自动控制原理-线性系统的根轨迹实验报告
线性系统的根轨迹
一、 实验目的
1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB 语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
4. 掌握系统参数变化对特征根位置的影响。
二、 实验容
1. 请绘制下面系统的根轨迹曲线。 )
136)(22()(22++++=s s s s s K s G )
10)(10012)(1()12()(2+++++=s s s s s K s G )11.0012.0)(10714.0()105.0()(2++++=
s s s s K s G 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的围。
2. 在系统设计工具rltool 界面中,通过添加零点和极点方法,试凑出上述系统,并
观察增加极、零点对系统的影响。
三、 实验结果及分析
1.(1) )
136)(22()(22++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序:
num=[1];
den=[1 8 27 38 26 0];
rlocus(num,den)
[r,k]=rlocfind(num,den)
grid
xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus')
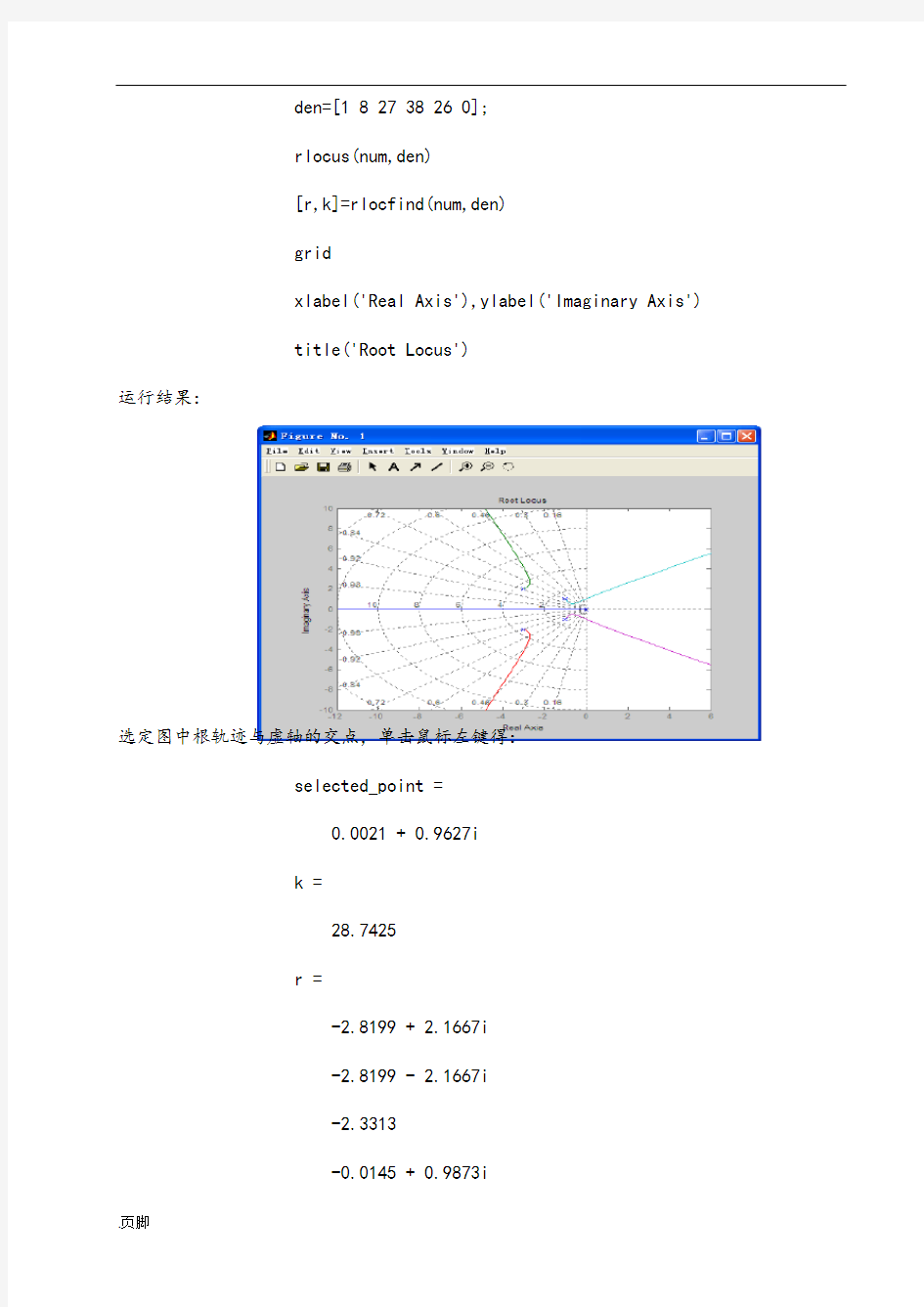
运行结果:
选定图中根轨迹与虚轴的交点,单击鼠标左键得:
selected_point =
0.0021 + 0.9627i
k =
28.7425
r =
-2.8199 + 2.1667i
-2.8199 - 2.1667i
-2.3313
-0.0145 + 0.9873i
结论:
根轨迹与虚轴有交点,所以在K 从零到无穷变化时,系统的稳定性会发生变化。由根轨迹图和运行结果知,当0 (2) ) 10)(10012)(1()12()(2+++++=s s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: num=[1 12]; den=[1 23 242 1220 1000]; rlocus(num,den) [k,r]=rlocfind(num,den) grid xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus') 运行结果: 选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point = k = 1.0652e+003 r= -11.4165 + 2.9641i -11.4165 - 2.9641i -0.0835 + 9.9528i -0.0835 - 9.9528i 结论: 根轨迹与虚轴有交点,所以在K 从零到无穷变化时,系统的稳定性会发生变化。 由根轨迹图和运行结果知,当0 (3)) 11.0012.0)(10714.0()105.0()(2++++=s s s s K s G 的根轨迹的绘制: MATLAB 语言程序: num=[0.05 1]; den=[0.0008568 0.01914 0.1714 1 0]; rlocus(num,den) [k,r]=rlocfind(num,den) grid xlabel('Real Axis'),ylabel('Imaginary Axis') title('Root Locus') 运行结果: 选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point = 0.0237 + 8.3230i k = 7.6385 r = -0.0916 + 8.4713i -0.0916 - 8.4713i -11.0779 + 1.2238i -11.0779 - 1.2238i 结论: 根轨迹与虚轴有交点,所以在K从零到无穷变化时,系统的稳定性会发生变化。由根轨迹图和运行结果知,当0 (4)根轨迹绘制规则分析: 由以上根轨迹图知,根轨迹起于开环极点,终于开环零点。在复平面上标出系统的开环零极点后,可以根据其零极点数之和是否为奇数确定其在实轴上的分布。根轨迹的分支数等于开环传递函数分子分母中的最高阶次,根轨迹在复平面上是连续且关于实轴对称的。当开环传递函数的分子阶次高于分母阶次时,,根轨迹有n-m 条沿着其渐近线趋于无穷远处。根轨迹位于实轴上两个相邻的开环极点或者相邻零点之间存在分离点,两条根轨迹分支在复平面上相遇在分离点以某一分离角分开;不在实轴上的部分,根轨迹以起始角离开开环复极点,以终止角进入开环复零点。有的根轨迹随着K 的变化会与虚轴有交点。在画图时,确定了以上的各个参数或者特殊点后,就可得系统的根轨迹概略图。 2. 观察增加极、零点对系统的影响: (1)通过添加零、极点凑系统) 136)(22()(22++++=s s s s s K s G : 先令G(s)=1/s,则可得其单位阶跃响应波形图为 然后逐步添加如下: 第一步、添加共轭极点-1+j1和-1-j1得到G(s)=1/[s(s2+2s+2)],运行可得其单位阶跃响应波形为 第二步、添加共轭极点-3+j2和-3-j2得到G(s)=1/[s(s2+2s+2)( s2+6s+13)],运行后可得其单位阶跃响应波形为