平面机构的运动分析习题和答案

2 平面机构的运动分析
1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed →
代 表 , 杆4 角 速 度
ω4的 方 向 为
时 针 方 向。
2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。
3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个
瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。
4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。
5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。
6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb →
代
表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。
7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。
8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。
9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。
10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。
11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。
12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。
13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。
15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。
16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。
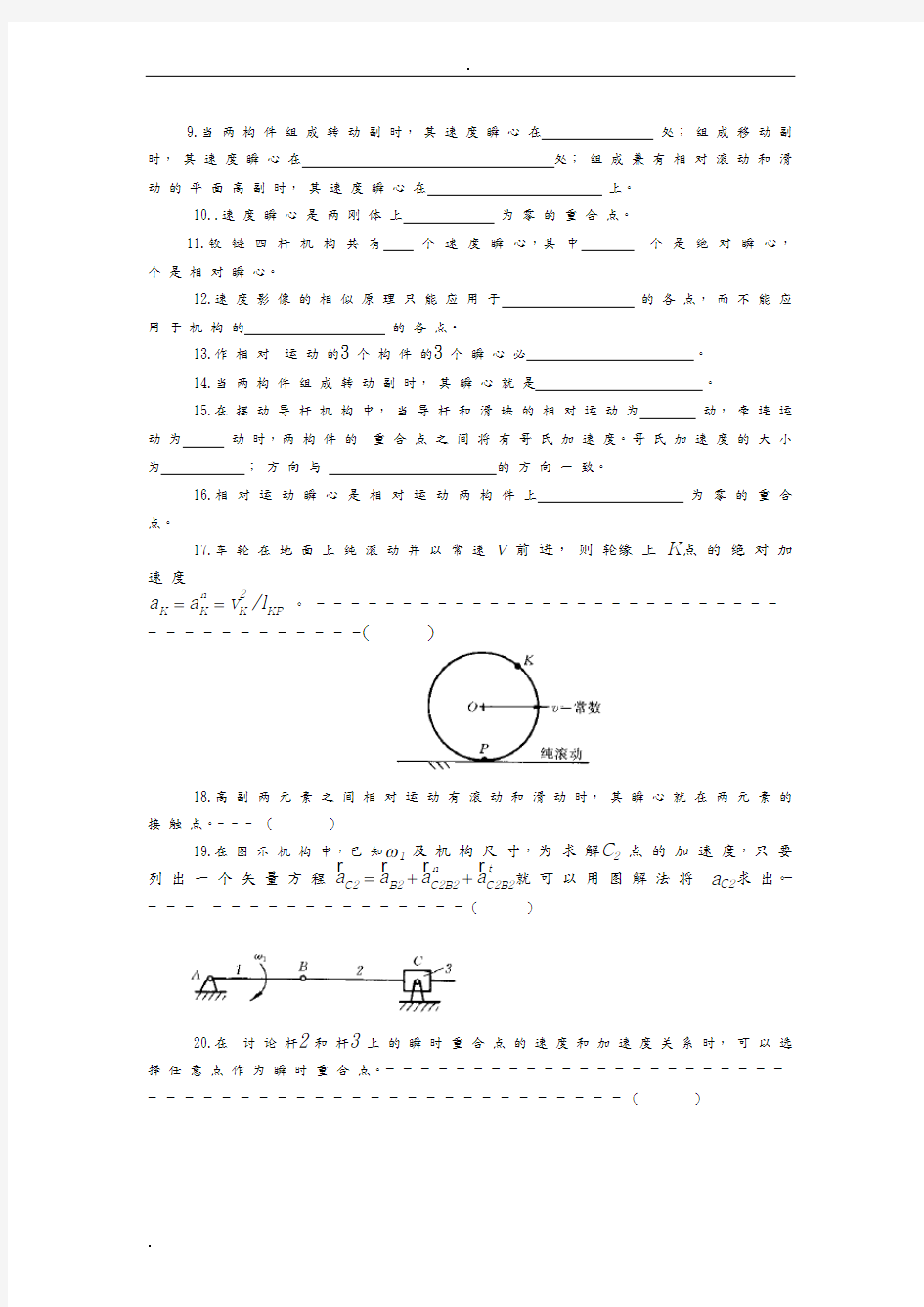
17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加
速 度
a a v l K K K KP ==n /2
。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( )
18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( )
19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要
列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t
就 可 以 用 图 解 法 将 a C 2求 出。-
- - - - - - - - - - - - - - - - - ( )
20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - -
- - - - - - - - - - - - - - - - - - - - - - - - - - ( )
21.给定图示机构的位置图和速度多边形,则图示的a B B23
k的方向是对的。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( )
23
23
k
22.图示机构中,因为v v
B B
12
=,a a
B B
12
=,所以
r r
a a v
B B B B B B
3231131
2
k k
==ω。- - - ( )
23.平面连杆机构的活动件数为n,则可构成的机构瞬心数是n n()
+1
2
。 - - - - ( )
24.在同一构件上,任意两点的绝对加速度间的关系式中不包含哥氏加速度。- - - - ( )
25.当牵连运动为转动,相对运动是移动时,一定会产生哥氏加速度。- - - - - - - - ( )
26.在平面机构中,不与机架直接相连的构件上任一点的绝对速度均不为零。- - - ( )
27.两构件组成一般情况的高副即非纯滚动高副时,其瞬心就在高副接触点处。- - ( )
28.给定导杆机构在图示位置的速度多边形。该瞬时
r
a
B B
23
k
和
r
v
B B
23
k
的正确组合应是图。
B B 23
B B 23B B 23
B B 23
B B 23
B B 23
B B 23
B B 23
k
k
k
k
29.给 定 图 示 六 杆 机 构 的 加 速 度 多 边 形, 可 得 出 (A) 矢 量c d ''
→ 代 表 a CD , α5是 顺 时 针 方 向;
(B) 矢 量c d ''→ 代 表a CD , α5是 逆 时 针 方 向; (C) 矢 量 c d ''
→代 表a DC , α5是 顺 时 针 方 向; (D) 矢 量c d ''
→ 代 表a DC , α5是 逆 时 针 方 向。
30.利 用 相 对 运 动 图 解 法 来 求 解 图 示 机 构 中 滑 块2 上D 2 点 的 速 度r
v D 2,
解 题 过 程 的 恰 当 步 骤 和 利 用 的 矢 量 方 程 可 选 择 。
(A )r r r
v v v B B B B 3
232=+ , 速 度 影 像?pbd 2~?CBD (B )r r r
v v v B B B B 3232=+, 速 度 影 像?pbd 3~?CBD
(C )r r r
v v v D B DB =+,v l DB BD =?ω1
(D )r r r r r
v v v v v C C C C B C B 2323222=+=+,速 度 影 像
?c b d 222~?CBD
31.作 连 续 往 复 移 动 的 构 件, 在 行 程 的 两 端 极 限 位 置 处, 其 运 动 状 态 必 定 是 。
(A )v a ==00,; (B )v =
0,a =max ;
(C )v =0,a ≠0 ; (D )v ≠0,a ≠0。
32.图 示 连 杆 机 构 中 滑 块2 上E 点 的 轨 迹 应 是 。
(A ) 直 线 ; (B ) 圆 弧 ; (C ) 椭 圆; (D ) 复 杂 平 面 曲 线。
33.构 件2 和 构 件3 组 成 移 动 副, 则 有 关 系
(A )v v B B C C 23
23= ,ωω23= ; (B )v v B B C C 2323≠ ,ωω23= ;
(C )v v B B C C 2323= , ωω23≠ ; (D )v v B B C C 2323≠ ,ωω23≠ 。
34.用 速 度 影 像 法 求 杆3 上 与D 2 点 重 合 的D 3 点 速 度 时, 可 以 使
(A ) ?ABD ~?pbd 22;
(B )?CBD ~?pbd 22;
(C )?CBD ~?pbd 33 ; (D )?CBD ~?pbd 23。
34.图 示 凸 轮 机 构 中P 12 是 凸 轮1 和 从 动 件2 的 相 对 速 度 瞬 心。 O 为 凸 轮 廓 线 在 接 触 点 处 的 曲 率 中 心, 则 计 算 式 是 正 确 的。
(A ) a v l B B B BP 2122
12
n /= ; (B ) a v l B B B BO 2122
n =/ ;
(C ) a v l B B B B BP 2121212
n =/ ; (D ) a v l B B B B BO 21212
n =/ 。
36.在 两 构 件 的 相 对 速 度 瞬 心 处, 瞬 时 重 合 点 间 的 速 度 应 有 。 (A ) 两 点 间 相 对 速 度 为 零, 但 两 点 绝 对 速 度 不 等 于 零;
(B ) 两 点 间 相 对 速 度 不 等 于 零, 但 其 中 一 点 的 绝 对 速 度 等 于 零; (C )两 点 间 相 对 速 度 不 等 于 零 且 两 点 的 绝 对 速 度 也 不等 于 零; (D )两点 间 的 相 对 速 度 和 绝 对 速 度 都 等 于 零。 37.在 图 示 连 杆 机 构 中, 连 杆2 的 运 动 是 。
(A ) 平 动; (B ) 瞬 时 平 动; (C ) 瞬 时 绕 轴B 转 动; (D ) 一 般 平 面 复 合 运 动。
38.将 机 构 位 置 图 按 实 际 杆 长 放 大 一 倍 绘 制, 选 用 的 长 度 比 例 尺μl 应
是 。
(A )0.5 mm/mm ; (B )2 mm/mm ; (C )0.2 mm/mm ; (D )5 mm/mm 。 39.两 构 件 作 相 对 运 动 时, 其 瞬 心 是 指 。 (A ) 绝 对 速 度 等 于 零 的 重 合 点;
(B ) 绝 对 速 度 和 相 对 速 度 都 等 于 零 的 重 合 点;
(C ) 绝 对 速 度 不 一 定 等 于 零 但 绝 对 速 度 相 等 或 相 对 速 度 等 于 零 的 重 合 点。
40.下图是四 种 机 构 在 某 一 瞬 时 的 位 置 图。 在 图 示 位 置 哥 氏 加 速 度 不 为 零 的 机 构 为 。
41.利 用 相 对 运 动 图 解 法 求 图 示 机 构 中 滑 块2 上D 2 点 的 速 度v D 23
的 解
题 过 程 的 恰 当 步 骤 和 利 用 的 矢 量 方 程 为:
(A )r r r
v v v B B B B 3232=+ , 利 用速 度 影 像 法?pbd 2~?CBD ;
(B )r r r v v v B B B B 3232=+, ?pbd 32~?CBD ;
(C )r r r
v v v D B DB =+, 式 中v l DB DB =ω1
(D )r r r v v v B B B B 3232=+, 求 出v B 3 后, 再 利 用r r r
v v v D B D B 2222=+。
42.
43.在 图 示 曲 柄 滑 块 机 构 中, 已 知 连 杆 长l
r e =+(r 为 曲 柄 长,e 为 导 路
偏 距), 滑 块 行 程 是 否 等 于
()r l e +-22? 为 什 么?
44.在 机 构 图 示 位 置 时 (AB BC ⊥)有 无 哥 氏 加 速 度a C C 23k
? 为 什 么?
45.已 知 铰 链 四 杆 机 构 的 位 置( 图a ) 及 其 加 速 度 矢 量 多 边 形 ( 图 b ), 试 根 据 图 b 写 出 构 件 2 与 构 件 3 的 角加 速 度 α2、α3的 表 达 式, 并 在 图 a 上 标 出 它 们 的 方 向。
46.图 示 机 构 中 已 知ω110= rad/s ,α10=, 试 分 析 ω3及 α3为 多 大。
47.图 示 机 构 有 无 哥 氏 加 速 度a B B 23k
? 为 什 么?
48.图 示 为 曲 柄 导 杆 机 构, 滑 块2 在 导 杆3(CD ) 中 作 相 对 滑 动,AB 为 曲
柄。 当 在 图 示 位 置 时, 即 曲 柄AB ( 构 件1) 和 导 杆CD ( 构 件3) 重 合 时, 有 无
哥 氏 加 速 度a B B 23k
? 为 什 么?
49.什 么 叫 机 构 运 动 线 图?
50.已 知 六 杆 机 构 各 构 件 的 尺 寸、 位 置 及 原 动 件 的 角 速 度 ω1=常 数, 欲
求ω5、α5。 如 采 用 相 对 运 动 图 解 法 时, 此 题 的 解 题 顺 序 应 如 何?
51.图 示 为 按 比 例 尺 绘 制 的 牛 头 刨 床 机 构 运 动 简 图 和 速 度 矢 量多 边 形。 试 由 图 中 的 比 例 尺 计 算 导 杆3 的 角 速 度 ω3和 滑 块2 的 角 速 度ω2, 并 指 出
其 方 向。( 提 示:S 3 为 构 件3 上 特 殊 点, 据 S B CD 3⊥、S D v D 3⊥求 得, 作 题 时 不 必 去 研 究 v S 3 如 何 求 得。)
( 取 μl
=0005. m/mm ,μv =0003
. (m/s)/mm 。)
52.试 求 图 示 机 构 的 速 度 瞬 心 数 目、 各 瞬 心 位 置、 各 构 件 角 速 度 的 大 小 和 方 向、 杆2 上 点M 的 速 度 大 小 和 方 向。( 机 构 尺 寸 如 图:r 110= mm ,r 2
20= mm ,
l AB =30 mm ,l BC =67 mm ,∠=?BAx 45,l BM =35 mm ,μl =0001
. m/mm 。) 已 知 ω130= rad/s 。
53.图 示 机 构 中 尺 寸 已 知(μl =005. m/mm ), 机 构1 沿 构 件4 作 纯 滚 动, 其 上
S 点 的 速 度 为 v S (μv =06. (m/s)/mm )。
(1) 在 图 上 作 出 所 有 瞬 心; (2) 用 瞬 心 法 求 出 K 点的 速 度v K 。
54.画 出 图 示 机 构 的 指 定 瞬 心。
(1) 全 部 瞬 心 。 (2) 瞬 心 P 24、P 26。
55.在 图 示 机 构 中, 已 知 滚 轮2 与 地 面 作 纯 滚 动, 构 件3 以 已 知速 度v 3 向
左 移 动, 试 用 瞬 心 法 求 滑 块5 的 速 度v 5 的 大 小 和 方 向,
以 及 轮2 的 角 速 度ω2 的 大 小 和 方 向。
56.已 知 图 示 机 构 的 尺 寸 和 位 置。 当ω10= 时, 试 用 瞬 心 法 求i 35。
57.在 图 示 机 构 中, 已 知 构 件1 以ω1 沿 顺 时 针 方 向 转 动, 试 用 瞬 心 法
求 构 件2 的 角 速 度ω2 和 构 件4 的 速 度v 4 的 大 小( 只 需 写 出 表 达 式) 及 方 向。
58.图 示 齿 轮- 连 杆 机 构 中, 已 知 齿 轮2 和5 的 齿 数 相 等, 即z z 2
5=, 齿 轮2 以ω2100= rad/s 顺 时 针 方 向 转 动, 试 用 瞬 心 法 求 构 件3 的 角 速 度ω3 的 大 小 和 方 向。( 取μl =0001. m/mm 。)
59.在 图 示 机 构 中, 已 知 原 动 件 1 以 匀 角 速 度ω1 沿 逆 时 针 方 向 转 动, 试 确 定:(1) 机 构 的 全 部 瞬 心;(2) 构 件 3 的 速 度v 3( 需 写 出 表 达 式)。
60.求 图 示 五 杆 机 构 的 全 部 瞬 心,已 知 各 杆 长 度 均 相 等,ωω14=且ω1 与
ω4回 转 方 向 相 反。
61.求 图 示 机 构 的 速 度 瞬 心 的 数 目, 并 在 图 中 标 出 其 中 的 12 个 瞬 心。
62.图 示 摆 动 导 杆 机 构 中, 已 知 构 件 1 以 等 角 速 度ω110= rad/s 顺 时 针 方 向 转 动, 各 构 件 尺 寸l AB
=15 mm ,l BC =25 mm ,φ160=?。 试 求:
(1) 构 件 1、3 的 相 对 瞬 心; (2) 构 件 3 的 角 速 度ω3;
(3) 构 件 2 的 角 速 度ω2。
63.画 出 图 示 机 构 的 全 部 瞬 心。
64.在 图 示 机 构 中, 已 知 凸 轮1 的 角 速 度ω1 的 大 小 和 方 向, 试 用 瞬 心 法
求 构 件3 的 速 度 大 小 及 方 向。
65.图 示 机 构 的 长 度 比 例 尺μl
=0001
. m/mm , 构 件1 以 等 角 速 度 ω110= rad/s 顺 时 针 方 向转 动。 试 求:
(1) 在 图 上 标 注 出 全 部 瞬 心;
(2) 在 此 位 置 时 构 件3 的 角 速 度ω3 的 大 小 及 方 向。
66.已 知 图 示 机 构 的 尺 寸 及 原 动 件1 的 角 速 度ω1。
(1) 标 出 所 有 瞬 心 位 置;
(2) 用 瞬 心 法 确 定 M 点 的 速 度νM 。
67.已 知 图 示 机 构 的 尺 寸 及 原 动 件1 的 角 速 度ω1。
(1) 标 出 所 有 瞬 心 位 置;
(2) 用 瞬 心 法 确 定M 点 的 速 度v M 。
68. 标出下列机构中的所有瞬心。
= rad/s。试用瞬心法确
69.图示机构中,已知?= 45?,H=50 mm,ω1100
定图示位置构件3的瞬时速度v3的大小及方向。
70.试 在 图 上 标 出 机 构 各 构 件 间 的 瞬 心 位 置, 并 用 瞬 心 法 说 明 当 构 件1 等 速 转 动 时, 构 件3 与 机 架 间 夹 角? 为 多 大 时, 构 件3 的ω3 与ω1 相 等。
71.在图示的 四 杆 机 构 中,l AB
=65 mm ,l DC =90 mm ,l l AD BC ==125 mm ,?115=?。 当 构 件1 以 等 角 速 度ω110= rad/s 逆 时 针 方 向 转 动 时, 用 瞬 心 法 求C 点 的 速
度。
72.图 示 机 构 运 动 简 图 取 比 例 尺 μl
=0001
. m/mm 。 已 知 ω110= rad/s , 试 用 速 度 瞬 心 法 求 杆3 的 角 速 度 ω3。
73.在 图 示 机 构 中 已 知 凸 轮 以ω2 的 角 速 度 顺 时 针 方 向 转 动, 试 用 瞬 心 法 求 出 从 动 件3 的 速 度( 用 图 及 表 达 式 表 示)。
74.已 知 图 示 机 构 以 μl
=0001
. m/mm 的 比 例 绘 制,ω110= rad/s ,P 24 为瞬 心, 计 算 v E 的 值( 必 须 写 出 计 算 公 式 和 量 出 的 数 值)。
75.画 出 图 示 机 构 的 全 部 瞬 心。
76.画 出 图 示 机 构 的 全 部 瞬 心。
77.在 图 示 机 构 中, 曲 柄 AB 以 ω1 逆 时 针 方 向 回 转, 通 过 齿 条2 与 齿 轮3 啮 合, 使 轮3 绕 轴 D 转 动。 试 用 瞬 心 法 确 定 机 构 在 图 示 位 置 时 轮3 的 角 速 度ω3 的 大 小 和 方 向。( 在 图 中 标 出 瞬 心, 并 用 表 达 式 表 示ω3。)
78.试 求 图 示 机 构 的 全 部 瞬 心。
79.试 求 图 示 机 构 的 全 部 瞬 心, 并 说 明 哪 些 是 绝 对 瞬 心。
80.在 图 示 四 杆 机 构 中, 已 知 l l AB
BC ==20 mm ,l CD =40 mm ,∠α
=∠β = 90?, ω1100
= rad/s 。 试 用 速 度 瞬 心 法 求 C 点 速 度 v C 大 小 和 方 向。
81.试 求 图 示 机 构 的 全 部 瞬 心, 并 应 用 瞬 心 法 求 构 件3 的 移 动 速 度v 3 的 大 小 和 方 向。 图 中 已 知 数 据 h =50 mm ,φ160=?,ω110= rad/s 。
82.在 图 示 铰 链 五 杆 机 构 中, 已 知 构 件2 与 构 件5 的 角 速 度 ω2 与 ω5 的 大 小 相 等、 转 向 相 反。 请 在 图 上 标 出 瞬 心P 25 、P 24 及P 41 的 位 置。
83. 试 求 图 示 机 构 的 全 部 瞬 心。
84.
85.图 示 机 构 中, 齿 轮1、2 的 参 数 完 全 相 同,AB = CD = 30 mm , 处 于 铅 直 位 置,ω1100= rad/s , 顺 时 针 方 向 转 动, 试 用 相 对 运 动 图 解 法 求 构 件3 的 角 速 度ω3和 角 加 速 度α3 。( 机 构 运 动 简 图 已 按 比 例 画 出。)
86.图 示 机 构 的 运 动 简 图 取 长 度 比 例 尺μl
=0004. m/mm , 其 中 l AB =006. m ,l BD =026. m ,l AC =016. m ,
构 件1 以 ω120= rad/s 等 角 速 度 顺 时 针 方 向 转 动, 试 用 相 对 运 动 图 解 法 求 图 示 位 置:
(1)ω2、ω3、ω4和 ω5 的 大 小 和 方 向;
(2)α2、α3、α4 和 α5 的 大 小 和 方 向;
(3) 在 机 构 运 动简 图 上 标 注 出 构 件2 上 速 度 为 零 的 点 I 2, 在 加 速 度 多 边 形 图 上 标 注 出 构 件2 上 点I 2 的 加 速 度 矢 量π i 2'
, 并 算 出 点 I 2 的 加 速 度
a I2 的 大 小。 在 画 速 度 图 及 加 速 度 图 时 的 比 例 尺 分 别 为:μv = 0.02 (m/s)/mm ,μa =05. (m/s 2)/mm 。
( 要 列 出 相 应 的 矢 量 方 程 式 和 计 算 关 系 式。)
87.试 按 给 定 的 机 构 运 动 简 图 绘 制 速 度 多 边 形、 加 速 度 多 边 形。 已 知:
ω110= rad/s ,l AB =100
mm ,l l l BM CM MD ===200 mm , μl =001. m/mm 。 试 求: (1)ω2、ω4、α2、α4 大 小 和 方 向; (2)v 5、a 5 大 小 和 方 向。
88.在 图 示 机 构 中, 已 知: 各 杆 长 度,ω1 为 常 数。 试 求v 5 及a 5 。
89.在 图 示 机 构 中, 已 知 机 构 位 置 图 和 各 杆 尺 寸,ω1 = 常 数, l l BD
BE =,
l l l EF BC BE ==
1
3
, 试 用 相 对 运 动 图 解 法 求 v F 、a F 、v C 、a C 及 ω2、α2。
90.图示机构中,已知各构件尺寸:l AB
=15
mm ,l BD =60mm ,l ED =40mm ,l CE =38mm ,e =5 mm ,x =20 mm ,y =50 mm , 长 度 比 例 尺 μl =0001. m/mm , 原 动 件 1 以 等 角 速 度
ω1100
= rad/s 逆 时 针 方 向 转 动。 试 求: (1) 构 件 2、3、4 和5 的 角 速 度 ω2、ω3、ω4、ω5 的 大 小 及 方 向;
(2) 在 图 上 标 出 构 件 4 上 的 点 F 4, 该 点 的 速 度v F 4 的 大 小、 方 向 与 构 件 3 上 的 点 D 速 度v D 4 相 同;
(3) 构 件 2、3、4 和 5 的 角 加 速 度 α2、α3、α4、α5 的 大 小 和 方 向。( 建 议
速 度 比 例 尺 μv
=004. (m/s)/mm ,
加 速 度 比 例 尺 μa =2 (m/s 2
)/mm 。)( 要 求 列 出 相 应 矢 量 方 程 式 和 计 算 关 系 式。)
91.图 示 连 杆 机 构, 长 度 比 例 尺 μl
=0001
. m/mm , 其 中 l AB =15 mm , l CD =40 mm , l BC =40 mm ,l l BE EC ==20 mm ,l EF =20 mm ,ω120= rad/s 。 试 用 相
对 运 动 图 解 法 求:
(1)ω2、ω3、ω4、ω5 的 大 小 及 方 向;
(2)α2、α3、α4、α5 的 大 小 和 方 向;
(3)构 件 5 上 的 点 F 5 的 速 度 v F 5 和 加 速 度 a F 5;
(4) 构 件 4 上 的 点 F 4 的 速 度v F 4 和 加 速 度 a F 4。(速 度 多 边 形 和 加 速 度 多 边 形 的 比 例 尺 分 别 为 μv
=0005
. (m/s)/mm ,μa =006. (m/s 2)/mm , 要 求 列 出 相 应 的 矢 量 方 程 式 和 计 算 关 系 式。)
92.机构如图所示,已知构件长度,并且已知杆1以匀角速度ω1回转,用相对运动图解法求该位置滑块5 的速度及加速度。
93.已知机构位置如图所示,各杆长度已知,且构件1以ω1匀速转动,试用相对运动图解法求:(1)v C、v5;(2)a C、a5。
94.已知各杆长度及位置如图所示,主动件1以等角速度ω1运动,求:(1)v3、a3;(2)v5、a5(用相对运动图解法,并列出必要的求解式。)
机械原理教案 平面机构的力分析
第四章 平面机构的力分析 §4-1机构力分析的目的和方法 1、作用在机械上的力 驱动力:∠VS 锐角(驱动力→原动力) 作功 生产阻力(有效阻力) (+、-) 阻力 : ∠VS 钝角 有害阻力 常见的作用力:原动力、摩擦力、运动副反力、重力、“惯性力” 2、机构力分析的目的和方法 影响及其运动的动力性能→运转性能、调速、平衡、振动、功率分析 力(力矩) 后续机械设计重要参数→尺寸、机构、强度 确定运动副反力→ 强度、摩擦磨损、效率 任务(目的) 确定机构的平衡力(或平衡力矩)→原动机功率?克服生产阻力? §4-2构件惯性力的确定 假设已知构件质量、转动惯量(实际设计中可采用类比法,初估计,再逐步修正)及运动参数。 1、 做平面复合运动构件 两者可合二为一:力偶等效原理 2、做平面移动构件 0=ε 3、绕定轴转动构件 §4-3质量代换法 1、静代换问题求解 解决方法 图解法 (均不考虑构件的弹性变形,属于一般刚体运动学、动力学问题) 解析法 惯性力 s I a m P -= 惯性力矩 εs J M -= 绕质心轴转动 0=s a 绕非质心轴转动 只需考虑惯性力 刚体 几个集中质量 使问题简化 (有质量、转动惯量) (一般是2个) 用于平衡调速 代换代换前后总质量不变 代换前后质心不变 代换前后转动惯量不变 静代换 动代换
任取B 、C 为代换点: 解得:代换质量 2、 动代换问题的求解 解得 结论: 1) 静代换简单容易,其代换点B 、C 可随意选取。 2) 动代换只能随意选定一点,另外一点由代换条件确定。 3) 使用静代换,其惯性力偶矩将产生误差: ()[] [][]ε εε εmb c k mbc I c b bc c b cb m I c m b m I M C C C B C I --=--=????? ????? ??+++--=?+?--=?2222 4) m m m C B =+ c m b m c B ?=? c b c m m B += c b b m m c += m m m k B =+ k m b m k B ?=? c k B I k m b m =+22 (原构件转动惯量) k b k m m B += k b b m m k += B C m I k =
平面机构的运动分析习题和答案
2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。
9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( )
平面机构的运动分析答案
1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有 6 个速度瞬心,其中 3 个是绝对瞬心。 8.速度比例尺μ ν 表示图上每单位长度所代表的速度大小,单位为: (m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为 (m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij P直接标注在图上)。 P 24)
12 三、 在图a 所示的四杆机构中, l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3)当v C =0时,φ角之值(有两个解); 解:1)以选定的比例尺μl 作机构运动简图(图b )。 2)求v C ,定出瞬心P 13的位置(图b ) a ) (P 13) P P 23→∞
平面连杆机构的运动分析
平面连杆机构的运动分析 以典型平面连杆机构(牛头刨床机构)为研究对象,首先进行机构的运动分析,并列出相应方程,然后采用计算机C语言编程的方法,计算出机构中选定点的位移、速度,并绘出相关数据图像。 标签: 连杆机构;位移;速度;计算机编程 TB 1 前言 平面连杆机构是现代机械中应用的最为广泛的一种典型机构。平面连杆机构的典型应用包括牛头刨床机构、缝纫机、颚式破碎机等。在研究平面连杆机构的过程中对机构上某个特定点的研究是必不可少的。然而在传统的研究方法中,手工计算不仅计算量大,而且极易出错。随着计算机技术的广泛普及,计算机逐渐成为分析研究典型机械结构的有力工具。因此本文力求通过C语言编程技术来对牛头刨床机构来进行简单运动分析。 2 牛头刨床机构运动分析 图1所示的为一牛头刨床。假设已知各构件的尺寸如表1所示,原动件1以匀角速度ω1=1rad/s沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C点的位移、速度的变化情况。 角速度变化较为平缓,保证刨头慢速、稳定工作;在220°~340°之间为回程阶段,角速度变化较快,以提高效率;4杆有4个角速度为0点,即4杆的速度方向改变了四次。 C点的位移、速度分析:在0°~200°范围内,C点位移曲线斜率的绝对值变化较小,说明此时C点速度及加速度的变化量不大,且保持在较小值。200°~260°范围内C点的速度变化量明显增大,由速度图像可以推知加速度在220°左右达到最大值后快速减小,并使其速度在260°左右达到最大,而后加速度反向缓慢增大,速度持续减小到零以后又开始反向增大。 ①工作行程为θ1:0°~220°,回程为θ1:220°~340 °;工作行程角度大于回程角度,工作效率较高; ②工作行程阶段,刨头C点位移的变化较为平稳,速度可以近似看为匀速,
第3章 平面机构的运动分析答案
一、填空题: 1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有6个速度瞬心,其中3个是绝对瞬心。 8.速度比例尺μν表示图上每单位长度所代表的速度大小,单位为:(m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为(m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 P直接标注在图上)。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij
12 三、 在图a 所示的四杆机构中,l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度 a ) 24) 14(P 13) P 24 P 23→∞
平面机构力分析习题解答
第四章平面机构的力分析解答 典型例题解析 例4-1 图4-1所示以锁紧机构,已知各部分尺寸和接触面的摩擦系数f ,转动副的摩擦圆图上虚线圆,在P 力作用下工作面上产生夹紧力Q,试画此时各运动副中的总反力作用线位置和方向(不考虑各构件的质量和转动惯量) 。 图4-1 解 [解答] (1) BC 杆是二力杆,由外载荷P 和Q 判断受压,总反力23R F 和43R F 的位置和方向见图。 (2) 楔块4所受高副移动副转动副的三个总反力相平衡,其位置方向及矢量见图。 (3) 杆2也是三力杆,所受的外力P 与A,B 转动副反力相平衡,三个力的位置见图。 例4-2 图示摇块机构,已知,90 ABC 曲柄长度,86,200,1002mm l mm l mm l BS AC AB 连 杆的质量,22kg m 连杆对其质心轴的转动惯量22.0074.0m kg J S ,曲柄等角速转动s rad /401 , 求连杆的总惯性力及其作用线。
[解答] (1) 速度分析 ,/41s m l v AB B 其方向垂直于AB 且为顺时针方向 32322C C C B C B C 大小: s m /4 0 0 ? 方向: AB BC 取mm s m v /2 .0 作速度图如(b ),得 02232 B C B C l v (2)加速度分析 ,/160221s m l a AB B 其方向由B 指向A 。 32323t C2B n C2B 2 C C r C C k C B C 大小: 160 0 ? 0 0 ? 方向:A B B C 2BC BC BC 取mm s m a 2 /8 作加速度图如图(C) 22 2/80s m s p a a s 222 2/100s m C C a a B C t 222222/76.923160s rad l l l a AB AC B C t B C ,逆时针方向。 (3)计算惯性力,惯性力矩 N a m F S I 160222 ,方向如图( )所示。 m N J M S I .836.6222 ,方向为顺时针方向。 例4-3 在图示的摆动凸轮机构中,已知作用于摆杆3上的外载荷Q,各转动副的轴颈半径r 和当量摩擦系数v f ,C 点的滑动摩擦因素f 以及机构的各部分尺寸。主动件凸轮2的转向如图,试求图示位置时作用于凸轮2上的驱动力矩M 。
3平面机构力分析(包括摩擦和自锁)
A0700003机械原理试卷 一、选择题 1. 在由若干机器并联构成的机组中,若这些机器中单机效率相等均为,则机组的总效率必有如下关系:。 A、B、 C、D、 (为单机台数)。 答案:C 2. 三角螺纹的摩擦矩形螺纹的摩擦,因此,前者多用于。 A、小于; B、等于; ( C、大于; D、传动; E、紧固联接。 答案: CE 3. 在由若干机器串联构成的机组中,若这些机器的单机效率均不相同,其中最高效率和最低效率分别为和,则机组的总效率必有如下关系:。 A、B、
C、D、。 答案: A 4. 构件1、2 间的平面摩擦的总反力的方向与构件2对构件1 的相对运动方向所成角度恒为。 A、 0; - B、 90; C、钝角; D、锐角。 答案: C 5. 反行程自锁的机构,其正行程效率,反行程效 率。 A、B、 C、D、 答案: CD 6. 图示平面接触移动副,为法向作用力,滑块在力作用下沿方向运动,则固定件给滑块的总反力应是图中所示的作用线和方向。
| 答案: A 7. 自锁机构一般是指的机构。 A、正行程自锁; B、反行程自锁; C、正反行程都自锁。 答案: B 8. 图示槽面接触的移动副,若滑动摩擦系数为,则其当量摩擦系数 。 A、 B、 C、 D、 答案: B 9. 在其他条件相同的情况下,矩形螺纹的螺旋与三角螺纹的螺旋相比,前者? A、效率较高,自锁性也较好;
? B、效率较低,但自锁性较好; C、效率较高,但自锁性较差; D、效率较低,自锁性也较差。 答案: C 10. 图示直径为的轴颈1与轴承2组成转动副,摩擦圆半径为,载荷为,驱动力矩为,欲使轴颈加速转动,则应使。 A、=, B、, C、=, D、。 * 答案: D 11. 轴颈1与轴承2 组成转动副,细实线的圆为摩擦圆,轴颈1 受到外力( 驱动力 ) 的作用,则轴颈1 应作运动。 A、等速; B、加速; C、减速。
第二章平面机构的运动分析
1、试求出下列机构中的所有速度瞬心。 (a) (b) (c) (d) 2、图示的凸轮机构中,凸轮的角速度ω1=10s-1,R=50mm,l A0=20mm,试求当φ=0°、45°及90°时,构件2的速度v。 题2图凸轮机构题3图组合机构 3、图示机构,由曲柄1、连杆2、摇杆3及机架6组成铰链四杆机构,轮1′与曲柄1
固接,其轴心为B,轮4分别与轮1′和轮5相切,轮5活套于轴D上。各相切轮之间作纯滚动。试用速度瞬心法确定曲柄1与轮5的角速比ω1/ω5。 4、在图示的颚式破碎机中,已知:x D=260mm,y D=480mm,x G=400mm,y G=200mm,l AB=l CE=100mm,l BC=l BE=500mm,l CD=300mm,l EF=400mm,l GF=685mm,?1=45°,ω1=30rad/s逆时针。求ω 5、ε5。 题4图破碎机题5图曲柄摇块机构 5、图示的曲柄摇块机构, l AB=30mm,l AC=100mm,l BD=50mm,l DE=40mm,?1=45°,等角速度ω1=10rad/s,求点E、D的速度和加速度,构件3的角速度和角加速度。 6、图示正弦机构,曲柄1长度l1=,角速度ω1=20rad/s(常数),试分别用图解法和解析法确定该机构在?1=45°时导杆3的速度v3与加速度a3。 题6图正弦机构题7图六杆机构 7、在图示机构中,已知l AE=70mm,l AB=40mm,l EF=70mm,l DE=35mm,l CD=75mm,l BC=50mm,?1=60°,构件1以等角速度ω1=10rad/s逆时针方向转动,试求点C的速度和加速度。
平面连杆机构大作业
大作业(一) 平面连杆机构的运动分析 (题号:5-C) 班级:机制114 学号:2011012789 姓名:陈莎 同组其他人员:许龙飞张海洋 完成日期:2012.10.31
一.题目及原始数据; 二、牛头刨床机构的运动分析方程三.计算程序框图; 四.计算源程序; 五.计算结果; 六.运动线图及运动分析 七.参考书;
一、题目及原始数据; 图b 所示的为一牛头刨床(Ⅲ级机构)。假设已知各构件的尺寸如表2所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C 点的位移、速度和加速度的变化情况。 G b ) 表2 牛头刨床机构的尺寸参数(单位:mm ) 题 号 l AB l CD l DE h h 1 h 2 A B C 5-c 200 180 900 460 120 l CD =950 l CD =1020 l CD =980 要求:每三人一组,每人一个题目,每组中至少打印出一份源程序,每人计算出原动件从0゜~360゜时(N=36) 各运动变量的大小,并绘出各组对应的运动线图以 及E 点的轨迹曲线。 二、牛头刨床机构的运动分析方程 1)位置分析 建立封闭矢量多边形 由图可知 =3θ,故未知量有3θ、4θ、3S 、5S 。利用两个封闭图形ABDEA 和EDCGE , 建立两个封闭矢量方程,由此可得: A B C D E 2 1 3 4 5 6 h h 1 h 2 x y F F'
把(式Ⅰ)写成投影方程得:??? ? ??????????=+=-++=++=+h l l s l l l h s l l h s l 33445334411133441123344sin sin 0cos cos sin sin sin cos cos cos θθθθθθθθθθ(式Ⅱ) 由以上各式用型转化法可求得5343 s s θθ, 23θθ= 解: 211111 *cos *sin b b x h l y h l θθ=+?? =+? 44 44 *cos *sin d d x l y l θθ=?? =? 223()()d b d b s x x y y =-++ 3 sin b d x x s α-= 333 33)*sin *()/*cos *(/c d d b d c d d b d s x x l x l x x s y y l y l y y s αα=+=+-??? =+=+-?? 3tan c d c d y y x x θ-= - 5c s x = ()2212ae AE h h =+ 444 () tan *cos d c y h y l θθ+-= 高斯消去法求解 2.速度分析 对(式Ⅱ)求一次导数得: 44433333111444333331114443335444333*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *'0*cos **cos *0l s l l s s l l l s l l θωθθωθωθωθθωθωθωθωθωθω-+-=-??++=? ? ---=? ?+=? (式Ⅲ) 矩阵式:
平面连杆机构运动及动力分析
毕业设计报告(论文) 报告(论文)题目:平面连杆机构运动及动力分析作者所在系部:机械工程系 作者所在专业:机械设计制造及其自动化 作者所在班级: B07115 作者姓名: 作者学号: 指导教师姓名: 完成时间: 2011年6月 北华航天工业学院教务处
摘要 平面连杆机构是一种应用十分广泛的机构。平面连杆机构全部采用低副连接,因而结构简单易于制造,结实耐用,不易磨损,适于高速重载;运动低副具有良好的匣形结构,无需保养,适于极度污染或腐蚀而易出现问题的机器中;平面连杆机构能够实现多种多样复杂的运动规律,而且结构的复杂性不一定随所需完成的运动规律性的复杂程度而增加;平面连杆机构还具有一个独特的优点,就是可调性,即通过改变机构中各杆件长度,从而方便地改变了原机构的运动规律和性能。连杆机构由于结构上的特点在各种机械行业中被广泛的采用。通过对连杆机构的设计,可以实现不同的运动规律,满足预定的位置要求和满足预定的轨迹要求。 机构运动及动力分析的目的是分析各个构件的位移、、角加速度以及受力,分析构件上某点的位置、轨迹、速度和加速度等。这种方法能给出各运动参数与机构尺寸间的解析关系及写出机构某些点的轨迹方程式,能帮助我们合理地选择机构的尺寸,从而对某一机构作深入的系统研究。 平面连杆机构运动及动力分析,就是以连杆机构作为研究对象,对其各个运动件之间的关系公式进行推导,应用现代设计理论方法和有关专业知识进行系统深入地分析和研究,探索掌握其运动规律,讨论重要参数间的关系。 关键词:平面连杆机构运动性能仿真运动规律 Abstract Planar linkage mechanisms are used widely. Planar linkage mechanisms take the use of lower pair connection, so its structure is easy to manufacture, durable and resistant, especially suitable for high-speed and heavy-duty; lower pair sports has a good box-shaped structure, without maintenance, which is fit for machines working in extreme contamination or often coming with problems because of corrosion; planar linkage mechanism not only can achieve a variety of complex movement, but also the more complex movem ent doesn’t go with more complex structure; what gives linkage a unique advantage is that the motive rules and performance of the original mechanism will change with the length of the bar. As a result, linkage mechanisms are widely used in mechanical industries. By changing the design of linkage mechanisms, it can achieve different motive rules in order to move as the intended location and trajectory.
平面六杆机构的运动分析Matlab代码
平面六杆机构的运动分析M代码 %参数赋值 clc,clear l0=22; l1=40; l2=55; l3=55; l4=44; l5=35; M=-1; Omiga1=10; Theta1=0:0.01:360; Theta1=Theta1*pi/180; %求解各个构件位移、速度、加速度 A=2*l1*l2*sin(Theta1); B=2*l2*(l1*cos(Theta1)-l0); C=l1^2+l2^2+l0^2-l3^2-2*l1*l0*cos(Theta1); E=2*l1*l3*sin(Theta1); F=2*l3*(l1*cos(Theta1)-l0); G=l2^2-l1^2-l3^2-l0^2+2*l1*l0*cos(Theta1); Theta3=2*atan((E+M*sqrt(E.^2+ F.^2- G.^2))./(F-G)); Theta31= Theta3-30; S=l5.*cos(Theta31)-sqrt(-l5^2.* sin(Theta31).^2+l4^2); Theta2=2*atan((A+M*sqrt(A.^2+B.^2-C.^2))./(B-C)); Theta4=atan(l5.*sin(Theta31)./(l5.*cos(Theta31)-S)); Omiga2=Omiga1*l1*sin(Theta1-Theta3)./(l2*sin(Theta3-Theta2)); Omiga3=Omiga1*l1*sin(Theta1-Theta2)./(l3*sin(Theta3-Theta2)); Omiga4=((-l5).*Omiga3.*cos(Theta31))./(l4.*cos(Theta4)); Vf=-l5.*Omiga3.*sin(Theta31)+l4.*Omiga4.*sin(Theta4); Alfa3=(Omiga1^2*l1*cos(Theta1-Theta2)+Omiga2.^2*l2-Omiga3.^2*l3.*cos(Theta3-Theta2))./ (l3*sin(Theta3-Theta2)); Alfa2=(-Omiga1^2*l1*cos(Theta1-Theta3)+Omiga3.^2*l3-Omiga2.^2*l2.*cos(Theta2-Theta3))./ (l2*sin(Theta2-Theta3)); Alfa4=(l5.*Alfa3.*cos(Theta31)+l4.*Omiga4.^2.*sin(Theta4)-l5.*Omiga3.^2.*sin(Theta31))./(l4. *cos(Theta4)); Af=(-l5).*Omiga3.^2.*cos(Theta31)+l4.*(Omiga4.^2.*cos(Theta4)+Alfa4.*sin(Theta4))-l5.*Alfa 3.*sin(Theta31); %绘图 Theta1=Theta1*180/pi;
第一章 平面机构的运动简图及自由度习题
第一章平面机构的运动简图及自由度 一、判断题(认为正确的,在括号内画√,反之画×) 1.机构是由两个以上构件组成的。() 2.运动副的主要特征是两个构件以点、线、面的形式相接触。() 3.机构具有确定相对运动的条件是机构的自由度大于零。() 4.转动副限制了构件的转动自由度。() 5.固定构件(机架)是机构不可缺少的组成部分。() 6.4个构件在一处铰接,则构成4个转动副。() 7.机构的运动不确定,就是指机构不能具有相对运动。() 8.虚约束对机构的运动不起作用。() 二、选择题 1.为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。 A.构件数、运动副的类型及数目 B.构件的运动尺寸 C.机架和原动件 D. A 和 B 和 C 2.下面对机构虚约束的描述中,不正确的是()。 A.机构中对运动不起独立限制作用的重复约束称为虚约束,在计算机构自由度时应除去虚约束。 B.虚约束可提高构件的强度、刚度、平稳性和机构工作的可靠性等。 C.虚约束应满足某些特殊的凡何条件,否则虚约束会变成实约束而影响机构的正常运动。为此应规定相应的制造精度要求。虚约束还使机器的结构复杂,成本增加。 D.设计机器时,在满足使用要求的情况卜,含有的虚约束越多越好。 三、综合题 1.图2-1中构件1相对于构件2能沿切向At 移动,沿法向An向上移动和绕接触点A转动,所以构件1与2组成的运动副保留三个相对运动。 图b中构件1与2在A两处接触,所以构件1与2组成两个高副。 图2-1 图2-2 2.如图2-2所示的曲轴1与机座2,曲轴两端中心线不重合,加工误差为△,试问装配后两构件能否相对转动,并说明理由。 3.局部自由度不影响整个机构运动,虚约束不限制构件独立运动,为什么实际机构中还采用局部自由度、虚约束的结构? 4.吊扇的扇叶与吊架、书桌的桌身与抽斗,机车直线运动时的车轮与路轨,各组成哪一类运动副,请分别画出。 5.绘制2-3图示各机构的运动简图。
平面连杆机构运动分析
平面连杆机构运动分析
大作业(一) 平面连杆机构的运动分析 班级: 姓名:姓名:姓名: 指导教师: 完成日期:
一、题目及原始数据 1.1、平面连杆机构的运动分析题目: 如图1.1所示,为一平面六杆机构。设已知各构件的尺寸如表 1.1 所示, 又知原动件1以等角速度1ω= 1rad/s 沿逆时针方向回转,试求各从动件的角位移、角速度及角加速度以及位移E 点的位移、速度及加速度的变化情况。 表1.1 平面六杆机构的尺寸参数 2'l =65mm,G x =153.5mm,G y =41.7mm 题 号 1l 2l 3l 4l 5l 6l α A B C 1-A 105.6 67.5 87.5 34.4 25 60° 1l =26. 5 1l =24 1l =29. 5 算出原动件从 0o到 360o时(计算点数 N=36)所要求各运动变量的大小,并绘出各组应的运动线图以及 E 点的轨迹曲线。 图1.1 二、平面连杆机构运动分析方程 2.1、位移方程: 4312l4cos cos l1cos 0h θθθ--=
43311l4sin s sin l1sin 0h θθθ+--= 43l4cos l3cos s c 0θθ+-?= 43l4sin l3 sin h 0θθ+-= []3 43c v v ωω 2.2、速度方程: 34333 4331434 3 cos l4sin s sin 0sin l4cos s cos 0V 0l4sin l3sin 10 l4cos l3cos 0θθθθ θθθθθθ--????? ?=??---???? []211V l1sin l1cos 00θθ=- []3343V c v v ωω= 3V V1\V2= 2.3、加速度方程: 3344333333 4433333 111443344 33 sin 14cos v sin s cos 014sin ?v cos s sin 0014cos 13cos 00 14sin 13sin 0A ωθωθθωθω ωθθωθωθωθωθωθ+????--+? ?=?????? []112343c A =v v ωω 11111112A A A =? []1211A l1cos l1sin 00θθ=-- 11112A A A =+ []3343A a c a γγ= 321A A \A =
平面机构的运动分析
平面机构的运动分析 (总分:100.00,做题时间:90分钟) 一、{{B}}填空题{{/B}}(总题数:10,分数:20.00) 1.速度瞬心可以定义为互作平面相对运动的两构件上 1的点。 (分数:2.00) 填空项1:__________________ (正确答案:瞬时相对速度为零(或瞬时绝对速度相同)) 解析: 2.相对瞬心与绝对瞬心的相同点是______,不同点是______;在由N个构件组成的机构中,有______个相对瞬心,有______个绝对瞬心。 (分数:2.00) 填空项1:__________________ (正确答案:互作平面相对运动的两构件上瞬时相对速度为零的点后者绝对速度为零,前者不是 (N-1)/(N/2-1) N-1) 解析: 3.作平面相对运动的三个构件的三个瞬心必 1。 (分数:2.00) 填空项1:__________________ (正确答案:在同一直线上) 解析: 4.在矢量方程图解法中,影像原理只适用于求______。 (分数:2.00) 填空项1:__________________ (正确答案:同一构件上不同点的速度加速度) 解析: 5.平面四杆机构共有______个速度瞬心,其中______个是绝对瞬心。 (分数:2.00) 填空项1:__________________ (正确答案:6 2) 解析: 6.当两构件组成回转副时,其瞬心是 1。 (分数:2.00) 填空项1:__________________ (正确答案:回转副中心) 解析: 7.当两构件不直接组成运动副时,瞬心位置用 1确定。 (分数:2.00) 填空项1:__________________ (正确答案:三心定理) 解析: 8.当两构件的相对运动为______动,牵连运动为______动时,两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为______,方向与______的方向一致。 (分数:2.00) 填空项1:__________________ (正确答案:移转 [*] 将v C2C1沿ω1转90°) 解析: 9.当两构件组成转动副时,其相对速度瞬心在______处;组成移动副时,其瞬心在______处;组成兼有滑动和滚动的高副时,其瞬心在______处。 (分数:2.00) 填空项1:__________________ (正确答案:转动副中心移动方向的垂线上无穷远处接触点处公法线上)解析: 10.速度影像的相似原理只能应用于______的各点,而不能应用于______的各点。 (分数:2.00) 填空项1:__________________ (正确答案:同一构件上不同构件上) 解析:
平面机构的运动分析
第三章平面机构的运动分析 教学目的:(1)能用速度瞬心法对平面机构进行速度分析; (2)了解矢量方程图解法对Ⅱ级机构进行运动分析; (3)了解解析法对Ⅱ级机构进行运动分析。 课时安排:2h 重点难点:重点—平面机构速度瞬心的求法及应用。 §3-1 机构运动分析的目的和方法 一、机构运动分析的目的 运动分析:就是对机构的位移(包括轨迹)、速度和加速度进行分析。 位移分析:可以确定机构运动时所需的空间;判断各构件之间是否会互相干涉;确定机构中从动件的行程;考察构件上某一点能否实现预定的位置或轨迹要求。 速度分析:可以了解从动件的速度变化规律能否满足工作要求;还是加速度分析的必要前提。 加速度分析:是计算构件惯性力和研究机械动力性能的必要前提。 二、机构运动分析的方法 1.图解法:速度瞬心法、矢量方程图解法 2.解析法: 按所使用的数学工具分:方程矢量法、矩阵法、复数矢量法 按机构运动分析的本质:针对不同机构建立适合该机构的具体数学模型;把机构视为一个质点,以杆长为约束建立非线性方程,进行求解;基于机构组成原理的杆组法。 §3-2 用速度瞬心法作机构的速度分析 一、速度瞬心 速度瞬心:相互作平面相对运动的两构件在任意瞬时其相对运动速度为 零的重合点。 瞬心的分类:按瞬心的绝对速度是否为零可分为两种:绝对瞬心(绝对 速度为零的瞬心)和相对瞬心(绝对速度不为零的瞬心)。 二、机构中瞬心的数目 每两个构件存在一个瞬心,设由n个构件组成的机构总的瞬心数为N, 根据排列组合可得:2(1) 2 n n n N C - == 三、机构中瞬心位置的确定 1.通过运动副直接相联的两构件的瞬心1)以转动副相联接的两构件的瞬心 2)以移动副相联接的两构件的瞬心 3)以平面高副相联接的两构件的瞬心
第三章平面机构的运动分析习题与答案
第三章 平面机构的运动分析 1 机构运动分析包括哪些容? 2 对机构进行运动分析的目的是什么? 3 什么叫速度瞬心? 4 相对速度瞬心和绝对速度瞬心有什么区别? 5 在进行机构运动分析时,速度瞬心法的优点及局限是什么? 6 什么叫三心定理? 7 怎样确定组成转动副、移动副、高副的两构件的瞬心?怎样确定机构中不组成运动副的两构件的瞬心? 8 在同一构件上两点的速度和加速度之间有什么关系? 9组成移动副两平面运动构件在瞬时重合点上的速度和加速度之间有什么关系? 10 平面机构的速度和加速度多边形有何特性? 11 什么叫“速度影像”和“加速度影像”,它在速度和加速度分析中有何用处? 12 机构运动时在什么情况下有哥氏加速度出现?它的大小及方向如何决定? 13 如何根据速度和加速度多边形确定构件的角速度和角加速度的大小和方向? 14 如何确定构件上某点法向加速度的大小和方向? 15 当某一机构改换原动件时,其速度多边形是否改变?其加速度多边形是否改变? 16 什么叫运动线图?它在机构运动分析时有什么优点? 17 当两构件组成转动副时,其相对速度瞬心在 处;组成移动副时,其瞬心在 处;组成滑动兼滚动的高副时,其瞬心在 处. 18相对瞬心与绝对瞬心相同点是 ,而不同点是 . 19速度影像的相似原理只能用于 两点,而不能用于机构 的各点. 20速度瞬心可以定义为互相作平面相对运动的两构件上 的点. 21 3个彼此作平面平行运动的构件共有 个速度瞬心,这几个瞬心必位于 .含有6个构件的平面机构,其速度瞬心共有 个,其中 个是绝对瞬心,有 个相对瞬心. 22 在图示机构中,已知原动件1以匀角速度ω1 沿逆时针方向转动,试确定:(1)机构的全部瞬心;(2)构件3的速度v 3(需写出表达式)。 23如图所示齿轮-连杆机构中,已知齿轮2和5的齿数相等,即25z z =,齿轮2以
第三章平面机构的运动分析习题与答案
第三章平面机构的运动分析 1 机构运动分析包括哪些内容 2 对机构进行运动分析的目的是什么 3 什么叫速度瞬心 4 相对速度瞬心和绝对速度瞬心有什么区别 5 在进行机构运动分析时,速度瞬心法的优点及局限是什么 6 什么叫三心定理 7 怎样确定组成转动副、移动副、高副的两构件的瞬心怎样确定机构中不组成运动副的两构件的瞬心 8 在同一构件上两点的速度和加速度之间有什么关系 9组成移动副两平面运动构件在瞬时重合点上的速度和加速度之间有什么关系 10 平面机构的速度和加速度多边形有何特性 11 什么叫“速度影像”和“加速度影像”,它在速度和加速度分析中有何用处 12 机构运动时在什么情况下有哥氏加速度出现它的大小及方向如何决定 13 如何根据速度和加速度多边形确定构件的角速度和角加速度的大小和方向 14 如何确定构件上某点法向加速度的大小和方向 15 当某一机构改换原动件时,其速度多边形是否改变其加速度多边形是否改变 16 什么叫运动线图它在机构运动分析时有什么优点 17 当两构件组成转动副时,其相对速度瞬心在处;组成移动副时,其瞬心在处;组成滑动兼滚动的高副时,其瞬心在处. 18相对瞬心与绝对瞬心相同点是 ,而不同点是 . 19速度影像的相似原理只能用于两点,而不能用于机构的各点. 20速度瞬心可以定义为互相作平面相对运动的两构件上的点. 21 3个彼此作平面平行运动的构件共有个速度瞬心,这几个瞬心必位于 .含有6个构件的平面机构,其速度瞬心共有个,其中个是绝对瞬心,有个相对瞬心. 22 在图示机构中,已知原动件1以匀角速度?沿逆时针方向转动,试确定:(1)机构的全部瞬心;(2)构件3的速度v3(需写出表达式)。