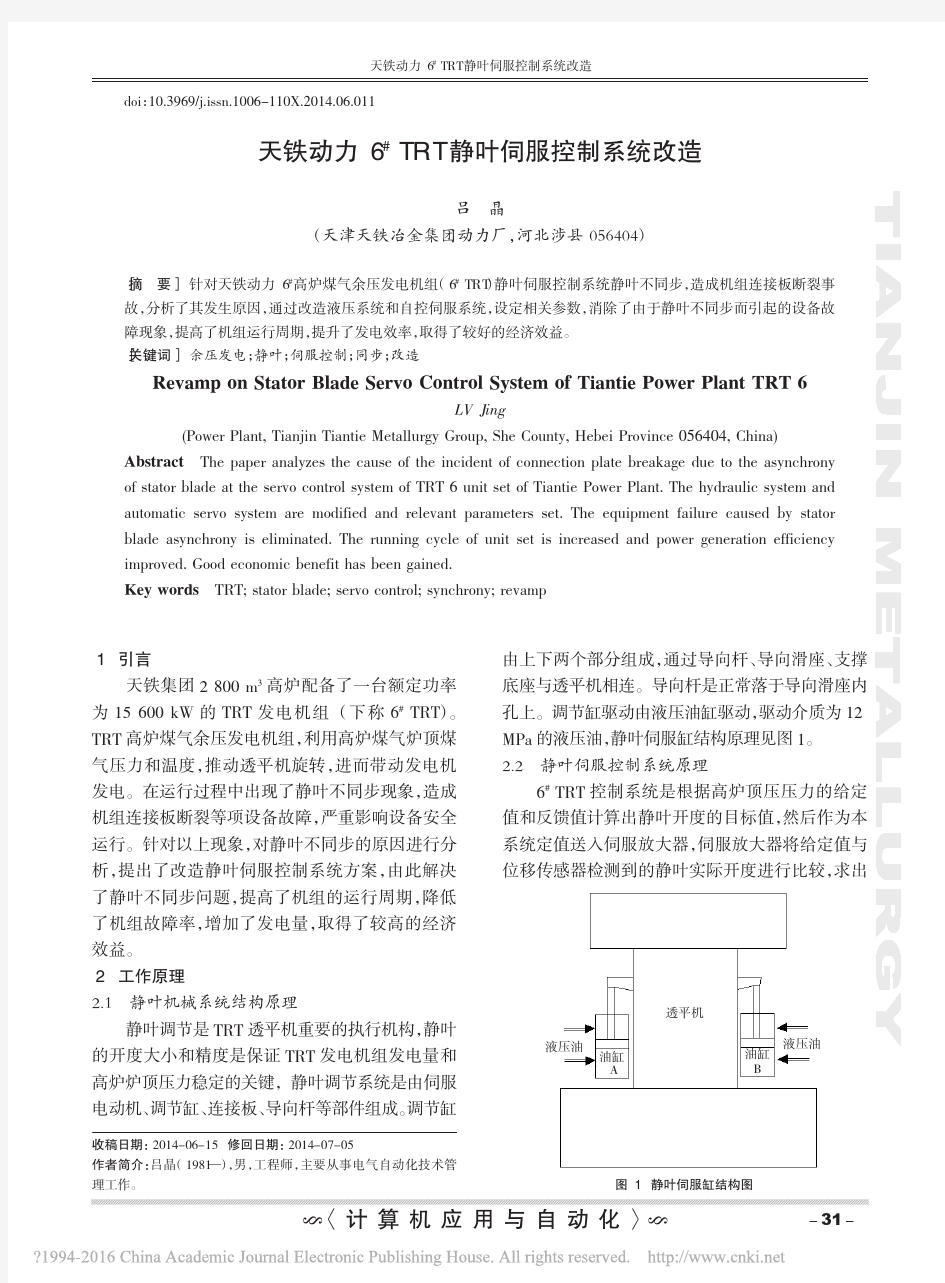
天铁动力6_TRT静叶伺服控制系统改造
AN系列静叶可调轴流式通风机使用说明书
目录 A 通风机 (4) 1 通风机说明 (4) 1.1 工作原理 (4) 1.2 一般设计 (4) 1.3 轴承 (6) 1.4 调节 (6) 1.5 空气动力运行条件 (7) 2 使用说明 (9) 2.1 通风机启动前的准备 (9) 2.2 通风机启动程序 (10) 2.3 通风机的并联运行 (10) 2.4 通风机运行时的监视 (11) 2.5 通风机停机 (11) 3 通风机维护 (12) 3.1 停机期间的维护工作 (12) 3.2 停机时的维护工作 (12) 4 润滑说明 (13) 4.1 主轴承 (13) 4.2 进口导叶调节装置 (14) 5 故障原因和检修 (15) 6 通风机部件的拆卸和装配 (16) 6.1 联轴器拆卸和装配 (16) 6.2 叶轮拆卸和装配 (16) 6.3 轴承拆卸和装配 (17) 6.4 可调前导叶拆卸和装配 (18) 6.5 后导叶拆卸和装卸 (19)
7 备件订货说明 (19) 8 一般说明 (19) 8.1 管路连接 (19) 8.1.1 进口和出口管路 (19) 8.2 运输 (20) 8.3 风机在现场工地安装前的存放 (21) 8.3.1 箱件的存放 (21) 8.3.2 大件的存放 (21) 9 工地安装 (21) 10 AN风机设定的整定值 (28) B 附件 联轴器装配说明 THYSSEN HENSCEL C 附图 剖面图 AN 系列轴流风机大件吊装顺序图 AN 系列轴流风机转动组装配示意图 AN 系列轴流风机转轴系找正原理示意图 机壳装配图(须现场封焊的大型剖分式机壳供此图) 拆卸装置 测温装置安装I
直流伺服电机调速系统(三闭环)要点
摘要 本设计以微型计算机8097为主控器,采用PID算法设计三环全数字式控制器。在本次设计中选择霍尔元件做为电流检测传感器,将检测到的弱电信号通过运算放大器LF356组成的两级放大电路放大滤波后,输入8097内部的A/D转换电路转换进而得到电流反馈量;光电脉冲发生器作为速度检测传感器以及位置传感器,通过光电隔离器PC900和GAL16V8的分频鉴相得到速反馈量,同时与8097内部的计数器和计数器8254结合以可逆计数方式得到位置反馈量;通过软件设置电流环、速度环和位置环的工作方式。此外,采用串口通信使伺服系统与上位微型计算机实现通信联系以发送各种运行指令,最终实现微型计算机对电流环、速度环和位置环的控制。 关键词:微型计算机,8097,HIS,8254,PID ABSTRACT This design adopts the micro-computer 8097 as the main component, and chooses the PID algorithm to design. Hall element as a current detection sensor will get weak signals in the design. Then the weak signals will be amplified and filtered through the amplifier circuit which constructed by LF356 , and imports 8097-internal A/D converter circuit to switch so that get the feedback signal of current .As speed detection sensors and position sensors, the optical pulse generator through the optical isolator PC900 and GAL16V8 to division frequency and phase in order to get the feedback signal of speed .Combined with the 8097 internal counter and the counter 8254 we can get feedback signal of position relying on reversible counting. In this design, we adopt software to set the operation mode of current loop, velocity loop and position loop work. In addition, we used the serial communication to set up the communications between system and upper monitor in order to send a variety of operating instructions, and ultimately system achieved control of the current loop, velocity loop and position loop. KEY WORDS:Microcomputer,8097,HIS,8254,PID
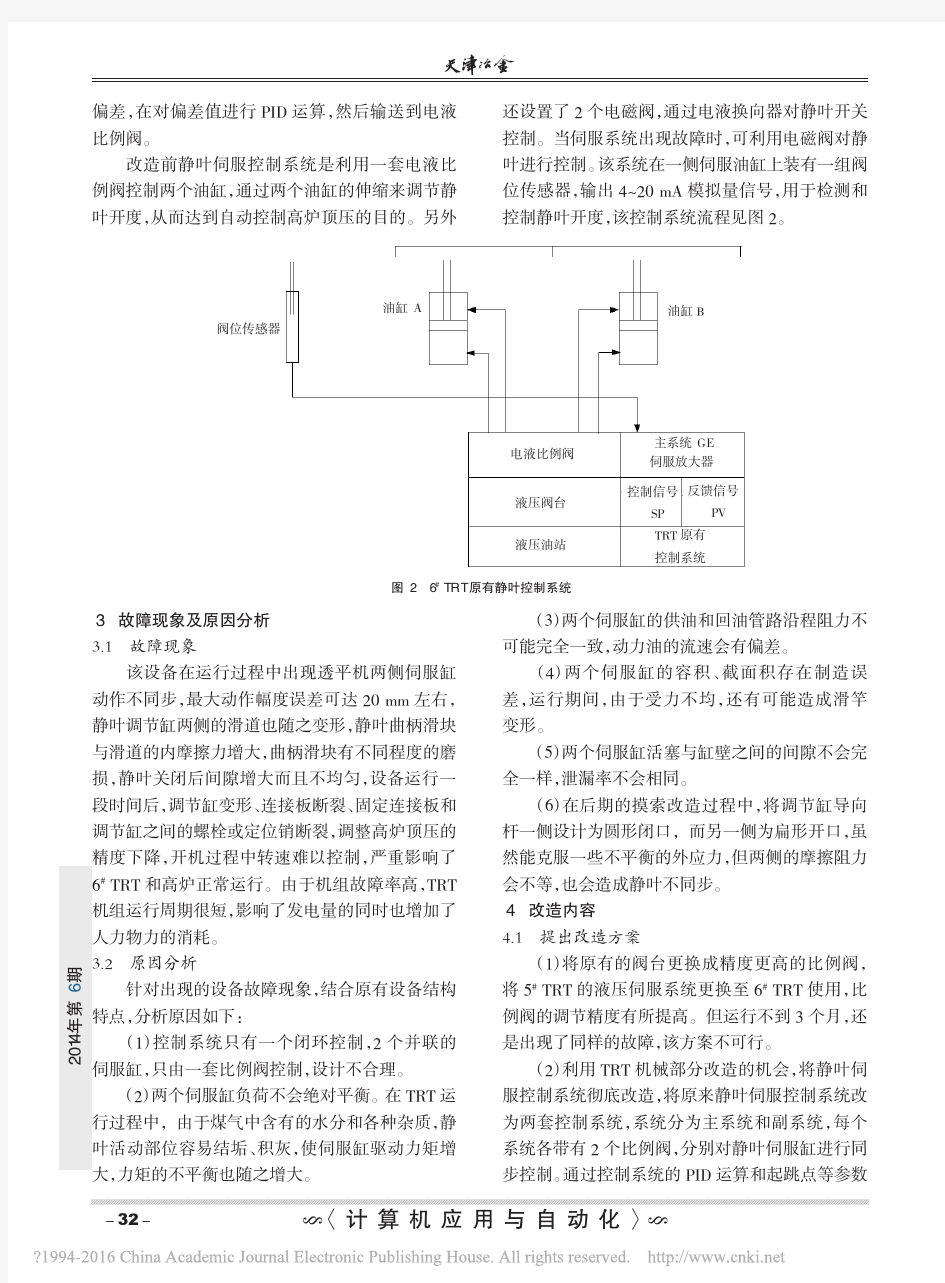
控制系统使用说明
控制系统使用说明 系统针对轴流风机而设计的控制系统, 系统分为上位监视及下位控制两部分 本操作为上位监控软件的使用说明: 1: 启动计算机: 按下计算机电源开关约2秒, 计算机启动指示灯点亮, 稍过大约20秒钟屏幕出现操作系统选择菜单, 通过键盘的“↑↓”键选择“windows NT 4.0”菜单,这时系统进入WINDOWS NT 4.0操作系统,进入系统的操作画面。 2:系统操作 系统共分:开机画面、停机画面、趋势画面、报警画面、主机流程画面、轴系监测画面、润滑油站画面、动力油站画面、运行工况画面、运行记录画面等十幅画面,下面就十幅画面的作用及操作进行说明 A、开机画面: 开机: 当风机开始运转前,需对各项条件进行检查,在本画面中主要对如下指标进行检查,红色为有效: 1、静叶关闭:静叶角度在14度
2、放空阀全开:放空阀指示为0% 3、润滑油压正常 4、润滑油温正常 5、动力油压正常 6、逆止阀全关 7、存储器复位:按下存储器复位按钮,即可复位,若复位不成 需查看停机画面。 8、试验开关复位:按下试验开关按钮即可,试验开关按钮在风 机启动后,将自动消失,同时试验开关也自动复位。 当以上条件达到时,按下“允许机组启动”按钮,这时机组允许启动指示变为红色,PLC机柜里的“1KA”继电器将导通。机组允许启动信号传到高压柜,等待电机启动。开始进行高压合闸操作,主电机运转,主电机运转稳定后,屏幕上主电机运行指示变红。这时静叶释放按钮变红,按下静叶释放按钮后,静叶从14度开到22度,静叶释放成功指示变红。 应继续观察风机已平稳运行后,按下自动操作按钮,启机过程结束。 B、停机画面: 停机是指极有可能对风机产生巨大危害的下列条件成立时,PLC 会让电机停止运转: 1、风机轴位移过大
直流伺服双闭环控制系统设计
直流伺服双闭环控制系统设计 1伺服系统介绍 1.1伺服系统的特征 伺服系统的功能是使输出快速而准确的复现给定,所以伺服系统具有稳定性好、精度高、动态响应快、抗干扰能力强等特点。同时还需要 (1)具备高精度的传感器,能准确地给出输出量的电信号 (2)功率放大器及控制系统都必须可逆 (3)足够大的调速围及足够强的低速带载性能 (4)快速的响应能力和较强的抗干扰能力 1.2伺服系统的组成及性能指标 伺服系统由伺服电动机、功率驱动器、控制器和传感器四大部分组成,除了位置传感器可能还需要电压、电流和速度传感器。 伺服系统的性能指标分为稳态性能指标和动态性能指标,两者之间既有区别又有联系。当系统达到稳定运行时,伺服系统实际位置与目标值之间的误差,称做系统的稳态跟踪误差。由系统结构和参数决定的稳态跟踪误差可分为三类:位置误差、速度误差和加速度误差。伺服系统在动态调节的过程中的性能指标称为动态性能指标,如超调量、跟随速度及跟随时间、调节时间、振荡次数、抗扰能力等。 1.3伺服系统控制对象的数学模型 根据伺服电动机的种类,伺服系统可分为直流和交流两大类。本次课程设计主要介绍直流伺服控制系统。 直流伺服系统的执行元件是直流伺服电动机,中小功率的伺服系统采用直流永磁式伺服电动机,当功率较大时,可以采用电励磁的直流伺服电动机,直流无刷电动机与直流电动机。其控制对象的数学模型将在后面具体介绍。
2.设计容介绍 直流调速是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。从机械特性上看,就是通过改变电动机的参数或外加工电压等方法来改变电动机的机械特性,从而改变电动机机械特性和工作特性机械特性的交点,使电动机的稳定运转速度发生变化。 直流调速系统中应用最普通的方案是转速、电流双闭环系统。转速负反馈环为外环,其作用是保证系统的稳速精度。电流负反馈环为环,其作用是实现电动机的转距控制,同时又能实现限流以及改善系统的动态性能。转速、电流双闭环直流调速系统在突加给定下的跟随性能、动态限流性能和抗扰动性能等,都比单闭环调速系统好。 速度与电流双闭环调速系统是20世纪60年代在国外出现的一种新型的调速系统。70 年代以来,在我国的冶金、机械、制造以及印染工业等领域得到日益广泛的应用。 随着电子技术、功率元件技术和高性能的磁性材料制造技术的发展,伺服控制直流电动机利用电子换向器取代了机械电刷和机械换向器。本次设计主要就是设计一个直流伺服双闭环的控制系统。 其基本结构图如下 图2-1双闭环伺服系统结构示意图
直流伺服系统的控制原理以及优缺点
本文主要介绍的是直流伺服系统的优缺点及控制原理,具体的跟随小编一起来了解一下。 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控 制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值) 的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与 调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。在很多情况下,伺服 系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作 用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),其结构组成和其他形 式的反馈控制系统没有原则上的区别。伺服系统最初用于国防军工如火炮的控制船舰、飞 机的自动驾驶导弹发射等后来逐渐推广到国民经济的许多部门如自动机床、无线跟踪控制等。 直流伺服系统的优缺点 1、优点 精确的速度控制 转矩速度特性很硬 原理简单、使用方便 价格优势 2、缺点 电刷换向 速度限制 附加阻力 产生磨损微粒(对于无尘室) 直流伺服系统原理框图
直流伺服系统的控制原理 直流伺服和交流伺服相似,可以采用控制器开环控制方式,控制器半闭环控制和全闭环控制系统。 直流伺服系统控制面板结构如下,面板右侧为与直流伺服电机接口板的接口,包括电机驱动接口和编码器接口;左侧为与运动控制器面板的接口,包括位置控制模式接口和速度控制模式接口。 M+,M-信号为直流无刷伺服电机的电源线,用于驱动电机的运动。 A+,A-,B+,B-,C+,C-,5+,0V信号为编码器信号,用于反馈电机轴的实际位置。 A,/A,B,/B,C,/C,+5V,PUL+,DIR+,OGND,OVCC,GND,DAC,RESET,ALM,ENABLE为与控制器相连的控制信号。 其含义为: A,/A,B,/B,C,/C为驱动器反馈给运动器控制器的编码器信号。 +5V为电源。
PLC控制伺服电机的方法
伺服电机的PLC控制方法 以松下Minas A4系列伺服驱动器为例,介绍PLC控制伺服电机的方法。伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置
控制模式控制信号接线图"连接导线 3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC 的输出端子)。 5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。 7(com+)与外接24V直流电源的正极相连。 29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。 上面所述的六根线连接完毕(电源、编
码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也
高炉轴流风机喘振分析及防喘振控制系统研究
高炉轴流风机喘振分析及防喘振控制系统研究 张红庆 陕西维远科技有限公司 710054 摘要:本文介绍了轴流风机喘振现象的形成机理、不同气温条件下喘振曲线的动态补偿方法,分析了常见的传统防喘振控制工艺中存在的不足,以及先进防喘振控制技术应用于高炉轴流风机的优化控制策略。 关键词:轴流鼓风机;防喘振;优化控制 引言 目前静叶可调式轴流风机在钢铁企业400~2000m3的高炉上已普遍使用。在高炉风机的控制系统中,防喘振控制系统是最核心的控制环节,必须综合考虑高炉生产、机组安全、节能降耗等多方面需求,如果在控制工艺中采用常规的简单、粗放的设计方法,不仅能耗浪费严重,也是极大的安全隐患。本文介绍的高精度防喘振控制系统,不仅可以更有效地保证机组和安全和稳定,同时也可以充份发挥机组的最大性能范围,对高炉安全性和产量的提高起到显著的促进作用。 轴流风机喘振现象的本质 为了更好地理解和设计防喘振控制系统,有必要对轴流压缩机形成发生喘振现象的本质原因加以说明。 轴流风机转子的叶片呈多级排列,每一级叶片环绕转子形成一组叶栅。空气流经过多级叶栅逐级压缩传递,最终经末级叶栅到达出口。在一定的静叶角度下,气体的流量与风机出口的压力有关,压力越高,流量越低。喘振是指风机达到出口压力极高、流量极低极限后的工况突变。
气流冲角及叶片背面表层气流脱离失速现象 气流沿轴向进入叶栅时,气流方向与风机叶片之间的夹角称为气流冲角。随着压力的增高,入口流量愈小,气流冲角也就愈大。当气流冲角增大到一定程度时,沿叶片的非工作面将发生气流脱离现象。这种现象称为脱流或失速。失速是叶轮式轴流输送设备都会遇到的一种现象,失速又叫旋转脱流,即由于气体对叶片的冲角过大而使得气流的流线脱离叶片表面,结果叶片表面处的气流变为紊流,同时可导致叶片颤振。失速区沿叶栅旋转传递和不断扩展,就会引起压缩机的工况突变,即喘振。 气流冲角增大至一定程度后,沿叶片背面形成气流脱离现象示意图 当风机发生喘振时,整个风机的管网系统气流周期性振荡现象,这时,轴流风机虽然仍在旋转,但对气体所做的功却不能提高风机的流量和压力,而是基本上转化为空气热能。风机的气动参数(流量、压力)将作大幅度的纵向脉动,且发出低沉的异常声音和震动。在轴流风机发生喘振时,纵向推力来回振荡会导致
伺服控制系统(设计)
第一章伺服系统概述 伺服系统是以机械参数为控制对象的自动控制系统。在伺服系统中,输出量能够自动、快速、准确地跟随输入量的变化,因此又称之为随动系统或自动跟踪系统。机械参数主要包括位移、角度、力、转矩、速度和加速度。 近年来,随着微电子技术、电力电子技术、计算机技术、现代控制技术、材料技术的快速发展以及电机制造工艺水平的逐步提高,伺服技术已迎来了新的发展机遇,伺服系统由传统的步进伺服、直流伺服发展到以永磁同步电机、感应电机为伺服电机的新一代交流伺服系统。 目前,伺服控制系统不仅在工农业生产以及日常生活中得到了广泛的应用,而且在许多高科技领域,如激光加工、机器人、数控机床、大规模集成电路制造、办公自动化设备、卫星姿态控制、雷达和各种军用武器随动系统、柔性制造系统以及自动化生产线等领域中的应用也迅速发展。 1.1伺服系统的基本概念 1.1.1伺服系统的定义 “伺服系统”是指执行机构按照控制信号的要求而动作,即控制信号到来之前,被控对象时静止不动的;接收到控制信号后,被控对象则按要求动作;控制信号消失之后,被控对象应自行停止。 伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵活方便的控制。
1.1.2伺服系统的组成 伺服系统是具有反馈的闭环自动控制系统。它由检测部分、误差放大部分、部分及被控对象组成。 1.1.3伺服系统性能的基本要求 1)精度高。伺服系统的精度是指输出量能复现出输入量的精确程度。 2)稳定性好。稳定是指系统在给定输入或外界干扰的作用下,能在短暂的调节过程后,达到新的或者恢复到原来的平衡状态。 3)快速响应。响应速度是伺服系统动态品质的重要指标,它反映了系统的跟踪精度。 4)调速范围宽。调速范围是指生产机械要求电机能提供的最高转速和最低转速之比。 5)低速大转矩。在伺服控制系统中,通常要求在低速时为恒转矩控制,电机能够提供较大的输出转矩;在高速时为恒功率控制,具有足够大的输出功率。 6)能够频繁的启动、制动以及正反转切换。 1.1.4 伺服系统的种类 伺服系统按照伺服驱动机的不同可分为电气式、液压式和气动式三种;按照功能的不同可分为计量伺服和功率伺服系统,模拟伺服和功率伺服系统,位置
直流伺服电机控制系统设计
电子信息与电气工程系课程设计报告 设计题目:直流伺服电机控制系统设计 系别:电子信息与电气工程系 年级专业: 学号: 学生姓名: 2006级自动化专业《计算机控制技术》课程设计任务书
摘要 随着集成电路技术的飞速发展,微控制器在伺服控制系统普遍应用,这种数字伺服系统的性能可以大大超过模拟伺服系统。数字伺服系统可以实现高精度的位置控制、速度跟踪,可以随意地改变控制方式。单片机和DSP在伺服电机控制中得到了广泛地应用,用单片机作为控制器的数字伺服控制系统,有体积小、可靠性高、经济性好等明显优点。。本设计研究的直流伺服电机控制系统即以单片机作为核心部件,主要是单片机为控制核心通过软硬件结合的方式对直流伺服电机转速实现开环控制。 对于伺服电机的闭环控制,采用PID控制,利用MATLAB软件对单位阶跃输入响应的PID 校正动态模拟仿真,研究PID控制作用以及PID各参数值对控制系统的影响,通过试凑法得到最佳PID参数。同时能更深度地掌握在自动控制领域应用极为广泛的MATLAB软件。 关键词:单片机直流伺服电机 PID MATLAB
目录 1.引言 ...................................................... 错误!未定义书签。2.单片机控制系统硬件组成.................................... 错误!未定义书签。 微控制器................................................ 错误!未定义书签。 DAC0808转换器.......................................... 错误!未定义书签。 运算放大器............................................... 错误!未定义书签。 按键输入和显示模块....................................... 错误!未定义书签。 按键输入............................................ 错误!未定义书签。 显示模块............................................ 错误!未定义书签。 直流伺服电动机.......................................... 错误!未定义书签。 3.单片机控制系统软件设计..................................... 错误!未定义书签。 主程序................................................... 错误!未定义书签。 键盘处理子程序........................................... 错误!未定义书签。 4.控制系统原理图及仿真....................................... 错误!未定义书签。 控制系统方框图........................................... 错误!未定义书签。 控制系统电路原理图....................................... 错误!未定义书签。 Proteus仿真结果........................................ 错误!未定义书签。组件对直流伺服控制系统的仿真................................. 错误!未定义书签。 MATLAB与Simulink简介.................................. 错误!未定义书签。 MATLAB简介......................................... 错误!未定义书签。 Simulink简介....................................... 错误!未定义书签。 直流伺服电机数学模型.................................... 错误!未定义书签。 系统Simulink模型及时域特性仿真......................... 错误!未定义书签。 开环系统Simulink模型及仿真......................... 错误!未定义书签。 单位负反馈系统Simulink模型及仿真................... 错误!未定义书签。 PID校正................................................ 错误!未定义书签。 PID参数的凑试法确定................................ 错误!未定义书签。 比例控制器校正...................................... 错误!未定义书签。 比例积分控制器校正.................................. 错误!未定义书签。 PID控制器校正...................................... 错误!未定义书签。6.小结...................................................... 错误!未定义书签。参考文献..................................................... 错误!未定义书签。附录 ........................................................ 错误!未定义书签。
伺服电机控制系统
伺服电机控制系统 对于数字化伺服电机控制系统,转矩环的性能直接影响着系统的控制效果,电流采样的精度和实时性很大程度上决定了系统的动、静态性能,精确的电流检测是提高系统控制精度、稳定性和快速性的重要环节,也是实现高性能闭环控制系统的关键。在伺服电机控制系统中,电流检测的方案有多种,常见的一种方案是使用霍耳传感器[1],将电流信号经过电磁转换,变换为直流电压信号输出,然后,通过运放和比较器构成的处理电路处理后,输入到处理器;另一种方案是,取采样电阻两端的电压,经线性光藕或者隔离放大器进行信号隔离,调理后接A/D转换器输入进行数字化,获取电流的采样值,而数字化的过程即可以利用处理器中的A/D转换通道实现[3] [4],也可以利用根据原理实现的模拟量直接转换为数字量的隔离调制芯片来实现[2]。本文通过对这三种方案分别进行电路设计和具体实验后所得结果的比较分析,对三种方案各自的特点有了清晰的认识,这有利于基于不同的条件选择合适的方案来提高伺服控制系统的整体性能。 2 伺服电机控制系统简介
本系统采用交直交电压型变频电路,主电路由整流电路、滤波电路及智能功率模块IPM逆变电路构成,控制部分以DSP 芯片TMS320LF2812为核心,CPLD作为辅助处理模块,构成功能齐全的全数字矢量控制系统,系统结构如图1所示,从图1可以看出,本系统是一个有电流、转速和位置负反馈的三闭环系统, DSP负责采样各相电流,计算电机的转速和位置,最后运用矢量控制算法,得到电压矢量PWM控制信号,经过光藕隔离电路后,驱动逆变器功率开关器件;同时DSP 还监控变频调速系统的运行状态,当系统出现短路、过流、过压、过热等故障时,DSP将封锁SVPWM信号,使电机停机,并通过LED显示。CPLD模块负责对光栅尺反馈的位置信息和上位机发送脉冲形式指令信息进行滤波和计数,并将数据以总线方式传送给DSP;同时处理键盘输入和显示输出,以及开关量的输入输出。 伺服电机控制系统中电流采样的作用就是检测交流同步 电动机的三相定子电流并转换成相应的信号输入到DSP中,再由DSP的AD模块转化成数字量进行处理。因为本文研究的是三相平衡系统Ia+Ib+Ic=0,因此只要检测其中的两路电流,就可以得到三相电流。
AN系列静叶可调轴流风机成都电力机械厂
A N系列静叶可调轴流风 机成都电力机械厂 The latest revision on November 22, 2020
AN系列静叶可调轴流风机(成都电力机械厂) AN系列静叶可调轴流风机(以下简称AN风机),其工作原理是介质沿着叶轮子午面的流道方向急剧收敛、加速,从而获得动能,并通过下游的后导叶和扩压器,使大部分动能转换成为静压能的轴流式通风机。 AN风机具有结构简单,安全可靠性高、耐磨性好、抗高温能力强等特点。是电厂、冶金、矿山、水泥等行业风机中最理想的选择之一,目前已有超过两千台AN 风机在世界各地运行,新技术的研发始终跟随用户需求的变化持续进行。 适用范围 AN风机安装形式分卧式和立式,特别适用于含有粉尘或腐蚀性的大流量气体,可在20-200oC度的高温度下运行。 AN风机可用作于: 1.发电机组的锅炉引风机。这也同样适用于增设烟气脱硫和脱硝系统而增加压力后的合并引风机。 2.发电机组烟气脱硫(FGD)及一氧化氮净化装置(DENOX)的增压风机。 3.在钢铁冶炼行业用于脱硫增压风机。 4.在铁矿烧结和制粒装置中作冷却、排气、除尘通风机。 5.在钢厂和铸造车间可用于排尘转换装置。
6.在水泥工业中可用作排烟和除尘用通风机。 7.还可用于需要处理或控制大流量空气、工艺用气或废气的所有其他场所。 为了精确地满足顾客所需要的工况参数,按照R40的数列等级,我们可以提供叶轮外径从1300至5000mm中若干 等级的风机供顾客选择。 在工程项目中,如果知道流体流量、密度和需要的全压,就可以推断出比压能。同时可以依据的比压能和流体流量的交叉点判断运行点是否落在AN风机范围内,即选择的风机是否合适。 性能特点和控制 AN系列风机的性能特性能够最大限度地满足用户的运行要求。当利用下面的图表确定叶轮直径和转速以后,将从我们的数据库中选择合理的变量组合(叶片数量、叶形、安装角,后导叶叶形及安装角等),从而保证AN风机的工作点在满负荷(100%)运行时,位于性能曲线图的最高效率区域内。 叶轮吸入流量的无级变化是通过旋转安装在叶轮上游的前导叶角度而精确实现的,这可以保证流体流量始终与不断变化的工况负荷相匹配。 大部分AN风机是在定转速下,采用前导叶进行调节的,前导叶角度调节范围非常广(-75o~30o),所以其性能足够覆盖用户所需的全部运行范围。
AN系列静叶可调轴流风机培训教材
AN系列静叶可调 轴流风机 培 训 教 材 CPMW 成都电力机械厂AN静叶可调轴流风机结构介绍
AN风机技术引进概况 AN系列静调轴流式通风机(简称:AN风机)是成都电力机械厂1987年从联邦德国KKK公司引进的专有技术、是由电力部根据我国电力工业的迫切需要向国家申报、经国家经委批准的技术引进项目,并被列为国家计委重大新产品项目。1990年成都电力机械厂用引进技术制造的AN静调轴流风机考核样机即国家重大新产品----大坝电厂300MW机组锅炉引风机投入运行,同年通过了德国专家的质量认证,在技术及制造质量上完全符合该公司的相关质量标准,并在1992年经中国电力工业部鉴定验收合格。该类型风机已被很多电厂的大型机组(特别是在引风机及增压风机上)采用,使用效果良好,在全国享有很高的声誉,并得到用户的高度赞赏,其业绩已近二千台。 AN静调轴流风机的名称、定义 A N 30 e 6 ( V 19 +4o) 安装角度 叶片数 V型叶片(等强度、固有频率高、压力系数高) 叶轮直径加6个机号得扩压器出口尺寸 德文eins(英文one)一种叶片 机号(R40系列) 非机翼型(板型no) 轴流风机(axial fan)
运行原理 能量转换过程: 电机叶轮、后导叶、扩压器 电能机械能(流体)静压能和动能 AN系列轴流通风机是一种以叶 轮子午面的流道,沿着流动方向 急剧收敛,通过叶轮的作功,气 流速度迅速增加,从而获得动能, 并通过后导叶将烟气的螺旋运动 转化为轴向运动而进入扩压器, 并在扩压器内将烟气的大部分动 能转化成系统所需的静压能的轴 流式通风机。根据其工作原理, 通称子午加速风机。
伺服电机驱动控制器
目录 一、伺服驱动概述 (1) 二、本产品特性 (2) 三、电路原理图及PCB版图 (4) 四、电路功能模块分析 (4) 五、焊接(附元件清单) (14) 六、编者设计体会 (16)
一.伺服驱动概述 1. 伺服电机的概念 伺服电机是在伺服系统中控制机械元件运转的发动机,作为一种执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器,直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。 2.伺服电机分类 普通直流伺服电动机 直流伺服电机 { 低惯量直流伺服电动机 直流力矩电动机 3. 控制系统对伺服电动机的基本要求 宽广的调速范围 机械特性和调节特性均为线性 无“自转”现象 快速响应 控制功率小、重量轻、体积小等。 4. 直流伺服电机的基本特性 (1)机械特性在输入的电枢电压Ua保持不变时,电机的转速n随电磁转矩M 变化而变化的规律,称直流电机的机械特性 (2)调节特性直流电机在一定的电磁转矩M(或负载转矩)下电机的稳态转速n随电枢的控制电压Ua变化而变化的规律,被称为直流电机的调节特性 (3)动态特性从原来的稳定状态到新的稳定状态,存在一个过渡过程,这就是直流电机的动态特性 5. 直流伺服电机的驱动原理 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。无刷直流伺服电机电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护不存在碳刷损耗的情况,效率很高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境
直流伺服电机控制系统
《电机与拖动》课程设计 直流伺服电机控制系统的设计 The design of Dc servo motor control system 学生姓名张志新 学院名称信电工程学院 专业名称电气工程及其自动化 指导教师韩成春 2012年01月04日
摘要 作为电能传输或信号传输的装置,变压器在电力系统和自动化控制系统中得到了广泛的应用,在国民经济的其他部门,作为特种电源或满足特殊的需要,变压器也发挥着重要的作用。变压器是通过电磁耦合关系传递电能的设备,用途可综述为:经济的输送电能、合理的分配电能、安全的使用电能。实际上,它在变压的同时还能改变电流,还可改变阻抗和相数。它的种类很多,容量小的只有几伏安,大的可达到数十万千伏安;电压低的只有几伏,高的可达几十万伏。 小型变压器指的是容量1000V.A以下的变压器。最简单的小型单相变压器由一个闭合的铁芯(构成磁路)和绕在铁芯上的两个匝数不同、彼此绝缘的绕组(构成电路)构成。这类变压器在生活中的应用非常广泛。 关键词电机与拖动;小型;单向;变压器
目录 1 绪论 (1) 1.1 设计总纲 (1) 1.1.1设计任务 (1) 1.1.2 设计要求 (1) 1.1.3设计用设备和器件 (1) 2变压器结构 (1) 2.1 铁芯 (1) 2.2 绕组 (1) 2.3 其他结构部件 (2) 3 变压器的工作原理 (2) 3.1 电压变换 (2) 3.2电流变换 (2) 4 设计内容及数据的测量 (3) 4.1 设计内容 (3) 4.2 铁芯尺寸的选定 (4) 4.3 绕组的匝数与导线直径 (5) 5 实例计算 (8) 结论 (10) 心得 (11) 参考文献 (12) 附录 (13) 附录1 (13) 附录2 (13)
直流无刷伺服电机运动控制系统设计
直流无刷伺服电机运动控制系统设计 Motionchip是一种性能优异的专用运动控制芯片,扩展容易,使用方便。本文基于该芯片设计了一款可用于直流有刷/无刷伺服电机的智能伺服驱动器,并将该驱动器运用到加氢反应器超声检测成像系统中,上位机通过485总线分别控制直流有刷电机和无刷电机,取得了很好的控制效果,满足了该系统的高精度要求。 在传统的电机伺服控制装置中,一般采用一个或多个单片机作为伺服控制的核心处理器。由于这种伺服控制器外围电路复杂,计算速度慢,从而导致控制效果不理想。近年来,许多新的电机控制算法被研究并运用于电机控制系统中,如矢量控制、直接转矩控制等。随着这些控制算法的日益复杂,必须具备高速运算能力的处理器才能实现实时计算和控制。为了适应这种需要,国外许多公司开发了控制电机专用的高档单片机和数字信号处理器(DSP)。现在,通常使用的伺服控制器的控制核心部分大都由DSP和大规模可编程逻辑器件组成,这种方案可以根据不同需要,灵活的设计出性能很好的专用伺服控制器,但是一般研制周期都比较长。 MotionChip的特点 MotionChip是瑞士Technosoft公司开发的一种高性能且易于使用的电机运动控制芯片,它是基于TMS320C240的DSP,外围设置了许多电机伺服控制专用的可编程配置管脚。TMS320C240是美国TI公司推出的电机控制专用16位定点数字信号处理器,其具有高速的运算能力和专为电机控制设计的外围接口电路。MotionChip很好的利用了该DSP的优点,并集成多种电机控制算法于一身,以简化用户设计难度为目的,设计成为一种新颖的电机专用控制芯片。MotionChip有着集成全部必要的配置功能在一块芯片的优点,它是一种为各种电机类型进行快速和低投入设计全数字、智能驱动器的理想核心处理器。具有如下特点: ?可用于控制5种电机类型:直流有刷/无刷电机、交流永磁同步电机、交流感应电机和步进电机,且易于嵌入到用户的硬件结构中; ?可以选择独立或主从方式工作,并可根据需要,设置成通过网络接口进行多伺服控制器协同工作; ?全数字控制环的实现,包括电流/转矩控制环、速度控制环、位置控制环; ?可实现各种命令结构:开环、转矩、速度、位置或外环控制,步进电机的微步进控制,并可实现控制结构的配置,其中包括交流矢量控制; ?可以配置使用各种运动和保护传感器(位置、速度、电流、转矩、电压、温度等); ?使用各种通讯接口,可以实现RS232/RS485通讯、CAN总线通讯; ?基于Windows95/98/2000/ME/NT/XP平台,强大功能的IPM Motion Studio 高级图形编程调试软件:可通过RS232快速设置,调整各参数与编程运动控制程序。其功能强大的运动语言包括:34种运动模式、判决、函数调用,事件驱动运动控制、中断。因此便于开发和使用。 ?可以通过动态链接库TMLlib,利用VC/VB实现PC机控制;也可以与Labview和PLC无缝连接,通过动态链接库,用户可以在上层开发电机的控制程序,研究控制策略。 运动控制系统设计
直流电机控制电路(伺服)
直流电机控制电路专辑—6 伺服电机是一种传统的电机。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。伺服电机的应用甚广,几乎所有的自动控制系统都需要用到。在家电产品中,例如录相机、激光唱机等都是不可缺少的重要组成部分。 1.简单伺服电机的工作原理 图22示出了伺服电机的最简单的应用。电位器RV1由伺服电机带动。电机可选用电流不超过700mA,电压为12~24V的任一种伺服电机。图中RV1和RV2是接成惠斯登(Wheatstone)电桥。集成电路LM378是双路4瓦功率放大器,也以桥接方式构成电机驱动差分放大器。当RV2的任意变化,都将破坏电桥的平衡,使RV1—RV2之间产生一差分电压,并且加以放大后送至电机。电机将转动,拖动电位器RV1到新的位置,使电桥重新达到新的平衡。所以说,RV1是跟踪了RV2的运动。 图23是用方块图形式,画出了测速传感器伺服电机系统,能用作唱机转盘精密速度控制的原理图。电机用传统的皮带机构驱动转盘。转盘的边缘,用等间隔反射条文图形结构。用光电测速计进行监视和检测。光电测速计的输出信号正比于转盘的转速。把光电测速计输出信号的相位和频率,与标准振荡器的相位和频率进行比较,用它的误差信号控制电机驱动电路。因此,转盘的转速就精确地保持在额定转速上。额定转速的换档,可由操作开关控制。
这些控制电路,已有厂家做成专用的集成电路 2.数字比例伺服电机 伺服电机的最好类型之一,是用数字比例遥控系统。实际上这些装置是由三部份组成:采用集成电路、伺服电机、减速齿轮盒电位器机构。图24是这种系统的方块图。电路的驱动输入,是用周期为15ms而脉冲宽度为1~2ms的脉冲信号驱动。输入脉冲的宽度,控制伺服机械输出的位置。例如:1ms脉宽,位置在最左边;1.5ms在中是位置,2ms在最右边的位置 每一个输入脉冲分三路同时传送。一路触发1.5ms脉宽的固定脉冲发生器。一路输入触发脉冲发生器,第三路送入脉宽比较电路。用齿轮盒输出至RV1,控制可变宽度的脉冲发生器。这三种脉冲同时送到脉宽比较器后,一路确定电机驱动电路的方向。另一路送给脉宽扩展器,以控制伺服电机的速度,使得RV1迅速驱动机械位置输出跟随输入脉宽的任何变化。 上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。 从图中可以看出是串行数据输入,经过译码器分出各路的控制信号。每一帧包含4ms 的同步脉冲,紧接在后面的是四路可变宽度(1~2ms)顺序的“路”脉冲。译码器将四路脉冲变换为并行形式,就能用于控制伺服电机。 3.数字伺服电机电路 数字伺服电机控制单元,可以买到现成的集成电路。例如ZN409CE或NE544N型伺服电机放大器集成电路。图26和图27示出了这两种集成电路的典型应用 。
伺服系统介绍.doc
一、相关概念 伺服系统(servomechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。伺服系统使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。 在机器人中,伺服驱动器控制电机的运转。驱动器采用速度环,位置环,电流环三环闭环电路,内部还设有错误检出和保护电路。驱动器通过通信连接器,控制连接器,编码连接器跟外部输入信号和输出信号相连。通信连接器主要用于跟电脑或控制器通信。控制连接器用于跟伺服控制器联接,驱动器所需的输入信号、输出信号、控制信号和一些方式选择信号都通过该控制连接器传输,它是驱动器最为关键的连接器。编码连接器跟电机编码器连接,用于接收编码器闭环反馈信号,即速度反馈和换向信号。 伺服电机主要用于驱动机器人的关节。关节越多,机器人的柔性和精准度越高,所需要使用的伺服电机的数量就越多。机器人对伺服电机的要求非常高,必须满足快速响应、高起动转矩、动转矩惯量比大、调速范围宽,要适应机器人的形体做到体积小、重量轻,还必须经受频繁的正反向和加减速运行等苛刻的条件,做到高可靠性和稳定性。伺服电机分为直流、交流和步进,工业机器人用的较多的是交流。 机器人用伺服电机
二、伺服系统的技术现状 2.1视觉伺服系统 随着机器人技术的迅猛发展,机器人承担的任务更加复杂多样,传统的检测手段往往面临着检测范围的局限性和检测手段的单一性.视觉伺服控制利用视觉信息作为反馈,对环境进行非接触式的测量,具有更大的信息量,提高了机器人系统的灵活性和精确性,在机器人控制中具有不可替代的作用。 视觉系统由图像获取和视觉处理两部分组成,图像的获取是利用相机模型将三维空间投影到二维图像空间的过程,而视觉处理则是利用获取的图像信息得到视觉反馈的过程。基本的相机模型主要包括针孔模型和球面投影模型,统一化模型是对球面模型的推广,将各种相机的图像映射到归一化的球面上。视觉伺服中的视觉反馈主要有基于位置、图像特征和多视图几何的方法。 其中,基于位置的方法将视觉系统动态隐含在了目标识别和定位中,从而简化了控制器的设计,但是一般需要已知目标物体的模型,且对图像噪声和相机标定误差较为敏感。基于图像特征的视觉反馈构造方法,其中基于特征点的方法在以往的视觉伺服中应用较为广泛,研究较为成熟,但是容易受到图像噪声和物体遮挡的影响,并且现有的特征提取方法在发生尺度和旋转变化时的重复性和精度都不是太好,在实际应用中存在较大的问题。因此,学者们提出了基于全局图像特征的视觉反馈方法,利用更多的图像信息对任务进行描述,从而增强视觉系统的鲁棒性,但是模型较为复杂,控制器的设计较为困难,且可能陷入局部极小点。目前针对这一类系统的控制器设计的研究还比较少,一般利用局部线性化模型进行控制,只能保证局部的稳定性。多视图几何描述了物体多幅图像之间的关系,间接反映了相机之间的几何关系。相比于基于图像特征的方法,多视图几何与笛卡尔空间的关系较为直接,简化了控制器的设计。常用的多视图几何包括单应性、对极几何以及三焦张量。 2.2伺服系统控制技术 现代的机器人伺服系统多采用交流伺服驱动系统,而且正在逐渐向数字化方向转变。数字控制技术已经五孔不入,如信号处理技术中的数字滤波、数字控制器,把功能更加强大的控制器芯片已经各种智能处理模块应用到工业机器人交流伺服系统中,可以实现更好的控制性能。 最近几十年,由于微电子技术的进步,各种方便用户开发的微控制器与数字信号处理器件大量涌现市场,为各种先进的智能控制算法在控制系统中的应用提供了可能。如今,各种新型的伺服控制策略大量涌现,大有与传统控制策略一较高低的趋势下面简单介绍几种: 1)矢量控制矢量控制技术的提出,为交流伺服驱动系统的快速进步提供了理论支持。矢量控制技术的主要原理为:以转子旋转磁场作为参考系,将电动机定子矢量电流经过两次坐标变换分解为直轴电流和交轴电流分量,且使两电流分量相互正交,同时对交直轴电流分量的