机器学习SVM习题集
SVM
1.判断题
(1) 在SVM训练好后,我们可以抛弃非支持向量的样本点,仍然可以对新样本进行分类。(T)
(2) SVM对噪声(如来自其他分布的噪声样本)鲁棒。(F)
2.简答题
现有一个点能被正确分类且远离决策边界。如果将该点加入到训练集,为什么SVM的决策边界不受其影响,而已经学好的logistic回归会受影响?
答:因为SVM采用的是hinge loss,当样本点被正确分类且远离决策边界时,SVM给该样本的权重为0,所以加入该样本决策边界不受影响。而logistic回归采用的是log损失,还是会给该样本一个小小的权重。
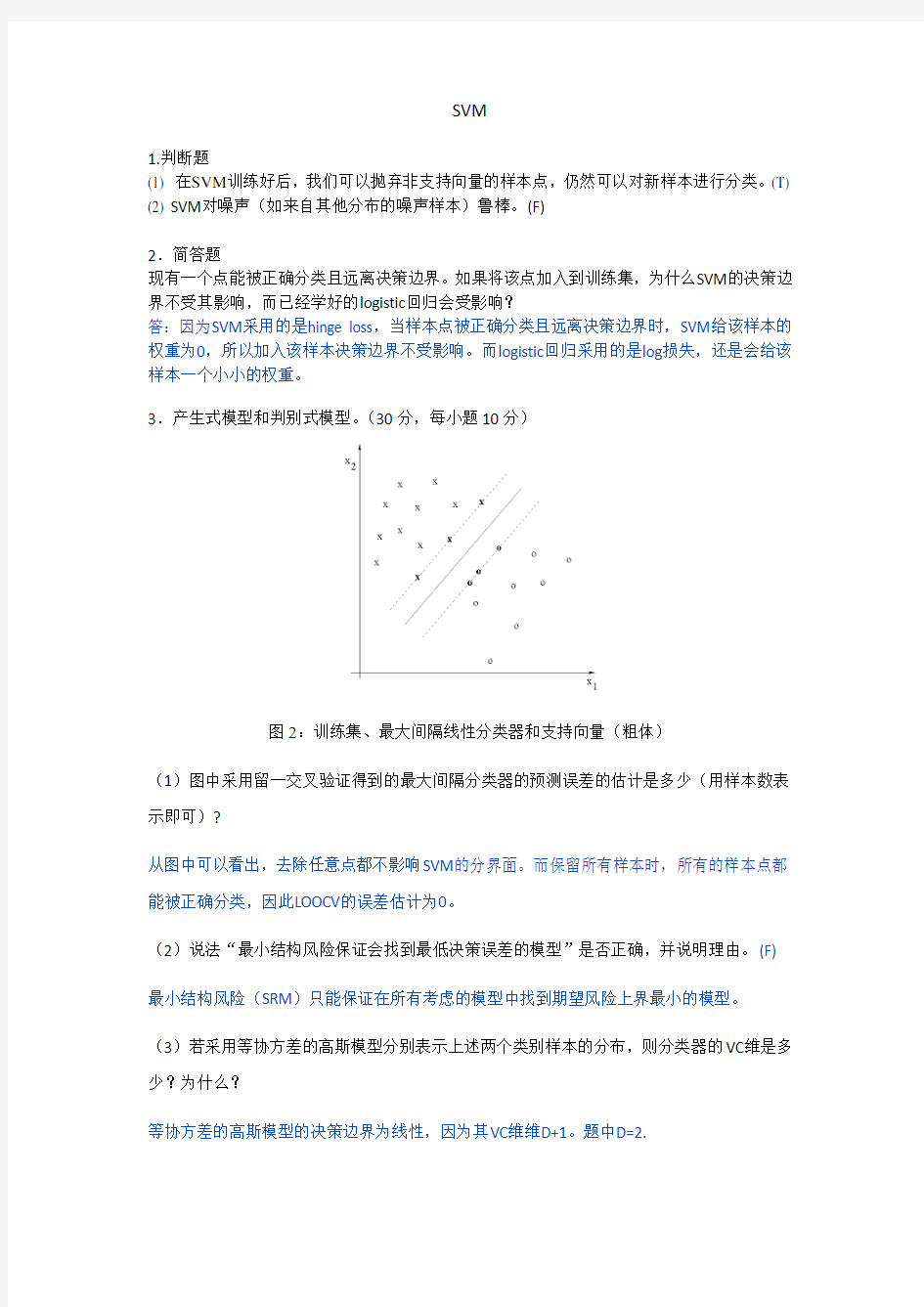
3.产生式模型和判别式模型。(30分,每小题10分)
图2:训练集、最大间隔线性分类器和支持向量(粗体)
(1)图中采用留一交叉验证得到的最大间隔分类器的预测误差的估计是多少(用样本数表示即可)?
从图中可以看出,去除任意点都不影响SVM的分界面。而保留所有样本时,所有的样本点都能被正确分类,因此LOOCV的误差估计为0。
(2)说法“最小结构风险保证会找到最低决策误差的模型”是否正确,并说明理由。(F)
最小结构风险(SRM)只能保证在所有考虑的模型中找到期望风险上界最小的模型。
(3)若采用等协方差的高斯模型分别表示上述两个类别样本的分布,则分类器的VC维是多少?为什么?
等协方差的高斯模型的决策边界为线性,因为其VC维维D+1。题中D=2.
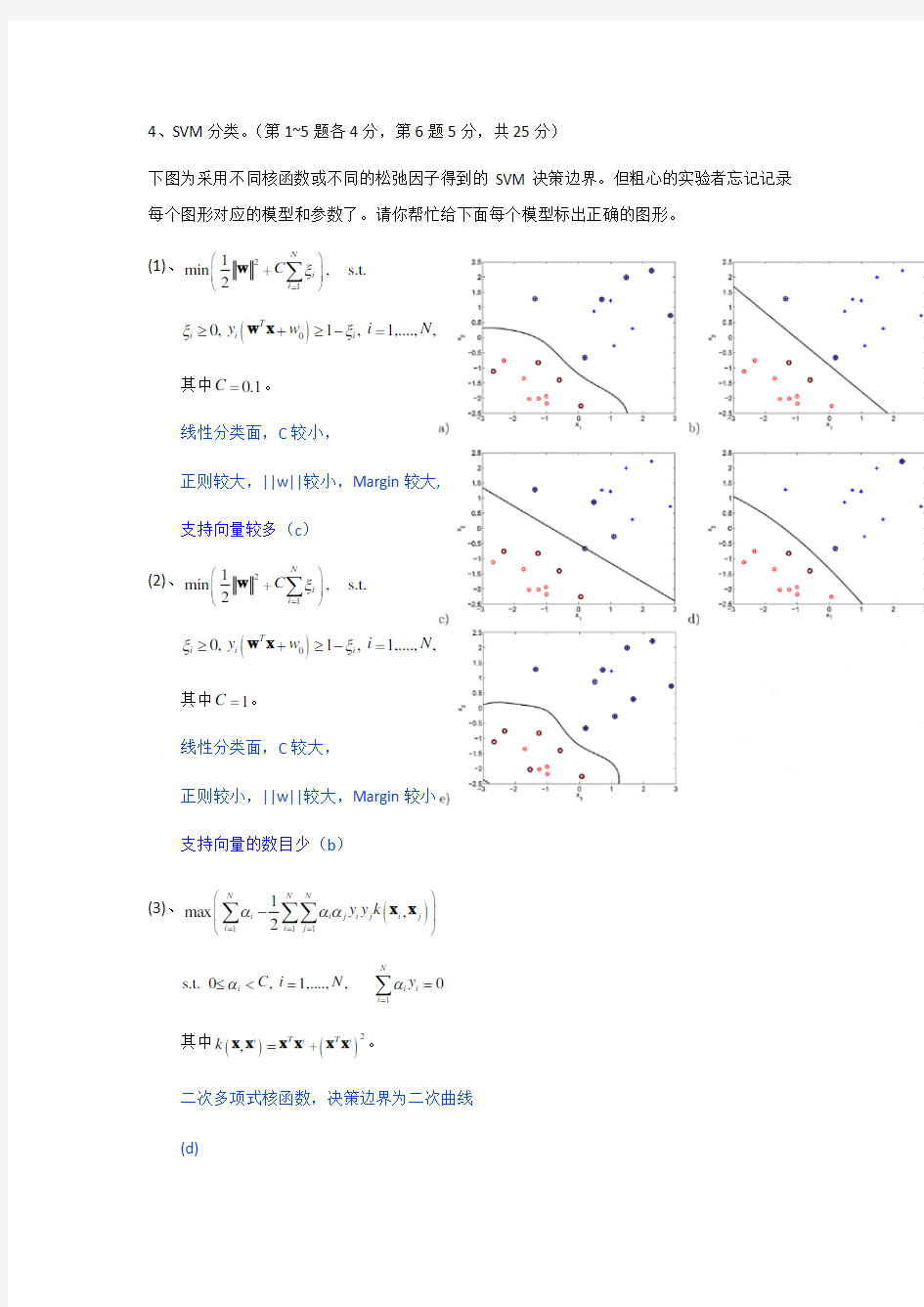
4、SVM 分类。(第1~5题各4分,第6题5分,共25分)
下图为采用不同核函数或不同的松弛因子得到的SVM 决策边界。但粗心的实验者忘记记录每个图形对应的模型和参数了。请你帮忙给下面每个模型标出正确的图形。
(1)、211min , s.t.2N
i i C ξ=??+ ?
??
∑w
()00, 1, 1,....,, T i i i y w i N ξξ≥+≥-=w x
其中0.1C =。 线性分类面,C 较小,
正则较大,||w||较小,Margin 较大, 支持向量较多(c )
(2)、211min , s.t.2N
i i C ξ=??+ ?
??
∑w
()00, 1, 1,....,, T i i i y w i N ξξ≥+≥-=w x
其中1C =。
线性分类面,C 较大,
正则较小,||w||较大,Margin 较小 支持向量的数目少(b )
(3)、()111
1max ,2N N N i i j i j i j i i j y y k ααα===??
- ???
∑∑∑x x
1
s.t. 0, 1,....,, 0N
i i i i C i N y αα=≤<==∑
其中()()2
,T T k '''=+x x x x x x 。
二次多项式核函数,决策边界为二次曲线 (d)
(4)、()111
1max ,2N N N i i j i j i j i i j y y k ααα===??- ???
∑∑∑x x 1
s.t. 0, 1,....,, 0N
i i i i C i N y αα=≤<==∑
其中()21,exp 2k ??''=-- ???
x x x x 。
RBF 核函数,决策边界为曲线, σ=1较大,曲线更平滑 (a)
(5)、()111
1max ,2N N N i i j i j i j i i j y y k ααα===??- ???
∑∑∑x x 1
s.t. 0, 1,....,, 0N
i i i i C i N y αα=≤<==∑
其中()()
2,exp k ''=--x x x x 。 RBF 核函数,决策边界为曲线, σ=sqrt(1/2)较小,曲线更弯曲 (e)
(6)考虑带松弛因子的线性
SVM
分类器:211min , s.t.
2N
i i C ξ=??+ ?
??
∑w ()00, 1, 1,....,, T i i i y w i N ξξ≥+≥-=w x 下面有一些关于某些变量随参数C 的增大而变化的表
述。如果表述总是成立,标示“是”;如果表述总是不成立,标示“否”;如果表述的正确性取决于C 增大的具体情况,标示“不一定”。
(1) 0w 不会增大 (不一定)
(2) ?w 增大
(不一定)
(3) ?w 不会减小
(是)
(4) 会有更多的训练样本被分错(否)
(5) 间隔(Margin)不会增大(是)
5、考虑带松弛因子的线性SVM 分类器:()2
T 011min , s.t. 1, 2N
i i i i i C y w i ξξ=??++≥-? ???
∑w w x 。
在下图中,0.1, 1, 10, 100C =,并且已经标出分界面和支持向量。请给每幅图标出最可能的C 的取值,并分析原因(20分)。
答:
()2
T 01, subject to 1, 2
i i i i i
C y w i ξξ+
+≥-?∑w w x 等价于
()2
T 01, subject to 1, 2i i i i i
y w i C
ξξ+
+≥-?∑w w x 所以2
2
1, ,
C ↑↑↓w w
,即margin 减小(当C 增大到一定程度时,Margin 不再变化),不
允许错分太多样本(对错分样本的惩罚大),支持向量(落在Margin 内的样本和错分的样本)的数目减少。
6. SVM
(1) 下面的情况,适合用原SVM 求解还是用对偶SVM 求解。 1) 特征变换将特征从D 维变换到无穷维。(对偶)
2) 特征变换将特征从D 维变换到2D 维,训练数据有上亿个并且线性可分。(原)
(2) 在线性可分情况下,在原问题形式化中怎样确定一个样本为支持向量?
在原问题中,给出了w ,w 0,支持向量满足:()
*
*01T i i y w x +=w 。
7.SVM 和松弛因子。
考虑如图给出的训练样本,我们采用二次多项式做为核函数,松弛因子为C 。请对下列问题做出定性分析,并用一两句话给出原因。
(1) 当C →∞时,决策边界会变成什么样?
答:当C 很大时,错分样本的惩罚会非常大,因此模型会尽可能将样本分对。(记住这里决策边界为二次曲面)
C →∞ C →0
(2) 当C →0时,决策边界会变成什么样? 可以错分少量样本,但Margin 大
(3) 你认为上述两种情况,哪个在实际测试时效果会好些?
我们不能过于相信某个特定的样本,因此C →0的效果会好些,因为它最大化样本云团之间的Margin.
(4) 在图中增加一个点,使得当C →∞时,决策边界会不变。
能被原来的分类器正确分类,不会是支持向量。
(5) 在图中增加一个点,使得当C ∞时,该点会显著影响决策边界。
能被原来的分类器正确分类,不会是支持向量。
当C 很大时,错分样本的惩罚会非常大,因此增加一个不能被原来分类器正确分类的样本会影响决策边界。
8.对outlier 的敏感性。
我们知道在SVM 用于回归时,等价于采用ε不敏感的损失函数(如下图所示),即SVM 的目标为:
()()()2,,1
1?min ,2..0,0
N
i i
i i i i i i i i i C s t
y f y f ξξεξεξξξ+-+-
=+-
+-=++≤++≥--≥≥∑w ξξw w x x 。
课堂已经讨论L2损失对outliers 比较敏感,而L1损失和huber 损失相对不敏感些。 (1) 请说明为什么L2损失比较L1损失对outliers 更敏感。
Outlier 为离群点,因此其预测残差r 会比较大。L2损失为残差r 的平方r 2,L1损失为残差r 的绝对值|r|。当r>1时,r 2>|r|,从而L2损失在outliter 样本点的值会非常大,对结果影响更大。
(2) 请给出一个outlier 影响预测子的例子。
(3) 相比于L2损失和L1损失,分析SVM 的ε不敏感的损失函数对outliers 敏感性。
ε不敏感的损失函数对outliers 的敏感性更接近于L1损失,因此比L2损失更不敏感。初看起来,ε不敏感的损失函数在区间[-ε,ε]不施加惩罚,似乎比L1对outliers 更不敏感。但实际上outliers 对应的残差通常很大,所以不会落在区间[-ε,ε],所以ε不敏感的损失函数对outliers 的敏感性和L1损失相似。
(4) SVM 也等价于MAP 估计,则该MAP 估计对应的先验和似然是什么?
同岭回归类似,先验为0均值得高斯分布,但方差为2C ,同时各维独立,即
()()0,2j
p C =∏w N ,
似然函数在区间[-ε,ε]为常数,其他地方为Laplace 分布:
()()
10
22|,1exp 22T T y p y y otherwise
εεε
?
-≤??+=?
?---?+?w x w x w x
9. 多个数据源的SVM
假设你在两天内用两个不同的仪器收集了两批数据,你觉得数据集1标签的可信度为数据集2的两倍。 我们分别用(){}
1
11
,N i
i
i y ==
x D 表示数据集1,(){}
2
21
,N i
i
i v ==
u D 表示数据集2,数据集1的松弛
因子表示为ξ,数据集2的松弛因子表示ζ,二者的Lagrange 乘子分别表示为α和β。 关于怎样处理这两批数据,你的朋友们给出了不同的建议。 张三:将数据集1的松弛惩罚乘以2,因此优化问题为:
(){}(){}{}{}11
2
,,11
T 01T 02121min 22subject to
1, 1,2.,,,,, 1, 1,2.,,,,,
0, 1,2.,,,,, 0, 1,2.,,,,,
N N i j i j i i i j j j i j C C y w i N v w j N i N j N ξ?ξ?ξ?ξ?==+++≥-?∈+≥-?∈≥?∈≥?∈∑∑w w w x w u
李四:将数据集1的Lagrange 乘子乘以2,因此优化问题为:
{}{}121112
22
1
2
11111111121
1
1max 22αα,2α,,2subject to
20, 1,2.,,,,, 0, 1,2.,,,,,
20
N N N N N N N N i j i j i j i j i j i j i j i j i j i j i j i j i j i j i j N N i i
j
j
i j C C y y y v v v c i N c j N y v
αββββαβαβ==========+---≥≥?∈≥≥?∈+=∑∑∑∑∑∑∑∑∑∑α,βx x x u u u
王五:将数据集1的数据点复制一份(即数据集1中的每个样本点变成2个),然后照常处理。
问题:请说明上述处理是否等价(得到的分界面相同)。
解:我们从张三的建议的对偶表示开始,即
()()()
()()
{}{}12
1
2
12
2
011
T
T
001
1
1
1
121,,,,22 11subject to
1,2.,,,,, 1,2.,,,,,
0, 0, 0N N i j
i j N N N N i i i i i i i i i i i i
i i i i i j i L w C C y w v w e f i N j N e ξ?αξβ?ξ?αβ=======++-+-+-+-+---?∈?∈≥≥≥∑∑∑∑∑∑αβe,f w w w x w u (){}(){}()()T 01T 02T
0T 0, 0
1, 1,2.,,,,, 1, 1,2.,,,,, 0, 0
10,10
j i i i j j j i i j j i i i i j j j j f y w i N v w j N e f y w v w ξ?ξ?αξβ?≥+≥-?∈+≥-?∈==??+-+=????+-+=??w x w u w x w u
优化0,,w e,f w ,目标函数对0,,w e,f w 求导等于0,
12
11
0N N i i i i i i i i L y v αβ*
==?=?=+?∑∑w x u w ,(1) 1211
000N N i i i i i i L
y v w αβ==?=?+=?∑∑, (2) 02i i i
L
C e αξ?=?=-?, (3) 0i i i
L
C f β??=?=-?, (4) 由于有约束0, 0, 0, 0 i j i j e f αβ≥≥≥≥,公式(3)(4)变成 20, 0,
i j c c αβ≥≥≥≥。
将上述公式代入L ,消除0,,,i j w ξ?w ,得到对偶表示:
(
){}{}1
2
1112
22
1
2
111111
11121
1
11,αα,α,,22subject to
20, 1,2.,,,,, 0, 1,2.,,,,,
20
N N N N N N N N i j i j i j i j i j i j i j i j i j i j
i j i j i j i j i j N N i i
j
j
i j L C C y y y v v v c i N c j N y v
αββββαβαβ===========+---≥≥?∈≥≥?∈+=∑∑∑∑∑∑∑∑∑∑αβx x x u u u 可以看出,这和下面李四的建议不同。
{}{}1
2
1
1
1
2
22
1
2
1
1
11
11
11
121
1
1max 22αα,2α,,2subject to
20, 1,2.,,,,, 0, 1,2.,,,,,
20
N N N N N N N N i j i j i j i j i j i j i j
i j i j i j i j i j i j i j i j N N i i
j
j
i j C C y y y v v v c i N c j N y v
αββββαβαβ==========+---≥≥?∈≥≥?∈+=∑∑∑∑∑∑∑∑∑∑α,β
x x x u u u
王五的建议如下,
111
2
,,111
1min 2N N N i i j i i j C C C ξ?ξξ?===+++∑∑∑w w , 和张三的建议相同,即张三 = 王五。
机器人的动力学控制
机器人的动力学控制 The dynamics of robot control 自123班 庞悦 3120411054
机器人的动力学控制 摘要:机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算法。机器人动力学主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。本文使用MATLAB 来对两关节机器人模型进行仿真,进而对两关节机器人进行轨迹规划,来举例说明独立PD 控制在机器人动力学控制中的重要作用。 Abstract: for the robot dynamics is to study the relation between the force and movement and balance of the subject.Robot dynamics is a complex dynamic system, on the dynamic response of the processing object depending on the robot dynamics model and control algorithm.Kinetics of robot research dynamics problem and inverse problem of two aspects, the need to adopt strict system method for the analysis of robot dynamics.This article USES MATLAB to simulate two joints, the robot, in turn, the two joints, the robot trajectory planning, to illustrate the independent PD control plays an important part in robot dynamic control. 一 动力学概念 机器人的动力学主要是研究动力学正问题和动力学逆问题两个方面,再进一步研究机器人的关节力矩,使机器人的机械臂运动到指定位臵,其控制算法一共有三种:独立PD 控制,前馈控制和计算力矩控制,本文主要介绍独立PD 控制。 动力学方程:)()(),()(q G q F q q q C q q M +++=? ????τ
二自由度机械臂动力学分析培训资料
二自由度机械臂动力 学分析
平面二自由度机械臂动力学分析 姓名:黄辉龙 专业年级:13级机电 单位:汕头大学 摘要:机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过分析,得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 关键字:平面二自由度 动力学方程 拉格朗日方程 相关介绍 机器人动力学的研究有牛顿-欧拉(Newton-Euler )法、拉格朗日 (Langrange)法、高斯(Gauss )法等,但一般在构建机器人动力学方程中,多采用牛顿-欧拉法及拉格朗日法。 欧拉方程又称牛顿-欧拉方程,应用欧拉方程建立机器人机构的动力学方程是指研究构件质心的运动使用牛顿方程,研究相对于构件质心的转动使用欧拉方程,欧拉方程表征了力、力矩、惯性张量和加速度之间的关系。 在机器人的动力学研究中,主要应用拉格朗日方程建立机器人的动力学方程,这类方程可直接表示为系统控制输入的函数,若采用齐次坐标,递推的拉格朗日方程也可以建立比较方便且有效的动力学方程。 在求解机器人动力学方程过程中,其问题有两类: 1)给出已知轨迹点上? ??θθθ、及、 ,即机器人关节位置、速度和加速度,求相应的关节力矩矢量τ。这对实现机器人动态控制是相当有用的。 2)已知关节驱动力矩,求机器人系统相应各瞬时的运动。也就是说,给出关节力矩矢量τ,求机器人所产生的运动? ??θθθ、及、 。这对模拟机器人的运动是非常有用的。 平面二自由度机械臂动力学方程分析及推导过程 1、机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: 1) 选取坐标系,选定完全而且独立的广义关节变量n r ,,2,1,r ???=θ。 2) 选定相应关节上的广义力r F :当r θ是位移变量时,r F 为力;当r θ是角度变量时,r F 为力矩。 3)求出机器人各构件的动能和势能,构造拉格朗日函数。 4) 代入拉格朗日方程求得机器人系统的动力学方程。 2、下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
简单串联机器人ADAMS仿真
机械系统动力学 简化串联机器人的运动学与动力学仿真分析 学院:机械工程学院 专业:机械设计制造 及其自动化 学生姓名: 学号: 指导教师: 完成日期: 2015.01.09
摘要 在机器人研究中,串联机器人研究得较为成熟,其具有结构简单、成本低、控制简单、运动空间大等优点,已成功应用于很多领域。本文在ADAMS 中用连杆模拟两自由度的串联机器人(机械臂),对其分别进行运动学分析、动力学分析。得出该机构在给出工作条件下的位移、速度、加速度曲线和关节末端的运动轨迹。 关键词:机器人;ADAMS;曲线;轨迹 一、ADAMS软件简介 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.) (现已并入美国MSC公司)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。 二、简化串联机器人的运动学仿真 (1)启动ADAMS/View。 在欢迎对话框中选择新建模型,模型取名为robot,并将单位设置为MMKS,然后单击OK。 (2)打开坐标系窗口。 按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗口。当鼠标在图形区移动时,在坐标窗口中显示了当前鼠标所在位置的坐标值。
机器人动力学汇总
机器人动力学研究的典型方法和应用 (燕山大学 机械工程学院) 摘 要:本文介绍了动力学分析的基础知识,总结了机器人动力学分析过程中比较常用的动力学分析的方法:牛顿—欧拉法、拉格朗日法、凯恩法、虚功原理法、微分几何原理法、旋量对偶数法、高斯方法等,并且介绍了各个方法的特点。并通过对PTl300型码垛机器人弹簧平衡机构动力学方法研究,详细分析了各个研究方法的优越性和方法的选择。 前 言:机器人动力学的目的是多方面的。机器人动力学主要是研究机器人机构的动力学。机器人机构包括机械结构和驱动装置,它是机器人的本体,也是机器人实现各种功能运动和操作任务的执行机构,同时也是机器人系统中被控制的对象。目前用计算机辅助方法建立和求解机器人机构的动力学模型是研究机器人动力学的主要方法。动力学研究的主要途径是建立和求解机器人的动力学模型。所谓动力学模指的是一组动力学方程(运动微分方程),把这样的模型作为研究力学和模拟运动的有效工具。 报告正文: (1)机器人动力学研究的方法 1)牛顿—欧拉法 应用牛顿—欧拉法来建立机器人机构的动力学方程,是指对质心的运动和转动分别用牛顿方程和欧拉方程。把机器人每个连杆(或称构件)看做一个刚体。如果已知连杆的表征质量分布和质心位置的惯量张量,那么,为了使连杆运动,必须使其加速或减速,这时所需的力和力矩是期望加速度和连杆质量及其分布的函数。牛顿—欧拉方程就表明力、力矩、惯性和加速度之间的相互关系。 若刚体的质量为m ,为使质心得到加速度a 所必须的作用在质心的力为F ,则按牛顿方程有:ma F = 为使刚体得到角速度ω、角加速度εω= 的转动,必须在刚体上作用一力矩M , 则按欧拉方程有:εωI I M += 式中,F 、a 、M 、ω、ε都是三维矢量;I 为刚体相对于原点通过质心并与刚
二自由度机器人的位置控制
实验二自由度机器人的位置控制 一、实验目的 1. 运用Matlab语言、Simulink及Robot工具箱,搭建二自由度机器人的几何模 型、动力学模型, 2. 构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控 制,并达到较好控制效果。 二、工具软件 1.Matlab软件 2.Simulink动态仿真环境 3.robot工具箱 模型可以和实际中一样,有自己的质量、质心、长度以及转动惯量等,但需要注意的是它所描述的模型是理想的模型,即质量均匀。这个工具箱还支持Simulink的功能,因此,可以根据需要建立流程图,这样就可以使仿真比较明了。 把robot 工具箱拷贝到MATLAB/toolbox文件夹后,打开matalb软件,点击file--set path,在打开的对话框中选add with subfolders,选中添加MATLAB/toolbox/robot,保存。这是在matlab命令窗口键入roblocks就会弹出robot 工具箱中的模块(如下图)。
三、实验原理 在本次仿真实验中,主要任务是实现对二自由度机器人的控制,那么首先就要创建二自由度机器人对象, 二自由度机器人坐标配置 仿真参数如下表1: 表1 二连杆参数配置
1.运动学模型构建二连杆的运动学模型,搭建twolink模型在MATLAB命令窗口下用函数drivebot(WJB)即可观察到该二连杆的动态位姿图。 %文件名命名为自己名字的首字母_twolink %构造连杆一 L{1}=link([0 0.45 0 0 0],'standard') ; L{1}.m=23.9 ;
机器人机械臂运动学分析(仅供借鉴)
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
第3章 工业机器人静力学及动力学分析概要
注:1)2008年春季讲课用;2)带下划线的黑体字为板书内容;3)公式及带波浪线的部分为必讲内容第3章工业机器人静力学及动力学分析 3.1 引言 在第2章中,我们只讨论了工业机器人的位移关系,还未涉及到力、速度、加速度。由理论力学的知识我们知道,动力学研究的是物体的运动和受力之间的关系。要对工业机器人进行合理的设计与性能分析,在使用中实现动态性能良好的实时控制,就需要对工业机器人的动力学进行分析。在本章中,我们将介绍工业机器人在实际作业中遇到的静力学和动力学问题,为以后“工业机器人控制”等章的学习打下一个基础。 在后面的叙述中,我们所说的力或力矩都是“广义的”,包括力和力矩。 工业机器人作业时,在工业机器人与环境之间存在着相互作用力。外界对手部(或末端操作器)的作用力将导致各关节产生相应的作用力。假定工业机器人各关节“锁住”,关节的“锁定用”力与外界环境施加给手部的作用力取得静力学平衡。工业机器人静力学就是分析手部上的作用力与各关节“锁定用”力之间的平衡关系,从而根据外界环境在手部上的作用力求出各关节的“锁定用”力,或者根据已知的关节驱动力求解出手部的输出力。 关节的驱动力与手部施加的力之间的关系是工业机器人操作臂力控制的基础,也是利用达朗贝尔原理解决工业机器人动力学问题的基础。 工业机器人动力学问题有两类:(1)动力学正问题——已知关节的驱动力,求工业机器人系统相应的运动参数,包括关节位移、速度和加速度。(2)动力学逆问题——已知运动轨迹点上的关节位移、速度和加速度,求出相应的关节力矩。 研究工业机器人动力学的目的是多方面的。动力学正问题对工业机器人运动仿真是非常有用的。动力学逆问题对实现工业机器人实时控制是相当有用的。利用动力学模型,实现最优控制,以期达到良好的动态性能和最优指标。 工业机器人动力学模型主要用于工业机器人的设计和离线编程。在设计中需根据连杆质量、运动学和动力学参数,传动机构特征和负载大小进行动态仿真,对其性能进行分析,从而决定工业机器人的结构参数和传动方案,验算设计方案的合理性和可行性。在离线编程时,为了估计工业机器人高速运动引起的动载荷和路径偏差,要进行路径控制仿真和动态模型的仿真。这些都必须以工业机器人动力学模型为基础。 工业机器人是一个非线性的复杂的动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间。因此,简化求解过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 在这一章里,我们将首先讨论与工业机器人速度和静力学有关的雅可比矩阵,然后介绍工业机器人的静力学问题和动力学问题。