大型水压机的驱动系统和控制系统
2 总体方案的确定
2.1 设计任务分析
2.1.1 设计要求
某大型水压机的各种动作是通过以分配器为主体的液压机构实现的。开启分配器 的力很大, 是通过伺服系统驱动的。 设计一驱动系统及控制系统, 通过闭环反馈控制, 启闭分配器,实现水压机的控制。
主
要设计参数及设计要求: A 该题目要求我们设计某大型水压机的驱动系统和控制系统,通过闭环反馈控制,启 闭分配器,实现水压机的控制。由于水压机的分配器的实质是根据不同的工作过程 来开闭相应的阀来完成动作。而阀的开启是依靠一个翻板机构的转动来将其顶开, 是由阀芯的运动完成的。因此,设计的重点是设计一个分配器,以及电液伺服控制 系统。设计的控制系统,要实现分配器的动作的自动控制。在设计的控制系统中, 要用到检测装置得到的数据来控制分配器的动作,因此,设计的液压控制系统是一 个闭环控制系统。 综上所述, 该设计题目的完成需要解决以下几个主要的问题: 亲, 由于某些原因,没有上传完整的毕业设计(完整的应包括毕业设计说明 书、相关图纸CAD/PROE 中英文文献及翻译等),此文档也稍微删除了一 部分内容(目录及某些关键内容) 如需要的朋友,请联系我的 Q&Q:2215891151数万篇现成设计及另有的高端团队绝对可满足您的需
分配器规格: 600*300*420 (mm )
阀开启力: 15KN
开启曲线: 12.5 度推程 10.9mm 阀
数量: 4 个(通径) 驱动方式:液压驱动
PLC 控制
D .
2.1.2 任务分析
A.由于阀的开启所需的开启力比较大,因此阀的开启用什么来驱动?
B.分配器的具体结构的设计?
C.如何驱动分配器的动作,使之对应相应的控制信号?
D.系统要能实现自动操作,要有较高的控制精度和灵敏度,如何实现?
2.2总体方案的确定
221分配器的设计方案
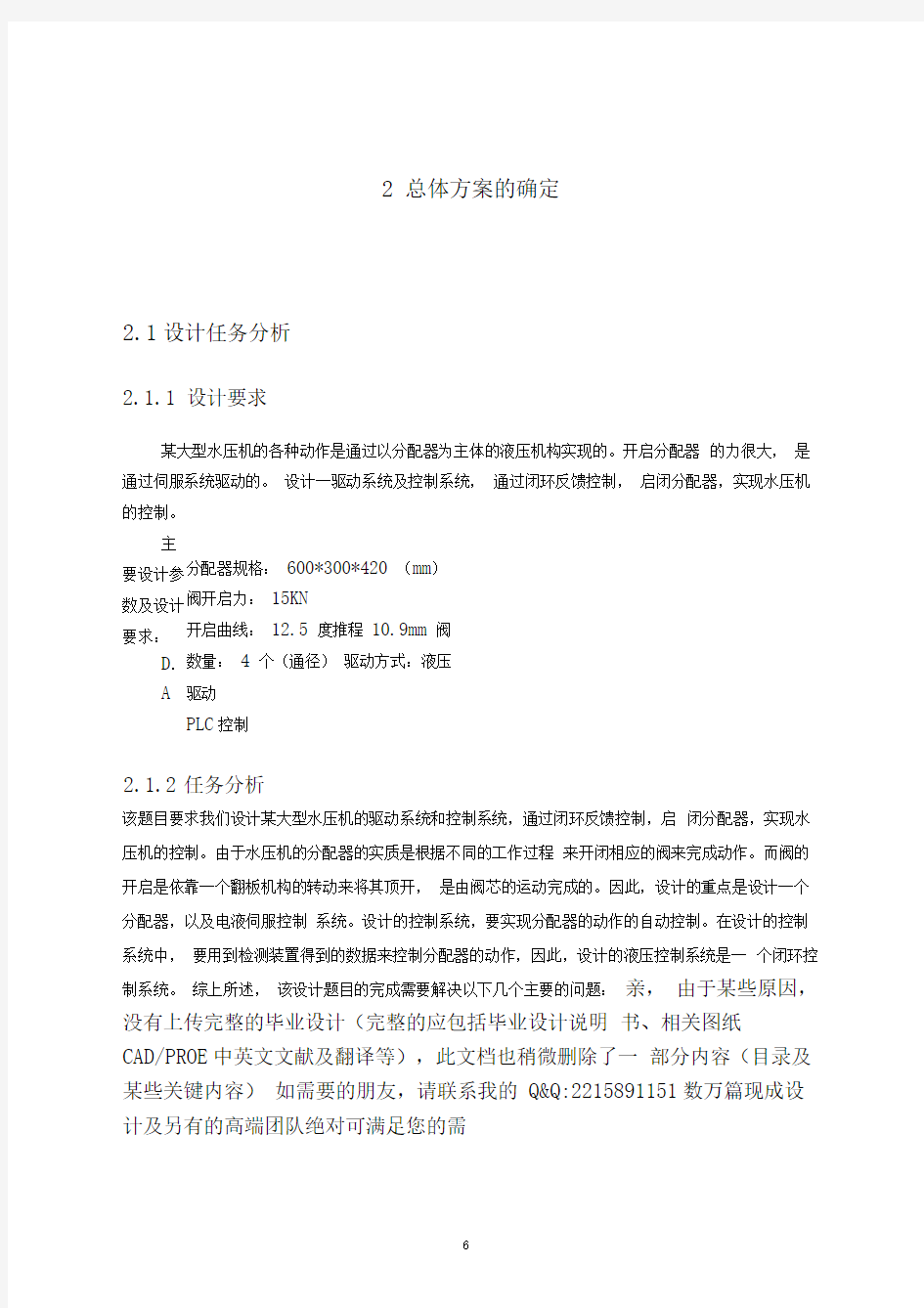
方案一:阀的开启采用机械系统来实现,如采用凸轮机构来驱动。基本的原理如图2.1 :在这个方案中,液压缸带动齿条做往复的直线运动,齿条和齿轮啮合传动将直线运动转换成圆周运动。齿轮固定安装在轴上,另外,4个凸轮也固定在该轴上。凸轮的转动就将分配器上的阀顶开,驱动阀的动作,这样就可以运用液压系统实现对水压机的操纵控制。在该轴的右端装备有一个单圈绝对型编码器(CVE10,用此
检测器来检测轴旋转过的角度,藉此来控制阀的开启程度。由于题目要求的凸轮的开启曲线为12.5度推程10.9mm需要凸轮旋转的角度不大,因此所选的检测器必须将数据准确,快速地传送出来。在该方案中,操作形式为电控形式,分配器的控制方式为“油控水”。
分配器
I I I I
[f
1.分配器
2.FHS 58 单圈绝对型编码器
3. 凸轮
4. 齿轮
图
6.
5. 齿条传动液压缸
2.1用凸轮驱动阀的分配器的原理简图
电磁换向阀
:IF
电磁换向阀
分配器
「:
BrS;
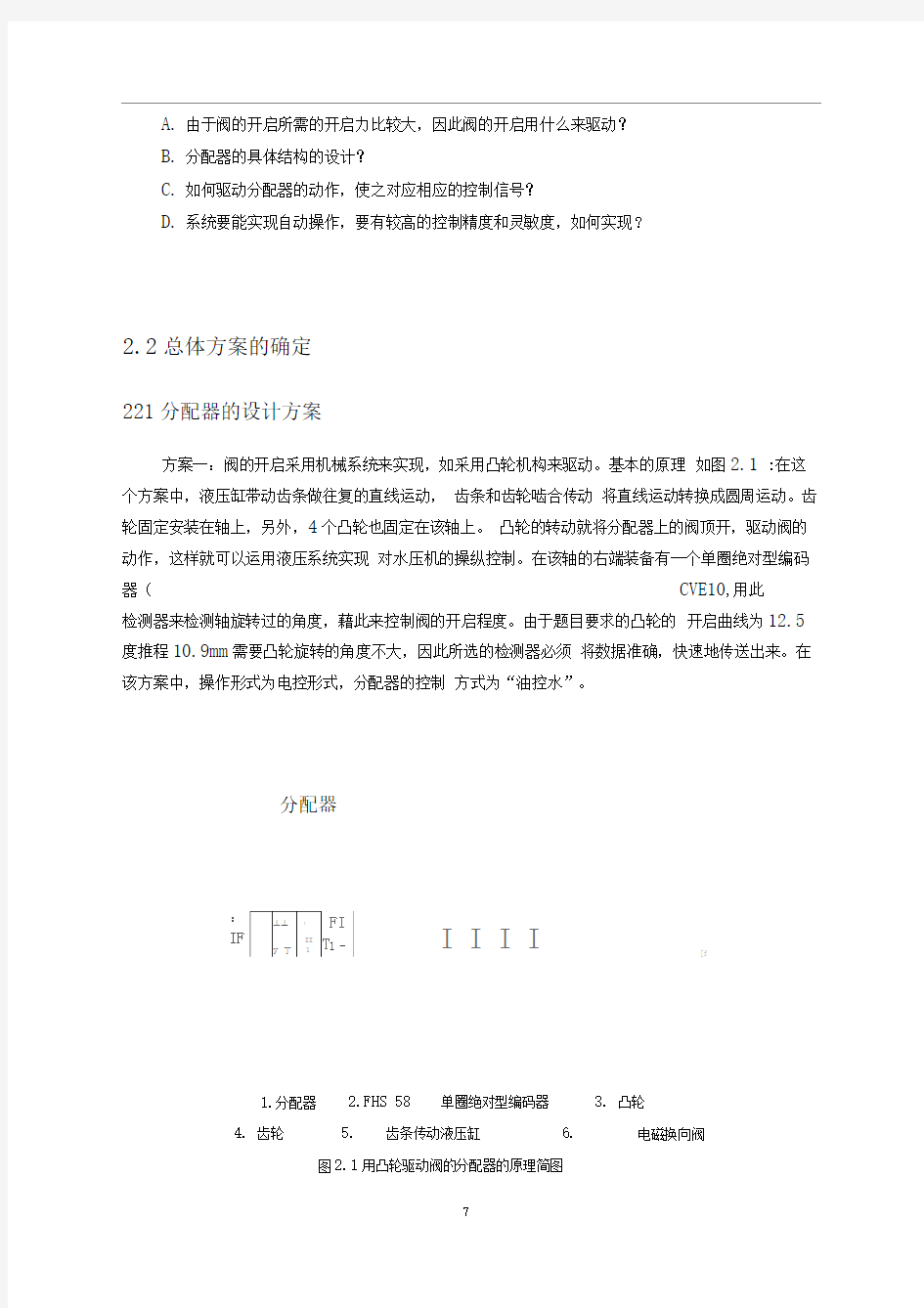
! i I_Lft 图22 用液压缸驱动阀的分配器的原理简图
图2.3强制联接的摇杆结构
2.2.2方案的比较和选择
摇杆式结构的优点是可以采用顶杆与转轴强制联接的结构(图 2.3 )。这种结构 可以使阀可靠地关闭,不致发生因密封和导套处的摩擦使得顶杆中途阻滞而发生阀 关不住的现象。它的缺点是早开的阀必须随晚开的阀继续开启,阀的开启不能任意 的控制。
凸轮式结构的优点是阀的开启曲线可以任意的控制,而且凸轮式结构传递的运 动比较平稳,可靠。在分配阀阀腔并列排列时,较摇杆式可获得较小的力臂长度。 如果采用摇杆式结构,为了减小力臂长度,就得将进液阀和排液阀呈交错排列,但 这种排列确造成了分配器长度的增加,并且力臂的长度也仍较凸轮式为大。
采用液压缸来驱动分配阀的启闭可以获得比较大的开启力,而且结构也比较的 简单。但是液压系
方案二:阀的开启采用液压系统来实现。
的开启由液压缸直接顶开。如图 2.2所示,
过液压系统来控制阀的动作。
方案三:阀的开启采用机械系统来实现。 基本的原理如图 2.2 :在该方案中,阀 每个阀的顶杆下方均有一个液压缸,通 用的控制机构为摇杆式机构。这种方案的基本原理如图
顶杆与转轴强制联接。这样同样也可以实现对分配阀的启闭控制。 跟方案一不同的是该方案的分配阀采
2.3所示:在这种方案中,
统的密封性要求比较高,一旦出现泄露问题,对分配阀的开启控制就会出错。它没有机械系统那样安全、可靠。
方案一中凸轮轴的转动依靠齿轮、齿条的啮合传动来实现,采用齿轮传动有其自身的优点:
1)效率高在常见的机械传动中,以齿轮传动的效率最高,这对大功率的机械传动来说十分的重要。
2)结构比较紧凑。
3)工作可靠,工作寿命比较长使用设计正确、合理,维护良好的齿轮机构,工作十分可靠,寿命可达一、二十年,这也是其它的机械系统所不能比拟的。
4)传动比稳定。
综上所述,由于液压系统没有机械系统可靠,而且摇杆式机构的力臂过大,因此选择第一种方案:分配阀的启闭用凸轮机构来驱动。因此,最终的方案就是,采用伺服油缸来作为执行机构,推动齿轮齿条机构,带动凸轮机构的转动来驱动分配阀的启闭。在凸轮轴的一端装备有检测装置来检测分配器的转动角度即油缸的位移,反馈给控制器实际的位置信号。整个系统是一个数字电液伺服系统。由操作台上操作手柄、按钮来发出控制信号。由可编程逻辑控制器(PLC来实现油压系统的控制, 从而驱动执行油缸,通过机械凸轮机构来实现分配阀的正确动作。
2.3设计内容分析
确定采用方案一,即采用机械机构来驱动分配阀的启闭和正常的动作。由于水压机的每一个动作都是通过不同的分配阀的启闭来实现的,因此在设计的第一个任务是设计分配器的机械结构。由于水压机在正常的工作中需要完成的动作比较多,因此一台大型的水压机必须要有若干个分配器来实现水压机的动作,由于题目的要求是设计某一个分配器,根据题目的要求,本次设计要设计的分配器上有四个分配阀,而且并没有确定要设计的是什么分配器,所以在设计的过程中,只要实现分配阀按照一定的规律打开、关闭就可以。假设每次打开两个分配阀,这样,凸轮机构的设计就比较的简单。另外没有要求分配阀打开时间的运动规律,所以凸轮的廓线就可以根据实际情况具体的设计,比较自主。
根据方案一,凸轮轴的转动采用齿条传动液压缸来驱动,因此本次设计的第二个主要任务是设计液压驱动、控制系统。要采用液压系统来驱动液压缸动作来带动凸轮机构的动作。并且要设计控制系统,要实现分配器的动作的自动控制。在设计的控制系统中,要用到检测装置得到的数据来控制分配器的动作,因此,设计的液压控制系统是一个闭环控制系统。设计的系统为一个数字电液伺服系统,
由操作台上操作手柄、按扭发出控制信号,由PLC实现油压系统的控制,从而驱动执行油缸, 通过凸轮机构,实现分配器的正确动作。
设计过程主要包括三个方面的内容:
1.确定总体方案。根据设计的要求及参考相关的资料,确定出整个设计的总体方案,并且要比较选优,选择最合适的方案。
2.驱动系统设计。主要设计凸轮机构、凸轮轴、支架以及齿条传动液压缸。还包括键的选择、校核;滚动轴承的选择、校核和挡圈的选择等内容。
3.液压系统、控制系统设计。液压系统主要是确定液压系统的基本原理图以及
选择各个液压元件的选择和计算。控制系统主要是PLC的选型和确定整个系统的控
制、操作系统框图。
1 绪论
1.1课题的来源和研究的意义
自上世纪50 年代以来,我国的液压技术取得了飞速的发展,就水压机来说,1961 年12 月,上海江南造船厂成功地建成国内第一台12000 吨水压机,这台水压机的制造成功,为中国重型机械工业填补了一项空白,也为我国的锻造事业跨进世界先进行列起了重要作用。它主要用于锻造有色金属合金的一般锻件和带孔的复杂锻件,特别是用于锻造航空航天工业需要的特殊加工部件,如飞机大梁、机翼龙骨、长征火箭和巡肮导弹的端环等。它也是锻造万吨巨轮发动机主轴、大型发电机转子轴、大型轧钢机架、炮管及导弹壳等不可缺少的设备。万吨水压机建成后,为国家电力、冶金、化学、机械和国防工业等部门锻造了大批特大型锻件;30 多年来,仍在正常运转,为社会主义建设作出了重大的贡献。本世纪60 年代以后,液压技术随着原子能、空间技术、计算机技术的发展而迅速发展。因此,液压传动真正的发展也只是近三四十年的事。当前液压技术正向迅速、高压、大功率、高效、低噪声、经久耐用、高度集成化的方向发展。同时,新型液压元件和液压系统的计算机辅助设计(CAD)、计算机辅助测试(CAT)、计算机直接控制(CDC)、机电一体化技术、可靠性技术等方面也是当前液压传动及控制技术发展和研究的方向。随着微电子技术和计算机技术的迅猛发展,传统的水压机不管是结构、功能、吨位、操作系统还是控制系统都显得比较陈旧和落后。比如结构过于复杂、工作的压力比较小、体积庞大。因此,现在研究水压机仍有十分重要的意义,尤其是对现有的水压机系统和结构进行改造十分必要。
1.2液压机的发展概况
液压传动相对于机械机械传动来说是一门新技术,但自从18 世纪末,英国制成世界上第一台水压机以来,液压技术已经发展了两百多年。直到20 世纪30 年代它
才较普遍地用于起重机、机床及工程机械。在第二次世界大战期间,由于战争需要,出现了由响应迅速、精度高的液压控制机构所装备的各种军事武器。第二次世界大战结束后,液压技术迅速转向民用工业,液压技术不断应用于各种自动机及自动生产线。1884 年在英国曼彻斯特首次使用了锻造钢锭用的锻造水压机,由于它与锻锤相比具有很多优点,因此发展很快,1893年建造了当时最大的
120MN勺锻造水压机。
随着航空工业的迅速发展,模锻液压机的公称压力不断提高。1934 年德国制造了70MN的模锻水压机,第二次世界大战期间,德国又制造了一台300MN勺模锻水压机。1955年左右,美国先后制造了二台315MN S二台450MN的大型模锻水压机。此外在英国、法国、联邦德国也都先后建造过200MN- 300MN的各种大型模锻液压机,而在法国安装的由苏联设计与制造的650MN莫锻液压机,则是西欧目前最大的一台。
由于液压机在工作中的广泛适应性,它还普遍应用于国民经济的各个部门,如板材成形,粉末冶金、管、线型材积压、胶合板压制、打包、人造金刚石、耐火砖压制、电缆包覆、炭极压制成形、轮轴压装、较直等等。各种类型的中小型液压机发展十分迅速,有力地促进了各种工业的发展。1949年以前,我国没有自己独立的工业体系,也根本没有液压机制造工业,只有一些修配用的小型液压机。1949年以后,我国迅速建立了自主的完整工业体系。我国已能自行设计和制造汽车、机车、发电设备、轧钢设备、飞机、火箭、人造卫星等产品,这些都促进各种液压机的发展。1957——1962年间,我国已开始自行设计、自行制造各种锻压设备,其中有近30台10000KN到31500KN 勺中型锻造水压机及二台120MN到125MN勺大型锻造水压机,同时,也初步建立了一支设计和制造液压机的技术队伍。
我国的液压技术开始于上世纪50年代,但是真正意义上的液压技术的发展开始于上世纪80年代。50 年代,我国自行设计制造了1000吨的水压机,这在当时,它对我国锻造工业起着积极的推动作用。因此,一个时期以来它成为我国工业战线的佼佼者。
80年代以来,液压机技术有了飞速发展,主要表现在以下几个方面:
1.迅速采用数控(NC及计算机控制(CNC技术,以实现工艺过程自动化及提高各运动部分的控制精度。例如中小型锻造液压机在逐步实现液压机及操作机联动的基础上可以采取计算机程序控制,在锻件高度方向的尺寸公差,已可控制在1mm 左右,目前,中小型快锻液压机已有取代老式蒸汽—空气自由锻锤的趋势。在中小型模锻液压机方面,采用微机辅助的检测控制系统,可以根据压力大小来补偿工作台、机架、滑块及模具等环节受载变形带来的误差,从而使滑快停止位置达到很高的精度.在液压板料折弯机中,采用计算机控制的自动弯曲补偿装置,可经常保持折弯机床身和上横梁之间的平行度,从而保证了3m长的薄板弯曲件沿弯曲线的角度偏差在0.5度。CNC?道弯管机可以存储一千多个程序段,可以知道弯曲不同弧度的管子,送进、夹紧、折弯自动化。可编程微处理机控制的知道矫正液压机,其控制块包括检测、计算和存储,在考虑毛坯原始弯曲程度、材料硬度性能等原始条件下,经过计算机运算,可得出优化的矫正过程。从一种矫正工件换到另一种所需辅助时间仅为几分钟。矫正过程中出现的问题可随时在屏幕上显示出来,以便于修正。
2.采用各种先进的快速滑阀或插装阀,减少阀的换向时间,使阀的响应时间减少到10ms以
施耐德2020笔试经验.doc
施耐德2020笔试经验 赶脚好少人,人气不旺的样子,发个施耐德的笔经来攒rp。 施耐德笔试补考,人少好多,笔试主要分成几个部分,按照顺序来是45分钟托业听力,45分钟行测,45分钟情景测试,和20分钟左右的性格测试or成功驱动力测试。 托业听力总的来说还比较简单,个人感觉比今年10月27号的托业考试简单一些。 45分钟行测还是比较赶,可以自由上下题,大家抓紧时间,建议可以先从后面的资料分析题做,拿分相对比较容易。 情景测试大部分就是和网上的题目相当,在一个情境下如何解决问题,思维方式,个人觉得考的是你是否想得周到,是否能把握事情解决的重点。 性格测试及成功驱动力测试个人觉得就是be yourself,如果为了迎合企业而选了和自己不相符的,估计进到去之后也很痛苦的吧。毕竟在一个企业能有发展,是那些适合的人,以及对于企业文化认同的人。 2020-05-30 赶脚好少人,人气不旺的样子,发个施耐德的笔经来攒rp。 施耐德笔试补考,人少好多,笔试主要分成几个部分,按照顺序来是45分钟托业听力,45分钟行测,45分钟情景测试,和20分钟左右的性格测试or成功驱动力测试。 托业听力总的来说还比较简单,个人感觉比今年10月27号的托业
考试简单一些。 45分钟行测还是比较赶,可以自由上下题,大家抓紧时间,建议可以先从后面的资料分析题做,拿分相对比较容易。 情景测试大部分就是和网上的题目相当,在一个情境下如何解决问题,思维方式,个人觉得考的是你是否想得周到,是否能把握事情解决的重点。 性格测试及成功驱动力测试个人觉得就是be yourself,如果为了迎合企业而选了和自己不相符的,估计进到去之后也很痛苦的吧。毕竟在一个企业能有发展,是那些适合的人,以及对于企业文化认同的人。 2020-05-30 赶脚好少人,人气不旺的样子,发个施耐德的笔经来攒rp。 施耐德笔试补考,人少好多,笔试主要分成几个部分,按照顺序来是45分钟托业听力,45分钟行测,45分钟情景测试,和20分钟左右的性格测试or成功驱动力测试。 托业听力总的来说还比较简单,个人感觉比今年10月27号的托业考试简单一些。 45分钟行测还是比较赶,可以自由上下题,大家抓紧时间,建议可以先从后面的资料分析题做,拿分相对比较容易。 情景测试大部分就是和网上的题目相当,在一个情境下如何解决问题,思维方式,个人觉得考的是你是否想得周到,是否能把握事情解决的重点。
第13章 步进电动机传动控制系统
第13章步进电动机传动控制系统 教学内容 13.1 步进电动机 13.2 步进电动机的环形分配器 13.3 步进电动机的驱动电路 13.4 步进电动机的运行特性及选用中应注意的问题 教学安排 本章安排2个学时,采用多媒体授课。 知识点及其基本要求 1.掌握步进电动机步矩角和步进电动机转速的数学表达式及其物理意义; 2.掌握步进电动机的结构、运行特性及影响因素。 重点和难点 重点 掌握步进电动机的通电方式和主要性能指标。 难点 步进电动机的矩角特性和矩频特性。 教学设计 1.了解步进电动机的结构和工作原理,掌握步进电动机的通电方式和求解步距角与转速的公式。 步进电机是将电脉冲信号转变为角位移 或线位移的机电执行元件。在非超载的情况 下,电机的转速、停止的位置只取决于脉冲信 号的频率和脉冲数,而不受负载变化的影响, 即给电机加一个脉冲信号,电机则转过一个步 距角。 (1)步进电动机的结构 右图所示为一台三相反应式步进电动机的 结构示意图,定子有6个磁极,每两个相对 的磁极上绕有一相控制绕组。转子上装有四个 凸齿。 图13-1 步进电动机结构图 (2)步进电动机的基本工作原理 步进电机的工作原理同电磁铁的工作原理,磁通具有力图沿磁阻最小路径通过的特点。
图13-2 三相反应式步进电动机的工作原理图 通电顺序A-B-C-A,转子便按顺时针方向一步步转动。每换接一次,转子前进一个步距角。通电顺序改为A-C-B-A便可反向旋转。 (3)步进电机的通电方式 三相单三拍 通电顺序:A-B-C-A或A-C-B-A,步距角30度(齿距90度) 特点:每次只有一相控制绕组通电吸引转子,易引起在平衡位置振荡,稳定性差,绕组通电换极时易失步。 双三拍 通电顺序:AB-BC-CA-AB或反过来,步距角30度(齿距90度) 特点:始终有两相通电,感应力矩大,静态误差小,定位精度高,工作稳定,不易失步。 三相六拍 通电顺序:A-AB-B-BC-C-CA-A步,距角15度(齿距90度)或A-AB-B-BC-C-CA-A 特点:单、双相轮流通电,通电状态增加一倍、步距角减少一半,但具有双三拍的特点。 (4)小步距角步进电动机 步距角步进电机的一般要求:转子齿数Z必须满足当一相磁极下定子与转子齿数相对时,下一磁极下定子与转子齿的位置错开齿距的1/m,m为相数。
宝洁面试流程
宝洁面试流程 整个筛选过程有人称为“七彩虹”,算得细致一点的确是有七关要过。具体流程如下:网申(1、基本信息——2、成功驱动力测试——3、图形推理测试)——英语托业考试——一面——二面——RT笔试。下面我就详细说一下我经历的整个过程吧~ 一、网申 今年网申的截止时间是10月9日,我是分两次完成的,第一次10月2日,第二次10月6日。后来在论坛上看大家发的帖子,我表示很惭愧,因为对于这个网申我完全没有概念,更加不会像很多人一样去精心做准备,而且满屏幕的英文着实看得我心里发毛。 网申一共包括三个环节,就是基本信息的填写、成功驱动力测试以及图形推理测试。基本信息填写只要按照它给出的说明和实际情况填写就好,只是里面要求上传简历我抓了狂。那天网申之前我根本不知道需要上传英文简历,别说英文的,我连中文的都没有。本来想点击退出下次继续弄,结果弹出的窗口“威胁”我如果放弃了一年内不能再申请什么的,我这一身冷汗啊。。。于是从网上临时找了一些模板,翻了翻有关写简历的一些技巧和注意事项,然后就开始平生第一次写简历了。类似“团支部书记”、“团总支书记”、“诗文朗诵会”之类的东西翻译的我十分痛苦,抱着一本牛津高阶和网上低级的有道词典,总算是把这个简历给应付过去了。其间页面两次跳出来提醒,说我已经超过了75分钟,我只能点击延长时间。胡乱折腾了一个下午,算是把这个网申给混过去了,我因为急着去台湾小吃街扫荡,所以后面两个网申环节我就留到第二次再弄。 进行成功驱动力测试和图形推理测试是在我十一假期从泉州玩儿回来的当天晚上了。我从网上草草浏览了一下某位仁兄做题时弄的截屏,然后又上手做了几道图形推理,就乐呵呵地开始作答了。对于成功驱动力测试我做的时候觉得就是一个普通的心理测试,它什么标准咱也不清楚,所以怎么想的怎么答,完全没花心思。图形推理跟我小时候玩儿的智商测试题差不多,所以也还算顺手,除了一道是乱蒙的以外,其他应该都答上来了而且能确保正确。 我在10月11日收到了一封邮件,通知我通过了网上申请,可以参加托业英语笔试。好了,关于网申我大概有这些想要说的: 1、简历什么的,还是提前准备好。一直以为基本信息这一环节是不会刷人的,但后来才知道也有极个别会被pass掉,原因不明。我那个贴上去排版已经乱掉的英文简历能够通过,我觉得算是踩了狗屎运。为了避免排版乱掉,论坛上有人说要用txt格式,然后最好使用宝洁自己的简历模板,自选上传的部分,一般人都会传一封求职信。这些都是我后来对这件事儿开始上心的时候才知道的。再次感叹我的狗屎运。。。格式不对、求职信也没有。。。如果有下次,不敢这么胡折腾了。 2、成功驱动力测试有点儿神奇,据说有不少牛人稀里糊涂地死在这一关上。宝洁是按照什么标准筛选我自然是不知道,我当时就是按照一个普通的心理测试在做,完全凭借第一感觉。不过走到现在回头去看,觉得应该动点儿小脑筋,也许是有可能顺利搞定的。自我定位的题目,尽可能往前面选,能做到前10%千万别选15%,这时候完全不需要谦虚。至于那些像是心理测试的题目,都是围绕宝洁那几个考察核心来设置的,如果想投个机,围绕那个答就不会有问题。再具体我也说不出来。。。那时候我实在还没开始用脑子。。。网上有不少技巧,可以适当参考。 3、图形推理测试之前做一些题还是有必要的,做上一套基本就能摸清楚它的规律了。核心就是两大类,数量关系和图形转动。网上有88道题库,动手做一下就明白怎么回事儿了,一般人都能应付。我就不赘述了。 二、托业考试 从接到通知到正式考试满打满算也就是三天不到的时间,我有点儿抓狂,应该说我真正开始
电机驱动及控制模块
电机驱动及控制模块
3.3电机驱动及控制模块 331 电机特性 —小车前进的动力是通过直流电机来驱动的,直流电机是最早出现的电动机, 也是最早能实现调速的电动机。长期以来,直流电动机一直占据着调速控制的 统治地位。它具有良 图7主、从单片机小系统应用电路 好的线性调速特性,简单的控制性能, 较高的效率,优异的动态特性。系统 选用的大谷基础车的260马达作为驱动电机。其额定电压为 3-12V ,额定功率 0.02KW 额定转速 3000r/min 。 近年来,直流电动机的结构和控制方式都发生了很大变化, 随着计算机进入 控制领域,以及新型的电力电子功率元件的不断出现,使采用全控制型的开关 功率元件进行脉冲调制(Pulse Width Modulation 简称PWM 控制方式已经成 为主流,这种控制方式容易在单片机控制中实现。 BE yr CAPCAP 2+ CAP + CiP I * EP Z CAP b HT-OVTl rr-xrr: T-m TDU rae.-[tfi E-C'UTL 化UT2 H 山习4 F21TF 匸曲 ~IF P22 vcc P22 m 酯T KX1WXI Pi - ? TTCZ'JPJL Pl? YT 11 T m 電 XTALi P14 nffo/pss F13 D1TLJP3J P12 JP34 P1J PLD PA 回■! P 討TCAO PM 时 ow P 禹 PIO Vcc P]1 FOCUADQ P32 POL/ADL E>JJ ! Plfl Pt3(AD3 P]5 P 】6 f :^AD5 P17 P0*'AD6 PB7/AD7 RST Tmjpsi EX LVD^ fiZRST2 AL&FI 5 曲朗 卜⑷PJ 4 wwu TflrP34 ri 郴 PIT PM 廻p 北 F35 FiZiiP]! F24 F33 xrAi.3 P]3 j^TALL P.3L Pin tr 空【 时 LED T 级, 厂:1巧处4打"卜单怜机 VCC 鱼T Z? 1. P ■ ■ ?一 ■■ ■ ■ b w 1 ? 3 *?!>rr ? .1 L I I I I r —PF p p Lp
基于单片机的步进电机驱动控制系统的设计
基于单片机的步进电机驱动控制系统的设计 发表时间:2017-06-13T14:46:19.210Z 来源:《电力设备》2017年第6期作者:李广军[导读] 摘要:步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。 (天津松正电动汽车技术股份有限公司, 天津 300308) 摘要:步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。因此,研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。本设计是采用AT89C51单片机对步进电机的控制,利用单片机自身的定时中断,来达到对步进电机的连续调速进行分析,并采用优化合理的步进电机驱动电路,以实现将外围器件有机结合。 关键词:单片机,步进电机,控制系统 1 引言 步进电机作为一种优秀的动力给予设备可以说在当今社会的各个领域中无处不在。随着工业生产水平的不断发展,以步进电机作为控制核心的传动设备在工业控制等领域得到了广泛的应用,包含机器人、工业电子自动化设备、医疗器件、广告器材、计算机外部应用设备等领域,步进电机的影子无处不在。中国作为一个制造业大国,生产车间中的流水线是企业完成产品组装和产品加工的重要场所,而步进电机在流水线设备中起到的动力作用至今仍然无法替代。 本课题的研究思路即为:采用单片机作为控制核心,实现对步进电机的精确控制。并将这种控制系统应用在生产车间的流水线传动设备中,增加了该控制系统的实效性和操作性。同时,由于单片机的高速性和精确性使得系统的设计在大为简化的同时又能实现精确控制,且应用成本低廉,因此可广泛应用在各行各业领域中。 2 步进电机驱动控制系统框图 步进电机控制系统有着精确控制、运行稳定的特性,这一其他电机不能比拟的优势使得步进电机得到了广泛的应用。而一般对步进电机控制系统的驱动必须要包含脉冲信号发生部分,功放部分和驱动控制部分等几个模块电路,我们根据这些通过的模块电路,可将步进电机控制系统的通用框图绘制如下: 在图2-1的步进电机驱动控制系统方框图中,控制步进电机运行状态的脉冲信号一般由集成芯片产生,可以是单片机、PLC等智能芯片,也可以是一般的数字电路集成芯片。信号分配环节则要根据步进电机的型号来选择,如四相步进电机有四相四拍和四相八拍2种信号分配的方式;两相步进电机有两相四拍和八拍等脉冲加载形式。功放部分在驱动环节上显得尤为重要。动态平均电流是步进电机转矩大小的决定因素,前提条件是电机的速度。电机力矩与平均电流成正比,驱动系统对电机的反电势消弱越多,则平均电流就越大。 我们一般可以用恒压和恒压串电阻的方法来驱动,或者在条件允许的情况下我们可以用高低压驱动、恒流和细分数等方法来驱动.实际的应用过程种,多采用数字集成驱动芯片作为步进电机的驱动手段。 由于步进电机是典型的脉冲控制运转设备,而8051系列单片机以其I/O口多,体积小,成本低廉,外围电路连接方便,可编程控制等综合优势越来越多的被引入到步进电机控制系统中使用,逐渐成为国内外控制步进电机的主流方式。本文所设计的步进电机驱动控制系统也是以8051单片机为核心的嵌入式开发控制系统。 3 步进电机驱动控制系统功能 基于单片机的步进电机驱动控制系统是一个实际应用与工业生产的系统。本设计在综合考虑系统设计等各方面因素后,明确该系统应具备如下功能: 硬件部分(1)单片机和步进电机运行所需的平稳电压;(2)液晶显示模块;(3)控制步进电机运行状态的键盘;(5)时钟电路与复位电路;(6)步进电机运行的驱动和功率放大电路设计;(7)用PROTEUS对整个系统进行硬件设计、仿真和对系统输出进行测试。 软件部分(1)系统复位初始化;(2)键盘扫描与处理;(3)液晶显示器初始化扫描程序;(4)定时器中断服务程序;(5)步进电机正转控制程序;(6)步进电机反转控制程序;(7)步进电机加速控制程序;(8)步进电机减速控制程序;(9)步进电机停转控制程序;(10)步进电机运行节拍控制程序。 4 步进电机驱动控制系统原理 本系统以AT89C51单片机作为核心,通过外部扩展其他硬件完成对步进电机运行状态的显示。AT89C51单片机有40个引脚,我们用P1 口的P1.0-P1.4引脚扩展步进电机运行状态控制键盘,设计完成后,包括停止、正转、反转、加速、减速一共五个按键。P0.0,P0. 1, P0.2,P0. 3四个引脚分别和与非门芯片7404的输入端相连用于扩展步进电机运行的驱动控制芯片-ULN2003A。P2口所有引脚和P3口的部分引脚用于外接AMPIRE128*64液晶显示模块。P2口连接AMPIRE128*64液晶显示模块的DB0-DB7,用于单片机和液晶显示模块的数据传输,P3. 2,P3. 4, P3. 5分别与AMPIRE128*64液晶显示模块的RS,R/W, E相连完成数据的显示,具体来说:。R/W为读写信号线,RS为数据指令选择端,E端为使能端子。在实际工作时,当R/W为低电平,E为信号下降沿时锁存DB0-DB7的数据;R/W为高电平,E为信号上升沿时,DDRAM的数据读到DB0-DB7中。P3.0,P3. 1分别与液晶显示模块的CS1 (左半屏片选端)和CS2 (右半屏片选端)相连用于对液晶模块的显示进行编程设置。 步进电机驱动控制部分采用专用芯片ULN2003A进行控制,其输出管脚1C一4C连接四相六线步进电机的相序控制端。COM端连接+12V 电源用于对其工作进行供电。当然IJLN2003A在接入单片机控制脉冲时必须连接限流电阻,。由于单片机和步进电机的供电电压分别是+5V 和+12V,因此本系统电源部分采用的是双电源供电电路,即釆用一套供电电路,分别输出+5V和+12V电压给系统供电。具体设计上采用从220V 市电引入交流电,通过变压器降压得到约15V的交流信号,再通过二极管进行桥式整流得到直流信号,通过滤波电路先与LM7812芯片相连得到+12V电压,再经过滤波处理与LM7805芯片相连得到+5V电压。在实际制作电源PCB电路板的时候,由于电源部分釆用双电源供电且含有较强的交流信号,干扰较大,考虑到步进电机控制系统的稳定性,因此对电源部分单独成板。
个人事业驱动力测试
个人事业驱动力测试 对每一大题中二小题依照个人倾向程度评分,倾向程度高分数亦高,但两项分数之和必须为“3” 情形一:A(3)B(0)A+B=3 情形二:A(2)B(1)A+B=3 情形三:A(1)B(2)A+B=3 情形二:A(0)B(3)A+B=3 试题: 1.A()我只满足预期高的生活标准。 B()我期盼对他人具有相当影响力。 2.C()只有当我的工作成果本身具备真正价值时,我才感到满足。 D()我希望对我做的事十分专业。 3.E()我希望在工作中运用创造能力。 F()与我喜欢的人共事对我特别重要 4.G()若能自由选择工作,我会十分满意。 H()我希望能十分确定我的经济安全。 5.I()我喜欢人们仰仗我的感觉。 A()坦白说,我希望很富有。 6.B()我盼望拥有一个具充分领导权的角色 C()我做对我有意义的工作,即使这工作可能没有物质回报。 7.D()我希望自己获得了一种难能可贵的专业技术。 E()我希望制造人们唯独与我来往的情形。 8.F()我在工作中寻求与人深切的社交关系。 G()自己决定如何支配时间,我就会得到满足。 9.A()除非拥有分组的物质,否则我不会满足。 D()我希望能证明我真的了解自己所学,这样我才满足。 10.C()我的工作是我追求生命意义的与部分。 E()我需要一些以我的名字为名字而制造的事物。 11.A()我希望买得起我想要的任何东西。 H()一个有长期安全的工作才真的吸引我。 12.B()我乞求一个能让我充分影响他人的角色。 D()在我的行业内做一个专家会使我很快乐 13.C()我的工作对社会有正面贡献,此点对我很重要。 F()在工作中与人关系亲密,对我很重要的。 14.E()我希望我的创造力能广为应用。 G()我希望做我自己的主人。 15.F()在工作中与人有亲密的关系会让我特别满足。 H()我希望能朝前展望我的生命,并且希望我对前途的顺利具有信心。 16.A()我期盼能够随便花钱。 E()我希望在工作中有真正的改革 17.B()老实说,我希望指点别人做什么 F()对我而言,与人亲密是真正重要的事。 18.C()我重视我的事业。把他当做追寻伟大生命意义的一部分。 G()我发现我想为我的决定负完全责任。 19.D()我乐于享受身为一个真正的专家之名。 H()我只有在一个安全的事业中才感到轻松。
步进电机 驱动器 控制器三者的关系
电机行业专业求职平台 1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况 下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机、交流电机在常规下使用。步进电机必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。它涉及到机械、电机、电子及计算机等许多专业知识。 提及此知识,希望能给予正在对电机选型的客户有所帮助。 2.力矩: 电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度,则产生力 F与(dФ/dθ)成正比 S 其磁通量Ф=Br*S Br为磁密,S为导磁面积 F与L*D*Br成正比 L为铁芯有效长度,D为转子直径 Br=N·I/R N·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。 力矩=力*半径 力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态) 因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。 一、混合式步进电机
电机行业专业求职平台1、特点: 混合式(又称感应子式步进电机)与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 混合式步进电机某种程度上可以看作是低速同步电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运 行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C= A ,D=B . 一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相, 而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,更可以作二相电机绕组串联或并联使用。 2、分类 混合式步进电机可分二相、三相、四相、五相等,我公司混合式步进电机以相数可分为:二相电机、三相电机: TEB20H,TEB28H,TEB35H,TEB39H,TEB42H,TEB57H,TEB86H,TEB110 H,TEC57H,TEC86H,TEC110H,TEC130H. 3、步进电机的静态指标术语 相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。 拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半 步)。 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
电机驱动系统效率优化控制技术研究现状
1.2 电机驱动系统效率优化控制技术研究现状 电动汽车的动力由电动机提供,电机驱动系统(简称驱动系统)的性能直接影响了电动汽车的性能。电动汽车系统需要能够满足频繁停车启动、加速、大负载爬坡以及紧急制动等要求,也需要考虑到汽车行驶路况复杂多变,存在雨天、酷热、下雪等恶劣天气,以及颠簸、泥泞等复杂路况。另外,在满足行驶条件的情况下还应最大限度地保证驾驶人员和乘坐人员的舒适安全。作为电动汽车的核心部分,驱动系统应满足宽调速范围、宽转矩输出范围、良好的加减速(起动、制动)性能、运行效率高(提高续航里程)以及高可靠性等要求。 针对永磁同步电机驱动系统的效率优化,总体来说可分为以下三个方向: 1)从电机本体的电磁设计、制造工艺以及电机的材料着手,开发高效电机。 2)改进脉宽调制(Pulse Width Modulation,PWM)技术,降低功率开关器件上的损耗从而提高逆变器的整体效率;降低变频器输出电压的谐波含量,如采取空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)技术和软开关技术,减小谐波含量从而提高驱动系统的整体效率。 3)研究合适的控制策略,在保证电机满足运行条件的情况下减小直流侧的功率输入,提高驱动系统的效率。 目前,针对永磁同步电机驱动系统效率优化所提出的控制策略很多,总体来说可以分为两大类:第一类是基于损耗模型的效率优化控制(Loss Model Control,LMC)策略;第二类是基于搜索法的效率优化控制(Search Control,SC)策略。下面分别进行概述。 1.2.1 基于损耗模型的效率优化控制策略 该控制策略作为一种基于前馈式的控制方法,基本原理是:在充分考虑电机各部分损耗的基础上,建立较为精确的损耗模型,根据电机运行状况(负载转矩和实际转速)计算出该运行状况下最优的控制变量(一般为磁场、电压或者电流)以减小驱动系统的损耗。若控制变量为电枢电流,对永磁电机驱动系统来讲一般选择最优的直轴电流i d和交轴电流i q,对混合励磁电机驱动系统来讲包括i d、i q以及励磁电流I f。这种控制策略目前已被广泛应用到了闭环传动系统中,可以保障电机驱动系统在全局运行范围内都能实现效优化。基于损耗模型的同步电机效率优化控制基本框图如图1.1所示。 基于损耗模型的驱动系统效率优化策略最早由T.M.Rowan和T.A.Lipo[1],以及H.G.Kim [2]等人提出并进行研究;1987年Bose[3][4]等人将该策略运用到永磁同步电机驱动系统中。美国学者X.Wei和R.D.Lorenz已将基于损耗模型控制策略结合直接转矩控制(Direct Torque Control,DTC)中,以提高永磁同步电机在瞬态过程中的效率[5]。针对同步电机而言,基于损耗模型的效率优化策略总共可以分为五种类型:考虑铁损的损耗模型控制策略[6][7]、考虑铜损的损耗模型控制策略[8][9]、考虑铁损和铜损的损耗模型控制策略[10][11]、基于电机精确损耗模型损耗模型控制策略[12][13]和约束条件下的损耗模型控制策略[14][15]。
步进电机在控制系统中的应用
步进电机在控制系统中的应用 摘要:步进系统无需反馈就形成了开环控制系统, 使系统结构大大简化、使用维护更加方便、工作可靠, 在一般使用场合具有足够高的精度等特点步进系统无需反馈就形成了开环控制系统, 使系统结构大 大简化、使用维护更加方便、工作可靠, 在一般使用场合具有足够高的精度等特点步进电动机有上述特点和优点而广泛应用在机械、治金、电力、纺织、电信、电子、仪表、化工、轻工、办公自动化设备、医疗、印刷以及航空航天、船舶、兵器、核工业等国防工业等领 一、步进电机工作原理 步进电机是将给定的电脉冲信号转变为角位移或线位移的开环 控制元件。给定一个电脉冲信号,步进电机转子就转过相应的角度,这个角度就称作该步进电机的步距角。连续给定脉冲信号,步进电机就可以连续运转。由于电脉冲信号与步进电机转角存在的这种线性关系,使得步进电机在速度控制、位置控制等方面得到了广泛的应用。 步进电机的使用至少需要三个方面的配合,一是电脉冲信号发生器,它按照给定的设置重复为步进电机输送电脉冲信号,这种信号大多数由可编程控制器或单片机来完成;二是驱动器(信号放大器),它除了对电脉冲信号进行放大、驱动步进电机转动以外,还可以通过它改善步进电机的使用性能;三是步进电机,它有多种控制原理和型号,现在常用的有反应式、感应子式、混合式等。 步进电机的速度控制是通过输入的脉冲频率快慢实现的。当发生脉冲的频率减小时,步进电机的速度就下降;反之,速度就加快。还
可以通过频率的改变而提高步进电机的速度或位置精度。步进电机的位置控制是靠给定的脉冲数量控制的。给定一个脉冲,转过一个步距角,当停止的位置确定以后,也就决定了步进电机需要给定的脉冲数。二,步进电机的应用 随着新材料、新技术的发展及电子技术和计算机的应用, 步进电动机及驱动器的研制和发展进入了新阶段。步进电机除了结构简单、使用维护方便、工作可靠, 在精度高等特点。还有下列优点: ①步距值不受各种干扰因素的影响。转子运动的速度主要取决于脉冲信号的频率。转子运动的总位移量则取决于总的脉冲信号数。②误差不积累。步进电动机每走一步所转过的角度与理论步距值之间总有一定的误差, 走任意步数以后, 也总有一定的误差。但每转一圈的累积误差为零, 所以步距的误差不积累。③控制性能好。起动、转向及其他任何运行方式的改变, 都在少数脉冲内完成。在一定的频率范围内运行时, 任何运行方式都不会丢一步的。 由于步进电动机有上述特点和优点而广泛应用在机械、治金、电力、纺织、电信、电子、仪表、化工、轻工、办公自动化设备、医疗、印刷以及航空航天、船舶、兵器、核工业等国防工业等领域。 1.步进电机在物料计量方面的应用 1.粉状物料的计量 螺杆计量是常用的容积式计量方式,它是通过螺杆旋转的圈数多少来达到计量的多少,为了达到计量大小可调和提高计量精度的目
电机驱动控制系统
电机驱动控制系统 摘要 由于单片机具有体积小、集成度高、运算速度快、运行可靠、应用灵活、价格低廉以及面向控制等特点,因此在工业控制、数据采集、智能仪器仪表、智能化设备和各种家用电器等领域得到广泛的应用,而且发展非常迅猛。随着单片机应用技术水平不断提高,目前单片机的应用领域已经遍及几乎所有的领域。 与交流电动机相比,直流电机结构复杂、成本高、运行维护困难,但是直流电机具有良好的调速性能、较大的启动转矩和过载能力强等许多优点,因此在许多行业仍大量应用。近年来,直流电动机的机构和控制方式都发生了很大的变化。随着计算机进入控制领域以及新型的电力电子功率元器件的不断出现,采用全控型的开关功率元件进行脉宽调制(Pulse Width Modulation,简称PWM)已成为直流电机新的调速方式。这种调速方法具有开关频率高、低速运行稳定、动态性能良好、效率高等优点,更重要的是这种控速方式很容易在单片机控制系统中实现,因此具有很好的发展前景。 本设计为单片机控制直流电机,以AT89C51单片机为核心,采用了PWM技术对电机进行控制,通过对占空比的计算达到精确调速的目的。由键盘控制电动机执行启停、速度和方向等各种功能,用红外对管测量电机的实际转速,并通过1602液晶显示出控制效果。设计上,键盘输入采用阵列式输入,用4*4的矩阵键盘形式,这样可以有效的减少对单片机I/O口的占用。
关键词:AT89C51 PWM 电机测速 一、硬件设计 1、总体设计
20 929303456781011121314151617318RFB 91112 10k 23
1918 2122232425262728 1.2.2 1602液晶显示模块 本模块实现了转速等显示功能。 D :方向;占空比;预设转速;实测速度; 1.2.3键盘模块 根据实验要求,需由按键完成对直流电机的控制功能,并经分 析得出需要16个按键,为节省I/O 口并配合软件设计,此模块使用了4*4的矩阵模式。并通过P1口与主机相连。 1.2.4 PWM 驱动电路模块设计与比较
评估知识测试题大全
评估知识测试题大全 评估知识测试题 本测试题为“人格驱动力测试”,完成测试后您能够理解您在为人处世,待人接物,工作人际,家庭育儿、婚姻恋爱、管理销售等等各个领域中无法理解的情况;帮助您更加容易知己知彼! 性格评估测试题(请凭第一印象选择,完成后统计A/B/C/D各有几个) 说明:从下列选项中选择一个最能准确描述现在大多数情况下的状态,单项选择。 1.听取意见时: A.坚持己见 B.因势利导 C.独具匠心 D.投其所好 2.工作中: A.享受成就 B.追求完美 C.按部就班 D.展示魅力 3.待人接物中: A.王者风范 B.从容内敛 C.宽容淡然 D.热情洋溢 4.做出抉择时 A. 目标至上 B.深思熟虑 C.举棋不定 D.简单直接 5.朋友眼中的自己 A.果决 B.可靠 C.知足 D.活跃 6.家人眼中的自己 A.傲慢无理 B.谨小慎微 C.漠然执拗 D.反复无常
7上司眼中 A.自信 B.稳重 C.善良 D.主动 8.面对失败时,他人眼中的自己: A.争强好胜 B.查找缘由 C.坦然接受 D.变换途径 9.面对失败时,自己内心的第一感受 A.愤怒责怪 B.沮丧自责 C.被动无奈 D.情绪失控 10.处理具体事务时,你希望 A.立即行动 B.理清思路 C.平和耐心 D.发挥特长 11.在人群中,你常常: A.敏锐地发现并指出别人的问题 B.敏感地感受他人的态度,并得体应对 C.安静地做一个好听众 D.欢快地成为气氛活跃者 12.面对伤害 A.苛责反击 B.耿耿于怀 C.茫然无措 D.软弱逃避 13.为达成目标: A.全力以赴 B.掌控细节 C.尽力而为 D.追求效率 14.对待亲人,容易犯的错误 A.不耐烦 B.爱掌控 C.太被动 D.易冲动 15.与人交谈时,你会: A.乐于表达,力争说服,
驱动电机系统简介
随着技术的不断进步,加上国家政策的大力扶持,新能源汽车已经成为了诸多汽车族的首选。相比传统汽车,新能源汽车具有环保、节能、简单三大优势,以电动机代替燃油机,由电机驱动而非自动变速箱。下面就给大家介绍一下新能源汽车的驱动电机系统。 传统的内燃机能高效产生转矩时的转速限制在一个窄的范围内,这就是为何传统内燃机汽车需要庞大而复杂的变速机构的原因;而电动机可以在相当宽广的速度范围内高效产生转矩,在纯电动车行驶过程中不需要换挡变速装置,操纵方便容易,噪音低。 与混合动力汽车相比,纯电动车使用单一电能源,电控系统大大减少了汽车内部机械传动系统,结构更简化,也降低了机械部件摩擦导致的能量损耗及噪音,节省了汽车内部空间、重量。电机驱动控制系统是新能源汽车车辆行使中的主要执行结构,驱动电机及其控制系统是新能源汽车的核心部件(电池、电机、电控)之一,其驱动特性决定了汽车行驶的主要性能指标,它是电动汽车的重要部件。
电动汽车中的燃料电池汽车FCV、混合动力汽车HEV和纯电动汽车EV三大类都要用电动机来驱动车轮行驶,选择合适的电动机是提高各类电动汽车性价比的重要因素,因此研发或完善能同时满足车辆行驶过程中的各项性能要求,并具有坚固耐用、造价低、效能高等特点的电动机驱动方式显得极其重要。 驱动电机系统是新能源车三大核心部件之一。电机驱动控制系统是新能源汽车车辆行使中的主要执行结构,其驱动特性决定了汽车行驶的主要性能指标,它是电动汽车的重要部件。电动汽车的整个驱动系统包括电动机驱动系统与其机械传动机构两个部分。电机驱动系统主要由电动机、功率转换器、控制器、各种检测传感器以及电源等部分构成,结构如下图所示。 电动机驱动系统的基本组成框图 电动机一般要求具有电动、发电两项功能,按类型可选用直流、交流、永磁无刷或开关磁阻等几种电动机,如图3。功率转换器按所选电机类型,有DC/DC 功率变换器、DC/AC功率变换器等形式,其作用是按所选电动机驱动电流要求,将蓄电池的直流电转换为相应电压等级的直流、交流或脉冲电源。电机是应用电磁感应原理运行的旋转电磁机械,用于实现电能向机械能的转换。运行时从电系统吸收电功率,向机械系统输出机械功率。电机驱动系统主要由电机、控制器(逆变器)构成,驱动电机和电机控制器所占的成本之比约为1:1,根据设计原理
5竞争能力测试
竞争能力测试 竞争在我们这个以成功为导向的社会中客观存在并日益激烈。不管竞争的驱动力是否有碍健康,竞争较强的人在事业上还是更容易成功。竞争心较强的人往往能有效地影响他人,对自己的事业目标比较清楚。 本测试包括25个与行业、态度有关的陈述。请仔细阅读,看看和你的情况是否相符。每道题都有5个答案可供选择(A、B、C、D、E)不同的符合情况。选择一个和你的个性、情况最相符的答案,并把代码写在方格里。全部答完后,再根据记分方式算出总分。 A、完全不像我 B、不太像我 C、无所谓像不像我 D、很像我 E、完全像我 测试题: 1、我喜欢和大家一起工作,这样可以互相帮助,共同提高。 2、看到别人开好车,我就想买更好的,超过别人。 3、我总想比同事穿戴得更漂亮,更引人注目些。 4、看倒朋友比我成功,会激起我的雄心,加倍努力。 5、我并不拿自己和别人相比来衡量是不是成功。
6、我的家用电器是最高档名牌的。 7、有人向我提问时,我即使不懂也会装懂。 8、有人问我的婚姻等个人生活时,即使不好我也会说很满意。 9、运动只是好玩,输赢我一点都不在意。 10、我喜欢单打,不喜欢固体比赛,因为无法确定我的“队友”水平表现如何。 11、我常假想和比我强的人较量一番。 12、对于我了解的事,我最讨厌有人不懂装懂,在我面前自我卖弄。 13、我宁可默默无闻,也不愿牺牲太多个人的时间去变成“大明星” 14、我引以为荣的是,有个吸引众多同事的异性和我关系不同一般。 15、我讨厌听人说:“人总有所长,有所短,何必争来争去。” 16、我认为成功的人未必什么都强,所以没什么好比的。 17、如果能受到特别的赞许和认可,那么做一个工作狂是值得的。 18、即使周围的人都想极力表现,我也觉得做好本职工作就满意了。
伺服电机驱动控制器
目录 一、伺服驱动概述 (1) 二、本产品特性 (2) 三、电路原理图及PCB版图 (4) 四、电路功能模块分析 (4) 五、焊接(附元件清单) (14) 六、编者设计体会 (16)
一.伺服驱动概述 1. 伺服电机的概念 伺服电机是在伺服系统中控制机械元件运转的发动机,作为一种执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器,直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。 2.伺服电机分类 普通直流伺服电动机 直流伺服电机 { 低惯量直流伺服电动机 直流力矩电动机 3. 控制系统对伺服电动机的基本要求 宽广的调速范围 机械特性和调节特性均为线性 无“自转”现象 快速响应 控制功率小、重量轻、体积小等。 4. 直流伺服电机的基本特性 (1)机械特性在输入的电枢电压Ua保持不变时,电机的转速n随电磁转矩M 变化而变化的规律,称直流电机的机械特性 (2)调节特性直流电机在一定的电磁转矩M(或负载转矩)下电机的稳态转速n随电枢的控制电压Ua变化而变化的规律,被称为直流电机的调节特性 (3)动态特性从原来的稳定状态到新的稳定状态,存在一个过渡过程,这就是直流电机的动态特性 5. 直流伺服电机的驱动原理 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。无刷直流伺服电机电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护不存在碳刷损耗的情况,效率很高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境
(整理)丰田普锐斯电机及驱动控制系统解析.
丰田普锐斯电机及驱动控制系统解析 作为全球最成功的环保车型,丰田普锐斯(PRIUS)早已成为油电混合动力车型中的全球销量冠军,即使在我们的身边,也经常可以见到它们的身影。目前,在国内生产的丰田普锐斯(PRIUS)是采用丰田第二代混合动力系统,集发动机和电动机组合而成的并行混合动力车(图1)。 丰田第二代混合动力系统(THS-Ⅱ),可以根据车辆行驶状态,灵活地使用2 种动力源,并且弥补2种动力源之间不足之处,从而降低燃油消耗,减少有害气体排放,发挥车辆的最大动力。由于其THS-Ⅱ电机及驱动系统结构复杂,技术先进,本文将为大家详细介绍该系统的结构及基本原理,以帮助读者更进一步了解THS-Ⅱ系统。 一、THS-Ⅱ电机及驱动控制系统的特点 1.在电动机和发电机之间采用AC500V高压电路传输,可以极大地降低动力传输中电能损耗,高效地传输动力。 2.采用大功率电机输出,提高电机的利用率。当发动机工作效率低时,此系统可以将发动机停机,车辆依靠电机动力行驶。 3.极大地增加了减速和制动过程中的能量回收,提高能量的利用率。 二、THS-Ⅱ电机及驱动系统基本组成 1.HV蓄电池:由168个单格镍氢电瓶(1.2V×6个电瓶×28个模块)组成,额定电压DC20 1.6V,安装在车辆后备厢内。在车辆起步、加速和上坡时,HV蓄电池将电能提供给驱动电机。 2.混合动力变速驱动桥:混合动力变速驱动桥由发电机MG1、驱动电机MG2和行星齿轮组成(图2)。
3.变频器:由增压转换器、逆变整流器、直流转换器、空调变频器组成。 (1)增压转换器:将HV蓄电池DC201.6V电压增压到DC500V(反之从DC500V降压到DC201.6V)。 (2)逆变整流器:将DC500V转换成AC500V,给电动机MG2供电。反之将AC500V 转换成DC500V,经降压后,给HV蓄电池充电。 (3)直流转换器:将HV蓄电池DC201.6V降为DC12V,为车身电器供电,同时为备用蓄电池充电。 (4)空调变频器:将HV蓄电池DC201.6V转换成AC201.6V交流电为空调系统中电动变频压缩机供电。 4.HV控制ECU采用32位计算机,接收来自传感器和ECU(发动机ECU、HV蓄电池ECU、制动防滑控制ECU、电动转向ECU)信息。根据此信息,计算车辆所需的扭矩和功率,将计算结果发送给发动机ECU,变频器总成,蓄电池ECU和制动防滑控制ECU。 三、THS-Ⅱ系统电机(MG1、MG2)工作原理 交流伺服驱动系统中,应用的交流永磁驱动电机有两大类。一类称为无刷直流同步电动机(BDCM),另一类称为三相永磁同步电动机(PMSM),THS-Ⅱ系统的电机(MG1、MG2)属于BDCM类型的驱动电机。 BDCM用装有永磁体转子代替了有刷直流电动机的定子磁极。有刷直流电动机依靠机械换向器,将直流电流转换成近似梯形波的交流电流。而BDCM是将逆变器产生的方波交流电流直接输入电机定子绕组,省去了机械换向器和电刷。BDCM定子绕组中通
电机驱动控制系统
电机驱动控制系统 “安邦信”是中国变频器行业的一块老品牌,在技术上沉淀了二十几年,在产、学、研、市场应用的道路上积累深厚的经验。1992年3月在江苏徐州成立,1998年10月迁址深圳,更名为“深圳市安邦信电子有限公司”是第一批国家电子工业部20家变频器企业之一,专注于变频器的研发、生产和销售,快速为客户提供个性化的解决方案。 “安邦信”是国内少数同时生产高、中、低压变频器的企业,主要服务于装备制造业、节能环保、新能源三大领域,营销网络遍布全国。公司在国产品牌厂商中名列前茅,其中专用变频系列产品在多个细分行业处于业内首创或领先地位。 “安邦信”旗下的电机科技有限公司,具有30年多年专注工业电动机与汽车电机的研发、制造历史。拥有先进自动化生产线和专业检测设备,拥有资深的专业电机设计、工艺,工装设计工程师。 多年来,始终坚持“产品做精、市场做专”的经营方针。投重金搭建研发平台,精诚与多所院校建立研发联盟。获得了各种技术专利100多项,掌握了永磁同步、异步、电流开环、闭环矢量控制与485、CAN、PROFIBUS通讯的技术。完成了40V-1000V电压等级,0.4KW-8700KW功率等级产品供货能力。市场横跨电动汽车、工业控制两大行业领域,在电动汽车领域具有永磁电机、异步电机控制,40V-560V电压等级、1.5KW-250KW功率范围,风冷、水冷、油冷全系列的产品供应。当前生产的电动车电机有高效永磁同步电机,高效铜转子异步电机,高效鼠笼式异步电机三大系列。 “安邦信”制造基地根据公司的研发优势,大量采用自动化生产设备,生产设备及仪器业内领先,空间布局,生产线结构都依据国际标准设计,年产能超过15万台。 规范的流程,先进的设备,敬业的员工是安邦信制造体系的核心竞争力,严谨而人性化的生产管理实现了大规模生产效应。 电机驱动控制系统产品 “安邦信”针对市场的需求研发出电机驱动控制系统产品,形成一套驱控体系,为整车厂提供电机驱控系统解决方案,提高整车效率。其中72V,7.5KW和144V,15KW系列产品,经过市场验证,深受好评获得客户良好认可。 7.5KW和15KW电机驱动控制器系统,电机驱动控制系统具有高峰值转矩、高可靠性、低成本的特点。同时具有高效异步铜转子电机采用双冷技术,同步降低电机定转子温度,电机具有高效、高功率密度、