GA与系统辨识
系统辨识算法
系统辨识算法一、引言系统辨识是指通过对系统输入输出数据进行观测和分析,从而建立数学模型以描述和预测系统行为的过程。
系统辨识算法是在给定输入输出数据的基础上,利用数学方法和计算机模拟技术,对系统的结构和参数进行估计和辨识的算法。
系统辨识算法在控制工程、信号处理、机器学习等领域具有广泛的应用。
二、系统辨识方法系统辨识方法可以分为参数辨识和非参数辨识两类。
1. 参数辨识参数辨识是指通过对系统模型中的参数进行估计,来描述和预测系统的行为。
常用的参数辨识方法有最小二乘法、最大似然估计法、递推最小二乘法等。
最小二乘法是一种基于最小化误差平方和的优化方法,通过优化目标函数来估计参数值。
最大似然估计法是一种基于概率统计理论的方法,通过似然函数最大化来估计参数值。
递推最小二乘法是一种基于递推迭代的方法,通过更新参数估计值来逼近真实参数值。
2. 非参数辨识非参数辨识是指通过对系统的输入输出数据进行分析,来估计系统的结构和参数。
常用的非参数辨识方法有频域分析法、时域分析法、小波分析法等。
频域分析法是一种基于信号频谱特性的方法,通过对输入输出信号的频谱进行分析,来估计系统的频率响应。
时域分析法是一种基于信号时域特性的方法,通过对输入输出信号的时序关系进行分析,来估计系统的时域特性。
小波分析法是一种基于小波变换的方法,通过对输入输出信号的小波变换系数进行分析,来估计系统的时频特性。
三、系统辨识应用系统辨识算法在实际工程中有着广泛的应用。
1. 控制工程系统辨识算法在控制系统设计中起到关键作用。
通过对控制对象进行辨识,可以建立准确的数学模型,从而设计出性能优良的控制器。
例如,在自适应控制中,可以利用系统辨识算法来实时辨识系统模型,从而根据实际系统特性调整控制器参数。
2. 信号处理系统辨识算法在信号处理领域有重要应用。
通过对信号进行辨识,可以提取信号的特征和结构,从而实现信号去噪、信号分析、信号识别等目标。
例如,在语音信号处理中,可以利用系统辨识算法来建立语音模型,进而实现语音识别和语音合成。
基于IGA的多层神经网络BP算法及在系统辨识中的应用

慢且 易 陷入 局 部极 小 点而 无法 自拔 。故 将 两者 结 合 , 扬 长避 短 , 可 获得 较 满 意 的 实 验 结果 。 目前 , G 与 将 A NN结 合 起来 的文章 已有一 些报 道 , 多数是 摒弃 神 经 网络 的算法 而 只采 用 遗传 算 法 来 训 练 NN 的权 值 , 但 在 精 度不 高 的情 况 下 , A迭代 几 百代 后 可 获得 近 似 的 解 , 要 将精 度 提 高 , 需 要 花 费 相 当大 的 代 价 或 者 根 G 若 则
维普资讯
第 1 7卷
第 2期
西
南
工
学
院
学
报
Vo . 7 No 2 11 .
20 0 2年 6月
J OURNAL OF S OUTHW ES I TI T NS TUTE OF TECHNOL OGY
J n. 0 2 u 2 0
摘 要 : 文针 对 用 G 训 练 NN 权 值 时 , 费的 代 价 随精 度 的提 高而 剧 烈 增加 的缺 陷 , 出 了一 本 A 花 提 种 利 用 I A较 强的全 局搜 索能 力和 I P 较 强的局 部搜 索能 力的 结合 算 法 ; 利 用 I A 优 化 多层 前 G BA 先 G 馈 神 经 网络 的权值 , 然后 再 用 I P 提 高搜 索精 度 , 效地避 免 了 I P 易 陷入 局 部 极 小 点和 I A 过 BA 有 B A G
早 收敛 的缺 点 , 实验 结果 表 明 , 此算 法是有 效 的 。
关键 词 : 遗传 算 法 ; 经 网络 ; P算法 ; 神 B 系统辨 识 中 图分类 号 : 2 3 2 TP 7 . 文献标 识 码 : A
基于GA遗传算法的ARMA模型的辨识方法

(一 志 一∑口 (~ ) ) k +∑b (— ) £ ) y k + ( , u 志
i 1 i t 1 一
其 中 : a , , 6 , 2 … , 为 待 辨 识 的 参 a ,2 … n ;1b, b
数。
有 辨识 例子都 适用 , 且对 于较 复杂 的辨识例 子 , 而 传 统算 法易 陷入 局 部极 值 , 系统 受 到 有 色 噪声 当
维普资讯
第3 o卷第 1期
20 0 7年 2月
武 汉 科 技 大 学 学 报 (自 然 科 学 版 )
J f u a i f c & T c . Nau a S in eE i o ) .o h nUn.o i W S . eh ( trl c c dt n e i
统等 价 的系统 。系统 辨识 分为 模型 辨识 和参数 辨
识, 后者是 本 文研 究 的 中心 。传 统 的 参数 辨 识 方
法虽 然 已经发 展 得 比较 成 熟 和完 善 , 如最 小 二 乘
法 、 ] 极大似 然法 , 它们 都是 建立在 具有 连续 导 但
数 的光 滑搜索 空 间的假 设基础 上 , 因此 , 并非 对所
g r h GA) 现 代方 法 的辨 识 手 段_ , 些 方 oi m, t 等 3这 ]
法 大 大丰富 了参 数 辨识 的手 段 , 取 得 了很 好 的 并
( 一 愚 一∑三 (~ ) 占 (— )相应的 ) k +∑ k , y u
i 1 ; I 1 1
预测 误差 :( ) ( ) ( ) e k = 志 一Y 愚 。用 于衡 量 辨识 模
污染 时 , 传统 的 辨 识方 法 很 难 得 到 理想 效 果 。近
系统辨识方法
系统辨识方学习总结一.系统辨识的定义关于系统辨识的定义,Zadeh是这样提出的:“系统辨识就是在输入和输出数据观测的基础上,在指定的一组模型类中确定一个与所测系统等价的模型”。
L.Ljung也给“辨识即是按规定准则在一类模型中选择一个与数据拟合得最好的模型。
出了一个定义:二.系统描述的数学模型按照系统分析的定义,数学模型可以分为时间域和频率域两种。
经典控制理论中微分方程和现代控制方法中的状态空间方程都是属于时域的范畴,离散模型中的差分方程和离散状态空间方程也如此。
一般在经典控制论中采用频域传递函数建模,而在现代控制论中则采用时域状态空间方程建模。
三.系统辨识的步骤与内容(1)先验知识与明确辨识目的这一步为执行辨识任务提供尽可能多的信息。
首先从各个方面尽量的了解待辨识的系统,例如系统飞工作过程,运行条件,噪声的强弱及其性质,支配系统行为的机理等。
对辨识目的的了解,常能提供模型类型、模型精度和辨识方法的约束。
(2)试验设计试验设计包括扰动信号的选择,采样方法和间隔的决定,采样区段(采样数据长度的设计)以及辨识方式(离线、在线及开环、闭环等的考虑)等。
主要涉及以下两个问题,扰动信号的选择和采样方法和采样间隔(3)模型结构的确定模型类型和结构的选定是决定建立数学模型质量的关键性的一步,与建模的目的,对所辨识系统的眼前知识的掌握程度密切相关。
为了讨论模型和类型和结构的选择,引入模型集合的概念,利用它来代替被识系统的所有可能的模型称为模型群。
所谓模型结构的选定,就是在指定的一类模型中,选择出具有一定结构参数的模型M。
在单输入单输出系统的情况下,系统模型结构就只是模型的阶次。
当具有一定阶次的模型的所有参数都确定时,就得到特定的系统模型M,这就是所需要的数学模型。
(4)模型参数的估计参数模型的类型和结构选定以后,下一步是对模型中的未知参数进行估计,这个阶段就称为模型参数估计。
(5)模型的验证一个系统的模型被识别出来以后,是否可以接受和利用,它在多大程度上反映出被识别系统的特性,这是必须经过验证的。
《系统辨识》新方法
《系统辨识》新方法随着科技的不断进步,系统辨识领域也迎来了新的突破和发展。
系统辨识是指通过对系统内部结构和参数进行分析和推断,以获取对系统行为的认识和预测的过程。
它在工程控制、信号处理、机器学习等领域有着广泛的应用。
在过去,系统辨识主要依靠数学建模和理论推导来实现,但是这种方法往往需要大量的先验知识和较为复杂的计算过程。
如今,随着人工智能、深度学习等技术的发展,一些新的方法开始被引入到系统辨识领域,为系统辨识带来了新的可能性和机遇。
一种新的方法是基于深度学习的系统辨识。
深度学习是一种基于大数据和多层神经网络的机器学习方法,它可以通过学习大量的数据来获取系统的内在模式和规律。
在系统辨识中,深度学习可以应用于对系统状态的预测、参数的估计以及对系统模型的推断。
相比于传统的数学建模方法,基于深度学习的系统辨识在处理非线性系统和高维数据时更加灵活和高效。
它可以直接从数据中学习系统的内在特征,无需假设系统的具体数学结构,从而能够更准确地对系统进行辨识和预测。
另一种新的方法是基于强化学习的系统辨识。
强化学习是一种通过智能体和环境的交互来学习最优行为策略的机器学习方法,它可以应用于系统的参数优化和控制器设计。
在系统辨识中,强化学习可以通过持续的试错和调整来逐步优化系统的辨识性能。
通过与环境的交互和反馈,强化学习可以逐步改进系统辨识的准确性和稳定性。
相比于传统的批量学习方法,基于强化学习的系统辨识可以更好地适应系统的变化和非线性特性。
除了深度学习和强化学习,还有一些其他新的方法也开始被引入到系统辨识领域。
基于图神经网络的系统辨识可以通过对系统的结构和拓扑进行学习和推断,从而实现对复杂系统的辨识和模型推断。
而基于元学习的系统辨识则可以通过对辨识任务的学习和泛化来提升系统辨识的鲁棒性和适应性。
这些新的方法为系统辨识带来了更加丰富和多样的可能性,为工程实践和科学研究提供了新的思路和工具。
新方法也面临着一些挑战和问题。
新方法往往对大量的数据和计算资源有着较高的要求,这对于一些实时性要求较高的系统辨识任务来说可能会存在一定的局限性。
控制系统中的系统辨识与自适应控制
控制系统中的系统辨识与自适应控制在控制系统中,系统辨识与自适应控制是两个关键的方面。
系统辨识是指通过实验或推理的方法,从输入和输出的数据中提取模型的参数和结构信息,以便更好地理解和控制系统的行为。
而自适应控制是指根据系统辨识得到的模型参数和结构信息,实时地调整控制器的参数以适应系统变化,以提高控制性能。
一、系统辨识1.1 参数辨识参数辨识是指确定系统动态模型中的参数。
常用的方法包括最小二乘法、极大似然估计法等。
最小二乘法是一种常见的参数辨识方法,通过最小化实际输出与模型输出之间的误差平方和来确定参数。
1.2 结构辨识结构辨识是指确定系统动态模型的结构,包括确定系统的阶数、输入输出关系等。
常用的结构辨识方法有ARX模型、ARMA模型等。
ARX模型是指自回归外部输入模型,适用于输入输出具有线性关系的系统。
ARMA模型是指自回归滑动平均模型,适用于输入输出关系存在滞后效应的系统。
二、自适应控制自适应控制是根据系统辨识得到的模型参数和结构信息,动态地调整控制器的参数以适应系统的变化。
常用的自适应控制方法有模型参考自适应控制、模型预测控制等。
2.1 模型参考自适应控制模型参考自适应控制是建立在系统辨识模型基础上的控制方法。
通过将系统输出与参考模型输出进行比较,通过调整控制器参数来减小误差。
常见的模型参考自适应控制方法有自适应PID控制、自适应模糊控制等。
2.2 模型预测控制模型预测控制是一种基于系统辨识模型的控制策略,通过对系统未来的状态进行预测,以求得最优控制输入。
模型预测控制可以同时考虑系统的多个输入和多个输出,具有较好的控制性能。
三、应用案例3.1 机械控制系统在机械控制系统中,系统辨识和自适应控制可以被应用于伺服控制系统。
通过系统辨识可以得到伺服电机的动态模型,然后利用自适应控制方法调整PID控制器的参数,以提高伺服系统的响应速度和稳定性。
3.2 化工控制系统在化工控制系统中,系统辨识和自适应控制可以被应用于控制某个反应器的温度。
系统辨识理论及应用
系统辨识理论及应用本文旨在介绍系统辨识理论及其在实际应用中的重要性和背景。
系统辨识是一种重要的工具和技术,用于分析和推测系统的特性和行为。
通过系统辨识,我们能够对系统进行建模、预测和控制。
系统辨识理论的起源可以追溯到控制工程学科,并逐渐扩展到其他领域,如信号处理、人工智能和统计学等。
它在工程、科学和经济等领域都有广泛的应用。
系统辨识的目标是通过观察系统的输入和输出数据,从中提取出系统的特征和动态模型。
系统辨识理论和应用的重要性在于它能帮助我们理解和掌握复杂系统的行为,并能够对系统进行建模和预测。
通过系统辨识,我们可以获取关键的系统参数和结构信息,从而为系统设计和控制提供指导和支持。
本文将介绍系统辨识理论的基本原理和方法,包括信号采集和预处理、模型结构的选择和参数估计等。
我们还将探讨系统辨识在不同领域的应用案例,如机械系统、电力系统和金融市场等。
希望本文能够为读者提供关于系统辨识理论及应用的基本概念和方法,并激发对系统辨识领域的进一步研究兴趣。
本文将概述系统辨识理论的基本原理和方法,并介绍其在不同领域的应用。
系统辨识是一种通过分析数据和模型之间关系来推断系统特性和行为的方法。
它基于数学和统计学的原理,将现实世界中的系统建模为数学模型,并利用实验或观测数据来验证和修正这些模型。
系统辨识的基本原理是通过获取系统的输入和输出数据,并根据数据推断系统的结构、参数和动态特性。
通过此过程,系统辨识能帮助我们了解系统的内部机制和行为。
常用的系统辨识方法包括参数辨识、结构辨识和状态辨识。
参数辨识主要关注模型中的参数值,通过数据分析和优化算法来确定最佳参数估计值。
结构辨识则关注模型的拓扑结构,即确定模型的数学表达形式和连接关系。
状态辨识是根据系统的输入和输出数据,推断系统的状态变量值和状态转移方程。
系统辨识在各个领域有着广泛的应用。
在控制工程领域,系统辨识可以帮助设计控制器和优化控制策略。
在信号处理领域,系统辨识可以用于信号分析和滤波。
《系统辨识》新方法
《系统辨识》新方法引言系统辨识是指通过收集系统的输入和输出数据,建立数学模型来描述系统的动态特性和行为规律的过程。
它在工程控制、通信系统、经济学、生物学等领域都有着广泛的应用。
传统的系统辨识方法包括最小二乘法、频域法、状态空间法等,然而这些方法在处理高维复杂系统时往往面临着诸多困难和局限性。
开发新的系统辨识方法成为当前研究的重要方向之一。
1. 基于深度学习的系统辨识方法深度学习是近年来发展迅猛的机器学习方法,其在图像识别、语音识别等领域已经取得了巨大的成功。
研究者们开始将深度学习方法引入系统辨识领域,希望通过深度神经网络对系统的非线性动态进行建模。
与传统的线性模型相比,深度学习方法更加灵活和准确,能够处理更加复杂的系统动态特性。
有研究者利用深度学习方法对非线性动力学系统进行辨识,取得了较好的效果。
这为系统辨识方法带来了新的思路和突破口。
2. 基于信息论的系统辨识方法信息论是研究信息传输、存储和处理的数学理论。
近年来,一些研究者开始探索将信息论方法引入系统辨识领域。
信息论方法可以量化系统输入与输出之间的信息流动,从而揭示系统的动态行为。
使用信息论方法进行系统辨识,不仅可以对系统的稳定性和故障诊断进行分析,还可以对系统的冗余信息和关键信息进行提取,提高辨识的准确性和鲁棒性。
基于信息论的系统辨识方法正逐渐受到研究者的重视。
3. 基于数据驱动的系统辨识方法传统的系统辨识方法需要先对系统的数学模型进行假设和构建,然后根据收集到的数据对模型进行参数估计和验证。
然而在实际应用中,许多系统的动态特性往往十分复杂,很难通过已知的数学模型来描述。
一些研究者开始提倡使用数据驱动的方法进行系统辨识。
即直接利用系统的输入和输出数据,通过数据挖掘和模式识别技术来揭示系统的内在规律和动态特性。
这种方法不需要对系统进行先验假设,能够更好地适应复杂系统的辨识需求。
4. 基于机器学习的系统辨识方法机器学习是一种实现人工智能的方法,其包括监督学习、无监督学习、强化学习等技术。
系统辨识理论及应用

系统辨识理论及应用引言系统辨识是通过对已知输入和输出进行处理,从而识别出系统的数学模型并进行建模的过程。
在现代科学和工程应用中,系统辨识技术被广泛应用于控制系统设计、信号处理、预测和模型识别等领域中。
本文将介绍系统辨识的理论基础、常用方法以及在实际应用中的案例分析,以便读者能够更好地了解系统辨识技术的原理和应用。
系统辨识的理论基础系统辨识的定义系统辨识是一种通过对系统的输入和输出数据进行处理,来推导出系统的数学模型的方法。
系统辨识可以用来描述和预测系统的行为,从而实现对系统的控制和优化。
系统辨识的基本原理系统辨识建模的基本思想是将输入和输出之间的关系表示为一个数学模型。
这个模型可以是线性模型、非线性模型、时变模型等。
在系统辨识中,常用的数学模型包括差分方程模型、状态空间模型、传递函数模型等。
系统辨识的基本原理是通过收集系统的输入和输出数据,然后利用数学方法来推导出系统的数学模型。
这个过程可以看作是一个参数优化的过程,通过不断调整模型参数,使得模型的输出与实际系统的输出尽可能接近。
系统辨识的常用方法系统辨识的常用方法包括参数估计方法、频域分析方法和结构辨识方法。
参数估计方法是最常用的系统辨识方法之一,它通过最小化模型的预测误差来估计模型参数。
常用的参数估计方法包括最小二乘法、最大似然估计法、最小二乘法等。
频域分析方法是基于系统的频率响应特性进行辨识的方法。
常用的频域分析方法包括递归最小二乘法、频域辨识方法等。
结构辨识方法是用来确定系统的结构的方法。
结构辨识方法可以分为模型选择方法和模型结构确定方法。
常用的结构辨识方法包括正则化算法、信息准则准则方法等。
系统辨识的应用控制系统设计系统辨识技术在控制系统设计中起着重要的作用。
通过对系统辨识建模,可以对系统进行建模和优化。
控制系统设计中的系统辨识可以用来预测系统的响应、设计合适的控制器以及优化控制算法。
信号处理系统辨识技术在信号处理中也有广泛的应用。
通过对信号进行系统辨识建模,可以分析信号的特性、提取信号中的有用信息以及去除信号中的干扰等。
系统辨识的基本概念
系统辨识涉及到的主要概念包括输入/ 输出数据、模型结构、算法和系统内 部结构等。这些概念相互关联,共同 构成了系统辨识的基本框架。
02
系统辨识的应用领域
控制系统
控制系统是工程和科学中一个非常重 要的领域,它涉及到对动态系统的建 模、分析和控制。系统辨识在控制系 统中有着广泛的应用,主要用于建立 系统的数学模型。通过输入和输出数 据,利用系统辨识方法可以估计出系 统的参数和状态,进一步用于控制系 统的设计和优化。
背景
随着现代工业和科技的快速发展,许多复杂系统如控制系统 、通信系统、生物系统等都需要精确的数学模型来进行有效 的分析和控制。系统辨识作为获取这些数学模型的关键技术 ,在许多领域中都得到了广泛应用。
系统辨识的定义
定义
系统辨识是根据系统的输入和输出数 据,通过特定的算法和模型结构,来 推断系统的内部结构和动态特性。
例如,在语音识别中,系统辨识可以用于建立语音信号的模型,提高语音识别的准确率;在雷达信号处理中,系统辨识可以 用于估计目标的距离和速度等参数。
机器学习
机器学习是人工智能的一个重要分支,它涉及到从数据中学习和提取知识。系统辨识在机器学习中也 有着重要的应用,主要用于模型的建立和优化。通过系统辨识方法,可以从数据中估计出模型的参数 和结构,进一步用于机器学习的算法设计和优化。
考虑模型的泛化能力
确保模型不仅在训练数据上表现良好,还能对未知数 据进行有效的预测。
进行模型优化和调整
根据验证结果,对模型进行优化和调整,以提高模型 的预测精度和泛化能力。
04
系统辨识的方法
最小二乘法
最小二乘法是一种数学优化技术,通过最小化误差的平方和来寻找数据的最佳函 数匹配。在系统辨识中,最小二乘法常用于参数估计,通过输入和输出数据,估 计系统的参数。
《系统辨识》新方法

《系统辨识》新方法摘要:系统辨识是指通过对系统进行实验观测和数据分析,建立系统的数学模型,并利用该模型进行系统的性能预测、控制和优化的一种方法。
在过去的几十年里,系统辨识方法得到了广泛的应用,但是随着科技的不断进步,传统的系统辨识方法在某些情况下已经显露出其局限性。
本文将介绍一种新的系统辨识方法,该方法结合了深度学习和数据驱动的优势,能够更准确地辨识系统,并在实际应用中取得了较好的效果。
关键词:系统辨识;深度学习;数据驱动随着深度学习技术的发展,一种新的系统辨识方法逐渐受到了研究者们的重视。
这种新方法结合了深度学习的优势,能够更好地挖掘数据之间的内在关系,并在模型辨识的过程中更准确地捕捉系统的动态特性和非线性特征。
与传统的系统辨识方法相比,基于深度学习的系统辨识方法在处理非线性系统、大规模系统和高维数据方面具有更好的性能。
二、基于深度学习的系统辨识方法基于深度学习的系统辨识方法主要应用于数据驱动建模的场景。
这种方法首先通过对系统进行实验观测和数据采集,获取系统的输入输出数据。
然后利用深度学习模型对这些数据进行学习和分析,从而建立系统的数学模型。
利用所建立的模型对系统进行性能预测、控制和优化。
基于深度学习的系统辨识方法与传统的系统辨识方法相比,具有以下几个优势:1. 能够更好地捕捉系统的非线性特征。
深度学习模型具有强大的非线性建模能力,能够更准确地捕捉系统的非线性动态特性。
2. 能够更好地处理大规模系统和高维数据。
深度学习模型能够有效地处理大规模系统和高维数据,能够在更广泛的应用场景下进行系统辨识。
3. 能够更好地挖掘数据之间的内在关系。
深度学习模型能够从大量数据中挖掘出数据之间的内在关系,能够更准确地建立系统的数学模型。
三、基于深度学习的系统辨识在实际应用中的效果基于深度学习的系统辨识在实际应用中取得了较好的效果,主要体现在以下几个方面:1. 在工业控制领域,基于深度学习的系统辨识方法能够更准确地建立复杂系统的数学模型,实现对系统的精确控制。
系统辨识和降阶模型
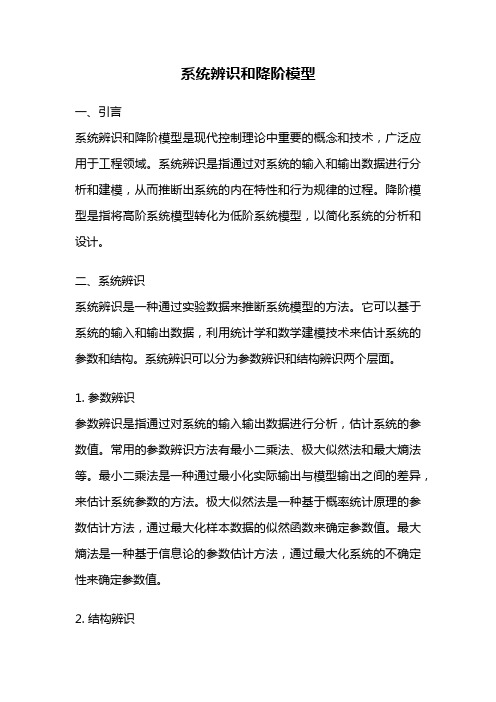
系统辨识和降阶模型一、引言系统辨识和降阶模型是现代控制理论中重要的概念和技术,广泛应用于工程领域。
系统辨识是指通过对系统的输入和输出数据进行分析和建模,从而推断出系统的内在特性和行为规律的过程。
降阶模型是指将高阶系统模型转化为低阶系统模型,以简化系统的分析和设计。
二、系统辨识系统辨识是一种通过实验数据来推断系统模型的方法。
它可以基于系统的输入和输出数据,利用统计学和数学建模技术来估计系统的参数和结构。
系统辨识可以分为参数辨识和结构辨识两个层面。
1. 参数辨识参数辨识是指通过对系统的输入输出数据进行分析,估计系统的参数值。
常用的参数辨识方法有最小二乘法、极大似然法和最大熵法等。
最小二乘法是一种通过最小化实际输出与模型输出之间的差异,来估计系统参数的方法。
极大似然法是一种基于概率统计原理的参数估计方法,通过最大化样本数据的似然函数来确定参数值。
最大熵法是一种基于信息论的参数估计方法,通过最大化系统的不确定性来确定参数值。
2. 结构辨识结构辨识是指通过对系统的输入输出数据进行分析,估计系统的结构和模型形式。
常用的结构辨识方法有模型选择准则、系统辨识算法和系统辨识工具等。
模型选择准则是一种评估不同模型的性能和复杂度的方法,常用的准则有AIC准则、BIC准则和MSE准则等。
系统辨识算法是一种通过计算机程序对系统数据进行处理和分析,从而得到系统模型的方法。
系统辨识工具是一种用于辅助系统辨识的软件工具,常用的工具有MATLAB、LabVIEW和Python等。
三、降阶模型降阶模型是指将高阶系统模型转化为低阶系统模型的过程。
降阶模型可以简化系统的分析和设计,提高系统性能和控制效果。
常用的降阶模型方法有模型约简、系统分解和模型识别等。
1. 模型约简模型约简是一种通过舍弃系统模型中的一部分变量和参数,从而降低模型复杂度的方法。
常用的模型约简方法有特征值分解、奇异值分解和模态分析等。
特征值分解是一种通过对系统矩阵进行特征值分解,从而得到系统的特征向量和特征值的方法。
系统辨识的基本概念

系统正确描述系统动态性能的数学摸型——就成了自 动控制 理论 和工程实践的重要组成部分。
系统辨识就是从对系统进行观察和测量所获得的信
息重提取系统数学模型的一种理论和方法。日渐成熟。
建模——成为各门学科的共同语言。
系统辨识的基本概念
2
1.1 系统和模型
1.1.1 系统
(system/process)
到95%时的调节时间。
26
系统辨识的基本概念
4、数据的零值化处理
•差分法(Isermann,1981)
•平均法
•剔除高频成分(一般采用低通滤波器)
5、模型结构辨识
模型验前结构的假定、模型结构参数的确定。
6、模型参数辨识(本课程的主要内容)
当模型结构确定后,进行的就是模型参数辨识
7、模型检验
模型检验是辨识不可缺少的步骤。常用的有“白色度”检验
18
系统辨识的基本概念
● 误差准则
L
J() f ((k))
k1
也叫等价准则、误差准则、损失函数或准则函数。
用的最多的是: f((k))2(k)
● 输出误差准则: ( k ) z ( k ) z m ( k ) z ( k )[ u ( k )]
● 输入误差准则: ( k ) u ( k ) u m ( k ) u ( k ) 1 [z ( k )]
12
系统辨识的基本概念
又置:
logP(k) logV (k) logc
令
y(k) z(k)
logP(k),1 logV (k),2
logc
h(k) [z(k),1]t
[1,2]
则y(k和 ) h(k)都是可观测的变量应,的对最小二乘格式
《系统辨识》新方法
《系统辨识》新方法系统辨识是指通过对一组输入和输出数据进行分析和处理,推导出系统的数学模型和内部参数的过程。
它是掌握系统的动态行为和性能特性的重要手段,广泛应用于控制工程、通信工程、信号处理、经济管理等领域。
传统的系统辨识方法主要依赖于数学模型的建立和参数估计,但由于现实系统的复杂性和不确定性,传统方法在某些情况下存在局限性。
为解决这些问题,人们不断提出新的系统辨识方法。
本文将介绍几种新方法。
一种新方法是基于深度学习的系统辨识。
深度学习是人工智能领域的一个重要分支,其核心是通过构建具有多层非线性特征表达的神经网络模型来解决复杂问题。
在系统辨识中,基于深度学习的方法通过神经网络学习系统的输入和输出之间的非线性映射关系,从而推导出系统的数学模型和内部参数。
与传统方法相比,基于深度学习的系统辨识方法具有更好的适应性和泛化能力,可以处理复杂的非线性系统,并对噪声和干扰具有较强的鲁棒性。
另一种新方法是基于数据驱动的系统辨识。
传统的系统辨识方法需要事先对系统进行建模和参数化,然后通过对系统的输入和输出数据进行拟合和优化,来估计模型的参数。
而基于数据驱动的系统辨识方法不需要对系统进行建模,而是直接通过对系统的输入和输出数据进行分析和处理,推导出系统的数学模型和内部参数。
这种方法的优点是简单易行、快速高效,适用于对系统进行快速辨识和性能分析。
随着科学技术的进步和人们对系统辨识需求的不断增加,新的系统辨识方法不断涌现。
这些新方法通过借鉴深度学习、数据驱动和模型无关的思想和技术,提供了更加灵活、高效和适应性强的系统辨识手段,为实际应用和理论研究提供了新的思路和方法。
随着研究的深入和实践的推进,相信这些新方法将在未来得到广泛的应用和推广。
系统辨识研究方法综述
系统辨识研究方法综述摘要:对现有的系统辨识方法进行了介绍。
首先说明了系统辨识的传统方法及其不足,进一步引出了把神经网络、遗传算法、模糊逻辑、小波网络等知识应用于系统辨识得到的一些新型辨识方法,最后介绍了系统辨识未来的发展方向。
关键词:系统辨识;神经网络;遗传算法;模糊逻辑;小波网络。
1.系统辨识概述辨识、状态估计和控制理论是现代控制理论三个相互渗透的领域。
辨识和状态估计离不开控制理论的支持,控制理论的应用又几乎不能没有辨识和状态估计技术。
随着控制过程复杂性的提高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。
然而在大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,因此利用控制理论去解决实际问题时,首先需要建立被控对象的数学模型。
系统辨识正是适应这一需要而形成的,他是现代控制理论中一个很活跃的分支。
社会科学和自然科学领域已经投入相当多的人力去观察、研究有关的系统辨识问题。
系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。
从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。
辨识问题可以归结为用一个模型来表示可观系统(或将要改造的系统)本质特征的一种演算,并用这个模型吧对客观系统的理解表示成有用的形式。
当然可以刻有另外的描述,辨识有三个要素:数据,模型类和准则。
辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型。
总而言之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合所关心的实际过程的静态或动态特性。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
系统辨识知识点总结归纳

系统辨识知识点总结归纳一、系统辨识的基本概念系统辨识是指通过对系统的输入和输出进行观察和测量,利用数学模型和算法对系统的结构和行为进行识别和推断的过程。
它在工程技术领域中起着重要的作用,可以用来分析和预测系统的性能,对系统进行控制和优化。
系统辨识涉及信号处理、数学建模、统计推断等多个领域的知识,是一门非常复杂的学科。
二、系统辨识的基本原理系统辨识的基本原理是基于系统的输入和输出数据,利用数学模型和算法对系统的结构和参数进行识别和推断。
其基本步骤包括数据采集、模型建立、参数估计、模型验证等。
系统辨识的关键是如何选择合适的模型和算法,以及如何对系统的输入数据进行预处理和分析。
同时,还需要考虑数据的质量和可靠性,以及模型的简单性和准确性等因素。
三、系统辨识的方法和技术系统辨识的方法和技术包括参数辨识、结构辨识、状态辨识等,具体有线性系统辨识、非线性系统辨识、时变系统辨识、多变量系统辨识等。
这些方法和技术涉及到信号处理、最优控制、统计推断、神经网络、模糊逻辑等多个领域的知识,可以根据不同的系统和问题,选择合适的方法和技术进行应用。
四、系统辨识的应用领域系统辨识的应用领域非常广泛,包括控制系统、信号处理、通信系统、生物医学工程、工业生产等。
在控制系统中,系统辨识可以用来设计控制器,提高系统的稳定性和性能。
在信号处理中,系统辨识可以用来提取信号的特征,分析信号的性质。
在通信系统中,系统辨识可以用来设计调制解调器,提高系统的传输效率和可靠性。
在生物医学工程中,系统辨识可以用来分析生物信号,诊断疾病和设计医疗设备。
在工业生产中,系统辨识可以用来优化生产过程,提高产品质量和效率。
五、系统辨识的发展趋势随着科学技术的不断发展,系统辨识也在不断地发展和完善。
未来,系统辨识的发展趋势主要包括以下几个方面:一是理论方法的创新,将更多的数学、统计和信息理论方法引入系统辨识中,提高系统辨识的理论基础和分析能力;二是算法技术的提高,利用机器学习、深度学习等先进的算法技术,对系统进行更加准确和高效的辨识;三是应用领域的拓展,将系统辨识应用到更多的领域和行业中,为社会经济发展和科技进步作出更大的贡献。
《GA与系统辨识》课件

与其他智能算法的结合
未来研究可能会更加注重将遗 传算法与其他智能算法(如蚁 群算法、粒子群算法等)进行 结合,以充分利用各种算法的 优势,提高系统辨识的性能。
课程总结
课程主要内容回顾
本课程主要介绍了遗传算法的基本原理、系统辨 识的概念和原理、遗传算法在系统辨识中的应用 等。
组件或连接方式时,GA能够找到最优的组合方式。
利用GA优化系统性能
性能评估
利用GA可以对系统的性能进行评估和预测。通过建立性能评估模型,将性能指标作为遗传算法的适应度函数,GA可 以找到最优的性能参数组合。
多目标优化
在某些情况下,系统的性能可能存在多个相互矛盾的目标,例如稳定性与能耗。GA能够处理多目标优化问题,找到 一个平衡点,使得系统在多个目标上都能达到较好的性能。
基于GA的系统结构优化案例
总结词
通过遗传算法优化系统结构,提高系统性能。
详细描述
遗传算法也可以用于优化系统的结构,例如,在神经网络设计中,可以通过遗传算法对神经元的连接 方式和权重进行优化,以达到更好的分类或预测效果。在机械设计中,可以通过遗传算法对机械结构 进行优化,提高机械的性能和稳定性。
基于GA的系统性能优化案例
用于参数优化、模 型辨识等。
函数优化
用于求解多维、非 线性、离散或连续 函数的极值问题。
机器学习
用于分类、聚类、 特征选择等任务。
数据挖掘
用于关联规则挖掘 、聚类分析等。
03
CATALOGUE
系统辨识概述
系统辨识的基本概念
系统辨识
通过输入和输出数据,识别和估计系统的数 学模型的过程。
基于SIMULINK和GA的电力系统智能辨识法
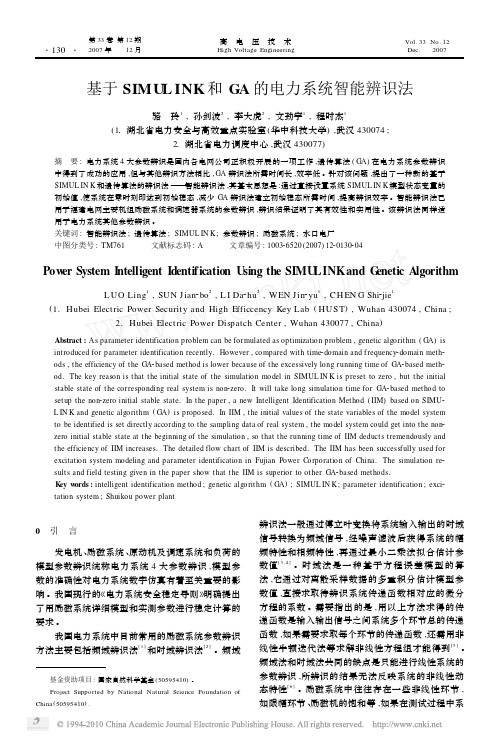
基于SIMU L INK 和GA 的电力系统智能辨识法骆 玲1,孙剑波2,李大虎2,文劲宇1,程时杰1(11湖北省电力安全与高效重点实验室(华中科技大学),武汉430074;21湖北省电力调度中心,武汉430077)摘 要:电力系统4大参数辨识是国内各电网公司正积极开展的一项工作,遗传算法(GA )在电力系统参数辨识中得到了成功的应用,但与其他辨识方法相比,GA 辨识法所需时间长,效率低。
针对该问题,提出了一种新的基于SIMUL IN K 和遗传算法的辨识法———智能辨识法,其基本思想是:通过直接设置系统SIMUL IN K 模型状态变量的初始值,使系统在零时刻即达到初始稳态,减少GA 辨识法建立初始稳态所需时间,提高辨识效率。
智能辨识法已用于福建电网主要机组励磁系统和调速器系统的参数辨识,辨识结果证明了其有效性和实用性。
该辨识法同样适用于电力系统其他参数辨识。
关键词:智能辨识法;遗传算法;SIMUL IN K;参数辨识;励磁系统;水口电厂中图分类号:TM761文献标志码:A 文章编号:100326520(2007)1220130204基金资助项目:国家自然科学基金(50595410)。
Project Supported by National Natural Science Foundation of China (50595410).Pow er System I ntelligent Identification U sing the SIMU LINKand G enetic A lgorithmL UO Ling 1,SUN Jian 2bo 2,L I Da 2hu 2,WEN Jin 2yu 1,CH EN G Shi 2jie 1(1.Hubei Elect ric Power Security and High Efficcency Key Lab (HU ST ),Wuhan 430074,China ;2.Hubei Electric Power Dispatch Center ,Wuhan 430077,China )Abstract :As parameter identification problem can be formulated as optimization problem ,genetic algorithm (GA )is introduced for parameter identification recently.However ,compared with time 2domain and f requency 2domain meth 2ods ,the efficiency of the GA 2based method is lower because of the excessively long running time of GA 2based meth 2od.The key reason is that the initial state of the simulation model in SIMUL IN K is preset to zero ,but the initial stable state of the corresponding real system is non 2zero.It will take long simulation time for GA 2based method to setup the non 2zero initial stable state.In the paper ,a new Intelligent Identification Method (IIM )based on SIMU 2L IN K and genetic algorithm (GA )is proposed.In IIM ,the initial values of the state variables of the model system to be identified is set directly according to the sampling data of real system ,the model system could get into the non 2zero initial stable state at the beginning of the simulation ,so that the running time of IIM deducts tremendously and the efficiency of IIM increases.The detailed flow chart of IIM is described.The IIM has been successfully used for excitation system modeling and parameter identification in Fujian Power Corporation of China.The simulation re 2sults and field testing given in the paper show that the IIM is superior to other GA 2based methods.K ey w ords :intelligent identification method ;genetic algorithm (GA );SIMUL IN K;parameter identification ;exci 2tation system ;Shuikou power plant0 引 言发电机、励磁系统、原动机及调速系统和负荷的模型参数辨识统称电力系统4大参数辨识,模型参数的准确性对电力系统数字仿真有着至关重要的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
待估计参数: ˆ [aˆ1, aˆ2 , bˆ1, bˆ2 ]T
10
辨识步骤:
(1)系统输入u(k) :循环周期Np 15的四阶M序列; (2)由u(k) 求仿真系统输出y(k) ,
(3)设待辨识的参数在[-2,+2]间,每一参数在GA空间用20-bit 编码,则
ˆ 对应的个体长度:
L 42080
aˆ2 0.3750023 a2 0.350
bˆ1 0.0360415 bˆ2 0.0246519
b1 0.036 b2 0.0255
绝对误差 0.0234753 0.0250023 0.0000415 0.0008481
相对误差 1.78% 7.14% 0.12% 3.32%
16
演示
GA与系统辨识
(2)在 GA 空间,个体位串表示的是系统参数估计的编码;
(3)确定位串长度
待辨识 (估计)的 m 个参数:
ˆ aˆ1, aˆ2 ,, aˆm T
① aˆi (i 1,2,, m )的范围由先验知识确定; ② ˆ 的长度 L 是各aˆi 在 GA 空间编码长度之和; ③ aˆi 精度由 L 确定(浮点编码除外),长度越长,精度越高。
yˆ
t jp
g{u
p
,
ˆ
t j
}g{up Nhomakorabea,
aˆ1t
j
aˆ
t 2
j
,
,
aˆ
t mj
}
系统输出与模型输出的误差:
eˆ
t jp
yp
yˆ
t jp
适应度函数取
f
(ˆ
t j
)
Q
Q
(eˆ
t jp
)
2
p 1
3
例5-6-1 GA用于静态非线性环节参数辨识。
环节结构已知,见图。由输入输出{u p , y p} , p 1,2,,Q ,对其参数 [a, b, k1, k2 ] 进行辨识,求得参数的估计ˆ [aˆ, bˆ, kˆ1, kˆ2 ] 。
(4)适应度函数
是 GA 用于指导搜索的惟一准则,选择适当的适应度函数以评价参数估计
的性能。
设第 t 代第 j(1 j n) 位串对应的参数估计为
ˆ
t j
aˆ1t
j
,
aˆ
t 2
j
,,
aˆmt j
T
2
辨识问题,适应度函数有两种形式:
① 动态系统辨识
模型输出:
yˆ
t j
(k)
g{u(k
),
ˆ
t j
8
演示
• 例5-6-1 GA用于静态非线性环节参数辨识
手控
9
例5-6-2 GA用于动态系统辨识。
仿真系统: P(s)
K
2
(T1s 1)(T2 s 1) (s 1)(20s 1)
采样周期 T 1s ,离散化后,可推导得 Z 传递函数:
P(z)
0.036 0.0255 z 1 1 1.319 z 1 0.35z 2
(5)本例是极小化问题,准则函数:
J
t j
1 2
Q
(yp
k 1
yˆ
t jp
)
2
1 2
Q
{e
t jp
}2
k 1
5
辨识结果见图 5-6-3、5-6-4 和表 5-6-1。 取 t=80 代的个体位串的译码值 f fmax 作为参数估计值。
图 5-6-3 每代最大、平均适应值
6
图5-4-6 参数优化过程
编码分辨率:
[2(2)]/(2201) 3.8106
(4)GA参数:(N,L,T, pm) (50,80,110,0.03)
交叉概率pc 自适应调整
GA操作:轮盘堵法+保留最优个体法选择; (5)适应值函数按动态系统辨识式选取。
11
辨识过程及结果: 采样一次数据遗传进化3代,经350代,辨识结果。见图5-6-5~5-6-7、
表5-6-2。
图5-6-5 输入输出数据
12
图5-6-6 每代最大、平均适应值
13
图5-6-7 参数优化过程
14
可见,辨识结果在低频段能较好的反映仿真系统的特性。
图5-6-8 仿真系统及辨识模型的波特图
15
表5-6-2 辨识结果估计值与参数值比较
辨识(估计)参数 参数
aˆ1 -1.3424753 a1 -1.319
7
表 5-6-1 辨识结果估计值与参数值比较(t=80 代)
辨识(估计)参数
aˆ 1.0000048 bˆ
2.0000744
kˆ1 0.9999361 kˆ2 0.5000272
环节参数
a
1.0
b 2.0 k1 1.0 k2
0.5
误差 0.0000048 0.0000744 0.0000639 0.0000272
}
g{u(k ),
aˆ1t j aˆ2t
j
,
,
aˆ
t mj
}
系统输出与模型输出的误差:
eˆ
t j
(
k
)
y(k)
yˆ
t j
(k
)
适应度函数取 ② 静态系统辨识
f
(ˆ
t j
)
q
q
(eˆ
t j
(k
i))2
i0
, qk
SISO 静态系统(或环节)输入/输出u p / y p ,p 1 ~ Q 。
模型输出:
z 1
系统采样输入输出{y(k) ,u(k) },则差分方程:
y(k ) 1.319y(k 1) 0.35y(k 2) 0.036u(k 1) 0.0255u(k 2)
离散化后,是具有一阶时延的系统。
系统参数: [a1, a2 , b1, b2 ]T [1.319,0.35,0.036,0.0255 ]T
0, y k1[u a sgn(u)], k2[u b sgn(u)] k1(b a) sgn(u),
u a a u b u a
图 5-6-2 非线性环节
4
辨识步骤:
(1)由u p 4 : 0.5 : 4 ,求环节之输出 y p , p 1,2,,17
(2)待辨识参数范围取[-4,4],每一参数在 GA 搜索空间用 20-bit 表示,则
ˆ 对应的个体长度:
L 20 4 80 (bit)
编码分辨率:
[4 (4)] /(220 1) 7.6 106 105
(3)GA 参数:( N , L, T , Pm ) (50,80,100,0.03)
交叉概率pc 自适应调整
GA 操作:轮盘堵法+保留最优个体法选择 (4)适应度选取按静态系统辨识式,Q 17 ,线性调整适应度;
• 例5-6-2 GA用于动态系统辨识
手控
17