车流量检测技术综述
智能交通系统中的交通流量监测技术介绍
智能交通系统中的交通流量监测技术介绍智能交通系统是运用先进的信息技术和通信技术,对交通运输系统中的交通流量、交通事故、交通环境等进行监测、控制和管理的系统。
而交通流量监测技术是智能交通系统中的重要组成部分,它通过收集、处理和分析交通数据,为交通管理者和用户提供交通运行状态和交通状况的实时信息,从而能够有效提高交通管理水平和交通运输效率。
一、交通流量监测技术的意义智能交通系统中的交通流量监测技术在交通管理中具有重要意义。
首先,交通流量监测技术可以实现交通流量的实时监测。
通过采集道路上的交通数据,交通管理部门可以准确地了解交通流量的分布情况、速度和密度等信息,从而能够及时采取措施,对交通流量进行优化调度,保证交通流畅和道路安全。
其次,交通流量监测技术可以提供交通状况的实时信息。
交通数据的采集和处理可以实现对道路交通状况的实时分析和预测,将分析结果通过交通控制中心或者移动端展示给驾驶员和交通管理者,从而帮助他们了解交通拥堵情况,选择更合理的出行路线,提高整体交通效率。
最后,交通流量监测技术可以对交通事故进行监测和预警。
通过对交通数据的分析,可以实时监测到交通事故的发生情况和位置,并迅速提供救援信息,增加救援的响应速度,最大限度地减少交通事故造成的损失和伤亡。
二、交通流量监测技术的分类交通流量监测技术主要包括传统交通流量监测和智能交通流量监测两大类。
传统交通流量监测主要采用地面感应器、视频监测和车辆计数等手段进行数据的采集和处理。
其中,地面感应器主要通过地磁感应和微波感应等技术,实时监测车辆的通过时间和速度等信息;视频监测则通过安装在道路上的摄像头,获取交通流量的图像和视频,通过图像处理和车辆识别技术,实现车辆计数和交通状况的分析。
智能交通流量监测则采用更加先进的技术手段,如雷达、红外感应、激光扫描和无线通信等技术。
通过这些先进的传感器和通信技术,可以实现对交通流量的实时监测和分析,准确获取交通数据,并通过预测模型和算法,对交通状况进行预测和调度。
车流量检测.pdf
道路车辆检测技术概述近年来,随着我国交通运输事业的蓬勃发展,智能交通系统(ITS)的研究和应用越来越得到重视,交通运输部于2011年4月颁布了《公路水路交通运输信息化“十二五”发展规划》,提出“必须把推进交通运输信息化建设摆在‘十二五’规划中的突出位置”。
准确、实时、完整的交通信息采集是ITS的基础,而车辆检测器则是对动态交通信息进行实时采集的基础设施。
随着电子技术、通信技术和计算机技术的不断发展,车辆检测器也由过去比较单一的种类发展为采用不同技术手段,具有多类型、多品种、多系列的交通车辆参数检测器家族。
按信息采集方式的不同,可分为固定型检测技术和移动型检测技术。
固定型检测技术可分为磁频采集、波频采集和视频采集3类,主要有感应线圈检测器、磁力检测器、微波检测器、超声波检测器、红外线检测器和视频检测器等,目前我国道路监控系统中,使用最多的是感应线圈车辆检测器、视频车辆检测器和微波车辆检测器3种。
移动型检测技术目前主要有浮动车法、车辆识别法和探测车法等,运用的技术主要有基于GPS的定位采集技术、基于汽车牌照自动判别的采集技术、基于电子标签(Beacon)的定位采集技术和基于手机探测车的采集技术。
1磁频类车辆检测器磁频类车辆检测器是基于电磁感应原理的车辆检测器,主要有感应线圈检测器、磁性检测器和地磁检测器等,其中感应线圈检测器是目前使用最广泛的交通流量检测装置。
1.1感应线圈检测器感应线圈检测器是地埋型检测器,其传感器为一组通有一定工作电流的环形感应线圈。
当车辆进入环形感应线圈所形成的磁场时,引起电路中调谐电流的频率或相位变化,检测处理单元通过对频率或相位变化的响应,得出一个检测到车辆的输出信号。
感应线圈检测器可直接提供车辆出现、车辆通过、车辆计数及车道占有率等交通流信息。
调查表明,用2m×2m的标准感应线圈对交通流量进行检测,其精度可达到98%~99%。
通常在同一车道内埋设2个感应线圈,根据测定车辆通过前后线圈的脉冲响应时间差,计算距离/时间就可测出车速。
智慧城市交通系列之车流量检测(一)
智慧城市交通系列之车流量检测(⼀)序⾔车流量在⽬前的交通系统中应该是⾮常普遍的,可以⽤于统计某条⼲道的车辆经过总数,与⼈流检测实现原理⼏乎是⼀样的,都是基于⽬标检测和跟踪进⾏,本例的实现是基于yolov5+deepsort,使⽤yolov5对车辆进⾏检测,再⽤deepsort对其跟踪,⽽后设计⼀系列的规则撞线进⾏两个⽅向的车流数量统计。
⽹上实现的⽅式有很多种,效果⼤同⼩异,可以择优选择学习。
⼀、实现原理基于之前的yolo+deepsort上,将person类别改为车辆类别,因为coco数据集中,车辆类别有⼏种【car,bus,truck】,所以都要保存下来。
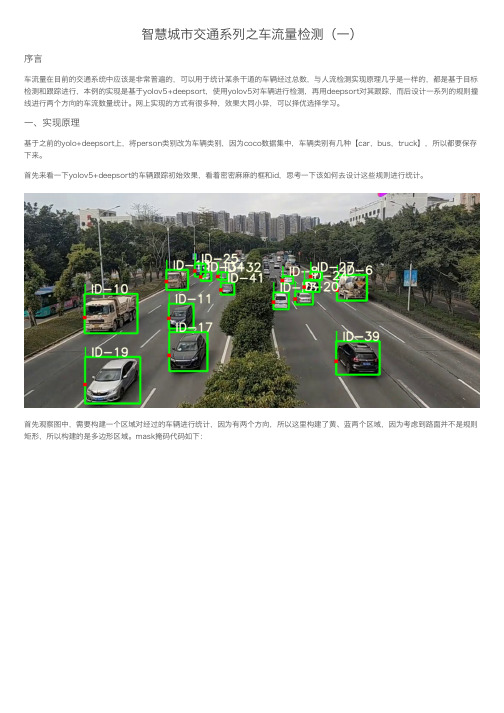
⾸先来看⼀下yolov5+deepsort的车辆跟踪初始效果,看着密密⿇⿇的框和id,思考⼀下该如何去设计这些规则进⾏统计。
⾸先观察图中,需要构建⼀个区域对经过的车辆进⾏统计,因为有两个⽅向,所以这⾥构建了黄、蓝两个区域,因为考虑到路⾯并不是规则矩形,所以构建的是多边形区域。
mask掩码代码如下:def draw_mask(height,width):# 根据视频尺⼨,填充⼀个polygon,供撞线计算使⽤mask_image_temp = np.zeros((height, width), dtype=np.uint8)# 初始化2个撞线polygon 蓝⾊list_pts_blue =[[277,305],[926,308],[983,344],[220,335]]# 蓝⾊多边形坐标,可根据⾃⼰的场景修改ndarray_pts_blue = np.array(list_pts_blue, np.int32)polygon_blue_value_1 = cv2.fillPoly(mask_image_temp,[ndarray_pts_blue], color=1)# 构建多边形polygon_blue_value_1 = polygon_blue_value_1[:,:, np.newaxis]# 填充第⼆个polygon 黄⾊mask_image_temp = np.zeros((height, width), dtype=np.uint8)list_pts_yellow =[[220,335],[983,344],[1030,370],[170,356]]# 黄⾊多边形坐标,可根据⾃⼰的场景修改ndarray_pts_yellow = np.array(list_pts_yellow, np.int32)polygon_yellow_value_2 = cv2.fillPoly(mask_image_temp,[ndarray_pts_yellow], color=2)# 构建多边形polygon_yellow_value_2 = polygon_yellow_value_2[:,:, np.newaxis]# 撞线检测⽤mask,包含2个polygon,(值范围 0、1、2),供撞线计算使⽤polygon_mask_blue_and_yellow = polygon_blue_value_1 + polygon_yellow_value_2# 缩⼩尺⼨,1920x1080->960x540polygon_mask_blue_and_yellow = cv2.resize(polygon_mask_blue_and_yellow,(width, height))# 蓝⾊盘 b,g,rblue_color_plate =[255,0,0]# 蓝 polygon图⽚blue_image = np.array(polygon_blue_value_1 * blue_color_plate, np.uint8)# 黄⾊盘yellow_color_plate =[0,255,255]# 黄 polygon图⽚yellow_image = np.array(polygon_yellow_value_2 * yellow_color_plate, np.uint8)# 彩⾊图⽚(值范围 0-255)color_polygons_image = blue_image + yellow_image# 缩⼩尺⼨,1920x1080->960x540color_polygons_image = cv2.resize(color_polygons_image,(width, height))return polygon_mask_blue_and_yellow,color_polygons_image最后掩码图如下,后⾯我们会告诉这个掩码怎么使⽤。
车流量检测方法纵览
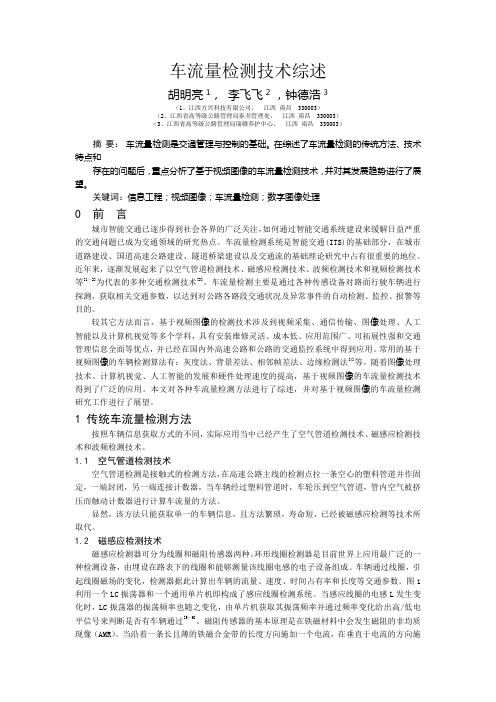
车流量检测技术综述胡明亮1,李飞飞2 ,钟德浩3(1、江西方兴科技有限公司,江西南昌330003)(2、江西省高等级公路管理局泰井管理处,江西南昌330003)(3、江西省高等级公路管理局瑞赣养护中心,江西南昌330003)摘要:车流量检测是交通管理与控制的基础。
在综述了车流量检测的传统方法、技术特点和存在的问题后,重点分析了基于视频图像的车流量检测技术,并对其发展趋势进行了展望。
关键词:信息工程;视频图像;车流量检测;数字图像处理0 前言城市智能交通已逐步得到社会各界的广泛关注,如何通过智能交通系统建设来缓解日益严重的交通问题已成为交通领域的研究热点。
车流量检测系统是智能交通(ITS)的基础部分,在城市道路建设、国道高速公路建设、隧道桥梁建设以及交通流的基础理论研究中占有很重要的地位。
近年来,逐渐发展起来了以空气管道检测技术、磁感应检测技术、波频检测技术和视频检测技术等[1~2]为代表的多种交通检测技术[3]。
车流量检测主要是通过各种传感设备对路面行驶车辆进行探测,获取相关交通参数,以达到对公路各路段交通状况及异常事件的自动检测、监控、报警等目的。
较其它方法而言,基于视频图像的检测技术涉及到视频采集、通信传输、图像处理、人工智能以及计算机视觉等多个学科,具有安装维修灵活、成本低、应用范围广、可拓展性强和交通管理信息全面等优点,并已经在国内外高速公路和公路的交通监控系统中得到应用。
常用的基于视频图像的车辆检测算法有:灰度法、背景差法、相邻帧差法、边缘检测法[4]等。
随着图像处理技术、计算机视觉、人工智能的发展和硬件处理速度的提高,基于视频图像的车流量检测技术得到了广泛的应用。
本文对各种车流量检测方法进行了综述,并对基于视频图像的车流量检测研究工作进行了展望。
1 传统车流量检测方法按照车辆信息获取方式的不同,实际应用当中已经产生了空气管道检测技术、磁感应检测技术和波频检测技术。
1.1 空气管道检测技术空气管道检测是接触式的检测方法,在高速公路主线的检测点拉一条空心的塑料管道并作固定,一端封闭,另一端连接计数器,当车辆经过塑料管道时,车轮压到空气管道,管内空气被挤压而触动计数器进行计算车流量的方法。
机器视觉车流量检测技术,智能交通的最好体现
机器视觉车流量检测技术,智能交通的最好体现
车流量检测一直是交通领域比较关注的项目,既可以保障道路行驶安全,也可以达到宏观调控的目的。
上篇我们说到,如今已经是智能交通时代了,也介绍了基于机器视觉的车牌识别技术的优势。
同时,机器视觉车流量检测技术是我国实现智能交通的最好体现,在整个交通领域都有着重要的地位。
长久以来,也存在了许多的车流量检测方法,但是,这些方法又多多少少存在了一定的弊端。
例如,超声波频检测技术:采取接收从车辆或地面反射回来的超声波来判断有无车辆通过的方法,此技术由于受电磁波传播过程中会出现衰减的影响,在实际应用中准确性较差;空气管道检测技术:通过车辆经过特定管道时,管内空气挤压而触动计数器的方式来检测,此技术显而易见方法比较繁琐,使用寿命短;电磁感应检测技术:此技术相对来说性能比较稳定、技术比较先进、也不太受环境因素的影响,但是,由于感应装置是固定埋在地面上的,一旦有车辆违章非正常行驶时,就容易产生误差了,而且路面的可维修性也相应降低了。
那幺,相对而言,机器视觉车流量技术则更具有成本低、稳定性强、准确性高、应用范围广、以及交通管理信息全面等优点,正因为如此,此技术目前已经在国内外高速公路和公路的交通监控系统中得到了广泛的应用。
机器视觉车流量检测技术能够为交通监测提供高质量的图像信息,实现准确可靠地道路交通的监视和控制。
检测系统主要是由视频采集、视频信号处理、车流量检测结果输出等几部分组成的,对应的,这些环节则是由机器。
交通流量监测结果应用总结
交通流量监测结果应用总结交通流量监测是一项重要的城市交通管理工作,通过收集、处理和分析交通流量数据,能够为城市的交通规划、路网优化和交通安全提供科学依据。
本文将对交通流量监测结果的应用进行总结,以期为相关工作提供参考。
一、交通流量监测方法交通流量监测主要借助传感器设备进行,常用的传感器包括交通相机、感应线圈、微波雷达等。
这些设备能够实时采集道路上车辆的数量、速度、车型等信息,并将数据传输到中心控制室进行处理。
二、交通流量监测结果应用1. 交通规划交通流量监测结果对交通规划的制定起到重要作用。
通过分析交通流量数据,可以了解某个地区的交通状况,包括高峰期交通拥堵情况、道路通行能力等,从而为交通规划部门提供科学依据。
例如,在城市道路繁忙的路口安装交通信号灯,可以根据交通流量监测结果来合理设置信号时长,以提高交通效率。
2. 路网优化交通流量监测结果还可以用于路网的优化。
通过对交通流量数据的分析,可以了解不同道路的通行能力以及交通拥堵情况,从而实施有效的路网调整。
例如,根据交通流量监测结果,可以增加某些道路的通行能力,或者建设新的道路,以缓解交通拥堵状况。
3. 交通安全交通流量监测结果对于提升交通安全至关重要。
通过监测交通流量数据,可以分析交通事故发生的频率、位置等信息,从而识别出交通事故频发的区域,并采取相应的安全措施。
例如,在事故易发区域增设交通标志、减速带等设施,以提醒驾驶员减速慢行,减少交通事故的发生。
4. 智能交通系统随着科技的不断发展,交通流量监测结果也可以应用于智能交通系统中。
通过将交通流量数据与智能交通设备相结合,可以实现更加智能化的交通管理。
例如,根据交通流量监测结果,智能交通系统可以自动调整交通信号灯的时长,根据道路拥堵情况实时调整交通流量,提高道路的通行效率。
三、交通流量监测结果应用存在的问题和建议1. 数据采集不全面:目前的交通流量监测设备覆盖范围有限,仍然存在数据采集不到位的问题。
《2024年基于目标检测及跟踪的车流量检测算法研究》范文
《基于目标检测及跟踪的车流量检测算法研究》篇一一、引言随着城市交通网络的快速发展和交通压力的不断增加,车流量的监测和分析成为智能交通系统的重要环节。
本文提出一种基于目标检测及跟踪的车流量检测算法,通过对道路中行驶车辆的准确检测与追踪,实现对车流量的实时监测和数据分析。
二、目标检测技术概述目标检测是计算机视觉领域的重要技术,主要任务是在图像或视频中识别出感兴趣的目标。
在车流量检测中,目标检测技术主要用于从道路监控视频中检测出行驶的车辆。
目前常用的目标检测算法包括基于深度学习的检测算法,如Faster R-CNN、YOLO等。
三、基于深度学习的车流量检测算法本文提出的算法以深度学习为基础,结合目标检测和跟踪技术,实现对车流量的实时监测。
具体步骤如下:1. 车辆目标检测:利用深度学习算法对道路监控视频进行车辆目标检测。
通过训练模型,使模型能够准确识别出道路上的车辆,并标记出其在视频帧中的位置。
2. 车辆目标跟踪:在车辆目标检测的基础上,利用跟踪算法对检测到的车辆进行持续跟踪。
通过分析连续帧中的车辆位置信息,实现车辆的稳定跟踪。
3. 车流量统计与分析:根据车辆目标检测和跟踪的结果,统计出单位时间内的车流量数据,并进行分析。
通过对车流量的分析,可以得出道路的交通状况、交通拥堵情况等信息。
四、算法实现与优化在算法实现过程中,需要考虑如何提高检测和跟踪的准确性和实时性。
为此,本文提出以下优化措施:1. 数据预处理:对道路监控视频进行预处理,如去噪、增强等操作,以提高图像质量,有利于提高目标检测的准确性。
2. 模型优化:通过调整模型参数、使用更深的网络结构等方式,提高模型对车辆的识别能力,降低误检和漏检率。
3. 跟踪算法优化:采用更高效的跟踪算法,如基于深度学习的跟踪算法,提高车辆跟踪的准确性和实时性。
4. 并行计算:利用GPU等并行计算资源,加速算法的运行速度,提高实时性。
五、实验与分析为了验证本文提出的算法的有效性,进行了实验分析。
智能交通系统中的交通流量监测与管理

智能交通系统中的交通流量监测与管理一、引言随着城市的不断发展和交通工具的日益普及,交通拥堵问题逐渐成为城市发展面临的重要挑战。
如何有效地监测和管理交通流量成为了智能交通系统研究的重要方向。
本文将重点介绍智能交通系统中的交通流量监测与管理的相关技术和方法。
二、交通流量监测技术1. 传感器技术传感器技术是交通流量监测中最常用的技术之一。
通过在交通道路、交叉口或收费站等地点安装各种传感器设备,如电感线圈、红外线传感器等,可以实时感知车辆的通过情况,并将数据传输到交通监测中心进行分析和处理。
2. 视频监测技术视频监测技术通过安装摄像头在交通要道上进行实时监控,利用计算机视觉和图像处理技术,对车辆数量、速度、车道占有率等进行自动分析和识别。
该技术能够实现较大范围的交通流量监测,并且可以利用图像缓存技术进行交通事件的回溯。
3. 无线通信技术无线通信技术在交通流量监测中起到了重要作用。
通过在交通设备上安装无线通信模块,可以实现设备之间的实时数据传输和通信。
这样可以方便地获取各个设备的数据,实现对交通流量的远程监测和管理。
三、交通流量管理方法1. 动态交通信号控制动态交通信号控制是一种根据实时交通流量情况来调整信号灯的时间和相位序列的方法。
通过监测交通流量,系统可以根据实际情况来合理调整信号灯的工作状态,从而达到减少交通拥堵的目的。
这种方法可以通过集中控制系统或者分布式控制系统来实现。
2. 路网动态优化路网动态优化是通过对整个路网的交通流量进行监测和分析,采取优化调整的方法来改善交通拥堵状况。
这种方法通常需要建立精确的交通流量模型,并借助交通控制中心的支持进行实时计算和调整。
3. 交通信息发布交通信息发布是指通过各种媒介,如公告牌、电视台、手机应用等,向公众发布交通拥堵信息和路况预测,以帮助司机和乘客选择更合适的路线和出行方式。
通过及时发布交通信息,可以引导交通流量的合理分布,有效减少拥堵状况。
四、智能交通系统实践案例1. 北京智能交通流量监测与管理系统北京市在交通流量监测与管理方面取得了丰硕的成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车流量检测技术综述胡明亮1,李飞飞2 ,钟德浩3(1、江西方兴科技有限公司,江西南昌330003)(2、江西省高等级公路管理局泰井管理处,江西南昌330003)(3、江西省高等级公路管理局瑞赣养护中心,江西南昌330003)摘要:车流量检测是交通管理与控制的基础。
在综述了车流量检测的传统方法、技术特点和存在的问题后,重点分析了基于视频图像的车流量检测技术,并对其发展趋势进行了展望。
关键词:信息工程;视频图像;车流量检测;数字图像处理0 前言城市智能交通已逐步得到社会各界的广泛关注,如何通过智能交通系统建设来缓解日益严重的交通问题已成为交通领域的研究热点。
车流量检测系统是智能交通(ITS)的基础部分,在城市道路建设、国道高速公路建设、隧道桥梁建设以及交通流的基础理论研究中占有很重要的地位。
近年来,逐渐发展起来了以空气管道检测技术、磁感应检测技术、波频检测技术和视频检测技术等[1~2]为代表的多种交通检测技术[3]。
车流量检测主要是通过各种传感设备对路面行驶车辆进行探测,获取相关交通参数,以达到对公路各路段交通状况及异常事件的自动检测、监控、报警等目的。
较其它方法而言,基于视频图像的检测技术涉及到视频采集、通信传输、图像处理、人工智能以及计算机视觉等多个学科,具有安装维修灵活、成本低、应用范围广、可拓展性强和交通管理信息全面等优点,并已经在国内外高速公路和公路的交通监控系统中得到应用。
常用的基于视频图像的车辆检测算法有:灰度法、背景差法、相邻帧差法、边缘检测法[4]等。
随着图像处理技术、计算机视觉、人工智能的发展和硬件处理速度的提高,基于视频图像的车流量检测技术得到了广泛的应用。
本文对各种车流量检测方法进行了综述,并对基于视频图像的车流量检测研究工作进行了展望。
1 传统车流量检测方法按照车辆信息获取方式的不同,实际应用当中已经产生了空气管道检测技术、磁感应检测技术和波频检测技术。
1.1 空气管道检测技术空气管道检测是接触式的检测方法,在高速公路主线的检测点拉一条空心的塑料管道并作固定,一端封闭,另一端连接计数器,当车辆经过塑料管道时,车轮压到空气管道,管内空气被挤压而触动计数器进行计算车流量的方法。
显然,该方法只能获取单一的车辆信息,且方法繁琐,寿命短,已经被磁感应检测等技术所取代。
1.2 磁感应检测技术磁感应检测器可分为线圈和磁阻传感器两种。
环形线圈检测器是目前世界上应用最广泛的一种检测设备,由埋设在路表下的线圈和能够测量该线圈电感的电子设备组成。
车辆通过线圈,引起线圈磁场的变化,检测器据此计算出车辆的流量、速度、时间占有率和长度等交通参数。
图1利用一个LC振荡器和一个通用单片机即构成了感应线圈检测系统。
当感应线圈的电感L发生变化时,LC振荡器的振荡频率也随之变化,由单片机获取其振荡频率并通过频率变化给出高/低电平信号来判断是否有车辆通过[5~6]。
磁阻传感器的基本原理是在铁磁材料中会发生磁阻的非均质现像(AMR)。
当沿着一条长且薄的铁磁合金带的长度方向施加一个电流,在垂直于电流的方向施加一个磁场,合金带自身的阻值会发生变化。
利用AMR 磁阻效应生产的AMR磁阻传感器成功地将三维方向(x,y,z)的单个传感器件集成在同一个芯片上,并将传感器与调节、补偿电路集成,即可检测到地磁范围内低于1高斯的磁场,根据一些铁磁物体对地磁的扰动来检测车辆的存在或识别车辆类型[7~8]。
图1感应线圈检测系统磁感应检测技术不受恶劣天气气候、日照光线强弱影响,性能稳定,并已经广泛应用在交通数据统计、交通控制和诱导等方面。
但由于线圈固定埋设在地面,当车辆违章非正常骑线行驶时,相邻车道的两个线圈均感应到金属车体并产生误判,而且埋设感应线圈后,路面可维修性降低。
1.3 波频检测技术波频车辆检测是对车辆发射电磁波产生感应的检测方法(多为悬挂式检测系统)。
根据发射电磁波的不同可分为雷达(微波)检测、超声波检测和红外检测等。
1.3.1 雷达检测技车辆检测雷达是调频连续波(FMCW,Frequency Modulated Continuous Wave)雷达。
该雷达发出的电磁波频率随线性调制信号电压的变化而变化。
将该雷达安装在马路边的竖起高杆上,俯向下往各车道发射微波,并接收各车道上车辆反射回来的微波。
由于不存在多普勒频移,各车道上车辆和雷达之间的距离不同,反射回来的电磁波与当前雷达发射的电磁波频率之差也不同,雷达通过对中频信号进行频谱分析,并判断各车道对应频率分量的强弱即可知道各车道有没有车辆存在。
检测雷达安装示意图见图2。
图2 雷达车辆检测器安装图车流量检测雷达主要由天线、收发组件射频单元、线性调制FPGA单元、中频放大器、信号处理机、ARM系统控制显示装置等7个单元组成,系统组成见图3[9~10]。
图3 车流量雷达系统框图1.3.2 超声波检测技术超声波检测器是基于声波的传播和反射原理,通过对发射波和反射波的时差测量实现位移测量的设备。
由超声波发生器发射一束超声波,再接收从车辆或地面的反射波,根据反射波返回时间的差别,来判断有无车辆通过。
图4 超声波发射器(探头)的安装示意图由图4可见,每个车道上的超声波检测装备各有前后二个探头,根据车辆的通过进程,超声波探测结果分为如图5所示的三种形态:①等待车辆;②车辆进入检测区;③车辆到达第二检测点。
通分析这三种形态,即可得到整条道路的车辆速度与流量信息等[11]。
图5 超声波探测的三种形态1.3.3 红外检测技术红外检测器是顶置式或路侧式的交通流检测器,一般采用反射式检测技术。
反射式检测探头由一个红外发光管和一个红外接收管组成。
由调制脉冲发生器产生调制脉冲,经红外探头向道路上辐射,当有车辆通过时,红外脉冲从车体反射回来,被接收管接收后经过解调、放大、整流滤波后输出一个检测信号送入单片机[12~14]。
显然,以上三种基于波频检测的方法中,由于电磁波在传播过程中会随着传播距离而衰减,回波信号非常微弱,几乎被噪声淹没,而且实际应用中还存在误判、遮挡、安装复杂、不便于维护、车流信息量不足等问题。
因此,很多学者将研究目标转向基于视频图像的车流检测。
2 基于视频图像的车流量检测随着计算机技术、数字图像处理、人工智能和模式识别等技术的发展,计算机视频技术在交通信息检测中占据了越来越重要的地位。
目前常用的基于视频车辆检测算法主要有:灰度比较法、背景差法[15]、帧差法[16]、边缘检测法[17]。
它通过对数字图像的处理获取交通流量信息,主要有以下优点:1.能够提供高质量的图像信息,信息量大,可以高效、准确、可靠地完成道路交通的监视和控制工作。
2.安装视频摄像机方便、经济,现在国内许多城市道路已经安装了摄像机监控系统。
3.计算机视觉和数字图像处理技术发展迅速,满足了系统实时性、可靠性方面的要求。
基于视频图像的车流量检测技术的基本思想是在视频图片中的每条车道上设置一个固定区域作为虚拟的检测线,再对该区域内图像进行处理,完成对车辆信息的获取。
背景差法将当前输入帧图像与背景图像进行差值计算,以分离出车辆。
但背景图像需要实时刷新,影响因素较多。
帧差法则是对相邻两帧图像进行差值计算,但不能支除摄像头抖动引起的干扰,对静止或速度慢(两帧图像中车辆运动位移不明显)的车辆无法有效检测。
边缘检测法通过对帧图像进行边缘检测,以提取车辆的边缘特征进行识别。
该方法可在不同的光线条件下进行检测,但对于车辆边缘不明显或存在道路隔离带等干扰物体时可能造成漏检和误检。
以上三种传统方法的算法流程见图6。
图6 三种方法算法流程图针对传统方法的不足,文献[18]通过分析光照、车道和阴影等模型间的关系来判断车辆的存在,提出了基于彩色虚拟检测线的交通流信息视频检测方法。
文献[19]结合边缘检测法,在算法中采用预估校正、相关性修正等措施对帧差法进行改善。
文献[20]实时自动提取和更新背景边缘并采用动态开窗的方式,利用边缘信息作为车辆特征,提出了基于边缘信息的背景差车流量检测方法。
文献[21]结合光流法,根据光流场的信息判断车辆通过,提出了基于虚拟线圈的光流法车流量检测方法。
文献[22]利用摄像机标定原理,根据成像模型提出了基于计算机视觉的车流量检测算法。
3 基于视频图像的车流量检测研究展望基于视频图像的车流量检测技术有着广阔的应用前景,对城市道路建设、国道高速公路建设、隧道桥梁建设、交通流的基础理论与控制等都有着积极的支持作用。
但是,在绝大部分实际应用中都有漏检、误检问题,基于目前已提出的各种方法,尚无一种能得到完美的解决,这也给进一步的研究提出了挑战。
目前,基于视频图像的车流量检测研究主要集中在以下几个方面。
3.1 改进图像处理方法基于视频图像的方法中,图像处理过程均是它们的基础。
图像处理涉及噪声、光照条件变化、多物体遮挡、误识别以及图像处理速度与质量问题。
同时,为了获取诸如车辆速度、加速度等更多的信息,有些学者将研究目光转向光流法和计算机视觉理论[23]。
为了改进图像处理的质量和速度,提高抵抗噪声、光照条件变化等因素影响的能力,有些学者提出将图像处理的抽像层次提高到线的层次,计算直线和曲线的线流场,或是将基于特征的方法和基于光流场的方法相结合起来。
文献[24]认为点-线对应是对图像运动中孔径问题最可靠的解决办法,提出了线性规划点-线对应的方法计算运动。
文献[25]利用Hough变换点-线对偶性提出了空间直线的表示方法及直线线流场的解释,并就直线线流场的计算做了研究。
文献[26~28]给出了适合光流计算中二次曲线坐标概念,提出用分段二次曲线描述边缘,并计算得到二次曲线的光流。
采用物体上的线作为图像处理的特征基元,从理论上说,至少有两个优点:一是从噪声图像中进行特征线的提取将比点更加稳定,对噪声的敏感程度也将降低;二是物体上的线(特别是棱线)是物体的稳定特征,它几乎不受光照条件的影响。
随着线流场理论的不断完善、增加更多的约束信息以及计算方法的不断改进,该方法将有很强的实际应用意义。
3.2 采用立体视觉的方法现有的视觉监控中,几乎所有的研究都是基于单目影像对运动物体的监测与跟踪,所得到的运动信息存在一个深度尺度因子,要想得到绝对移动量,需要一个附加条件。
立体视觉研究的是由多目视频图像获取物体三维几何信息的方法,它符合人们观察物体的习惯,也能获得三维物体的景深信息。
建立双目或多目立体视觉运动分析所要解决的核心问题是模型中的立体匹配问题。
3.3 人工神经网络等方法的应用人工神经网络是一个超大规模非线性连续时间自适应信息处理系统。
近年来,基于人工神经网络的目标检测方法得到了极大的发展[29~31]。
基于人工神经网目标检测方法的基本思路是将每帧图像分割为m×n个图像块,预处理后将这些图像块投影到一个线性滤波器组,得到不同的图像模式;然后把这些不同的图像模式根据预先计算得到的聚类原形进行分类;最后用训练得到的神经网络分类器来判断图像模式是否包含目标。