波音737-800建模大作业
波音737—800飞机飞行模型建立实验
学院:航空自动化
专业:导航制导与控制
1 实验目的
根据飞机所提供的QAR数据,把飞机的飞行过程分为几个阶段,通过受力分析计算得出飞机在各阶段的各个时刻的地速以及飞机当时所处的地球经纬度。这之后,再把计算出来的这些数据与QAR里面的相对应的数据进行比较,得出数据误差。使我们对飞机各阶段的机体受力分析得到验证,最后确定飞机的整个飞行过程的模型。
2 实验内容
分析所得的QAR数据,根据QAR数据对飞机的飞行过程进行分阶段处理。然后查找相关资料,对飞机在飞行各阶段过程中进行受力分析。进而用MATLAB软件编写程序,计算出飞机各个阶段的地速和地球经纬度。最后把计算出来的数据和QAR里相应的数据作比较,用MA TLAB画出比较曲线图,得出计算误差,建立起飞机的飞行过程模型。在整个实验过程中要修学的课程有:《大气数据应用分析》、《导航原理与系统》、《飞机的飞行性能》、《惯性导航原理》、《MATLAB应用与编程》等等。
3 实验步骤
3.1 QAR数据分析
QAR数据分析
数据英文数据意义和用途所用仪表备注
1 东经Present
Position
Longitude
由0°本初子午线向东、西递增到180°导航仪
2 北纬Present
Position
Latitude
赤道向北递增到90°导航仪
3 磁航向Heading
Magnetic
飞机纵轴在地平面上的投影,与磁子午线的
夹角(磁北顺时针转的夹角)。磁偏角:地
球表面任一点的磁子午圈同地理子午圈的夹
角。
磁罗盘上
有罗差修
正器,已经
抵消罗差,
所以磁罗
盘测的基
本就是磁
航向。
4 标准气压高度ALTITUDE 飞机到标准气压平面的垂直距离气压式高度表
5 左无线电高度RADIO HEIGHT
Left
飞机到地面的垂直距离
无线电高
度表
6 机场标高AIR/GROUND 机场与海平面的垂直高度
7 左主起落架Left main
gear air/end
起落架用于在地面停放及滑行时支撑飞机并
使飞机在地面上灵活运动,并吸收飞机运动
时产生的撞击载荷。主要用来判断飞机是否
起飞。
8 右主起落架Right main gear air/end
9 真空速Computed
airspeed
飞机相对于空气的运动速度,根据空速可计
算地速,从而确定已飞距离和待飞时间。
空速表0.5~1.0
10 马赫数MACH 真空速与飞机所在高度的音速之比,当飞机
的M数超过临界M数时,飞机的空气动力特
马赫数表0.5~1.0
性要发生显著变化,飞机的安全性,操纵性出现一系列变化,飞行员此时根据指示空速表不能判断飞机所受空气动力的情况必须测M数。
11 CAPT显示地速CAPT display
groundspeed
飞机相对于地面的运动速度。验证自己算的
地速用到。=
地速表
12 风速飞行管理
计算机
Wind speed
FMC
测量风速,大气数据
大气数据
计算机
13 风向飞行管理
计算机
Wind
direction
FMC
测量风向,大气数据
大气数据
计算机
14 航偏角飞行管
理计算机
DRIFT ANGLE
FMC
飞行偏离目标航线的角
15 惯性垂直速度Inertial
vertical
speed
垂直方向的速度
升降速度
表
16 垂直加速度Vertical
Acceleration
垂直方向加速度,Z轴方向加速度
17 横向(纬)加
速度
Lateral
Acceleration
Y轴方向加速度,北向
18 纵向(经)加
速度
Longitudinal
Acceleration
X轴方向加速度,东向
19 左转速表LEFT ENG N1
TACHOM
测量左侧和右侧发动机的工作速度,与进气
压力表配合可以反映发动机的功率。计算发
动机推力的时候用到.
转速计
20 右转速表RIGHT ENG N1 TACHOMETER
21 飞机总重量GROSS WEIGHT 受力分析计算重力用到
22 迎角Angle of
attack
对于固定翼飞机,机翼的前进方向(相当于
气流的方向)和翼弦(与机身轴线不同)的
夹角叫迎角,也称为攻角,它是确定机翼在
气流中姿态的基准。计算发动机功率P时用
迎角传感
器
23 俯仰角CAPT DISPLAY
PITCH ATT
飞机机身轴线或者机翼弦线和水平线的夹
角。起飞后,计算阻力在水平和垂直方向上
的分力用到。
陀螺地平
仪
24 滚转角Capt Disp
Roll Att
飞机机翼所在x轴相对于z轴所转动的角度。
陀螺侧滑
仪
根据上述数据分析我得到整个飞行过程的几个图形用以直观感受:
图一
无线电测高的极限为5500英尺,所以红色曲线在下方。
图二表明的是飞机从始发点到终点的整个经纬度和高度的实时曲线,由于飞机是从北京飞往重庆的,所以曲线从里到外,经纬度在不断减小,高度由低到高再由高到低。
图二
图三是为了验证地速=空速+风速,红色曲线代表的是空速+风速的值,蓝色曲线代表的是QAR中地速的值,由于没有考虑风向,再加上QAR数据本身不准确,所以两天曲线重合度并不高。
图三
3.2 理论分析
(1)比力
加速度计是用来测量载体相对惯性空间运动加速度的传感器,加速度计测量的并不是载体的运动加速度,而是载体相对惯性空间的绝对加速度和引力加速度之差,这叫做比力。
比力的定义:
设一质点P ,质量为m ,在惯性坐标系中的位置矢量为R ,则由牛顿第二定律,有
R ..
22m ==dt
R
d m F (1)
引外F F F += (2) 这里 mG F =引 (3)
其中。错误!未找到引用源。为作用在P 点上的引力,G 为引力加速度。由此得 R m
mG F ..
=+引 (4)
或
G F R
-=..m 外
错误!未找到引用源。(5)
定义比力f 为
f m
=外
F (6)
则
(7)
即比力是作用在单位质量上的外力,比力也称作非引力加速度。
(2)比力方程
载体相对地球运动,地球又相对惯性空间运动,因此,对地球表面的运动载体而言,由加速度计输出的比力表示了载体相对惯性系的非引力加速度;而对于在地球表面导航的载体,需要知道载体相对地球系的加速度,比力方程表示了载体、地球系、惯性系这三者之间的运动关系。设载体在地心惯性坐标系中的位置矢量为R ,则利用矢量的相对导数和绝对导数之间的关系。载体的位置矢量R 在地心惯性坐标系中的导数可表达为
R w ie e
i
dt
dR dt
dR ?+=
(8)
式中错误!未找到引用源。为载体相对地球的速度;错误!未找到引用源。为地球自转的角速度,错误!未找到引用源。为地球自转产生的牵连加速度。
用错误!未找到引用源。代表载体相对地球的运动速度,即错误!未找到引用源。,则有
R w V ie ep i
dt
dR ?+= (9)
将上式两边在惯性系中求导,得
)(R 2
2R w dt
d
dt dVep dt d ie i
i
i
?+=
(10)
考虑
ie w 为常值,则
dt
dR dt
dV dt d i
ie
i
i
w ep ?+=
2
2R
(11)
因Vep 的各分量是沿平台坐标系(理论上沿导航坐标系,一般选取地理坐标系)的,故平台以坐标系P 作为动坐标系。则
ep ip p
i
v w ep ep dt
dV dt
dV ?+=
(12)
将上面(9)(12)代入(11)
)()2(2
2R R w w v w w ep ie ie ep ep ie p
i
dt
dv dt d ??+?++=
(13)
令
.
ep p
V ep dt
dV =则有
)()2(2
2.
R R w w v w w v ie ie ep ep ie ep i
dt d ??+?++= (14)
由G f R +=..
)()2(.
R w w v w w v G f ie ie ep ep ie ep ??+?++=+ (15)
考虑到地球的重力场是地球引力和地球自转产生的离心力的矢量和,即
)(R w w G g ie ie ??-= (16)
则
g v w w v f ep ep ie ep -?++=)2(.
(17)
上式即为比力方程,它是惯性导航中的系统中的一个基本方程,比力方程说明了加速度计输出的比力中所包含的物理量,其中.
ep v 是导航所需要的,其他的量都需要实时扣除掉。
(3) 加速度信息的提取 式(17)改写为
B ep ep ie ep a f g v w w f v -=-?+-=])2[(.
(18) 式中通常称B a 为有害加速度,因为它对计算所需要的.
ep v 带来了麻烦,必须要从测得的比力f 中补偿掉,才能提取出载体的运动加速度.
ep v 。B a 包含两部分,一部分是重力加速度g ,另一部分是哥氏加速度和法向加速度。
由于加速度是在机体坐标系下得到,故需要将其转换到地理坐标系上,即为
????
??????=??
????????bz by bx n b tz ty tx a a a C a a a ,
n b C 为由机体坐标系转移到地理坐标系的转移矩阵。将在地理坐标系下的加速度代入
(18)中,即可得到所需要的加速度。经过积分即可得到各轴的速度。
那么经纬度
00??+=?dt R v t
t y
t y
00c o s λ?λ+=?dt R v t
t
x t
x
0?为初始纬度,0λ为初始位移,?为纬度。
)sin 1(1?e R R e t
x -=
)s i n 321(12?e e R R e
t
y -+= e 为椭球度,e R 为赤道半径。
几个主要的坐标系:
1.地心惯性坐标系(i 系)。地球绕太阳公转,其公转速度为29.8km/h,地心和日心距离810496.1?km,公转周期为365.2422d ,向心加速度为4
1005.6-?g ,公转角速度为
。
041.0/h ,由于地球公转角速度很小,在研究地球表面的导航时,对导航的精度影响一般可
以不考虑,可将惯性坐标系的原点取在地心,且原点随地球移动,z 轴是沿地球的自转轴,x 轴,y 轴在赤道平面内,指向太阳系外的任意恒星。
2.地球坐标系(e 系)。随地球一起转动,其原点在地心,z 轴沿地球自转的方向,x 轴在赤道平面内,与零度子午线相交,y 轴与x 轴,z 轴构成右手直角坐标系,
3.地理坐标系(g 系)。原点位于载体质心,其中一坐标轴沿当地地理垂线的方向,另外两个轴在当地水平面内分别沿当地经线和纬线的切线方向。本次采用x 轴指向东,y 轴指向北,z 轴垂直与当地水平面,沿当地垂线向上。
4.载体坐标系(b 系)。原点与载体质心重合,对于飞机等巡航载体,x 轴沿载体横轴向右,y 轴沿载体纵轴向前,z 轴沿载体竖轴向下。
5.平台坐标系(p 系)。描述平台是惯导系统中平台指向的坐标系,它与平台固连。
6.导航坐标系(n 系)。它是惯性导航系统在求解导航参数时所采用的坐标系,通常,它与导航系统所在的位置有关,对平台式惯导系统来说,理想的平台坐标系就是导航坐标系,一般选取地理坐标系,对捷联式惯导系统来说,导航参数并不在载体坐标系内求解,它必须在加速度计信号分解到某个求解导航参数较为方便的坐标系,再进行导航计算,这个方便求解导航参数的坐标系就是导航坐标系,一般也是取地理坐标系。
几种坐标变换:
1.惯性坐标系--地球坐标系
由惯性坐标系i i i Z Y X 到地球坐标系e e e Z Y X ,只需经过一次平面旋转:
[]????
?
?????-==1000cos sin 0sin cos t w t w t w t w t w C ie ie ie ie z ie e i i
2.惯性坐标系--地理坐标系
需要两次坐标变换: 第一次:
[]
????
????
?
?-=10
00cos sin 0sin cos /
////
λλλλλi
z 第二次:
????
??????---=??????
?
???????++-++=???
???+-L L L L L L L L L i
Y sin 0cos 010cos 0sin )2π
cos(0)2πsin(010)2πsin(0)2πcos()2π(/ 于是,由于地心惯性坐标系到地理坐标系的坐标变换矩阵为
[]
????
?
?????------=????
?
?????-??????????---=???
???+-=L L L L L L L L L L L C i
i z Y n i sin cos sin cos cos 0cos sin cos sin sin sin cos 10
0cos sin 0sin cos sin 0cos 010cos 0sin )2π(///////
/
///
/
λλλλλλλλλλ
λ 式中,L--地理纬度,t w l l ie +-=0/λ--黄经 3.地球坐标系--地理坐标系 第一次:
[]????
?
?????-=1000cos sin 0sin cos λλλλλe
z
第二次:
????
??????---=??????
?
???????++-++=??????+-L L L L L L L L L e
Y sin 0cos 010cos 0sin )2π
cos(0)2πsin(010)2πsin(0)2πcos()2π(/ 于是,由于地球坐标系到地理坐标系的坐标变换矩阵为:
[]
??
??
?
?????------=?????
?????-??????????---=??????+-=L L L L L L L L L L L C e
e z Y n e sin cos sin cos cos 0cos sin cos sin sin sin cos 1000cos sin 0sin cos sin 0cos 010cos 0sin )2π(/
/
λλλλλλλλλλλ
式中,t w l l ie -=-=/0λλ,为本地地理纬度经度与原点地理经度之差。 4.地理坐标系--运载体坐标系
航向角(?)——运载纵轴与北向轴之间的夹角,在水平面测量,顺时针为正; 俯仰角(θ)——运载体纵轴与水平面之间的夹角,在垂直面中测量,抬头为正; 横滚角(φ)——运载体横轴与水平面之间的夹角,在横截面测量,左边抬起为正。 第一次:
[]????
??????-=10
00cos sin 0sin cos ?
????D
第二次:
[]????
??????-=θθ
θθθcos 0sin 010sin 0cos /
b
y
第三次:
[]????
?
?????-=φφ
φφφcos sin 0sin cos 0001
//
b
x
因此,由地理坐标系到运载体坐标系的坐标变换矩阵为
[][][]????
?
?????
+-+++--=??
??
?
?????-??????????-??????????-==φθφθ?φ?φθ?φ?φθφθ?φ?φθ?φ?θφ?θ?????θθ
θθ
φφ
φφ?θφcos cos cos sin sin sin cos cos sin cos sin sin sin cos sin sin sin cos cos sin sin cos cos sin sin cos sin cos cos 1000cos sin 0sin cos cos 0sin 010sin 0cos cos sin 0sin cos 0001///D
y x b n b b C
3.3 地面滑跑阶段 3.3.1受力分析
F n 为飞机发动机的推力,f 1为空气阻力,f 2为地面摩擦力,L 为飞机升力,N 为地面支持力,
G 为飞机所受的当地重力。
3.3.2地速计算
在机体坐标系下,由牛顿第二定律可列出以下等式:
/)02
1
(=-
-
==a m f
f
F a a c z
n
c y c
x 飞机 (1)
N
L
F n G
f 1
f 2
图3.3.1滑跑阶段机体受力右视图
P
P
N F
F
M C
S C
f
s
e
n
L
w D
a
L
G N L 0
12
2
2
1
/
1****4/1****5.0**
*5.0εερρυυ+=
≈-=== (2)
N f
*2
μ=
F e
为飞机的额定推力,
N
1
为飞机发动机的低压转子转速,
P
s
为当地大气压强,ε为修
正系数,
P
为标准大气压强;ρ为当地空气密度,υ为飞机空速,
S
w
为飞机机翼总面积,
C
D
为空气阻力系数;μ为跑道地面摩擦系数;
C
L
为飞机升力系数;
M
a
为飞机的马赫
数。
上述数据近似取为
F
e
=27300磅,
C
D
=0.02,
C
L
=1.8,
S
w
=1171平方英尺,
M
a
=0.23,
P
=101325pa,在水泥地板上取μ=0.03。根据以上数据,再结合QAR 数据表,
我用MATLAB 编写的一个计算此阶段各个时刻的地速的程序:
%滑跑阶段,42秒,F=ma 方法
clc;%清空命令区域
clear all ;%清空工作区与全局变量 close all ;%关闭所有窗口 %机体坐标系(b 系)
axb=0;%X 和Y 坐标轴上无加速度 azb=0;
data=xlsread('DH_data');%将EXCEL 数据(QAR 数据)导入MATLAB mach=data(1:42,8);%马赫,真空速与飞机所在高度的音速之比
%ias=data(:,7);%空速,飞机相对于空气的运动速度,单位节knot=1海里/小时=1852m/3600s
gs=data(1:42,9);%地速,飞机相对于地面的运动速度,单位节
N1=91/60;%N1转子取平均值,单位转/秒
gs=gs*1852/3600;%地速,单位从节换算为米/秒 ias=gs;%空速,QAR 数据不对,故取近似取地速
Fe=2*27300*4.448;%27300为单台发动机的额定推力,2表示双发动机,4.448是把单位换
算为牛顿的系数
m=167500*0.454;%飞机质量,将单位从磅换算为千克
g=9.8;%重力加速度,单位米/二次方秒
miu=0.03;%飞机在水泥地上受到的摩擦力系数
Cd=0.2;%空气阻力系数
Cl=1.8;%飞机升力系数
rou=1.23;%当地空气密度,单位千克/立方米
Sw=1171*0.093;%飞机机翼总面积,平方英尺换算为平方米
P0=101325;%标准大气压强
Ps=77541;%飞机所处大气压强
%以下参数为向量
kexi=1/4*mach.^2;%修正系数
G=m*g;
Fn=Fe*N1*sqrt(Ps*(1+kexi)/P0);%发动机推力
F1=0.5*rou*ias.^2*Sw*Cd;%空气阻力
L=0.5*rou*ias.^2*Sw*Cl;%飞机升力
N=G-L;%地面支持力
F2=miu*N;%地面摩擦力
ayb=(Fn-F1-F2)/m;%飞机Y轴方向的加速度
vyb=1:42;
vyb(1)=0;%初始时刻Y轴方向速度为0
for k=2:42
vyb(k)=vyb(k-1)+ayb(k);
end
hold on;
grid on;
plot(vyb,'*');
plot(gs,'r*');
title('滑跑阶段地速比较图');%图片标题
xlabel('飞行时间t:单位s','color','b');%坐标轴注释
ylabel('飞行速度:单位m/s','color','b');
legend('计算得出的地速','QAR数据给出的地速',2);%添加图例,2表示放在图形内左上角位置
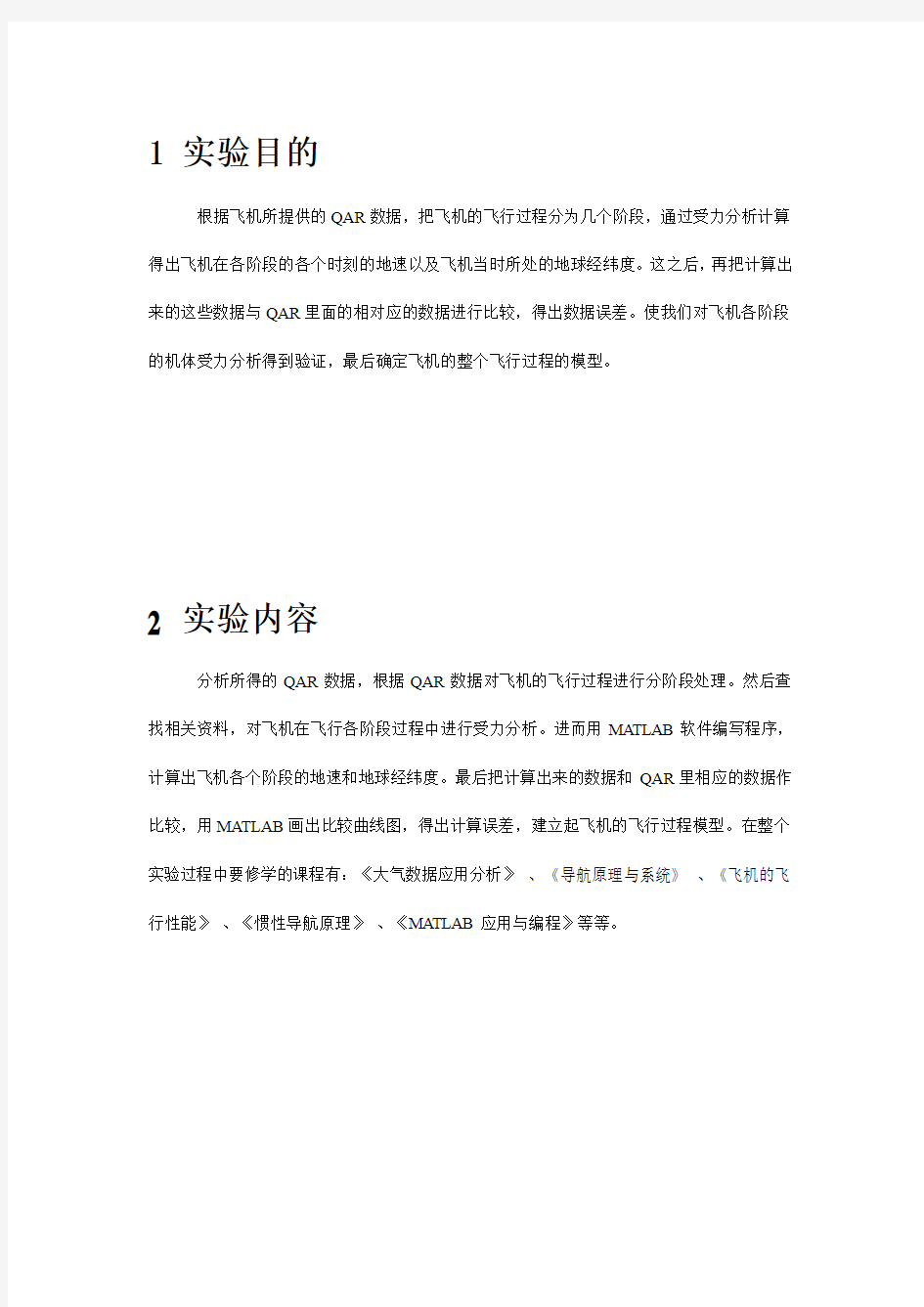
此程序执行的结果为:
图3.3.2 地速计算结果比较图
3.3.3 计算结果分析
由图3.3.2可知,滑跑阶段总共42秒,误差还是非常大的。我们分析原因在于,一方面计算公式都采用近似公式,另一方面给出的初始值并不准确,同时忽略了风向,计算的累计误差越来越大。
α
3.4 爬升阶段 3.
4.1受力分析
此阶段我不考虑风向的影响,此时飞机往上爬升,受力分析可得:
F n
L
f 1
G
图3.4.1 爬升阶段机体受力右视图
r
L
N
图3.4.2 爬升阶段机体受力俯视图
3.4.2 地速计算
如图3.4.1所示,G 为飞机所受的重力,Fn 为飞机发动机的实时推力,f 1为飞机所受的空气阻力,L 为飞机所受到的升力。此时飞机是无翻转角的往上爬升。θ为飞机的俯仰角,α为飞机的航向角。
m
a m f F a a G L G c n
c y
c
x 飞机
飞机
/)cos *(/)sin *0
z
1
(θθ-=--== (3)
P
P N F F C f C s
e
n
D
L
L 0
1
2
1
2
/
1*
*****5.0***5.0ερρυυ+=== (4)
但是在图3.4.3,r 为飞机的滚转角。当飞机有滚转角时,在机体坐标系下,飞机的受力为:
m a
m a r G L r G c
z c x 飞机
飞机/cos */sin *-== (5)
在爬升阶段,由于飞机的飞行高度是不断上升的过程,在此过程中大气的各项数据也随着飞机的海拔高度的变化而变化。在公式(3)和(4)中,空气密度ρ和P
s
可以根据海拔高度
的变化去查询大气数据表而得出。升力系数
C
L
取为2,,阻力系数
C
D
取为3.5。
我编写计算此阶段的对地速度MATLAB 程序如下:
%爬升阶段(241秒),F=ma 方法
clc;%清空命令区域
clear all ;%清空工作区与全局变量 close all ;%关闭所有窗口
data=xlsread('DH_data');%将EXCEL 数据(QAR 数据)导入MATLAB mach=data(43:283,8);%马赫,真空速与飞机所在高度的音速之比
%ias=data(:,7);%空速,飞机相对于空气的运动速度,单位节knot=1海里/小时
=1852m/3600s
gs=data(43:283,9);%地速,飞机相对于地面的运动速度,单位节
head_mag=data(43:283,4);%磁航向,飞机纵轴在地平面上的投影,与磁子午线的夹角(磁北顺时针转的夹角),单位度deg
pitch=data(43:283,23);%俯仰角,机体坐标系下用到
roll=data(43:283,24);%滚转角
head_mag=head_mag*pi/180;%角度换算
pitch=pitch*pi/180;
roll=roll*pi/180;
N1=91/60;%N1转子取平均值,单位转/秒
gs=gs*1852/3600;%地速,单位从节换算为米/秒
ias=gs;%空速,QAR数据不对,故近似取地速
Fe=2*27300*4.448;%27300为单台发动机的额定推力,2表示双发动机,4.448是把单位换算为牛顿的系数
m=167500*0.454;%飞机质量,将单位从磅换算为千克
g=9;%重力加速度,单位米/二次方秒
Cd=3.5;%空气阻力系数
Cl=2;%飞机升力系数
rou=1.23;%当地空气密度,单位千克/立方米
Sw=1171*0.093;%飞机机翼总面积,平方英尺换算为平方米
P0=101325;%标准大气压强
Ps=77541;%飞机所处大气压强
%以下参数为向量
kexi=1/4*mach.^2;%修正系数
G=m*g;
Fn=Fe*N1*sqrt(Ps*(1+kexi)/P0);%发动机推力
F1=0.5*rou*ias.^2*Sw*Cd;%空气阻力
L=0.5*rou*ias.^2*Sw*Cl;%飞机升力
%机体坐标系(b系)
axb=(G*sin(roll))/m;
ayb=(Fn-F1-G*sin(pitch))/m;%飞机Y轴方向的加速度
azb=(L-G*cos(roll)-G*cos(pitch))/m;
%地理坐标系(g系)
x1=cos(head_mag).*cos(roll);
x2=sin(head_mag).*sin(pitch).*sin(roll);
x3=cos(pitch).*sin(head_mag);
x4=cos(head_mag).*sin(roll);
x5=sin(head_mag).*sin(pitch).*cos(roll);
axg=axb.*x1-x2+ayb.*x3+azb.*x4+x5;
数学建模大作业
兰州交通大学 数学建模大作业 学院:机电工程学院 班级:车辆093 学号:200903812 姓名:刘键学号:200903813 姓名:杨海斌学号:200903814 姓名:彭福泰学号:200903815 姓名:程二永学号:200903816 姓名:屈辉
高速公路问题 1 实验案例 (2) 1.1 高速公路问题(简化) (2) 1.1.1 问题分析 (3) 1.1.2 变量说明 (3) 1.1.3 模型假设 (3) 1.1.4 模型建立 (3) 1.1.5 模型求解 (4) 1.1.6 求解模型的程序 (4) 1实验案例 1.1 高速公路问题(简化) A城和B城之间准备建一条高速公路,B城位于A城正南20公里和正东30公里交汇处,它们之间有东西走向连绵起伏的山脉。公路造价与地形特点有关,图4.2.4给出了整个地区的大致地貌情况,显示可分为三条沿东西方向的地形带。 你的任务是建立一个数学模型,在给定三种地形上每公里的建造费用的情况下,确定最便宜的路线。图中直线AB显然是路径最短的,但不一定最便宜。而路径ARSB过山地的路段最短,但是否是最好的路径呢? A B 图8.2 高速公路修建地段
1.1.1 问题分析 在建设高速公路时,总是希望建造费用最小。如果要建造的起点、终点在同一地貌 中,那么最佳路线则是两点间连接的线段,这样费用则最省。因此本问题是一个典型的最优化问题,以建造费用最小为目标,需要做出的决策则是确定在各个地貌交界处的汇合点。 1.1.2 变量说明 i x :在第i 个汇合点上的横坐标(以左下角为直角坐标原点),i =1,2,…,4;x 5=30(指目的地B 点的横坐标) x=[x 1,x 2,x 3,x 4]T l i :第i 段南北方向的长度(i =1,2, (5) S i :在第i 段上地所建公路的长度(i =1,2, (5) 由问题分析可知, () ()() () 2 542552 432442 322332212 222 1211x x l S x x l S x x l S x x l S x l S -+=-+=-+=-+=+= C 1:平原每公里的造价(单位:万元/公里) C 2:高地每公里的造价(单位:万元/公里) C 3:高山每公里的造价(单位:万元/公里) 1.1.3 模型假设 1、 假设在相同地貌中修建高速公路,建造费用与公路长度成正比; 2、 假设在相同地貌中修建高速公路在一条直线上。在理论上,可以使得建造费用最少, 当然实际中一般达不到。 1.1.4 模型建立 在A 城与B 城之间建造一条高速公路的问题可以转化为下面的非线性规划模型。优化目标是在A 城与B 城之间建造高速公路的费用。 () 4,3,2,1300. .)(min 5142332211=≤≤++++=i x t s S C S C S C S C S C x f i
物流仿真大作业.doc
物流系统仿真 期末作业 题目:Manufacturing System Planning and Scheduling 班级:物流工程131 学号:1311393003 1311393008 姓名:黎宇帆张力夫 日期:2015-09-19 成绩:
制造系统规划与调度 翻译 2.1引言 现代生产调度工具是非常强大的,提供了广阔的范围内调整工具的行为的真实过程要求的选项和参数。 然而,更多的选项的存在,它就在实践中找到的工具的最佳配置更加困难。 即专家们经常无法预测的多种可能性的影响。 测试甚至一小部分在现实中可能的配置,对实际生产过程的影响可能需要几个月的时间,可能会严重降低整体性能。 因此,这样的试验在实践中是不可行的。 优化的生产调度仿真模型比使用真正的过程更安全,更便宜,更快,更容易测试。为了在一个中等规模的制造公司充分使用先进的调度工具的优势,找到它的一个最佳的规则和参数的优化配置。 模块化仿真模型的整个业务的制造系统和生产过程中阳极氧化阶段是建立以测试不同的调度配置的影响。调度工具的配置测试和优化进行了离线使用的仿真模型。实际生产过程不受干扰,可以非常快速、低成本的找到最优配置。 2.2问题描述 位于英国的一个中型制造商,生产一系列的不同的小压铝零件和一系列大批量的其他面向消费者的产品。典型的应用包括香水的喷雾组件和哮喘患者的分配器。这是一个高度竞争的行业,成功取决于是否能实现高效率和低成本制造。所以生产调度是非常重要的。 在过去,该公司安装的软件工具可以支持生产过程中的各个区域调度。全面提高公司绩效,增加产量和减少产品的交货时间,他们计划建立自动电抗器的供应链规划服务器–总调度系统协调当地所有的业务和生产区。为了提供最好的解决方案,调度工具供应商,预优国际(https://www.360docs.net/doc/3212741626.html,)决定使用模拟求解调度工具的优化配置。 问题是建立一个仿真工具,它将接受的到来客户订单和生产订单排序以满足这些需求。一个重要的地方是模型的生产过程本身,以确保它的主要阶段的最佳时刻加载。阳极氧化阶段是整个生产过程中特别重要的,因此,它必须是非常详细的模拟,以测试到整体订单的交货时间可以通过阳极氧化过程阶段优化减少到什么程度。 在这种情况下的研究主要目标是以下几个: (1)为了确定公司模型间的相关业务和生产过程和确定订单和交货时间, (2)在规划部门分析和优化业务流程,为了处理传入的需求和规划生产订单。 (3)测试的整体生产时间,提高灵敏度,特别是确定是否引入特定排序规则的生产订单将减少在阳极氧化处理阶段总的处理时间。
PROE三维绘图实例
2011-2012年第一学期 《Pro/E三维造型》课程期末综合作业 题目:电脑摄像头的制作 班级:XXXXX 姓名:XXXXX 学号:XXXXX 电话:XXXXXXXX Email: 日期:
设计构思:本次设计实体为立式电脑摄像头,实体绘制过程中主要运用了拉伸、旋转特征,辅助以扫描、螺旋扫描、阵列、圆角、基准点、面等。特征设计中忽略了实体内部的镶嵌结构,以及弹簧、光学透镜镜片、电线、螺钉等结构。从工程实践来讲,该实体并不能用单个的零件来阐述,完成的prt文件只能代表摄像头外形特征,并不具有实际意义。 实物图片
模型截图 制作步骤与说明: 一、绘制头部: 【1】打开程序,先新建一个模型文件:点击系统工具栏里的“新建”图标,在弹出的“新建”对话框中保持默认值,单击“确定”按钮,进入零件设计界面。 【2】单击下拉菜单【插入】、【旋转】命令,或者直接单击特征工具栏中的“旋转工具” 的“定义”按钮,以绘制旋转截面。 【3】系统弹出“草绘”对话框,选择FRONT面为草绘平面,接收系统默认草绘方向, 单击“草绘”按钮,进入草绘工作状态。
【4】如图1所示:先绘制一条旋转轴线(图中竖直虚线),再绘制一个直径100的圆(圆心过旋转轴线),在剪切至图1所示。 图1 【5】单击草绘工具栏下面的按钮,系统回到零件设计模式。此时单击“预览”按钮,模型如图2所示: 图2
【6】接受默认值,单击按钮,完成曲面旋转特征。单击下拉菜单中的【文件】,【保存 副本】菜单命令,在新建名称中输入“qiuke”,保存。 【7】在模型树中选中“旋转1”,单击【编辑】、【实体化】,然后点击按钮,将上一步 得到的球壳实体化得到球。 二、绘制双耳: 【8】单击特征工具栏里的“基准平面工具”,选择RIGHT平面,偏移距离设置为45,新建一个基准平面;再在RIGHT平面另一边新建一个对称基准平面,名称分别为DTM1和DTM2。 【9】单击特征工具栏中的“拉伸”,选择“拉伸为实体”,以DTM1基准平面为草绘平面,绘制一个直径60的圆,单击完成草绘,拉伸实体参数分别为,单击得到实体局部切槽如图3所示。对切口进行倒圆角处理,圆角半径设为0.5。 图3 【10】重复上一步,以DTM2为基准,得到与步骤9对称的切口。如图4所示:
系统仿真示例
Flexsim应用案例示例 示例一港口集装箱物流系统仿真 (根据:肖锋,基于Flexsim集装箱码头仿真平台关键技术研究,武汉:武汉理工大学硕士学位论文,2006改编) 1、港口集装箱物流系统概述与仿真目的 1.1港口集装箱物流系统概述 1.2港口集装箱物流系统仿真的目的 2、港口集装箱物流系统的作业流程 2.1港口集装箱物流系统描述 2.2港口集装箱物流系统作业流程 2.3港口集装箱物流系统离散模型分析 3、港口集装箱物流系统仿真模型 3.1港口集装箱物流系统布局模型设计 3.2港口集装箱物流系统设备建模 3.3港口集装箱物流系统仿真 4、仿真运行及数据分析 4.1仿真运行及数据处理 4.2仿真数据的结果分析 小结与讨论 示例二物流配送中心仿真 (根据:XXX改编) 1、物流配送中心概述与仿真目的 1.1物流配送中心简介 1.2仿真目的 2、配送中心的作业流程描述 2.1配送中心的功能 2.2配送中心的系统流程
3、配送中心的仿真模型 3.1配送中心的仿真布局模型设计 3.2配送中心的设备建模 3.3配送中心的仿真 4、仿真运行及数据分析 4.1仿真运行及数据处理 4.2仿真数据结果分析 4.3系统优化 小结与讨论 “我也来编书”示例 示例一第X章排队系统建模与仿真学习要点 1、排队系统概述 2、排队系统问题描述 3、排队系统建模 4、排队系统仿真 5、模型运行与结果分析 小结 思考题与习题(3-5题) 参考文献 1、李文锋,袁兵,张煜.2010.物流系统建模与仿真(第6章) 北京:科学出版社 2、王红卫,谢勇,王小平,祁超.2009.物流系统仿真(第6章) 北京:清华大学出版社 3、马向国,刘同娟.2012.现代物流系统建模、仿真及应用案例(第5章)
数学建模期末大作业
数学建模期末大作业论文 题目:A题美好的一天 组长:何曦(2014112739) 组员:李颖(2014112747)张楚良(2014112740) 班级:交通工程三班 指导老师:陈崇双
美好的一天 摘要 关键字:Dijkstra算法多目标规划有向赋权图 MATLAB SPSS
1 问题的重述 Hello!大家好,我是没头脑,住在西南宇宙大学巨偏远的新校区(节点22)。明天我一个外地同学来找我玩,TA叫不高兴,是个镁铝\帅锅,期待ing。我想陪TA在城里转转,当然是去些不怎么花钱的地方啦~~。目前想到的有林湾步行街(节点76)、郫郫公园(节点91),大川博物院(节点72)。交通嘛,只坐公交车好了,反正公交比较发达,你能想出来的路线都有车啊。另外,进城顺便办两件事,去老校区财务处一趟(节点50),还要去新东方(节点34)找我们宿舍老三,他抽奖中了两张电影票,我要霸占过来明晚吃了饭跟TA一起看。电影院嘛,TASHIWODE电影院(节点54)不错,比较便宜哈。我攒了很久的钱,订了明晚开心面馆(节点63)的烛光晚餐,额哈哈,为了TA,破费一下也是可以的哈。哦,对了,老三说了,他明天一整天都上课,只有中午休息的时候能接见我给我票。 我主要是想请教一下各位大神: 1)明天我应该怎么安排路线才能够让花在坐车上的时间最少? 2)考虑到可能堵车啊,TA比较没耐心啊,因为TA叫不高兴嘛。尤其是堵车啊,等车啊,这种事,万一影响了气氛就悲剧了。我感觉路口越密的地方越容易堵,如果考虑这个,又应该怎么安排路线呢? 3)我们城比较挫啊,连地图也没有,Z老师搞地图测绘的,他有地图,跟他要他不给,只给了我一个破表格(见附件,一个文件有两页啊),说“你自己画吧”。帮我画一张地图吧,最好能标明我们要去的那几个地方和比较省时的路线啊,拜托了~ 2 问题的分析 2.1 对问题一的分析 问题一要求安排路线使得坐车花费的时间最少。 对于问题一,假设公交车的速度维持不变,要使花费的时间最少,则将问题转化为对最短路径的求解。求解最短路径使用Dijkstra算法很容易进行求解,在运用MATLAB编程,得到最优的一条路径,则这条路径所对应的时间即为最少用时。 2.2 对问题二的分析 问题二要求在考虑堵车的情况下,路口越密越容易发生拥堵,安排路线是乘车时间最短。 对于问题二,在问题的基础上增加了附加因素,即公交车的速度会因道路的密集程度而发生改变,从而问题一建立的基本Dijkstra算法对于问题二就不再适用了,因此对问题一的基本Dijkstra算法进行改进,并结合蚁群算法的机理与特点,运用MATLAB求解出最短路径,保证了花费时间的最少性。 2.3 对问题三的分析 问题三要求根据提供的附件,画出一张地图,标明要去的那几个地方和比较省时的路线。 对于问题三,在问题一和问题二的基础上,根据求解的结果,运用SPSS软件画出地图。
matlab机电系统仿真大作业
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
制造系统建模与仿真知识点2
知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统?
数学建模论文大作业-打车软件竞争问题
打车软件的竞争问题 班级:电子科学与技术1102班组员: 二零一四年五月
打车软件的竞争问题 摘要:随着打车软件的日趋火热,越来越多的出行者使用打车软件预约出租车。基于移动互联网的打车软件相对于已往的传统的统一出租车电招平台庞杂的预定流程,显示出了很大的便捷优势,这种约车新形式服务正在悄然改变人们传统打车模式,它的新颖性、神奇性、创新性、高效性以及便利性在一定程度上迎合了人们现代化的生活方式。消费者每次使用打车软件预约出租车,被使用的软件公司都会给予司机和消费者相应的补贴,而且随着竞争的升级,补贴的力度越来越大。打车软件给一部分人带来了便捷,同时也带来了很多的社会问题,如拒载、爽约、空车不停等。正是这些争议性问题使得人们对这种新事物的出现产生一些疑虑。因此,国内一些城市开始对这类打车软件紧急进行“叫停”,使得目前这些打车软件的发展陷入迷茫状态。 本文通过建立科学的数学模型,论述了打车软件目前发展模式和存在的问题,并阐述了如何对打车软件进行安全管理与标准化的建议;同时,通过模型分析讨论了打车软件之间的竞争问题;最后指出打车软件企业需要不断地完善自己的软件产品,提高用户体验,使打车软件更符合出租车营运行业市场的需求。 关键词:打车软件;软件补贴;竞争;发展前景
一、打车软件市场发展状况 随着移动互联网的飞速发展,打车软件开始变得异常的火热,开始成为了越来越多的年轻时尚人士出行必备的工具。随着竞争的深入,各家打车软件公司依托于背后强大的母公司支撑和金元的后盾,开始了现金补贴的营销战略,消费者每次使用打车软件预约出租车,被使用的软件公司都会给予司机和消费者相应的补贴,而且随着竞争的升级,补贴的力度越来越大。如表1所示。 表1 补贴政策 时间事件 1月10日 嘀嘀打车软件在32个城市开通微信支付,使用微信支付,乘客车费立减10元、 司机立奖10元。 1月20日“快的打车”和支付宝宣布,乘客车费返现10元,司机奖励10元。 1月21日快的和支付宝再次提升力度,司机奖励增至15元。 2月10日嘀嘀打车宣布对乘客补贴降至5元。 2月10日快的打车表示奖励不变,乘客每单仍可得到10元奖励。 2月17日嘀嘀打车宣布,乘客奖10元,每天3次;北京、上海、深圳、杭州的司机每单奖10元,每天10单,其他城市的司机每天前5单每单奖5元,后5单每单奖10元。新乘客首单立减15元,新司机首单立奖50元。 2月17日支付宝和快的也宣布,乘客每单立减11元。司机北京每天奖10单,高峰期每单奖11元(每天5笔),非高峰期每单奖5元(每天5笔);上海、杭州、广州、深圳每天奖10单。 2月18日 嘀嘀打车开启“游戏补贴”模式:使用嘀嘀打车并且微信支付每次能随机获得 12至20元不等的补贴,每天3次。 2月18日快的打车表示每单最少给乘客减免13元,每天2次。 随之而来的是出租车行业的怪相:出租车司机的主要收入变成了软件公司的补贴,一个司机一个月保守的收入增加都在800~1800元;而消费者打车的费用也同样基本变由打车软件承担,有些短途的打车变成了免费甚至还赚钱。与此同时,问题和矛盾也出现了:不使用打车软件的消费者无法打到车,拒载、空车不停等投诉也比比皆是;司机开车时频频使用手机看打车软件,也产生了潜在交通
电力电子电路建模与分析考试题答案
1.推演单相全桥SPWM 逆变电路的动态模型 L E S 1S3 S 2S 4R L 非线性部分(开关网络)线性部分R 电感内阻 C 电路可看作两部分:线性部分→输出u 0,输入u i ;非线性部分(开关网络) →输出u i ,输入u r (调制波)。 分析:u i 有两种电平,当S 1、S 4导通时,u i =E ; 当S 2、S 3导通时,u i =-E ; ()12-=S E u i ???=导通时、 导通时、S S S S S 324101(1) 由于开关函数S 的存在,使得u i 的幅值变化不连续,故对上式取开关周期平均值; () ()t D S S E u i =-=,12(2) 假设采用如图所示规则采样,则D (t )可推导如下(设载波频率为f W ,对应周期为T W ): u r U tri T w /2Δt D (t ) 可得,()???? ??+=+=U u T t T t D tri r w w 12122?(3) 将(3)代入(2)有: ()()()U u E t D E S E u tri r i =-=-=1212(4) 即:U E u u tri r i = 可得调制器逆变桥输出u i 的开关周期平均值与输入u r 之间的传递函数为: ()()U E S U S U t r i r i = U i 与U o 之间是一个线性电路,不难得出其传递函数为:
()()()???? ??++???? ??++=++=R R s C R R L s LC Cs //R Ls R Cs //R s U s U L L L L i o 11211111 综上可得调制器输入u r 与逆变器输出u o 之间的传递函数为: ()()()()()()U E R R s C R R L s LC s U s U s U s U s U s U tri L L r i i o r o ???? ? ??++???? ??++=?=11211 2.以DC/DC 变换器输出稳定直流电压为例,画出控制系统的一般组成框图,说明对电力电子变换电路进行建模、并且线性化的主要目的何在? + -Gc (s ) PWM 调制v v ref +-Vin (t ) 补偿网络 DC/DC 变换器反馈控制系统 Gc (s )Gm (s )Gvd (s )H (s )Vref (s ) 误差信号E(s)Vc (s )d (s )Vo (s ) B (s ) 参考信号 控制系统组成框图 答:要满足系统的技术性能指标要求,取决于对控制器的良好设计(含补偿或校正环节)以及设计合适的反馈网络及其参数等,因此需要确切掌握控制器的控制对象的行为特征,即被控对象的数学模型 。 作为电力电子转换的电力电子装置,应用越来越广泛,电力电子装置要满足一定的性能指标,这就要进行系统设计,设计满足性能要求的控制器,这就要借助被控对象的数学模型,设计成满足要求的闭环系统,是系统达到稳准快高性能要求。同时对电力电子电路进行建模,还可以分析不同的电路参数对电路有怎样的影响,为更好地分析,设计做基础。 而电力电子变换电路具有强烈的非线性(开关元件),与线性系统不同,非线性系统性能与初始条件、工作状态、参量变化范围等等均有关联,难以有统一的数学分析方法,而经典控制理论中关于控制器的设计方法只适用于线性系统,所以,往往需进行线性化近似处理,得到线性化模型,然后按照线性设计方法进行设计。 3.根据开关元件的通、断对电力电子变换器进行分时分段数学描述,指出:按照这样的分段描述“数学模型”对变换器进行闭环系统PI 控制器设计可行吗?为什么?
《生产系统建模与仿真》教学大纲
《生产系统建模与仿真》教学大纲 (理论课程) 开课系(部):工程学院课程编号:010396 课程类型:专业课总学时:48 学分:3 适用专业:工业工程开课学期:2014-2015学年第一学期 先修课程:概率论与数理统计、C语言程序设计、系统工程导论 一、课程简述 《生产系统建模与仿真》是面向工程实际的应用型课程,是工业工程系的主导课程之一。学生通过本课程的学习能够初步运用仿真技术来发现生产系统中的关键问题,并通过改进措施的实现,提高生产能力和生产效率。 本课程具有较强的理论性,同时具有较强的实践性和应用性,能够有效增强学生的系统仿真理论基础,提高学生对系统仿真、分析工作的适应性,培养其开发创新能力。 本课程的教学目标是培养学生的设计能力、创新能力和工程意识。课程以制造型生产企业为核心,通过理论教学和实践环节相结合,阐述了离散事件系统建模与仿真技术在生产企业分析中的基本原理和方法。其容涉及计算机仿真技术在生产系统分析中的作用和原理、仿真软件的介绍,重点介绍排队系统、库存系统、加工系统以及输入、输出数据分析。本课程的目的是要求学生通过学习、课堂教育和上机训练,能了解如何运用计算机仿真技术模拟生产系统的布置和调度管理;并熟悉和掌握计算机仿真软件的基本操作和能够实现的功能;使学生了解计算机仿真的基本步骤。 二、课程要求 (一)教学方法 1、启发式课堂讨论 针对关键知识点、典型题和难题,通过教师提问,鼓励学生回答问题或请到讲台前做题,并请其他学生评判或提出不同的答案或不同的解决方法。目的是加强学生自主学习的能力和判断能力,培养主动思考的习惯,启发学生的探索精神。 2、重视在教学中加强知识演进的逻辑规律的讲解 提高学生的逻辑思维能力,培养学生分析问题、解决问题的能力。 3、加强计算机辅助设计、分析 将Flexsim仿真软件引入教学中。应用计算机辅助设计、分析,能方便的改变系统
系统建模与仿真课后作业
、系统、模型和仿真三者之间具有怎样的相互关系 答:系统是研究的对象,模型是系统的抽象,仿真通过对模型的实验以达到研究系统的目的。 、通过因特网查阅有关蒲丰投针实验的文献资料,理解蒙特卡罗方法的基本思想及其应用的一般步骤。 答:蒲丰投针实验内容是这样的:在平面上画有一组间距为a的平行线,将一根长度为L(L (1)实体流图 (2)活动循环图 、以第二章中图2-5所示的并行加工中心系统为对象,建立Petri 网模型。 3214所示Petri 网模型的运行过程,并将分析结果同例3-5相比较。 、任取一整数作为种子值,采用第三题中得到的随机数发生器生成随机数序列的前200项数据,并对其统计性能进行检验。 解:由第3题可得到一个随机数发生器: a=5 b=9 c=3 m=512 取种子值,生成的随机数序列前200项数据如下: n n 5000032458 4 t t P t P P P P t P (2)t3发 生后 t t P t P P P P t P (3)t2发 生后 (4)t1不能 发生 t t P t P P P P t P (5)t4发 生后 数学建模创新思维课大作业 一、使用MATLAB 求解一下问题,请贴出代码. 1. cos 1000x mx y e =,求''y >>clear >>clc >> syms x m; >> y=exp(x)*cos(m*x/1000); >> dfdx2=diff(y,x,2) dfdx2 = exp(x)*cos((m*x)/1000) - (m*exp(x)*sin((m*x)/1000))/500 - (m^2*exp(x)*cos((m*x)/1000))/1000000 >> L=simplify(dfdx2) L = -(exp(x)*(2000*m*sin((m*x)/1000) - 1000000*cos((m*x)/1000) + m^2*cos((m*x)/1000)))/1000000 2.计算22 1100x y e dxdy +?? >> clear >> clc; >> syms x y >> L=int(int(exp(x^2+y^2),x,0,1),y,0,1) L = (pi*erfi(1)^2)/4 3. 计算4 224x dx m x +? >> clear; >> syms x m; >> f=x^4/(m^2+4*x^2); >> intf=int(f,x) intf = (m^3*atan((2*x)/m))/32 - (m^2*x)/16 + x^3/12 >> L=simplify(intf) L = (m^3*atan((2*x)/m))/32 - (m^2*x)/16 + x^3/12 4. (10)cos ,x y e mx y =求 >> clear; >> syms x m; >> y=exp(x)*cos(m*x); >> L=diff(y,x,10); >> L=simplify(L) L = -exp(x)*(10*m*sin(m*x) - cos(m*x) + 45*m^2*cos(m*x) - 210*m^4*cos(m*x) + 210*m^6*cos(m*x) - 45*m^8*cos(m*x) + m^10*cos(m*x) - 120*m^3*sin(m*x) + 252*m^5*sin(m*x) - 120*m^7*sin(m*x) + 10*m^9*sin(m*x)) 5. 0x =的泰勒展式(最高次幂为4). >> clear; >> syms m x; >> y=sqrt(m/1000.0+x); >> y1=taylor(y,x,'order',5); >> L=simplify(y1) L = (10^(1/2)*(m^4 + 500*m^3*x - 125000*m^2*x^2 + 62500000*m*x^3 - 39062500000*x^4))/(100*m^(7/2)) 6. Fibonacci 数列{}n x 的定义是121,1x x ==12,(3,4, )n n n x x x n --=+=用循环语句编程 给出该数列的前20项(要求将结果用向量的形式给出)。 >> x=[1,1]; >> for n=3:20 Simulink仿真 根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初步得到图3动态结构图。 图3 根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线图4。 图4 可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的。 速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。 所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。我们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为。当然,这是需要时间和经验的。 校正后的动态结构图如图5所示 图5 校正后的输出转速曲线如图6所示 图六 电流环跟随性能仿真实验 如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。这就需要我们对电流环的跟随性能加以分析。将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。电流环模型如图7所示: 图7 通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响应。 [num,den]=linmod('current_loop') sys=tf(num,den) figure(1) margin(sys) [mag,phase,w]=bode(sys); [gm,pm,wcg,wcp]=margin(mag,phase,w) Figure(2) Nyquist(sys) Figure(3) Step(sys) 我们还可以得到以下的数据: gm = 4.2925 pm =47.7281 wcg =345.3056 cp =164.6317 剪切频率ωc=164.6317rad/s;相角相对裕度δ=47.7281°;-∏穿越频率ω g=345.3056rad/s 幅值相对裕度Lh=20lg(4.2925)=12.65dB 数学模型课程期末大作业题 要求: 1)选题方式:共53题,每个同学做一题,你要做的题目编号是你的学号mod52所得的值+1。(例如:你的学号为119084157,则你要做的题为mod(119084157,52)+1=50)。 2)该类题目基本为优划问题,要求提交一篇完整格式的建模论文,文字使用小四号宋体,公式用word的公式编辑器编写,正文中不得出现程序以及程序冗长的输出结果,程序以附录形式附在论文的后面,若为规划求解必须用lingo 集合形式编程,其它可用Matlab或Mathmatica编写。 3)论文以纸质文档提交,同时要交一份文章和程序电子文档,由班长统一收上来,我要验证程序。 1、生产安排问题 某厂拥有4台磨床,2台立式钻床,3台卧式钻床,一台镗床和一台刨床,用以生产7种产品,记作p1至p7。工厂收益规定作产品售价减去原材料费用之余。每种产品单件的收益及所需各机床的加工工时(以小时计)列于下表(表1): 表 到6月底每种产品有存货50件。 工厂每周工作6天,每天2班,每班8小时。 不需要考虑排队等待加工的问题。 在工厂计划问题中,各台机床的停工维修不是规定了月份,而是选择最合 适的月份维修。除了磨床外,每月机床在这6个月中的一个月中必须停工维修;6个月中4台磨床只有2台需要维修。扩展工厂计划模型,以使可作上述灵活安排维修时间的决策。停工时间的这种灵活性价值若何? 注意,可假设每月仅有24个工作日。 5、生产计划 某厂有4台磨床,2台立钻,3台水平钻,1台镗床和1台刨床,用来生产7种产品,已知生产单位各种产品所需的有关设备台时以及它们的利润如表所示: 台镗床,4月—1台立钻,5月—1台磨床和1台立钻,6月—1台刨床和1台水平钻,被维修的设备在当月内不能安排生产。又知从1月到6月份市场对上述7种产品最大需求量如表所示: 量均不得超过100件。现在无库存,要求6月末各种产品各贮存50件。若该厂每月工作24天,每天两班,每班8小时,假定不考虑产品在各种设备上的加工顺序,要求: (a)该厂如何安排计划,使总利润最大; (b)在什么价格的条件下,该厂可考虑租用或购买有关的设备。 34、瓶颈机器上的任务排序 在工厂车间中,经常会出现整个车间的生产能力取决于一台机器的情况(例如,仅有一台的某型号机床,生产线上速度最慢的机器等)。这台机器就称为关键机器或瓶颈机器。此时很重要的一点就是尽可能地优化此机器将要处理的任务计划。 新疆财经大学实验报告 课程名称:物流管理综合实验 实验项目名称:系统建模与仿真 学号: 2013104059 姓名:曾华艳 班级:物流管理11-1 指导教师:林秋平 2014年 6月 2日 新疆财经大学实验报告 《铁路局联通营业厅排队仿真分析实验报告》 一、实验目的 (一)通过对铁路局联通营业厅运作的观察,建立计算机仿真全过程,对营业厅运作进行数据采集、建模和仿真分析,为联通营业厅提出改进和优化方案的建议。 (二)通过这次实验活动,全面了解计算机仿真技术在物流领域、生产制造领域等离散事件系统中的应用,理解仿真技术如何辅助管理人员进行决策。 (三)通过分组合作的形式,提供一种系统仿真工作中常见的团队协作方式的实践体验,培养协调工作、共同完成任务的能力。 二、系统描述 人们进入联通营业厅,首先要通过取票系统拿到自己的号,先在等待区等待叫号系统报自己的号。一共有2个服务台,2个服务台同时工作,哪个服务台叫到几号,拿这个号码的人就去哪个服务台,叫号系统按顺序叫号,2个服务台叫号不会发生重复现象。我们组决定针对铁路局联通营业厅叫号排队办理业务的过程进行研究,因此我们采集了仿真模型相关数据。记录了每位顾客到达时间、等待时间和离开时间。将收集的数据整理,录入excel中,并计算出了顾客的到达时间间隔和被服务时间,再利用flexsim建立仿真模型进行仿真分析与优化。 三、小组分工 (一)本组成员 1.组长:曾华艳 2.组员:晁芙蓉、陈磊、阿尔孜姑丽、宗泽宁、张振恒 (二)小组分工 1.调查收集数据和模型优化:全体成员 2.数据录入:晁芙蓉、张振恒、阿尔孜姑丽 3.数据处理:宗泽宁、阿尔孜姑丽 4.仿真模型建立与分析:陈磊、曾华艳 5.实验报告:曾华艳、晁芙蓉、宗泽宁 6.PPT 制作:张振恒、陈磊 期末大作业题目 一、小行星的轨道问题 一天文学家要确定一颗小行星绕太阳运行的轨道,他在轨道平面内建立了以太阳为原点的直角坐标系,在两坐标轴上取天文观测单位。在5个不同的时间对 (1 ) 建立小行星运行的轨道方程并画出其图形; (2) 求出近日点和远日点及轨道的中心(是太阳吗?); (3) 计算轨道的周长。 二、发电机使用计划 为了满足每日电力需求(单位:兆瓦),可以选用四种不同类型的发电机。每日电力需求如下所示: 一最小输出功率。所有发电机都存在一个启动成本,以及工作于最小功率状态时的固定的每小时成本,并且如果功率高于最小功率,则超出部分的功率每兆瓦每小时还存在一个成本,即边际成本。这些数据均列于下表中。 电机不需要付出任何代价。我们的问题是: (1)在每个时段应分别使用哪些发电机才能够使每天的总成本最小? (2)如果增加表3中的关闭成本,那么在每个时段应分别使用哪些发电机才能够使每天的总成本最小? (3)如果增加表4中的关闭成本,那么在每个时段应分别使用哪些发电机才能够使每天的总成本最小? 三、合理计税问题 所以此人一年上税为: 245×12+11445=14385元 在实际的执行过程中,每月的岗位津贴和年末一次性奖金实际上是放在一起结算给个人的,而具体每月发放多少岗位津贴和年末一次性发放多少奖金可以由职工本人在年初根据自己的需要进行选择。显然,不同的选择发放方式所缴纳的税是不同的,这就产生一个合理计税的问题。假定该事业单位一年中的津贴与奖金之和的上限是160000元,试解决下面这个问题: 四、光伏电池的选购问题 早在1839年,法国科学家贝克雷尔(Becqurel)就发现,光照能使半导体材料的不同部位之间产生电位差。这种现象后来被称为“光生伏特效应”,简称“光伏效应”。1954年,美国科学家恰宾和皮尔松在美国贝尔实验室首次制成了实用的单晶硅太阳电池,诞生了将太阳光能转换为电能的实用光伏发电技术。据预测,太阳能光伏发电在未来会占据世界能源消费的重要席位,不但要替代部分常规能源,而且将成为世界能源供应的主体。 现有一家公司欲在面积为30平方米的一片向阳的屋顶安装光伏电池以解决部分电力紧张的问题。请你利用附件提供的数据通过建立数学模型解决下面三个问题: (1)如果该公司准备投资6万5千元购买A或者B两种类型的光伏电池,请你为该公司确定购买方案使得发电总功率最大。 (2)如果购买的光伏电池的开路电压之间的差不能超过2V,请你为该公司重新确定购买方案。 (3)实际中还要考虑电池串并联后并网发电的要求,即如果要购买两种或者两种类型以上的电池时,不同型号的电池的购买数量应该相等。请你在满足(1) 控制系统仿真大作业 1、曲线拟合的Matlab实现和优化度检验 通过一个实际的例子,介绍最小二乘曲线拟合法的基本原理,对最小二乘曲线拟合法的Matlab实现方法进行研究,并给出曲线拟合Matlab实现的源程序。论述了Matlab软件在做曲线拟合时的用法,并进行曲线的拟合和相应的图像。 2、基于Matlab的液位串级控制系统 运用组态王和Matlab混合编程的方法设计了一个双容(两个水箱串联)液位串级在线控制系统,由组态王编制人机交互界面,用Matlab完成控制算法,二者通过DDE进行实时数据交换;采用串级控制策略,减小二次干扰的影响,验证其方法的有效性。 3、基于Matlab的变压器差动保护闭环仿真研究 应用Matlab建立了微机保护仿真系统,并对不同原理的变压器差动保护进行了仿真和比较.仿真系统采用积木式结构,根据微机保护的实现原理构建模块,实现保护的闭环仿真,对保护的动作过程进行分析. 4、基于MATLAB/SIMULINK的交流电机调速系统建模与仿真 根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造了一个交流电机调速系统,该系统能够很好地模拟真实系统,实现高效的调速系统设计。仿真结果验证该方法的有效性。 5、基于MCGS和MATLAB的薄膜厚度控制系统仿真 以MCGS组态软件和MATLAB为平台,设计和仿真了一个薄膜厚度控制系统.MCGS完成硬件接口的设置、数据的实时采集、人机对话、以动画的方式显示控制系统的运行情况,MATLAB完成PID参数的自动整定,并利用动态数据交换(DDE)技术建立两者间的通讯.并分析其仿真结果。 6、Matlab在动态电路分析中的应用 用Matlab计算动态电路,可得到解析解和波形图.一阶电路先计算3要素,后合成解数学建模创新思维大作业
系统建模与仿真仿真作业结果
2015年数学建模作业题
曾华艳组离散事件系统仿真大作业
数学建模期末大作业-2013年
大作业题目