基于LabVIEW和PXI7358多轴运动控制卡的地震模拟振动台控制系统设计

基于LabVIEW和PXI-7358多轴运动控制卡的
地震模拟振动台控制系统设计
Control System Design for Earthquake Simulator Based on LabVIEW Software and PXI-7358 Multi-axis Motion Controller
作者:宫金良赵现朝高峰
单位:上海交通大学振动、冲击、噪声国家重点实验室
应用领域:
控制设计
使用的产品:
PXI-1042 机箱
PXI-8186 控制器
PXI-7358 运动控制卡
UMI-7774 通用运动控制接口
PXI-6511 工业数字I/0卡
LabVIEW 7.1
LabVIEW RT(实时模块)
Control Design and Simulation
Bundle
挑战:
短期内实现8台伺服电机的变参数同步控制,为并联机构的多电机控制应用提供解决方案,突破重载系统中的冗余输入技术难题,并实现快速响应。应用方案:
方案全部采用NI产品,以PXI-1042内嵌PXI-8186控制器为核心,硬件设计采用PXI-7358多轴运动控制卡和UMI-7774接口板驱动8个电机,采用LabVIEW 7.1软件的电子齿轮功能轻松实现其中两个电机的完全同步,并利用PID软件包的强大功能实现快速开发。
介绍:
地震模拟振动台是集激振、分析、测试为一体的技术,我们将其与并联机器人技术、冗余驱动技术相结合,研究开发了具有独立知识产权的DZ10型地震模拟振动台。基于PXI-7358运动控制卡和LabVIEW软件中的电子齿轮功
能,成功的解决了项目中的冗余驱动问
题,极大的降低了控制系统设计的难
度。功能强大的控制系统设计软件包提
高了设计的灵活性,有效的缩短了程序
开发周期。
序言:
地震模拟振动台是地震工程研究
的重要手段,是集激振系统、测试系统
和分析系统于一体的现代振动试验系
统。由于地震模拟振动台不仅负载量
大,而且能模拟天然地震波和人工地震
波,因此在原子能反应堆、海洋结构工
程、水工结构、堤岸结构和桥梁结构等
方面发挥着重要的作用。
传统的地震模拟振动台大都采用
液压驱动。液压驱动属于力封闭控制,
在多电机驱动时能够通过液压缸中液
体的自身弹性达到同步控制的目的。为
了消除液压系统带来的污染,减小制造
成本,我们提出采用冗余输入电机驱动
的地震模拟振动台,并设计了具有自主
知识产权的冗余驱动模块,该模块能将
两个输入通过机械方式转换为单输出。
地震模拟振动台的机构本体为一并联
机构,由8个伺服电机驱动以实现重载,
因此在控制系统设计上需要保证8个伺
服电机的同步和响应的快速性。
本系统以PXI-1042内嵌PXI-8186
控制器为核心,PXI-7358多轴运动控制
卡驱动8个电机,采用LabVIEW7.1软
件的电子齿轮功能实现其中两个电机
的完全同步。本系统从软件到硬件均
采用NI的产品,具有很好的集成性和
兼容性,并能够以最短的周期完成。
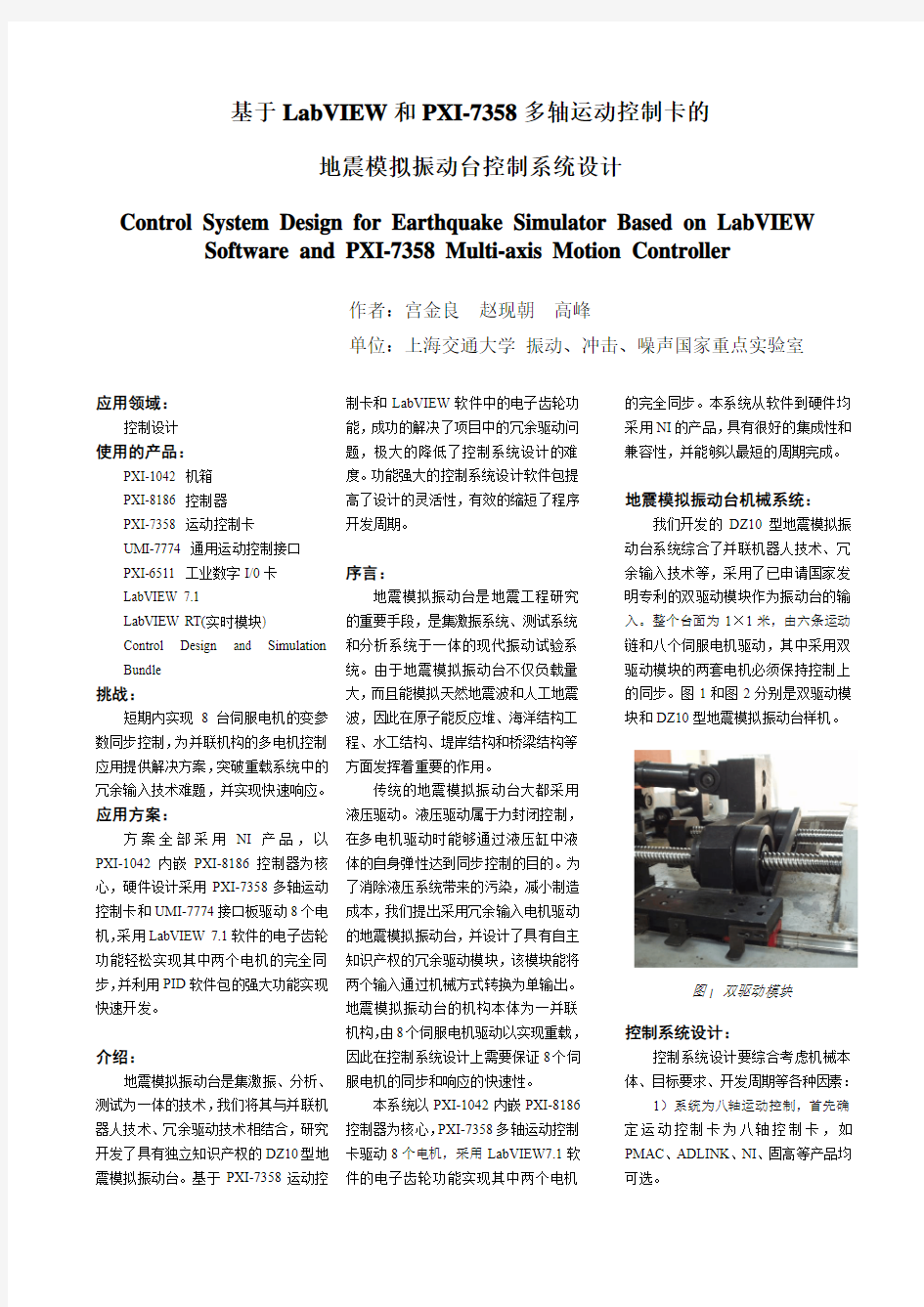
地震模拟振动台机械系统:
我们开发的DZ10型地震模拟振
动台系统综合了并联机器人技术、冗
余输入技术等,采用了已申请国家发
明专利的双驱动模块作为振动台的输
入。整个台面为1×1米,由六条运动
链和八个伺服电机驱动,其中采用双
驱动模块的两套电机必须保持控制上
的同步。图1和图2分别是双驱动模
块和DZ10型地震模拟振动台样机。
控制系统设计:
控制系统设计要综合考虑机械本
体、目标要求、开发周期等各种因素:
1)系统为八轴运动控制,首先确
定运动控制卡为八轴控制卡,如
PMAC、ADLINK、NI、固高等产品均
可选。
图1 双驱动模块
2)系统中的双驱动模块要求两个输入电机同步控制,为了简化设计,采用LabVIEW 软件中的电子齿轮功能是不错的选择。
3)与VC 、VB 相比,LabVIEW 软件及控制软件包提供了强大的PID 算法,数据分析,处理功能。
4)要能有效的缩短开发周期。显然,LabVIEW 图形化的编程语言对编程者要求很低,能使开发者集中于专业知识的应用。
最终确定本系统总体结构是基于开放式实时测试平台PXI-1042,以嵌入
式PXI-8186作为主控制器,内插NI 公司的PXI-7358运动控制卡实现8个伺服电机的运动控制,所有8个伺服轴为联动方式。NI 的7358运动控制卡和PXI-8186的通讯由PXI 插槽实现,因而具有很快的传输速度。
PXI-7358运动控制卡主要完成运动控制,而地震模拟振动台的输入输出信号等开关量,如操作按钮及状态指示等,则通过PXI-6511数字输入卡实现,最多具有64点的开关量I/O 。同时,由于PXI-7358运动控制卡本身具有回零、
正负限位控制等功能,因此各轴原点及
限位开关通过UMI-7774接口板卡直接连接到PXI-7358运动控制卡上。
PXI-7358运动控制卡对各伺服轴的控制是以速度指令输出的形式给出的,即伺服驱动器工作在速度随动状态,位置闭环则由PXI-7358运动控制卡完成,因此,位置检测码盘信号除接至伺服驱动器外,还需要接到PXI-7358运动控制卡上。系统硬件的结构如图3所示。
在实际施工时,由于交流伺服系统工作时(主要是逆变时)PWM 脉宽调制载波的干扰作用非常强,因此除了在电气系统上采取了相应的抗干扰措施,如采用三相电源噪声滤波、三相电抗器外,还从控制柜整体结构上采取了相应的应对措施,把包括上位机PXI 设备、PXI-7358运动控制卡、UMI-7774端子板、PXI-6511数字输入卡等在内的核心控制器布置在弱电数控柜中。同时,把伺服放大器、接触器、空气开关、滤波器、电抗器等集中在强电柜中,体积较大的变压器则单独封装。
软件设计:
软件设计中需要解决的首要问题就是地震波形的生成。采用LabVIEW 的波形生成器,能够方便的生成各种频率成分、各种类型的波形。然后将这些波形文件作为地震模拟振动台的振动数据,利用并联机构的反解方程转换成八个电机的输入数据。
首先要确定丝杠安装的初始位置A (i )和第i 支链与滑鞍相连的球铰中心点B (i ),通过反解即可确定第i 支链与动平台相连的球铰中心点C (i )和B (i )点在固定坐标系下x 的坐标 dx (i )。
电机码盘每转1圈是2000个脉冲,四分频后即为8000个脉冲。丝杠为四头,螺矩为12.5mm ,可以求得丝杠导程是50mm ,所以1毫米对应160个脉冲。MA TLAB 脚本文件中插入上述分析结果,利用LabVIEW 强大的矩阵处理功能,使得方程的求解更直观,
图2 DZ10型地震模拟振动台样机
图3 地震模拟振动台控制系统框图
而且程序的后期维护更加方便。图4是
各电机驱动量求解程序的部分框图。
有了输入数据,还要解决八个输
入电机的空间向量分配问题。由于软
件提供的向量空间是3轴的,而并联
机构各个驱动电机的速度值、加速度
值在每一时刻、每一位姿时都是不同
的,因此多电机的变参数控制成为并
联机构控制系统设计的一个关键问
题。我们采用循环赋值的方法很好的
解决了这一技术难题。
图5为该DZ10型地震模拟振动
台控制系统的面板设计,其中包括八
个电机轴的分配、设置速度、加速度
参数、运动速度幅值和各电机驱动量图4 地震模拟振动台电机驱动量求解程序框图
显示等。Array结论:
基于美国NI公司的LabVIEW软
件、PXI设备、多轴运动控制卡等先
进的虚拟仪器技术,我们用极短的时
间成功开发了DZ10型地震模拟振动
台控制系统的设计,为国家杰出青年
基金项目(50125516)的顺利完成奠
定了基础。
LabVIEW易学易用的特点使得开
发人员大大减少了开发时间,更多的
专注于专业知识的应用,极大的提高
了工作效率。LabVIEW强大的PID控
制系统设计软件包则更为工业控制领
域的研发人员提供了一条捷径。同时,
如果系统从硬件到软件均采用NI的
产品,能够实现很好的集成性和兼容
性,为产品的质量提供保障。
图5 地震模拟振动台控制面板设计
地震模拟振动台及模型试验研究进展_沈德建
第22卷第6期2006年12月 结 构 工 程 师S t r u c t u r a l E n g i n e e r s V o l .22,N o .6 D e c .2006 地震模拟振动台及模型试验研究进展 沈德建 1,2 吕西林 1 (1.同济大学结构工程与防灾研究所,上海200092;2.河海大学土木工程学院,南京210098) 提 要 在介绍振动台本身发展的基础上,分析了振动台试验研究内容的扩展、振动台模型试验动态相似关系研究进展、振动台试验方法的发展和振动台试验新的测量方法,提出了振动台模型试验中值得关 注的一些问题。 关键词 振动台,模型试验,动态相似关系,试验方法 R e s e a r c hA d v a n c e s o nS i m u l a t i n g E a r t h q u a k e S h a k i n g T a b l e s a n dMo d e l T e s t S H E ND e j i a n 1,2 L UX i l i n 1 (1.R e s e a r c hI n s t i t u t e o f S t r u c t u r a l E n g i n e e r i n g a n d D i s a s t e r R e d u c t i o n ,T o n g j i U n i v e r s i t y ,S h a n g h a i 200092,C h i n a ; 2.I n s t i t u t e o f C i v i l E n g i n e e r i n g ,H o h a i U n i v e r s i t y ,N a n j i n g 210098,C h i n a ) A b s t r a c t T h e d e v e l o p m e n t o f s h a k i n gt a b l e i s i n d u c e df i r s t i nt h i s p a p e r .T h e e x p a n s i o n o f t h e r e s e a r c h s c o p e o f s h a k i n g t a b l e s i s a n a l y z e d .T h e d y n a m i c s i m i l i t u d e r e l a t i o n s h i p f r o md i f f e r e n t a u t h o r s i s c o m p a r e d a n d r e m a r k e d .T h e d e v e l o p m e n t o f t e s t i n g m e t h o d o n s h a k i n g t a b l e s a n d n e w m e t h o d o n a n a l y z i n g t h e r e s u l t i s a l s o p r e s e n t e d .S o m e v a l u a b l e q u e s t i o n s o n s h a k i n g t a b l e t e s t a r e i n d u c e d a n d m a y b e p a i d g r e a t a t t e n t i o nb y r e -s e a r c h e r s .K e y w o r d s s h a k i n g t a b l e ,m o d e l t e s t ,d y n a m i c s i m i l i t u d e r e l a t i o n s h i p ,t e s t i n g m e t h o d 基金项目:国家自然科学基金重点项目(50338040) 1 概 述 结构振动台模型试验是研究结构地震破坏机理和破坏模式、评价结构整体抗震能力和衡量减震、隔震效果的重要手段和方法。然而,由于振动台本身承载能力、试验时间和经费等的限制,许多时候必须做缩尺模型试验,在坝工模型和高层、超高层建筑中更是如此。 一些新型结构形式,由于其超出了设计规范的要求,往往需要通过实验对其抗震性能做合理的评估。超高层建筑和超大跨度建筑,在理论分析还不完善的情况下,试验,特别是振动台模型试验,是分析其抗震能力的一种有效手段。 线弹性的缩尺模型相似关系已得到了较好的解决,但是许多复杂结构的相似关系、非线性动态 相似关系虽然进行了一些研究,但是还未能得到 较好的解决。一些劲性钢筋混凝土结构、钢管混凝土结构和其他一些新型结构的动态相似关系的 研究还不够深入,有些甚至才刚刚起步。 振动台试验较好地体现了模型的抗震性能,可我们更关心的是由模型的试验结果推算的原型结构的抗震性能,但在这方面尚未形成非常一致的结论,还存在一定的误差,因而精度还有待于进一步的提高。本文介绍国内外振动台模型试验的研究进展。 2 研究的最新进展 2.1 振动台本身的发展 作为美国N E E S 计划的一部分,加州大学圣地亚哥分校(U C S D )于2004年安装M T S 公司制
运动控制的基础
运动控制的基础 概观本教程是在NI测量基础系列的一部分。每个在这个系列的教程,教你一个常用的测量应用的特定主题的解释理论概念,并提供实际的例子。在本教程中,学习运动控制系统的基础知识,包括软件,运动控制器,驱动器,电机,反馈装置,I / O。您还可以查看交互式演示,通过本教程的材料在自己的步伐。有关更多信息,返回到NI测量基础主页。目录运动控制系统的组成部分软件配置,原型设计,开发运动控制器移动类型电机放大器和驱动器汽车和机械要素反馈装置和运动的I / O NI相关产品运动控制系统的组成部分图1显示了一个运动控制系统的不同组件。图1。运动控制系统组件应用软件-您可以使用应用软件,以命令的目标位置和运动控制型材。运动控制器-运动控制系统的大脑作用到所需的目标位置和运动轨迹,并建立电机的轨迹遵循,但输出±10 V的伺服电机或步进和方向脉冲信号,步进电机。 放大器或放大器(也称为驱动器)驱动器-从控制器的命令和需要开车或关闭电机的电流产生。电机-电机机械能变成电能和生产所需的目标位置移动到所需的扭矩。机械部件-电机的设计提供一些力学的扭矩。这些措施包括线性滑轨,机械手臂,和特殊的驱动器。反馈装置或位置传
感器-位置反馈装置是不是需要一些运动控制应用(如步进电机控制),但重要的是为伺服电机。反馈装置,通常是一个正交编码器,感应电机的位置和结果报告控制器,从而结束循环的运动控制器。软件配置,原型设计,开发应用软件分为三大类:配置,原型和应用程序开发环境(ADE)。图2说明了运动控制系统的编程过程和相应的NI产品设计过程:图2。运动控制系统开发过程组态 做的第一件事情之一,是您的系统配置。为此,美国国家仪器公司提供测量与自动化浏览器(MAX),不仅运动控制,但所有其他NI硬件配置的交互式工具。对于运动控制,MAX 提供交互式的测试和调整面板,帮助您验证系统功能之前,你的程序。图3 NI MAX是一个交互式工具,用于配置和调整您的运动控制系统。 应用笔记 了解伺服调谐 使用1D互动的环境测试电机功能 轴运动控制器的配置 轴运动控制器设置 运动控制器的编码器设置 运动控制器的参考设置 数字运动控制器的I / O设置原型 当你配置你的系统,你可以开始原型和开发应用程序。在
PMAC多轴运动控制卡学习(硬件)
目录 PMAC控制卡学习(硬件) (2) 第一章PMAC简介 (2) 1.1 PMAC的含义和特点 (2) 1.2 PMAC的分类及区别 (2) 1.2.1 PMAC的分类 (2) 1.2.2 PMAC 1型卡与2型卡的主要区别 (2) 第二章Turbo PMAC Clipper控制器硬件配置 (3) 2.1 Turbo PMAC Clipper控制器简介 (3) 2.2 Turbo PMAC Clipper硬件配置 (3) 2.2.1 Turbo PMAC Clipper硬件标准配置为: (3) 2.2.2 Turbo PMAC Clipper控制器可选附件 (6) 2.2.2.1 轴接口板 (6) 2.2.2.2 反馈接口板 (6) 2.2.2.3 数字I/O接口板 (7) 第三章Turbo PMAC Clipper设备连接 (7) 3.1 板卡安装 (7) 3.2 控制卡供电 (7) 3.2.1 数字电源供电 (7) 3.2.2 DAC(数字/模拟转换)输出电路供电 (7) 3.2.3 标志位供电 (8) 3.3 限位及回零开关 (8) 3.3.1 限位类型 (8) 3.3.2 回零开关 (8) 3.4电机信号连接 (8) 3.4.1增量式编码器连接 (8) 3.4.2 DAC 输出信号 (9) 3.4.3 脉冲&方向(步进)驱动 (10) 3.4.4 放大器使能信号(AENAn/DIRn) (10) 3.4.5 放大器错误信号(FAULT-) (10) 3.4.6 可选模拟量输入 (11) 3.4.7 位置比较输出 (11) 3.4.8 串行接口(JRS232) (11) 3.5 设备连接示例 (11) 3.6 接口及指示灯定义 (13) 3.7 跳线定义 (15) 3.8 Turbo PMAC Clipper端口布置及控制结构图 (19) 附件 (21) 1.接口各针脚定义 (21) 2. 电路板尺寸及孔位置 (30)
地震模拟振动台九子台阵系统的安装与调试
Dynamical Systems and Control 动力系统与控制, 2016, 5(1), 11-17 Published Online January 2016 in Hans. https://www.360docs.net/doc/1b73108.html,/journal/dsc https://www.360docs.net/doc/1b73108.html,/10.12677/dsc.2016.51002 The Installation and Debugging of Nine Sub-Array System of Shaking Table Juke Wang, Chunhua Gao, Shuoyu Zhang Beijing Laboratory of Earthquake Engineering and Structural Retrofit, Beijing University of Technology, Beijing Received: Dec. 20th, 2015; accepted: Jan. 10th, 2016; published: Jan. 14th, 2016 Copyright ? 2016 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). https://www.360docs.net/doc/1b73108.html,/licenses/by/4.0/ Abstract Facing the damage caused by the frequent occurrence of earthquakes, this study pointed out that shaking table experiment is the research and development direction of structural seismic test, and briefly summarized the developmental history and status quo. In recent years, as array system of-fered important experiment methods to the anti-seismic experimental research and theoretical research of such slim-lined constructions as large-space structure, pipeline, multiple span bridge, etc., this study made a conclusion of the system composition, functional characteristics, installa-tion method and debugging procedures of nine sub-array system based on the nine sub-array sys-tem of BJUT, and further explained the characteristics and contents of array system control. It’s of some referential value for the technological development of shaking table array experiment. Keywords Shaking Table Array, Function Debugging, System Control 地震模拟振动台九子台阵系统的安装与调试 王巨科,高春华,张硕玉 北京工业大学,工程抗震与结构诊治北京市重点实验室,北京 收稿日期:2015年12月20日;录用日期:2016年1月10日;发布日期:2016年1月14日
运动控制卡概述
运动控制卡概述 ? ?主要特点 ?SMC6400B独立工作型高级4轴运动控制器 功能介绍: 高性能的独立工作型运动控制器以32位RISC为核心,控制4轴步进电机、伺服电机完成各种功能强大的单轴、多轴运动,可脱离PC机独立工作。 ●G代码编程 采用ISO国标标准G代码编程,易学易用。既可以在文本显示器、触摸屏上直接编写G代码,也可以在PC机上编程,然后通过USB通讯口或U盘下载至控制器。 ●示教编程 可以通过文本显示器、触摸屏进行轨迹示教,编写简单的轨迹控制程序,不需要学习任何编程语言。 ●USB通讯口和U盘接口 支持USB1.1全速通讯接口及U盘接口。可以通过USB接口从PC机下载用户程序、设置系统参数,也可用U盘拷贝程序。
●程序存储功能 程序存储器容量达32M,G代码程序最长可达5000行。 ●直线、圆弧插补及连续插补功能 具有任意2-4轴高速直线插补功能、任意2轴圆弧插补功能、连续插补功能。应用场合: 电子产品自动化加工、装配、测试 半导体、LCD自动加工、检测 激光切割、雕铣、打标设备 机器视觉及测量自动化 生物医学取样和处理设备 工业机器人 专用数控机床 特点: ■不需要PC机就可以独立工作 ■不需要学习VB、VC语言就可以编程 ■32位CPU, 60MHz, Rev1.0 ■脉冲输出速度最大达8MHz ■脉冲输出可选择: 脉冲/方向, 双脉冲 ■2-4轴直线插补 ■2轴圆弧插补 ■多轴连续插补 ■2种回零方式 ■梯型和S型速度曲线可编程
■多轴同步启动/停止 ■每轴提供限位、回零信号 ■每轴提供标准伺服电机控制信号 ■通用16位数字输入信号,有光电隔离 ■通用24位数字输出信号 ■提供文本显示器、触摸屏接口 技术规格: 运动控制参数 运动控制I/O 接口信号 通用数字 I/O 通用数字输入口 通用数字输出口 28路,光电隔离 28路,光电隔离,集电极开路输出 通讯接口协议
基于labview的智能家居控制设计
检测技术与仪表实验 课程设计 题 目 基于labview 的智能家居控制设计 姓 名 徐鑫涛 黄敏瑶 学 号 3100404112 3100404129 专业班级 10电气工程及自动化2班 任课教师 李园/钟伟红 分 院 信息科学与工程学院 完成日期 2012年12月20日 宁波理工学院
摘要 随着嵌入式技术的发展和高速宽带网络的普及, 利用网络实现远程监控已为人们广泛接受,嵌入式网络监控技术正是在此条件下逐步发展成熟起来的. 用户使用Web 浏览器,通过以太网远程访问内置Web 服务器的监控摄像机, 不但可以实现对现场的远程视频监控, 而且可以向监控现场发送指令. 在整个系统的实现过程中, 嵌入式Web 服务器起着十分重要的作用,实现智能化离不开运算和控制单元。 本文中,我们探讨实现室内外温度,湿度,光照强度的智能控制采用虚拟仪器技术,数据采集并测得电气物理量,如电压、电流、温度等,基于数据采集以及labview仿真,通过软硬件与计算机的结合,实现了测量的自动化并提供可分析数据,对于温度程序的核心思想,其实就是利用这个系统能够根据温度的变化做出相应的处理,比如说外部温度比设定的温度高那么我就需要让制冷设备发挥作用来降低温度,设置相关反馈环节,基于LabView的温度控制系统,主要讲述控制系统软件方面的设计,首先对温度传感器采集到的温度信号(转化并处理为电压信号)输入到采集卡模拟输入端口,采集卡将信号送入LabView程序处理后从模拟输出端输出相关有效的PWM调制波形,实现了测量的自动化并提供可分析数据,实现使室内的温度、湿度、光照度等保持一个基本平衡的状态的智能化系统。 Internet向普通家庭生活不断扩展,消费电子、计算机、通讯一体化趋势日趋明显,现代智能家居由于其安全、方便、高效、快捷、智能化等特点在21 世纪将成为现代社会和家庭的新时尚。当家庭智能网关将家庭中各种各样的家电通过家庭总线技术连接在一起时,就构成了功能强大、高度智能化的现代智能家居系统。而基于嵌入式系统的家庭智能系统在国内才刚刚出现,随着嵌入式技术更加广泛的应用,随着成本的逐步降低,中国的智能家居最终将走向嵌入式。 关键词:温度反馈嵌入式系统 labview 数据采集
高层建筑抗震性能模拟地震振动台试验
一、竞赛目的 通过比赛,加强华东地区工科院校土建类专业之间的相互交流,促进学生创新能力和专业技术水平的提高,营造培养卓越工程人才的良好氛围。 本次比赛突出设计理念、结构概念、结构体系创新,采用先进设备实施加载试验,希望能从理论创新引领实际工程发展的角度,加强理论与实际的有机结合,注重对设计构思与实施结果一致性的考察。 二、竞赛题目 高层建筑抗震性能模拟地震振动台试验 三、竞赛内容 1、结构方案概念设计及方案优选; 2、结构分析与制作详图设计; 3、结构模型制作; 4、结构模型模拟地震振动台试验。 四、竞赛细则 (一)材料及制作工具 1、材料 主体材料:有机玻璃板,额定厚度:1mm、2mm,弹性模量2.6?103MPa,强度40MPa,比重1.2。 辅助材料:镀锌铁丝,规格22号,直径0.71mm,材质:Q235。 胶接材料:氯仿、502胶(辅助安装质量块用,安装质量块时在实验室现场领取)。 标识材料:红、黄、蓝、黑彩色不干胶纸各一张,规格100?40。 【注1】材料由组委会提供,不允许使用任何其他材料。
【注2】材料参数仅供参考,有机玻璃板厚度、镀锌铁丝的直径可能 有较大的误差,以实测结果为准。 2、制作工具 钩刀、美工刀、电吹风、0#水砂纸、锉刀、直尺、图板、小毛笔、滴管注射器。 (二)模型设计要求 1、底座 虚线内为模型可使用范围,Φ1=8为柱脚安装孔,Φ2=5为底板安装孔 底座平面示意图 模型需可靠连接于底座上,然后固定于地震模拟振动台台面上。底座为有机玻璃板,尺寸250×250×6mm,外围25mm范围不得有任何构件。底座内部200 200范围8个直径8mm的圆孔,可用于固定构件(上部模型如不能利用这8个孔,可采用其它任一有效方式将上部模型固定于底板上);外围12个直径5mm的孔用于将底座固定于地震模拟振动台台面上。底座平面示意见上图,底座上不得另行钻孔。
XJ-Z50小型地震模拟振动台
XJ-Z50小型地震模拟振动台 南京工业大学土木工程学院实验教学中心研制
XJ-Z50小型地震模拟振动台 1、概述 振动实验台有液压式、机械式和电磁式等几种,振动台在结构抗震、自振频率测量、结构振动分析中是不可缺少的设备,振动台设备的成本与台面的尺寸、性能和相应的配套设备有关,一般要几十万到上百万以上的资金才能建成。那么对于众多理工科院校和新建院校承担如此高的资金有一定的难度。我们推出的“XJ-Z50小型地震模拟振动台”是为理工科院校专门设计的,该系统具备了振动台的所有实验内容,费用相应要低得多,适合作为教学使用,使学生能通过实验来学习、认识和掌握在振动上要完成的实验方法,为将来参与实际大、中振动台建设打下基础。 该系统除用于教学外,还可用于小型仪器(如:精密电子仪器、手持设备、计算机硬盘驱动器、传感器、MEMS 传感器和其它设备等)的振动考核试验。只要配备一只标准加速度计(如B&K 公司的加速度计),就可用该系统对其它传感器的灵敏度和频响曲线进行标定,传感器标定在工程试验中是必不可少的。 2、系统组成 该系统由振动台台面系统、电磁式激振器、功率放大器、振动台控制传感器、振动台控制仪(含数据采集、程控信号源)、计算机和控制软件组成。
3、实验内容 3.1 地震模拟、人工模拟地震波再现、地震反应谱测试;3.2 白噪声激励与结构振型测试; 3.3等幅值正弦扫频控制与结构振型测试; 3.5 随机波实验模拟; 3.6 加速度传感器和速度传感器灵敏度、频响曲线标定测试(选配); 4、技术指标和型号振动台控制机柜 4.1 振动台和功率放大器: 台面尺寸:516x360x20mm 台体材料:铝合金 台面自重:11kg 激振力:500N 频率范围:0-2000Hz 总重量:75kg 最大位移: 10mm 最大加速度:±5g
基于LabVIEW的控制系统仿真
基于LabVIEW的控制系统仿真 摘要 在控制理论教学和实验中,存在着设备短缺、教学手段单一等问题,采用虚拟控制系统实验方式可有效地解决这些问题。本文对控制系统仿真的意义与研究现状作了介绍,提出并确定了基于LabVIEW的控制系统仿真的实施方案。应用NI公司的LabVIEW 2009、控制设计工具包作为软件开发工具,实现了控制系统的建模、分析与设计这一系列过程的计算机仿真。经过编写程序和发布应用程序,最终开发出了一种交互式实验教学系统。该系统包含信号发生器、典型环节、质点-弹簧-阻尼器系统和一级倒立摆系统四个子模块,用户可进行控制系统建模、性能分析、PID设计、LQR设计等方面的研究。各个子模块运行良好,整个系统具有操作简单、界面友好和实时交互的特点;对于教学和实验的改革和创新具有一定的指导意义。 文中详细介绍了该实验教学系统的设计思路与设计过程。主体部分是对系统各个子模块的理论分析、相应的算法分析和虚拟仪器程序的编写,此外还涉及程序的动态调用和发布应用程序等内容。 关键词:控制系统;仿真;LabVIEW;倒立摆;实时交互
Simulation of Control System Based on LabVIEW Abstract In the teaching and experimental process of control theory, there exist problems such as equipment shortages, monotonous teaching methods and etc. We can use Virtual Instrument to solve these problems effectively. This paper introduces the significance and research status of the control system simulation, puts forward and determines the implement scheme of the Control System Simulation Based on LabVIEW. Use NI's products (LabVIEW 2009, Control Design Toolkit) as software development tools to realize computer simulation of the control system modeling, analysis and design process. After writing programs and publishing applications, we can achieve an interactive experimental and teaching system. The system consists of four sub-modules: signal generator, typical elements, the mass-spring-damper system and the single inverted pendulum system. Users can do research in control system modeling, performance analysis, PID design, LQR design and other aspects. Each sub-module of the system runs well, the whole system has the features as follows: simple, friendly interface and real-time interactive. It will provide the teaching and experiment field with reform and innovation. This paper describes the thinking and design process of the system in details. Theoretical analysis and algorithm analysis for the sub-module and Virtual Instrument programs writing are the main parts. It also discusses the dynamic program invocation and publishing applications and so on. Keywords:Control System; Simulation; LabVIEW; Inverted Pendulum; Real-Time Interaction
振动台试验终极版
一、前言 模拟地震振动台可以很好地再现地震过程和进行人工地震波的试验,它是在试验室中研究结构地震反应和破坏机理的最直接方法,这种设备还可用于研究结构动力特性、设备抗震性能以及检验结构抗震措施等内容。另外它在原子能反应堆、海洋结构工程、水工结构、桥梁工程等方面也都发挥了重要的作用,而且其应用的领域仍在不断地扩大。模拟地震振动台试验方法是目前抗震研究中的重要手段之一。 20世纪70年代以来,为进行结构的地震模拟试验,国内外先后建立起了一些大型的模拟地震振动台。模拟地震振动台与先进的测试仪器及数据采集分析系统配合,使结构动力试验的水平得到了很大的发展与提高,并极大地促进了结构抗震研究的发展。 二、常用振动台及特点 振动台可产生交变的位移,其频率与振幅均可在一定范围内调节。振动台是传递运动的激振设备。振动台一般包括振动台台体、监控系统和辅助设备等。常见的振动台分为三类,每类特点如下: 1、机械式振动台。所使用的频率范围为1~100Hz,最大振幅±20mm,最大推力100kN,价格比较便宜,振动波形为正弦,操作程序简单。 2、电磁式振动台。使用的频率范围较宽,从直流到近10000Hz,最大振幅±50mm,最大 推力200kN,几乎能对全部功能进行高精度控制,振动波形为正弦、三角、矩形、随机,只有极低的失真和噪声,尺寸相对较大。 3、电液式振动台。使用的频率范围为直流到近2000Hz,最大振幅±500mm,最大推力 6000kN,振动波形为正弦、三角、矩形、随机,可做大冲程试验,与输出力(功率)相比,尺寸相对较小。 4、电动式振动台。是目前使用最广泛的一种振动设备。它的频率范围宽,小型振动台频率 范围为0~10kHz,大型振动台频率范围为0~2kHz,动态范围宽,易于实现自动或手动控制;加速度波形良好,适合产生随机波;可得到很大的加速度。原理:是根据电磁感应原理设置的,当通电导体处的恒定磁场中将受到力的作用,半导体中通以交变电流时将产生振动。振动台的驱动线圈正式处在一个高磁感应强度的空隙中,当需要的振动信号从信号发生器或振动控制仪产生并经功率放大器放大后通到驱动线圈上,这时振动台就会产生需要的振动波形。组成部分:基本上由驱动线圈及运动部件、运动部件悬挂及导向装置、励磁及消磁单元、台体及支承装置。 三、组成及工作原理 地震模拟振动台的组成和工作原理 1.振动台台体结构 振动台台面是有一定尺寸的平板结构,其尺寸的规模由结构模型的最大尺寸来决定。台体自重和台身结构是与承载试件的重量及使用频率范围有关。一般振动台都采用钢结构,控制方便、经济而又能满足频率范围要求,模型重量和台身重量之比以不大于2为宜。振动台必须安装在质量很大的基础上,基础的重量一般为可动部分重量或激振力的10~20倍以上,这样可以改善系统的高频特性,并可以减小对周围建筑和其他设备的影响。 2.液压驱动和动力系统
基于AVR单片机和LabVIEW的丝杆步进电机运动控制系统
基于A VR单片机和LabVIEW的丝杆步进电机运动控制系统 A VR单片机为核心的嵌入式系统,配备专用步进电机驱动器实现对丝杆步进电机运动的控制工作,LabVIEW软件构建虚拟仪器系统并创建友好交互界面。单片机和LabVIEW之间确定串口通信规则,使LabVIEW能够发送相应字符串到单片机从而实现对丝杆步进电机启停、运动方向、运动步数的直接控制,并能够读取电机相关运动状态。文章设计的丝杆电机运动控制系统具有工作稳定,易于操作和可移植性强的特点。 标签:单片机;LabVIEW;步进电机;串口通信 1 概述 丝杆步进电机,又称线性步进电机,由于其特殊的机械机构和工作机理,在日常实验研究及工业生产等相关领域发挥着越来越大的作用。随着技术的不断发展创新,对于丝杆步进电机运动的控制方法已经不仅仅只限于单种技术的使用,而是多技术混合,结合各自的独特优势来实现最优化的系统设计。本系统以A VR 单片机为核心搭建硬件工作电路,LabVIEW软件创建虚拟仪器系统,解决了步进电机工作噪声较大,控制操作不便等问题。 2 系统组成 系统主要由装有LabVIEW软件的计算机,A VR单片机、电机驱动器和丝杆步进电机组成,系统组成框图如图1所示。 其中本系统中选用美国国家仪器(NI)公司研制开发的2014版LabVIEW 软件,LabVIEW是一种图形化的编程语言的开发环境,可以方便地建立自己的虚拟仪器,利用其编写的上位机程序控制下位机;下位机选用ATMEL公司中8位系列单片机的ATmega128系列单片机,该款单片机稳定性极高,功耗也很低,单片机与计算机之间通过USB线连接;电机驱动器选用TB6600型号的两相式步进电机驱动器,可实现正反转控制,通过3位拨码开关选择7档细分控制,3位拨码快关选择8档电流控制,能达到低振动、小噪声、高速度的效果;丝杆步进电机选用机身长度40mm,相电流1.7A,保持转矩43N·cm,导程8mm的42丝杆步进电机。 3 系统功能实现 本系统是一种丝杆步进电机运动控制系统,最终可通过LabVIEW直接发送控制丝杆步进电机启停、运动方向以及运动步数的命令,并能读取电机相关运动状态。要完成上述功能需要单片机硬件控制电机、单片机与LabVIEW串口通信和LabVIEW状态机三个基本功能的实现。 3.1 单片机硬件控制电机
基于LabVIEW的几种简单测量与控制系统.
基于LabVIEW的几种简单测量与控制系统 李鹏雄徐熙炜 指导老师:俞熹 (复旦大学物理系上海 200433) 摘要:本文介绍了虚拟仪器的概念,LabVIEW的概念、来源、特点以及应用,着重讨论了几种简化的实用测量与控制系统。对红绿灯系统提出改进,使其更接近于生活中的实际情况。最后有对本实验的理解。 关键词:虚拟仪器 LabVIEW 计算机实测与控制温度计光强红绿灯 一.引言 虚拟仪器(Virtual Instruments)指的是用计算机软件将计算机硬件与仪器硬件结合在一起,利用计算机强大的计算以及模拟能力和仪器设备实现控制和测量的目的的工具。区别于传统的仪器,虚拟仪器没有一套固定的设备、固定的外观和功能等,其很大一部分功能是依赖于计算机来实现的。所以虚拟仪器往往能缩小体积,减少硬件成本。 LabVIEW是实验室虚拟仪器集成环境(Laboratory Virtual Instrument Engineering Workbench)的简称,是美国国家仪器公司(NATIONAL INSTRUMENTS,简称NI)的创新软件产品。其功能是用编程的方法创建虚拟仪器,但是和传统的编程不同的是,它使用的是图形化的程序语言,称为“G”语言,编写的程序后缀为.VI。使用这种语言编程时,基本上不写程序代码,取而代之的是图标和流程图。它尽可能利用了技术人员、科学家、工程师所熟悉的术语、图标和概念,因此,LabVIEW是一个面向最终用户的工具。LabVIEW集成了与满足GPIB、VXI、RS-232 和RS-485协议的硬件及数据采集卡通讯的全部功能。它还内置了便于应用TCP/IP、ActiveX等软件标准的库函数。这是一个功能强大且灵活的软件。使用它进行原理研究、设计、测试并实现仪器系统时,可以大大提高工作效率。它广泛地被工业界、学术界和研究实验室所接受,视为一个标准的数据采集和仪器控制软件。它也是目前应用最广、发展最快、功能最强的图形化软件集成开发环境。 二.LabVIEW下的几种简单测量与控制系统 使用LabVIEW开发平台编制的程序称为虚拟仪器程序,简称为VI。VI包括三个部分:程序前面板、框图程序和图标/连接器。程序前面板用于设置输入数值和观察输出量,用于模拟真实仪表的前面板。而每一个程序前面板都对应着一段框图程序。框图程序用LabVIEW图形编程语言编写,可以把它理解成传统程序的源代码。图标/连接器是子VI被其它VI调用的接口。 1.温度计 温度计程序是一个典型的测量用虚拟仪器。 图1就是温度计程序的前面板,可以看到上面有酒精温度计的图案,数字显示,还有两个显示电压和温度的框,以及一个停止按钮。
基于labview的电梯控制设计
成绩评定表
课程设计任务书
目录 1 目的及基本要求 (1) 2 基本原理 (1) 2.1程序原理 (1) 2.2设计步骤 (1) 3 电梯控制设计和仿真 (2) 3.1 总体程序设计 (2) 3.2 控件描述 (3) 3.3 子程序设计 (4) 4 结果及性能分析 (6) 4.1 运行结果 (6) 4.2 性能分析 (7) 参考文献 (7)
1 目的及基本要求 熟悉LabVIEW开发环境,掌握基于LabVIEW的虚拟仪器原理、设计方法和实现技巧,运用专业课程中的基本理论和实践知识,采用LabVIEW开发工具,实现国际象棋设计和仿真。 基本要求: 本程序是参照日常电梯使用规则而设计的,实现的功能是:程序运行后,可以选择要去的层数一层或者多层,电梯会从低到高的依次在已选择的层数停下来,然后在继续到下一个被选中的层数停下,当都已选楼层停下后,按钮会灭掉,回到一层,等待下一次的楼层选择。本程序基于电梯的特点利用LabVIEW制作的一款简单的电梯控制程序。 2 基本原理 2.1程序原理 设计上可大致分为以下几个部分: 1)主面板部分即电梯主界面的设置 2)控件部分即按钮的设置 3)控制部分就是通过操作按键来控制电梯移动 4)逻辑部分进行判断电梯走动没有,是否运行,同时布尔灯的亮灭 5)显示部分就是将电梯所到层数显示出来 运行原理: 程序运行后,首先规定电梯停在大楼的一层,然后根据右边所点亮的布尔控件上显示的数字层数,电梯经过时间的判断开始运行,向上或者向下移动,到达所选的楼层后,电梯停止,布尔灯灭掉,继续向下一个所选的楼层移动,直到所有的所选楼层全部停完后,
PMAC多轴运动控制卡学习(硬件)
目录
PMAC控制卡学习(硬件) 第一章PMAC简介 PMAC的含义和特点 1.PMAC的含义: PMAC是program multiple axis controller 可编程的多轴运动控制卡。 的特点: PMAC卡是美国Delta Tau公司九十年代推出的多功能运动控制器,能够提供运动轴控制,PLC控制和数据采集等多种功能。 PMAC的分类及区别 PMAC的分类 1. PMAC卡按控制电机的来分:有1型卡和2型卡。1型卡控制信号为±10V 模拟量,主要用速度方式控制伺服电。2型卡输出PWM数字量信号,可直接变为PULSE+DIR信号,来控制步进电机和位置控制方式的伺服电机。 2. PMAC卡按控制轴数来分:有2轴卡(MINI PMAC PCI),4轴卡(PMAC PCI Lite,PMAC2 PCI Lite,PMAC2A-PC/104及Clipper),8轴卡:(PMAC-PCI,PMAC2-PCI,PMAC2A-PC/104及Clipper),32轴卡:(TURBO PMAC和TURBO PMAC2)。 3. PMAC卡按通讯总线形式分:有ISA总线,PCI总线,PCI04总线,网口和VME总线。PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。PMAC除上述形式外,还可以提供集成的系统级产品.有:UMAC,IMAC400,IMAC800 ,IMAC flexADVANTAGE400 ,ADVANTAGE900等。 PMAC 1型卡与2型卡的主要区别 PMAC 1 PMAC2 CPU时钟(缺省)20MHZ 40MHZ
控制信号形式DAC模拟量PWM数字量 双端口RAM选项只有8轴卡不在板在板 在板I/O点数16IN 16OUT 32IN/OUT +8IN 8 OUT 常用接线板ACC8D ACCP ACC8F ACC8S ACC8E 第二章Turbo PMAC Clipper控制器硬件配置Turbo PMAC Clipper控制器简介 Turbo PMAC Clipper控制器(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,用于对成本极端敏感的应用的多轴运动控制器。这种功能强大的,但是又同时具备结构紧凑和超高性价比优点的多轴运动控制器,标准版本即带有Ethernet 以太网和 RS232 通讯接口以及内置 I/O。 Clipper 控制器不仅采用了一颗完整的Turbo PMAC2-CPU 而且提供了一个四轴伺服或步进控制加32个数字I/O 点的最小配置,控制轴数和I/O还可以扩展。 Turbo PMAC Clipper硬件配置 Turbo PMAC Clipper硬件标准配置为: ●电路板尺寸是110mm×220mm; ●80 MHz DSP56303 Turbo PMAC CPU(CPU时钟频率为80MHZ); ●256k x 24用户SRAM(即静态随机存储器,是一种具有静止存取功能的,不需 要刷新电路即能保存它内部存储的数据。存储容量为256K,地址线有24条。); ●1M x 8 flash mermory用于备份及固件存储;(闪存是一种非易失性,即断 电数据也不会丢失。内存为1M,8条I/O接口。); ●RS-232串行接口;(上的之一,通常 RS-232 接口以9个(DB-9)的型态出现, 一般个人上会有两组 RS-232 接口,分别称为 COM1 和 COM2。); ●100 Mbps以太网接口;(传输速率100Mbps=100/8=s) ●480 Mbps USB 接口;
基于LabVIEW软件的PID自动控制
苏州大学机电工程学院 Soochow University of Mechanical and Electrical Engineering 课程设计报告 Curriculum design 课题名称:基于LabVIEW软件的PID自动控制学院: ********院 专业:********* 姓名:*** 学号:****
目录 一、PID控制原理 (1) 1、PID控制介绍 (1) 2、PID控制规律 (1) 3、PID 控制的性能指标 (3) 4、PID 控制器参数整定的分类 (3) 5、PID相关控制 (5) 6、数字PID (7) 二、LabVIEW8.5软件 (9) 1、简介 (9) 2、特点 (10) 3、虚拟仪器 (11) 4、应用领域 (12) 三、前期练习题目与内容 (14) 四、设计内容与要求 (17) 1、设计内容 (17) 2、设计要求 (17) 五、设计方案 (18) 1、设计思路 (18) 2、程序框图设计 (20) 3、控制面板设计 (21) 六、最终设计结果及运行情况 (22) 1、程序框图 (22) 2、控制面板 (22)
七、课程设计心得 (25)
基于LabVIEW软件的PID自动控制 一、PID控制原理 1、PID 控制介绍 PID 控制是过程控制中广泛应用的一种控制,简单的说就是按偏差的比例(proportional)、积分(Integral)、微分(Derivative)进行的控制。当今,尽管各种高级控制在不断的完善,但目前在实际生产过程中应用最多的仍是常规PID 控制,其原因是: 1) 各种高级控制在应用上还不完善; 2) 大多数控制对象使用常规PID 控制即可以满足实际的需要; 3) 高级控制难以被企业技术人员掌握。 PID 控制器具有结构简单,参数易于调整等优点。在长期的工程实践中,人们对PID控制己经积累了丰富的经验。特别是在那些实际过程控制中,控制对象的精确数学模型难以建立,系统参数又经常发生变化,常采用PID 控制器,并根据经验进行在线整定。 以下将从PID 控制规律、PID 控制的性能指标及PID 控制参数整定三个方面对PID 控制做进一步的介绍。 2、PID 控制规律 PID(Proportional,Integral and Differential)控制器是一种基于“过去”,“现在”和“未来”信息估计的简单算法。
振动台模型试验
01 建筑结构的整体模型模拟地震振动台试验研究,从模型的设计制作、确定试验方案、进行试验前的准备工作、到最后实施试验和对试验报告数据进行处理,整个过程历时较长、环节较多。显然,预先了解和把握振动台试验的总体过程,做到有目的、有计划、有方法,才能较顺利地完成该项工作。介绍将会按照以下顺序依此进行: 1 模型制作 2 试验方案 3 试验前的准备 4 实施试验 5 试验报告 6 试验备份 02 1 模型制作 振动台试验模型的制作,在获得足够的原型结构资料后,至少需要把握这样几个关键环节: (1)依据试验目的,选用试验材料; (2)熟读图纸,确定相似关系; (3)进行模型刚性底座的设计; (4)根据模型选用材料性能,计算模型相应的构件配筋; (5)绘制模型施工图; (6)进行模型的施工。 对上述各条的设计原则以及注意事项等,分述如下。 1.1 选用模型材料 模型试验首先应明确试验目的,然后根据原型结构特点选择模型的类型以及使用材料。比如,试验是为了验证新型结构设计方法和参数的正确性时,研究范围只局限在结构的弹性阶段,则可采用弹性模型。弹性模型的制作材料不必与原型结构材料完全相似,只需在满足结构刚度分布和质量分布相似的基础上,保证模型材料在试验过程中具有完全的弹性性质,有时用有机玻璃制作的高层或超高层模型就属于这一类。另一方面,如果试验的目的是探讨原型结构在不同水准地震作用下结构的抗震性能时,通常要采用强度模型。强度模型的准确与否取决于模型与原型材料在整个弹塑性性能方面的相似程度,微粒混凝土整体结构模型通常属于这一类。以上分析也显现了模型相似设计的重要性。 在强度模型中,对钢筋混凝土部分的模拟多由微粒混凝土、镀锌铁丝和镀锌丝网制成,其物理特性主要由微粒混凝土来决定,有时也采用细石混凝土直接模拟原型混凝土材料,水泥砂浆模型主要是用来模拟钢筋混凝土板壳等薄壁结构,石膏砂浆制作的模型,它的主要优点是固化快,但力学性能受湿度影响较大;模拟钢结构的材料可采用铜材、白铁皮,有时也直接利用钢材。总之,模型材料的选用要综合就近取材及经费等因素,同时要注意强度、弹性模量的换算等。 1.2 模型相似设计 把握大型模型振动台试验,最关键的是正确的确定模型结构与原型结构之间的相似关系。目前常用的相似关系确定方法有方程分析法和量纲分析法两种,它们之间的区别是显而易见的:当待求问题的函数方程式为已知时,各相似常数之间满足的相似条件可由方程式分析得出;量纲分析法的原理是著名的相似定理:相似物理现象的π数相等;个物理参数、个基本量纲可确定()个nkkn[$#8722]π数。当待考察问题的规律尚未完全掌握、没有明确的函数关系式时,多用到这种方法。高层建筑结构模拟地震振动台试验研究中包含诸多的物理量,各物理量之间无法写出明确的函数关系,故多采用量纲分析法。 量纲分析法从理论上来说,先要确定相似条件(π数),然后由可控相似常数,推导其余的相似常数,完成相似设计。在实际设计中,由于π数的取法有着一定的任意性,而且当参与物理过程的物理量较多时,可组成的数也很多,将线性方程组全部计算出来比较麻烦;另一方面,若要全部满足与这些π数相应的相