01ABB中级工业机器人应用编程1+X实操题库3考核准备单

工业机器人应用编程职业技能等级(ABB 中级)
考核任务书准备单
一、场地要求
1.场地名称: 工业机器人应用编程考核中心
2.场地要求:
(1) 考场每个工位至少保证6m 2的面积,每个工位有固定台面,右上角贴
有工位号,考场采光良好,不足部分采用照明补充;
(2) 考场应干净整洁,无环境干扰,空气新鲜,有防火措施。考前由考务
人员检查考场各考位应准备的材料、设备、工具是否齐全,所贴工位号是否有遗漏。
(3) 各考核平台均提供单相交流 220V 电源供电设备及 0.5Mpa 以上压缩
空气气源,各考核平台电源有独立的短路保护、触电保护。
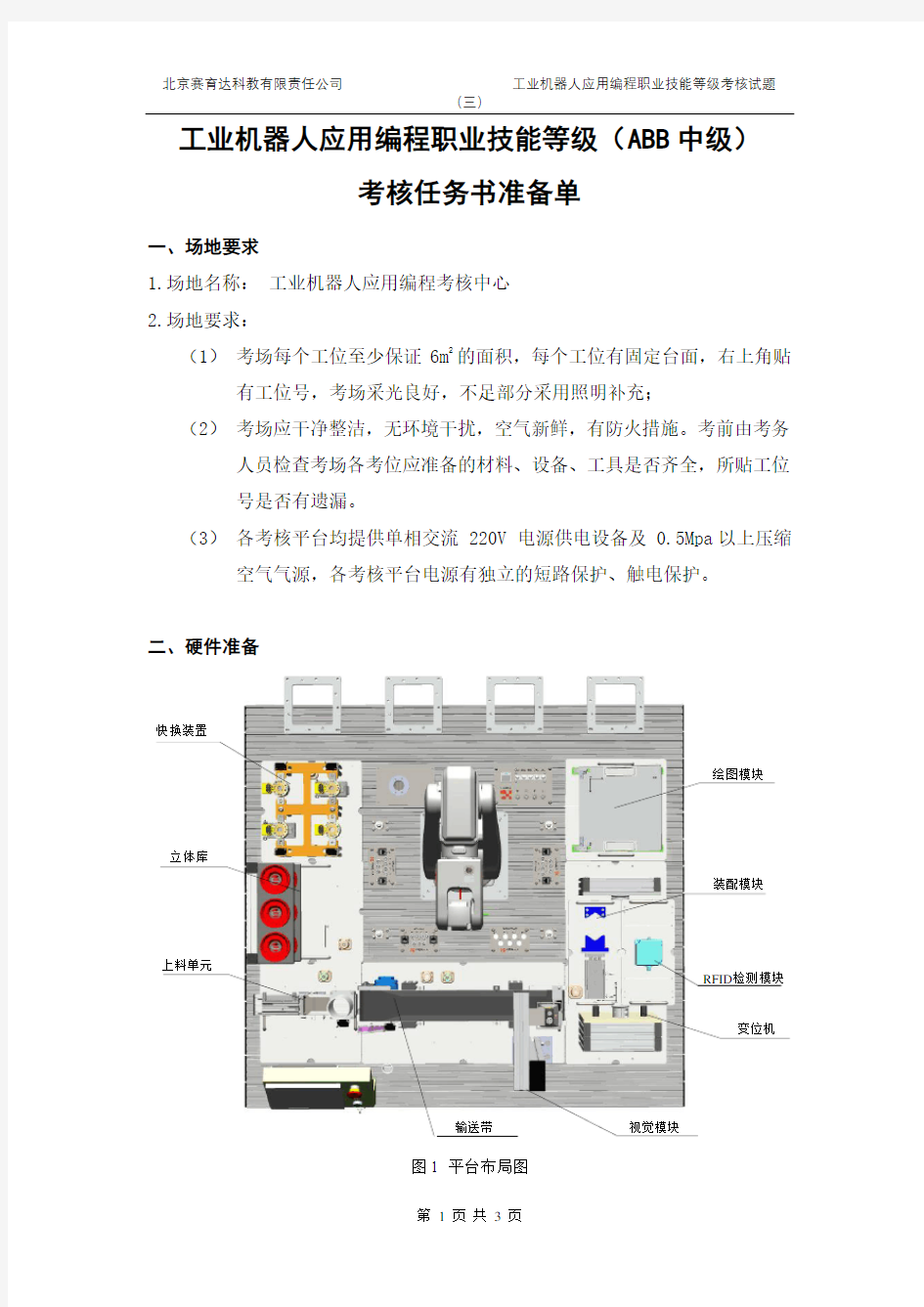
二、硬件准备
绘图模块
快换装置
立体库
RFID 检测模块
输送带上料单元
装配模块
变位机
视觉模块
图1 平台布局图
考核前,技术人员应查看“技术人员资料(考核设备恢复用)”文件夹文档,对照图1布局图,安装好模块,链接好模块电缆。
表1 每个考核设备清单
三、软件准备
1.软件清单
平台配套电脑需要安装如下软件:
(1)TIA Portal V15
(2)RobotStudio 6.08
(3)In-Sight Explorer 5.7.4
(4)sscom串口调试助手
2.考核环境准备
(1)机器人考核环境准备
打开工业机器人系统,加载“机器人环境准备”文件中的“ComPLC”程序。
(2)PLC考核环境准备
考前准备时PLC平台程序需要提前下载,即利用TIA Portal V15软件打开“ PLC环境准备1+X Lv2 ABB”工程并下载到PLC。
(3)离线编程环境准备
将离线编程环境和离线编程模型存放到“D:\1+X考核\离线编程”文件夹中。
四、参考资料准备
平台配套电脑需要提前准备如下参考资料,并提前放置在“D:\1+X考核\参考资料”文件夹下:
(1)配套工业机器人操作编程手册
(2)PLC编程手册
(3)1+XABB中级3 IO变量表
(4)ABB中级PLC函数库说明
(5)1+XABB数据接口器说明
五、安全防护用品准备
现场操作机器人需穿戴如下安全防护用品:
1.工作服(被考人员自带)
2.安全帽(考场提供)
3.电工鞋(被考人员自带)
六、工量具准备
被考人员需要自带相关工量具,建议但又不局限于自带如下工量具。
表2 建议工量具清单
《工业机器人操作与编程》课程标准
《工业机器人操作与编程》课程标准 1.课程性质和任务 《工业机器人操作与编程》是工业机器人技术专业必修的职业核心课程,工业机器人自动化生产线成套设备已经成为自动化装备的主流和未来发展方向,工业机器人的操作是一门实用的技术性专业课程,也是一门实践性较强的综合性课程,在工业机器人专业课程体系中占有重要地位,令学生能全面把握工业机器人应用的安装、配置与调试方法。本课程主要通过分析工业机器人的工作原理,通过涂胶、搬运、喷漆等常用工艺的实践,使学生了解各种工业机器人的应用,熟练掌握工业机器人的操作方法,锻炼学生的团队协作能力和创新意识,提高学生分析问题和解决实际问题的能力,提高学生的综合素质,增强适应职业变化的能力。 2.学习领域描述 国际先进国家在汽车、电子电器、工程机械等行业大量采用了工业机器人自动化生产线,以保证产品质量,提高生产效率,这就需要大量的具备工业机器人基本操作、在线示教、离线编程技能的,对机器人搬运、涂胶、喷漆、码垛等工艺具有足够的了解,能够控制机器人完成上述任务的操作技能型人才 3.先修课程和后续课程 先修课程:《工业机器人技术基础》、《机械制图与CAD》、《机械设计》 后续课程:《工业机器人拆装与维护》、《工业机器人离线编程》、《工业机器人操作与编程》 4.课程目标 掌握工业机器人的编程和操作方法,了解工业机器人常用工艺,通过这门课的学习,使学生对机器人有一个全面、深入的认识,培养学生综合运用所学基础理论和专业知识进行创新设计的能力,并相应的掌握一些实用工业机器人控制及规划和编程方法。 学习完本课程后,学生应当能具备从事工业机器人企业生产第一线的生产与管理等相关工作的基础知识和能力储备,包括: (1)掌握用示教器操作工业机器人运动的方法 (2)能新建、编辑和加载工业机器人程序 (3)能够编写工业机器人搬运动作的运动程序 (4)能够编写工业机器人涂胶运动的运动程序 (5)能够编写工业机器人喷涂运动的运动程序 (6)能够编写工业机器人上下料运动程序 (7)能够编写工业机器人码垛运动程序
工业机器人原理及应用实例
工业机器人原理及应用实例 一、工业机器人概念 工业机器人是一种可以搬运物料、零件、工具或完成多种操作功能的专用 机械装置;由计算机控制,是无人参与 的自主自动化控制系统;他是可编程、 具有柔性的自动化系统,可以允许进行 人机联系。可以通俗的理解为“机器人 是技术系统的一种类别,它能以其动作 复现人的动作和职能;它与传统的自动 机的区别在于有更大的万能性和多目 的用途,可以反复调整以执行不同的功 能。” 二、组成结构 工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座 和执行机构,包括臂部、腕部和手部, 有的机器人还有行走机构。大多数工业 机器人有3~6个运动自由度,其中腕 部通常有1~3个运动自由度;驱动系 统包括动力装置和传动机构,用以使执 行机构产生相应的动作;控制系统是按 照输入的程序对驱动系统和执行机构 发出指令信号,并进行控制。 三、分类 工业机器人按臂部的运动形式分为四种。直角坐标型的臂部可沿三个直 角坐标移动;圆柱坐标型的臂部可作升 降、回转和伸缩动作;球坐标型的臂部 能回转、俯仰和伸缩;关节型的臂部有 多个转动关节。 工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。 点位型只控制执行 机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、 装卸等作业;连续轨迹型可控制执行机 构按给定轨迹运动,适用于连续焊接和 涂装等作业。 工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程 输入型是将计算机上已编好的作业程 序文件,通过RS232串口或者以太网等 通信方式传送到机器人控制柜。 示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵 盒),将指令信号传给驱动系统,使执 行机构按要求的动作顺序和运动轨迹 操演一遍;另一种是由操作者直接领动 执行机构,按要求的动作顺序和运动轨 迹操演一遍。在示教过程的同时,工作 程序的信息即自动存入程序存储器中 在机器人自动工作时,控制系统从程序 存储器中检出相应信息,将指令信号传 给驱动机构,使执行机构再现示教的各 种动作。示教输入程序的工业机器人称 为示教再现型工业机器人。 具有触觉、力觉或简单的视觉的工业机器人,能在较为复杂的环境下工作; 如具有识别功能或更进一步增加自适 应、自学习功能,即成为智能型工业机 器人。它能按照人给的“宏指令”自选 或自编程序去适应环境,并自动完成更 为复杂的工作。 四、主要特点 工业机器人最显著的特点有以下几个: (1)可编程。生产自动化的进一步发 展是柔性启动化。工业机器人可随其工 作环境变化的需要而再编程,因此它在 小批量多品种具有均衡高效率的柔性 制造过程中能发挥很好的功用,是柔性 制造系统中的一个重要组成部分。 (2)拟人化。工业机器人在机械结构 上有类似人的行走、腰转、大臂、小臂、 手腕、手爪等部分,在控制上有电脑。 此外,智能化工业机器人还有许多类似 人类的“生物传感器”,如皮肤型接触 传感器、力传感器、负载传感器、视觉 传感器、声觉传感器、语言功能等。传 感器提高了工业机器人对周围环境的 自适应能力。 (3)通用性。除了专门设计的专用的 工业机器人外,一般工业机器人在执行 不同的作业任务时具有较好的通用性。
工业机器人操作编程职业技能等级标准
工业机器人操作编程职业技能等级标准
目录 前言 (3) 1范围 (4) 2规范性引用文件 (4) 3术语和定义 (4) 4面向工作岗位(群) (5) 5面向院校专业领域 (5) 6职业技能等级标准 (6) 参考文献 (8)
前言 本标准按照GB/T 1.1-2009给出的规则起草。 本标准起草单位:由北京赛育达科教有限责任公司主持,联合机械工业教育发展中心、机械行业工业机器人与智能装备职业教育集团、苏州大学、常州机电职业技术学院、江苏汇博机器人技术股份有限公司、奇瑞新能源汽车技术有限公司、埃夫特智能装备股份有限公司、上海ABB工程有限公司等单位共同制订。 本标准主要起草人:孙立宁王志强蒋庆斌禹鑫燚陈小艳叶晖肖永强等声明:本标准的知识产权归属于北京赛育达科教有限责任公司,未经北京赛育达科教有限责任公司同意,不得印刷、销售。
1范围 本标准规定了工业机器人操作编程职业技能的等级,阐明了相关企业岗位工作规范及其职业技能要求。 本标准适用于工业机器人操作编程职业技能等级培训与考核,工业机器人技术应用领域相关岗位从业人员的培训和职业院校教师专业培训。 2规范性引用文件 下列文件对于本文件的使用是必不可少的,凡是注日期的版本适用于本文件;凡是未注日期的引用文件,其最新版本适用于本文件。 《工业机器人安全实施规范》GB/T20867-2007 《工业机器人坐标系和运动命名原则》GB 16977-1997 《工业机器人性能试验实施规范》GB 20868-2007-T 国家、行业、企业有关标准 3术语和定义 国家、行业标准界定的以及下列术语的定义适用于本文件。 3.1机器人本体(Manipulater) 也称操作机,其结构通常是由一系列固定的及相互铰接或相对滑动的构件所组成。它通常有几个自由度,用以抓取或移动物体(工具或工件)。 3.2末端操作器(End Effector) 为使机器人完成其任务而专门设计并安装于机器人腕部末端,直接执行工作要求的装置。如焊枪、焊钳、切割枪、夹持器等。 3.3工作空间(Working Space) 工业机器人执行任务时,其手腕参考点所能掠过的空间。 3.4 轴数(Controlled Axes)
工业机器人操作与编程(ABB)教学大纲
工业机器人操作与编程(ABB)教学大纲 一、说明 1.课程的性质和内容 《工业机器人操作与编程(ABB)》课程是技师学院工业机器人应用与维护专业的专业课。主要内容包括:ABB机器人基础知识及手动操作、ABB机器人的IO 配置、ABB机器人程序数据、ABB机器人程序的编写、ABB机器人的总线通信、ABB机器人TCP练习、ABB机器人搬运垛、ABB机器人智能分拣。 2.课程的任务和要求 本课程的主要任务是培养学生熟练操作ABB机器人,能够独立完成机器人的基本操作,能够根据工作任务对ABB机器人进行程序编写,为学生从事专业工作打下必要的专业基础。 (1)通过本课程的学习,学生应该达到以下几个方面的专业基础。 (2)熟悉ABB机器人安全注意事项,掌握示教器的各项操作。 (3)掌握ABB机器人的基本操作,理解系统参数配置;学会手动操纵。 (4)掌握ABB机器人的I/O标准板的配置,学会定义输入、输出信号,了解Profibus适配器的连接。 (5)掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定。 (6)掌握RAPID程序及指令,并能对ABB机器人进行编程和调试。 (7)熟悉ABB机器人的硬件连接。 3.教学中应该注意的问题 (1)本课程的教学以ABB机器人的应用。维护为主,注意培养学生对机器人编程和维护的能力。 (2)在本课程的教学中应该注意培养学生的逻辑思维能力。 (3)编程教学时,应让学生重点掌握机器人的数据类型和指令功能。
二、学时分配表 三、课程内容及要求 项目一 ABB机器人基础知识及手动操作 教学要求 1.了解工业机器人的发展及机器人安全注意事项。 2.掌握ABB机器人示教器的使用 3.掌握示教器上基本的功能操作。 教学内容 任务一工业机器人的概述和安全注意事项 任务二认识示教器——配置必要的操作环境 任务三ABB机器人事件信息查询及数据备份与恢复 任务四ABB机器人的手动操纵 任务五ABB机器人的转数计数器更新操作 教学建议
全国青少年机器人等级考试一二级理论复习及试题汇编
全国青少年机器人技术等级考试 一、二级理论及实操 “Robot”的由来 1920年,原捷克斯洛伐克剧作家卡尔·恰佩克在他的科幻情节剧《罗萨姆的万能机器人》中,第一次提出了“机器人”(Robot)这个名词。在捷克语中,Robot这个词是指一个服役的奴隶。Robota(捷克文,原意为“劳役、苦工”) Robotnik(波兰文,原意为“工人” 二、机器人发展史 人们对机器人的幻想与追求已有3000多年的历史。“机器人”最早是以自动机械装置或自动人偶的形式出现,西方国家将早期的机器人称之为automation(自动机)或是self-operating machine(自行控制机器)。 1)古代机器人 指南车。人类记载的最早的机械装置。《古今注》记载黄帝与蚩尤涿鹿之战所用。 春秋时期,“公输子削竹木以为鹊,成而飞之,三日不下。”记载于《墨子.鲁问》中,是世界上最早的关于空中机器人的记载。 记里鼓车。汉代,大科学家张衡不仅发明了地动仪,而且发明了计里鼓车。计里鼓车每行一里,车上木人击木马车鼓一下,每行十里击钟一下。 春秋时期,“公输子削竹木以为鹊,成而飞之,三日不下。”记载于《墨子.鲁问》中,是世界上最早的关于空中机器人的记载。 记里鼓车。汉代,大科学家张衡不仅发明了地动仪,而且发明了计里鼓车。计里鼓车每行一里,车上木人击木马车鼓一下,每行十里击钟一下。 木构水运仪象台。北宋时期,苏颂等人制造了当时世界上最先进的天文钟。它由水力驱动,能以多种形式表现天体运行。它能集观测天象的浑仪、演示天象的浑象、计量时间的漏刻和报告时刻,是一座小型的天文台 根据史料记载,三国时期诸葛亮发明了一种用来运送军用物资的机器人,名为() A.记里鼓车 B.指南车 C.木牛流马 D.千里船 答案:C 题型:单选题 ?漏壶。公元前1400年由古巴比伦人发明,用水流来计量时间的计时器。也是历史上可考据的最早的机械装置之一。公园前270年左右,古希腊发明家特西比乌斯改进了漏壶——采用人物造型指针指示时间。 ?公元前2世纪,亚历山大时代的古希腊人发明了最原始的机器人──自动机。它是以水、空气和蒸汽压力为动力的会动的雕像,它可以自己开门,还可以借助蒸汽唱歌。 ?公元前14-17世纪,意大利文艺复兴,达芬奇作为发明家发明了机器人、机械车、子母弹、坦克车、潜水艇、直升机等超越时代的装置。其中达芬奇设计的机器人以木头金属皮革为外壳,以齿轮为驱动装置,可坐可站,头部能转动,胳膊能挥舞。 ?1662年,日本人竹田近江发明自动机器玩偶。 ?1737年,法国雅克沃康松发明机器鸭子。
最新2-机器人等级考试实操题—跷跷板
最新2-机器人等级考试实操题—跷跷板 全国青少年机器人技术等级考试(一级) 实际操作考试试卷 考生姓名: 证件编号: □□□□□□□□□□□□□□□□□□ 一、 模型样例 跷跷板 二、 作品简答(30分) 1、请在下面写出模型名称以及用途?(5分) 2、请写出该模型中蕴含的知识点?(25分) (1)杠杆的五要素。(5分) (2)杠杆的平衡条件。(5分) (3)简述杠杆使用什么原理分类,并列举生活中的实例(15分) 参考答案: 简答題 1、 请在下面写出模型名称以及用途(5分) 答:跷跷板、主要应用于户外健身,以及儿童娱乐; 2、 请写出该模型中蕴含的知识点(请同学分条作答,25分) (1)杠杆的五要素(5分) 答:动力臂、阻力臂、支点、动力、阻力 (2)杠杆平衡的条件(5分) 答:动力×动力臂=阻力×阻力臂; (3)简述杠杆是用什么原理分类,并列举生活中的实例(15分) 答:杠杆分为 等臂杠杆、费力杠杆、省力杠杆(3分)) 考试服务中心: 考试时间:
等臂杠杆:动力臂和阻力臂长度相同;如天平,跷跷板(4分) 费力杠杆:阻力臂长度总是大于动力臂;如镊子、鱼杆、扫帚等(4分); 省力杠杆:动力臂长度总是大于阻力臂;如门、订书机、板手等(4分) 三、作品展示(70) 请在规定时间内,完成作品搭建调试,并将身份证件及作品置于以下虚线框中,由考评员现场拍摄照片。
最新ABB机器人的程序数据 ABB[a]-J-5ABB 机器人的程序数据 5.1 任务目标 掌握程序数据的建立方法。 掌握三个关键程序数据的设定。 了解机器人工具自动识别功能。 5.2 任务描述 ◆以b ool 为例,建立程序数据,练习建立n um、robtarget 程序数据。 ◆设定机器人的工具数据t ooldata、工件坐标w objdata、负荷数据l oaddata。 ◆使用L oadIdentify 工具自动识别安装在六轴法兰盘上的工具(tooldata)和载荷(loaddata) 的重量,以及重心。 5.3 知识储备 5.3.1 程序数据 程序数据是在程序模块或系统模块中设定的值和定义的一些环境数据。创建的程序数据由同一个模块或其他模块中的指令进行引用。图中是一条常用的机器人关节运动的指令M oveJ,调用了四个程序数据。 图中所使用的程序数据的说明见表: 5.3.2 程序数据的类型与分类 1.程序数据的类型分类 ABB 机器人的程序数据共有76 个,并且可以根据实际情况进行程序数据的创建,为A BB 机
工业机器人基础操作
目录 项目一工业机器人基本结构认识与安全操作知识 (1) 项目二机器人的基本操作 (11)
项目一工业机器人基本结构认识与安全操作知识 一、布置任务 1.项目要求 (1)项目名称:工业机器人基本结构认识与基础操作 (2)计划课时:6 (3)器材及工具准备(现场准备) 表1 实验所需设备清单 2.教学主要内容及目的 通过该实训课程,将《工业机器人技术基础》中所学的机器人编程及调试技术应用于实际设计中。学习机器人的基本安全操作常识、机器人控制柜的基本结构、机器人示教器的基本操作等技术在实验平台上进行综合认知与练习,在理论和实验的基础上进一步对工业机器人的认识,更好的了解机器人的操作方式。 3.相关知识准备 机器人的基本组成、机器人的基本安全操作常识。 二、制定计划 教师辅助学生以小组方式,10人一组,由指导老师讲解基本操作要领及安全注意事项,讲解完成后,学生自己进行操作,讨论各步骤的注意事项及原因,以讨论加操作的方式进行学习。 三、实施项目任务 1. 实训内容 ①通过现场讲解,学习机器人的基本安全知识,为后续安全操作做基础; ②认识机器人控制柜,了解其主要结构及控制按钮的功能; ③认识示教器的基本操作方法。 2. 实训步骤
(1)工业机器人安全知识 a、记得关闭总电源 在进行机器人的安装、维修、保养时切记要将总电源关闭。带电作业可能会产生致命性后果。如果不慎遭高压电击,可能会导致心跳停止、烧伤或其他严重伤害。 在得到停电通知时,要预先关断机器人的主电源及气源。 突然停电后,要在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。 b、与机器人保持足够安全距离 在调试与运行机器人时,它可能会执行一些意外的或不规范的运动。并且,所有的运动都会产生很大的力量,从而严重伤害个人或损坏机器人工作范围内的任何设备,所以时刻警惕与机器人保持足够的安全距离。 c、静电放电危险 搬运部件或部件容器时,未接地的人员可能会传递大量的静电荷。这一放电过程可能会损坏敏感的电子设备。所以在有此标识的情况下,要做好静电放电防护。 d、紧急停止 紧急停止优先于任何其它机器人控制操作,它会断开机器人电动机的驱动电源,停止所有运转部件,并切断由机器人系统控制且存在潜在危险的功能部件的电源。 出现下列情况时请立即按下任意紧急停止按钮: 机器人运行时,工作区域内有工作人员。 机器人伤害了工作人员或损伤了机器设备。 e、灭火 发生火灾时,在确保全体人员安全撤离后再进行灭火,应先处理受伤人员。当电气设备(例如机器人或控制器)起火时,使用二氧化碳灭火器,切勿使用水或泡沫。 f、工作中的安全 注意夹具并确保夹好工件。如果夹具打开,工件会脱落并导致人员伤害或设备损坏。夹具非常有力,如果不按照正确方法操作,也会导致人员伤害。机器人停机时,夹具上不应置物,必须空机。 g、示教器的安全 示教器的使用和存放应避免被人踩踏电缆。 小心操作。不要摔打、拋掷或重击,这样会导致破损或故障。在不使用该设备时,
4-机器人等级考试实操题—奇怪的时钟
全国青少年机器人技术等级考试(一级) 实际操作考试试卷 考生姓名: 证件编号:□□□□□□□□□□□□□□□□□□一、模型样例 奇怪的时钟 二、作品简答(30分) 1、请在下面写出模型名称以及用途?(5分) 2、请写出该模型中蕴含的知识点?(15分)(1)齿轮传动的组成分析奇怪的时钟模型,时针分针为何转速不同?写出传动过程模型中由把手提供动力的传递过程? (2)模型中把手处运用的是哪种简单机械?(5分) 参考答案: 简答題 1.请写出奇怪时钟的奇怪之处 答案:家里的时钟:时针转动1 周分针转12周:而奇怪时钟:时针转动1周分针转5周。 2.请写出该模型中蕴含的知识点 (1)分析奇怪时钟模型,时针,分针为何转速不同?写出传动过程模型中,由把手提供动力,带动同轴的灰齿轮(小〉转动,灰齿轮(小)分别带动同轴的灰齿轮(中)和啮合的灰齿轮(大)。 (1)灰齿轮(小)带动同轴的灰齿轮(中),同轴转速不变;灰齿轮(中)通过啮合带动上方的灰齿轮(中)连同分针一起转动(分针的灰齿轮不固定在轴上),两个大小相同齿轮啮合,转速不变,所以分针的转动速度=把手的转动速度=灰齿轮(小)的转速。 (2)灰齿轮(小)啮合灰齿轮(大)转动,小齿轮带动大齿轮是减速装置,小齿轮与大齿轮的齿数比为1:5,所以大齿轮转动速度为小齿轮的五分之一;大齿轮带动同轴的时针一起转动,同轴转速不变,所以时针的转动速度=灰齿轮(大)的转速=灰齿轮(小)转速的五分之一。 考试服务中心:考试时间:
所以分针转动速度是时针转动速度的五倍。 (2)模型中把手处运用的是哪种简单机械(10分) 答:轮轴。轮轴由轮和轴组成,能绕共同轴线旋转的机械,叫做轮轴。外环叫轮,内环叫轴。轮轴两个环是同心圆。 轮轴的实质:能够连续旋转的杠杆。 当动力作用在轮上,则轮轴为省力杠杆,轮和轴的半径相差越大则越省力, 但越费距离。动力作用在轴上则轮轴为费力杠杆,轮和轴的半径相差越大则费力,但越省距离。 三、作品展示(70) 请在规定时间内,完成作品搭建调试,并将身份证件及作品置于以下虚线框中,由考评员现场拍摄照片。 作品摆放位置左限
工业机器人操作指南
工业机器人应用 一机器人示教单元使用 1.示教单元的认识 使用示教单元调整机器人姿势 在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。 按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示: 直交调整模式
TOOL调整模式
三轴直交调整模式 圆桶调整模式 在手动运行模式下按“HAND”进入手爪控制界面。在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。 按键“+C”和“-C”对应“OUT-900”和“OUT-901” 按键“+B”和“-B”对应“OUT-902”和“OUT-903” 按键“+A”和“-A”对应“OUT-904”和“OUT-905” 按键“+Z”和“-Z”对应“OUT-906”和“OUT-907” 在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。使用示教单元设置坐标点 先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列: J1: J5: J2: J6: J3: J4: 先按“FUNCTION”功能键,再按“F4”键退出调整界面。然后按下“F1”键进入