飞行器制导复习.doc
一、简答题
1.典型的制导体制有哪些?简述它们的工作原理。
(1)遥控制导
以设在飞行器外部的指控站或制导站,来完成飞行器运动状态的监控,或者进行目标与飞行器相对运动参数的测定,然后引导飞行器飞行的一种制导方式。
(2)自主制导
按照给定弹道生成预定导航命令或预定弹道参数信息,在发射或起飞前装订到无人飞行器的存储装置中,飞行过程中机载敏感装置会不断测量预定参数,并与存储装置中预先装订参数进行比较,一旦岀现偏差,便产生导航或导引指令,以操纵飞行器运动,完成飞行任务。这是一种自主导航或制导的方式。
(3)寻的制导
利用电磁波、红外线、激光或可见光等方式测量目标和无人飞行器之间的相对运动信息,由此实时解算出制导命令,从而导引无人飞行器飞向FI标的一种方式。
(4)复合制导
复合制导是指在飞行过程屮采用两种或多种制导方式。它可分为串联、并联和串并混合三种。串联复合制导就是在不同飞行弹道段上采用几种不同的制导方式;并联复合制导则是在整个飞行过程中或在某段飞行弹道上同时采用几种制导方式;而串并联混合制导就是既有串联复合也有并联复合的混合制导方式。
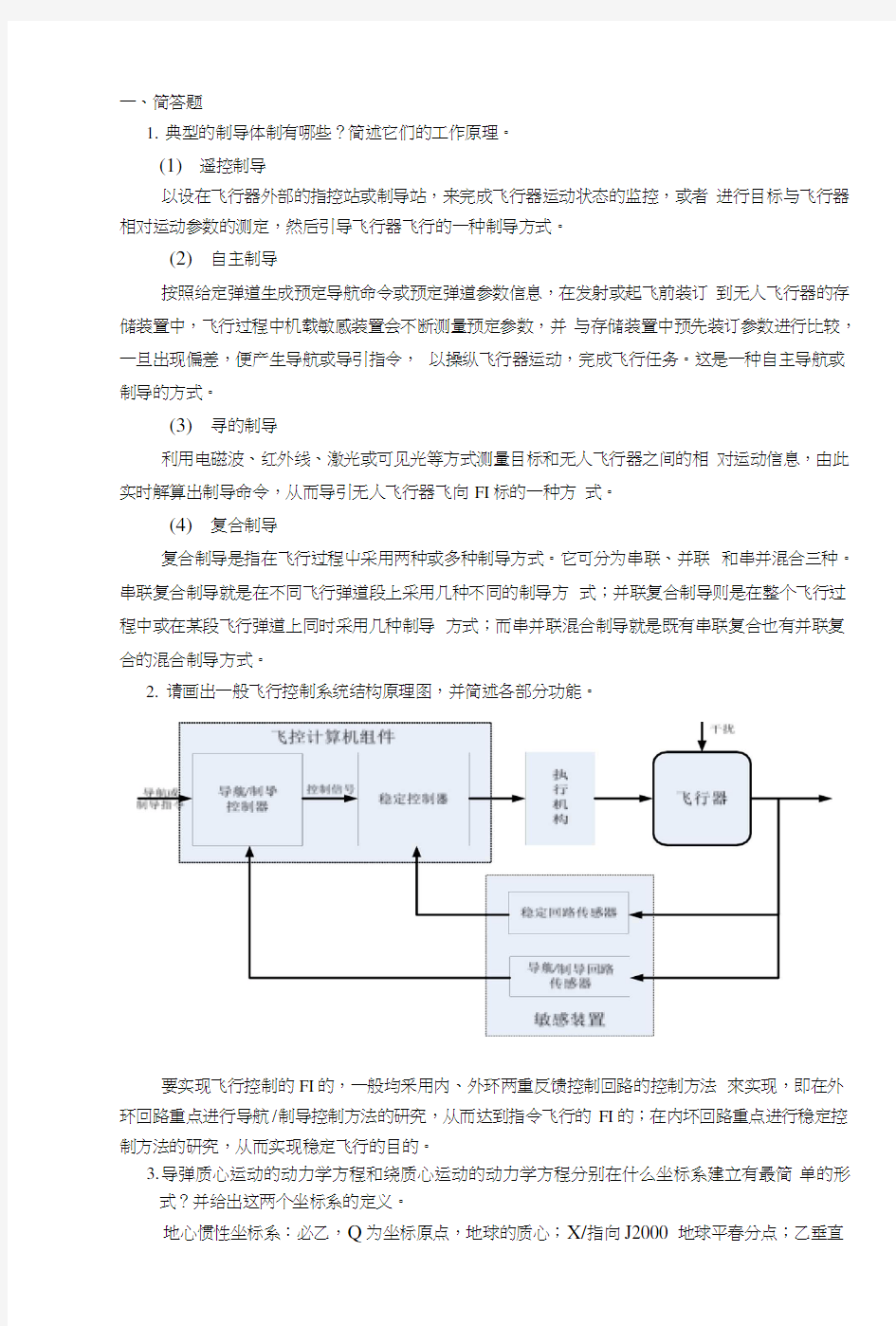
2.请画出一般飞行控制系统结构原理图,并简述各部分功能。
要实现飞行控制的FI的,一般均釆用内、外环两重反馈控制回路的控制方法來实现,即在外环回路重点进行导航/制导控制方法的研究,从而达到指令飞行的FI的;在内坏回路重点进行稳定控制方法的研究,从而实现稳定飞行的目的。
3.导弹质心运动的动力学方程和绕质心运动的动力学方程分别在什么坐标系建立有最简单的形
式?并给出这两个坐标系的定义。
地心惯性坐标系:必乙,Q为坐标原点,地球的质心;X/指向J2000 地球平春分点;乙垂直
于J2000地球平赤道面,指向北为正;在平赤道面内与X刃轴、轴形成右手旋转坐标系。
发射坐标系G:原点发射点o, x轴在发射水平面内指向瞄准方向,y轴垂直发射水平面指向上方,z轴构成右手坐标系。
4.大气层内飞行器所受力和力矩分别有哪些?产生控制力和控制力矩的方法有哪些?
(1)引力、重力
(2)发动机推力与推力矩
(3)空气动力与气动力矩
(4)控制力与控制力矩
①气流控制方式:利用舵而在气流中的偏转来产生控制力和控制力矩的方式,包括燃气舵、空气舵。
②推力矢量控制方式:利用改变推力矢量方向来产生控制力和控制力矩的方式,包括摆动发动机、喷管摆动、扰流等。
③直接推力控制方式/RCS:利用发动机直接提供控制力或控制力矩,包括冷喷发动机、可重复使用的液体发动机以及固体发动机组合等
5.简述比例导引的工作原理,说明导航比N的取值对制导性能的影响。
比例导引法:导弹速度矢量的旋转角速度与目标瞄准线的旋转角速度成比例。6何谓惯性坐标系?何谓相对坐标系?表达一个三轴坐标系相对于另一个三轴坐标系方向的方法通常有哪儿种?
惯系:是指不受外力作用的质点能在其中保持静止或作匀速直线运动的参考系。实际问题中选择某一参考体固连的坐标系为惯性参考系。
相对:
方法:直接投影法、旋转转换法、四元素法
7分析描述飞行器姿态运动常用的参考坐标系Z间的关系。
8—般制导导弹包含哪些部件?其寻的制导可以分为哪儿种类型?
9一般飞行器在大气层内飞行过程中受哪些力的作用?飞行器所受的儿种空气动力的详细定义式什么?
10比例导引中增大有效导航比N会出现哪些结果?
11画出导弹自动驾驶仪的典型构成。
12简述战略导弹中惯导系统的特点。惯性系统的三个基本元件是什么?
13开普勒三大定律是什么?牛顿三大定律是什么?
14导弹的静稳定性是什么?给出导弹静稳定性的判据。
15写出导弹姿态欧拉动力学方程?
二、名词解释:
1、导航:将运载体从起始点引导到目的地的技术或方法称为导航
2、制导与控制:根据实际运动轨迹与期望运动轨迹的偏差对运载体的运动状
态进行调整,以消除轨
迹偏差。
3、刚体:在任何力的作用下,体积和形状都不发生改变的物体。
4、自寻的制导:利用目标辐射或反射的某种特征能量(无线电波、红外线、激光、可见光、声波等)导引导弹飞向目标。
5、地心惯性坐标系:O.-X^乙,Q为坐标原点,地球的质心;£指向J2000 地球平春分点;乙垂直于J2000地球平赤道面,指向北为正;勒在平赤道面内与X也轴、轴形成右手旋转坐标系。
三、推导题
1、选择合适坐标系利用牛顿力学定律推导导弹线运动和转动动力学方程。(8分)
2、按照1?2?3的顺序推导发射坐标系到弹体坐标之间的转换矩阵和逆转换矩阵,两个坐标系之间的欧拉角为(p、y/、Y °
四、计算题
某运载火箭俯仰通道姿态运动线性化方程为
■
叨=C[Eh +C2E^
y+/?]?.+方2口+仇巧=0
Efy ? Eh
(1)写出俯仰通道状态方程;
(2)若在某一特征点上,各系数分别为
q =0.15, c2 =0.09, c3 =0.04
b、=0.02702 =? 0.0903 =0.68
求在短周期时(即A& =0)时,若俯仰舵摆角为為时Dz的稳态值。
五、设某模拟测量量变化范围为0. 001V-5V,如何选择A/D采样的分辨率和有效位?
六、导弹以750m/s的速度作倾角60度的爬升运动,此时遭遇到风速为45m/s的垂直阵风干扰,
求干扰引起的附加攻角。
七、某导弹纵向扰动运动的特征根为人2=-0?3士丿2.4 , ^4 =-0.003±>0.075 ,求纵向长短周期扰动运
动的振荡频率、振荡周期、阻尼比。
八、飞行器运动方程通常为复杂的非线性方程,因此在控制系统设计时需要进行线性化处理。请说
明线性化处理中需要的前提和假设有哪些?并对如下某飞行器运动方程中的关于速度的方程进行线性化处理,给出线性化后的方程。
? qS P
V = —— {-C A cos a cos 0 - C N sin a cos 0 + Cz sin 0) - g sin & + — cos a cos 0
m ‘m
(捉示:C A,C N,C Z为阻力、法向以及侧向力系数,为攻角和侧滑角。引入小偏差后,小量乘积为高阶无穷小,小量正弦值为其本身,小量余弦值为1,另外注意%0为小量。
九、某MEMS加速度计釆用六位置法标定,加速度计在个位置的三轴理论值及对应测量平均值如下
(1)给出该MEMS加速度计误差模型;
(2)计算出该加速度计误差模型中各标定系数。
10、己知某系统传递函数为G(s) = ——-——,给出其离散域传递函数和差分计算方程。分(s + d)(s
+ b)
析a^d对连续系统和数字系统稳定性的影响,并分析采样周期对数字系统的稳定性影响。
(提示:采用双线性变换5=-—)
T z + \
、已知系统开环传递函数为G O (5)= J'5 ,如何设计姿态反馈环节HZk'S + k?使系
s~ + s — 2
统幅值裕度>4dB,相位裕度>45度。
G°(s) ? H (s) = "\k\S + *2)- 2.5(禺'+ ' 2),
厂 + s — 2
k (/) 0 (Q Y
) = arctan (〔上)+ arctan( e 丫)+ arctan( k i
tan(arctan J'5)+ arc t an
( )+ arctan( k i
kg : | 3x kg : k. 2 Ik. J
, kg : k 、(o :
k 2 2 k 2 kg ; | 5 心 2 2k 2 2 宀 k y CD x = 2
+ k\
tan(arctan (—― ) + arctan( (o c ) + arctan( -------------- )) = tan( 一 180 ' + 45 °) k 7 2 ■ kg : | N kg : k2 2 2k 2
_ ]
! - kg : kg : | 曲 ~ k 2 2k 2 2 2.5 屁 + kjcoj Jl +(o c 2 J4 + co 12
2.5 加 + kj (D : J + 3: 丁4 + co : 2
r k r
= 2 + 丄 k\
1 c 、 2
c 、
1 小 2
1
E +
c
1 c
k 2 2 2仁
1 5
kg ; | 曲
k
2 2k 2 2 2.5屈
+ kg
Jl + co : * + co : k 、= -0.95,&2 = -0.167
($ — 1)心 + 2)
—(9)
亍)— -CO
))=tan( -180 °)
, 2.5 J 驚 + kjco J G 0(ja )x )-H (ja )x )\= V
; z
,=
V + V + s
k
0(e) = arctan( —~ ) + arctan( 69 .) + arctan(
k 2
k (f) — (0 —(!) 亍)—45。 G°(丿0)?丹(丿S )| =