端连接。 如果需要更加小的零点和更加精确的零点数值,可以把运放输出端电阻更换成多圈微调电位器,通过调整电位器,可以使零信号输入时运放输出零点仅仅在数uV 的水平。 实践出真知,只有通过自己的实践,才可以证实上图的实际作用,这里仅仅是一种实践体会交流。 下面的原理图和印刷板图是按照DT930F+ 4_1/2 位万用表电路实际绘制。可以作为今后实际电路参考。 运算放大器反馈电阻仅仅是2*100K ,没有使用大的MΩ级电阻。两只4u7 和一只10u 电容器也是普通电解电容器,注意接入的极性。