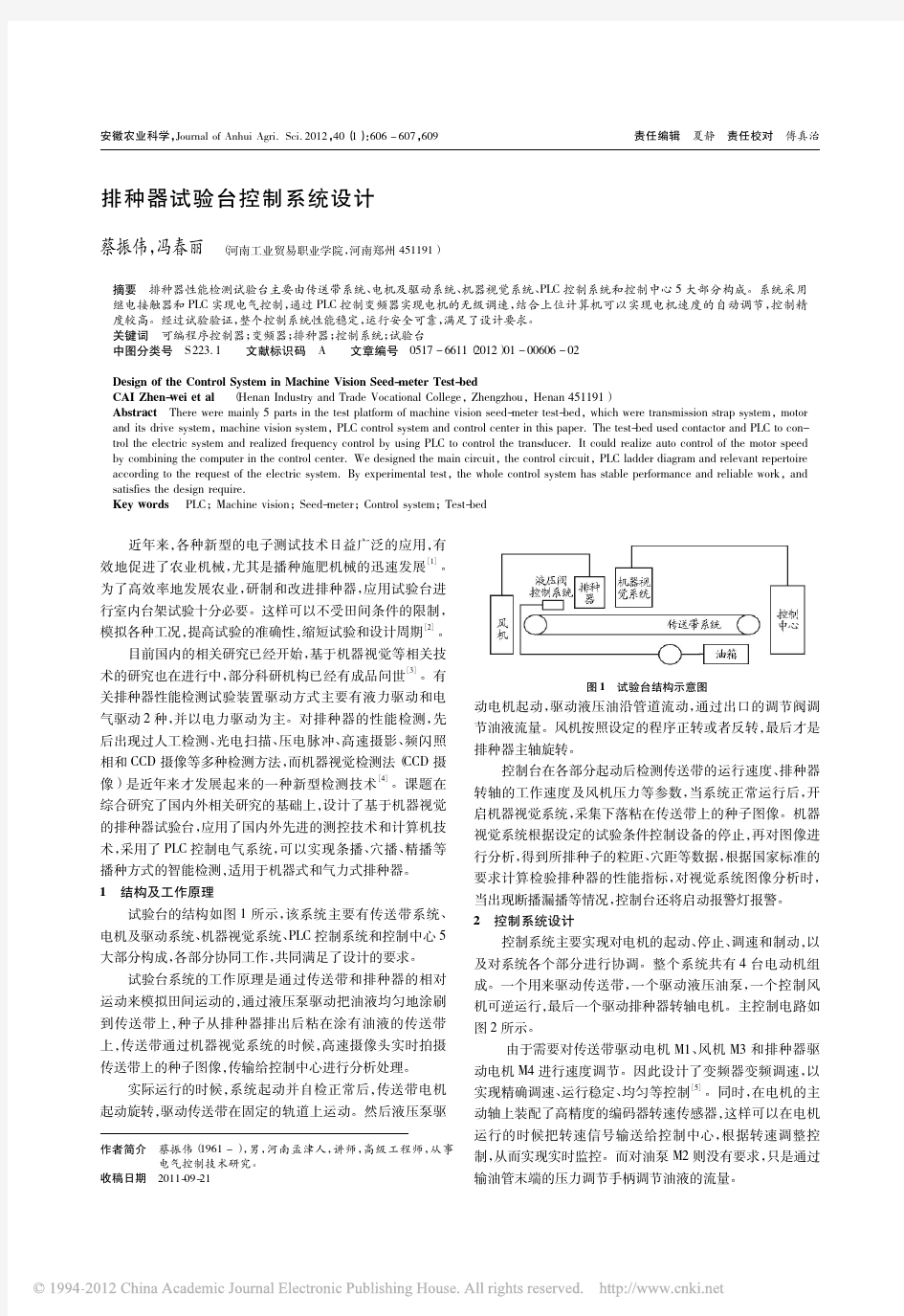
排种器试验台控制系统设计

智能装盘播种机精密播种监测系统的设计
图1 智能装盘播种机的结构 Fig.1Structure of intelligent plate planter 1.漂盘护栏 2.压辊 3.下料斗 4.点种斗 5.淋水斗 6.覆料斗 7.后加长架 8.电机链条护罩 9.控制面板10.电控盒11.保险座%12.装基电机13. 前加长架 DOI:中国农机化学报 Journal of Chinese Agricultural Mechanization 第35卷第6期2014年11月Vol .35No .6Nov.2014 智能装盘播种机精密播种监测系统的设计* 吉武俊,陈海燕 摘要:国内现行的烟草播种机多采用纯机械推板式播种器,其播种量无法控制,且漏种量高,控制性能差难以满足播种的要求。YZPB ― 200B 型智能装盘播种机采用步进电机驱动排种器,播种过程中采用霍尔转速传感器采集苗盘传送速度信号,并由单片机对采集数据进行分析和计算,动态调节步进电机转速,使排种器转速与苗盘传送速度保持一定的关系,从而达到自动控制排种器的目的;此外安装了监控系统对播种机的播种质量进行实时监控,提高了播种的质量。关键词:播种器;单片机;传感器;播种精度中图分类号:S223.2 文献标识码:A 文章编号:2095-5553(2014)06-0017-04 吉武俊,陈海燕.智能装盘播种机精密播种监测系统的设计[J].中国农机化学报,2014,35(6):17~20 Ji Wujun,Chen Haiyan.Design of the monitoring system for precision seeding in tobacco intelligent plate planter [J].Journal of Chinese Agricul -tural Mechanization,2014,35(6):17~20 (河南省职业技术学院,郑州市,450046) 收稿日期:2013年9月16日修回日期:2013年10月29日 *基金项目:河南省烟草公司科技公关项目(200831) 第一作者:吉武俊,男,1979年生,河北张家口人,硕士,讲师;研究方向为汽车应用技术教育。E-mail:mazhai920@https://www.360docs.net/doc/397234623.html, 0引言 播种器是播种机的核心部件,对播种质量起 决定性作用。目前我国烟草装盘播种多数地区仍采用手工或半机械化作业。传统播种机的播种器是依靠地轮驱动,当地轮阻力大时容易打滑,要想让播种器和地轮的前行速度保持一定的关系,达到精准播种,对其机械部分的设计要求很高,如果出现皮带松动等原因时,漏播率非常高。同时播种机工作时具有全封闭的特点,当播种机发生故障时由于没有及时发现,会造成断行性漏播,导致农业减产。YZPB ―200B 型智能装盘播种机将播种过程用三种传感器进行测点,单片机综合控制,让排种器转速与播种机作业速度一致,大大提高了播种 精度;为了防止断行性漏播,安装了监控系统对播种质量进行实时监控,提高了播种质量。 1智能装盘播种机的结构 烟草精量装盘播种机由机架、装基装置、压穴装 置、播种装置、淋水装置、覆基装置构成,如图1所示。其中机架是本产品的基础,主要完成传递动力及输送育苗盘的任务;装基装置主要作用是能够容纳一定的基质量,并向育苗盘的种穴内填充基质;压穴装置利用传动 V 带的摩擦力,使育苗盘在运行的状态下推动压穴装置, 使压穴装置被动上下运动,实现同步给育苗盘压窝;播种装置包括种子箱、排种器驱动步进电机、精量排种器,它的主要作用是通过两组传感器检测,给控制系统提供信号,单片机进行数字化控制,实现精确播种。 10.13733/j.jcam.issn.2095-5553.2014.06.005
抢答器PLC控制系统设计
抢答器PLC控制系统设计 摘要 抢答器广泛应用于各种知识竞赛中,传统的抢答器大部分都是基于数字电路组成的,制作过程复杂,可靠性差。本设计以松下PLC为核心设计了系统结构图、梯形图以及输入输出端子的分配方案,并在MCGS组态软件里进行监控界面的设计,达到了同步的要求。该设计通过数码管可以实现八路抢答选手编号显示、抢答倒计时和实际抢答时间显示,并实现锁存、定时和报警,同时所有选手抢答通过主持人开始和复位按钮来控制,该设计不仅电路简单,控制方便、灵活,而且保证了抢答的公平、公正原则。 关键词 松下可编程控制器;组态软件;抢答器
Responder PLC control system design Abstract Responder is widely used in a variety of knowledge contests, traditional Responder mostly digital circuits, the complexity of the production process, poor reliability. Panasonic PLC, the design as the core design of the system structure diagram, ladder, and the input and output terminals of the distribution plan, and monitoring interface design MCGS configuration software to achieve the synchronization requirements. The design can be achieved through the digital tube eight Responder player number, answer in the countdown and actual answer in time, and to achieve the latch, timer and alarm, all players Responder by Moderator start and reset buttons to control the design not only simple circuit easy to control, flexible, but also to ensure the answer in the fair and just principles. Keyword Panasonic PLC;MCGS;Responder 一、设计目的和意义
湖面清扫智能机器人的控制系统设计
湖面清扫智能机器人的控制系统设计 1、引言 机器人是上个世纪中叶迅速发展起来的高新技术密集的机电一体化产品,它作为人类的新型生产工具,在减轻劳动强度、提高生产率、改变生产模式,把人从危险、恶劣的环境下解放出来等方面,显示出极大的优越性。在发达国家,工业机器人已经得到广泛应用。随着科学技术的发展,机器人的应用范围也日益扩大,遍及工业、国防、宇宙空间、海洋开发、紧急救援、危险及恶劣环境作业、医疗康复等领域。进入21世纪,人们已经越来越切身地感受到机器人深入生产、深入生活、深入社会的坚实步伐。机器人按其智能程度可分为一般机器人和智能机器人。一般机器人是指不具有智能,只具有一般编程能力和操作功能的机器人;智能机器人是具有感知、思维和动作的机器人。所谓感知即指发现、认识和描述外部环境和自身状态的能力,如装配机器人需要在非结构化的环境中认识障碍物并实现避障移动,这依赖于智能机器人的感觉系统,即各种各样的传感器;所谓思维是指机器人自身具有解决问题的能力,比如,装配机器人可以根据设计要求为一部复杂机器找到零件的装配办法及顺序,指挥执行机构,即指挥动作部分完成这部机器的装配;动作是指机器人具有可以完成作业的机构和驱动装置。由此可见,智能机器人是一个复杂的软件、硬件综合体。 机器人的核心是控制系统。机器人的先进性和功能的强弱通常都直接与其控制系统的性能有关。机器人控制是一项跨多学科的综合性技术,涉及自动控制、计算机、传感器、人工智能、电子技术和机械工程等多种学科的内容。 近年来,随着工业和其它服务行业的蓬勃发展,人们在重视其经济效益的同时却往往忽略了他们对环境的污染,人类赖以生存的水资源也不例外。水面污染对人类的水源构成很大的威胁,湖泊尤其是旅游胜地和市内人工湖泊,更是无法逃避漂浮物污染的厄运,举目可见各种日常消费品的包装物在湖面上漂浮。污染的加剧根治水污染。但是,水面污染的治理是一项艰难的长期任务,是全人类必须面对的共同问题。用人工清理水面漂浮物只是权益之计,有些危险水域人无法工作。很多发达国家致力于水面污染治理设备的研究,如石油清理设备,但只是用于大量泄露石油的清理。目前,我国研制的清理水面漂浮物的设备还未见报道,国外研制的也不多,并且价格昂贵,实现的功能也不尽人意。因此,开发一种性
播种机播种质量检测预警系统
播种机播种质量检测预警系统 O 引言 随着农业机械化作业水平的提高,精播机在农业生产中得到了越来越广泛的应用。精量播种具有节约良种、减少拔苗对留苗的伤害;且省去了间、定苗等工序等优点。但是,现有的精量播种机在播种作业过程往往会出现重播、漏播现象以及粒距均匀性较差等问题,直接影响作物的产量。因此,有必要设计一种播种质量监控系统,以确保作业质量符合农艺技术要求。 目前,精播机的检测系统主要有光电型、电容型和基于机器视觉型3种,并以光电型应用居多。现有的检测系统虽做到了重播、漏播报警,但对播种均匀性研究较少,功能也相对单一。为此,以89C52单片机为核心、以光电传感器和霍尔开关传感器构成一个小型微机系统,当精播机出现排种器卡种、开沟器堵塞或者种子箱内无种时,显示故障位置并启动声光报警通知驾驶员;正常工作时,当某一行连续出现不合格粒距时,显示不合格的行数并声光报警;并可提供播种面积统计和应收费用服务信息。 1 设计思路 根据国标GB6973- 86《单粒(精密播种机试验方法)》的规定。按照不同作物的农艺要求,对行距进行设定。开始工作时,利用光电传感器检测下种时间间隔£i,速度传感器获取播种机工作速度,根据设定的行距值及速度传感器检测工作速度值,计算得到种子平均落粒时间间隔£。当£i在IO.75t-1.25tI区间内,为合格粒距所对应的时间,当fi在IO-O.75tl和I1.25£一∞]区间内,为不均匀播种所对应的时间。 2 系统的总体结构 本系统总体结构如图1所示,主要由主机、数据采集装置、显示和报警装置、键盘电路和传输电缆等组成。主机主要承担数据的采集、处理以及发出控制命令信号,当
反应器串级控制系统整定
西华大学课程设计说明书 目录 1 前言 (1) 2 总体方案设计 (2) 2.1 方案比较 (2) 2.2 方案选择 (5) 3 反应器串级控制系统分析 (6) 3.1 被控变量和控制变量的选择 (6) 3.2 主、副回路的设计 (6) 3.3 主、副控制器正、反作用的选择 (8) 3.4 控制系统方框图 (8) 3.5 分析被控对象特性及控制算法的选择 (9) 4 串级控制系统的参数整定 (10) 4.1 参数整定方法 (10) 4.2 参数整定 (11) 4.3 两步法的整定步骤 (12) 5 MATLAB仿真 (14)
5.1 控制系统的MATLAB仿真 (14) 5.2 串级控制系统PID参数整定: (16) 5 结论 (20) 6 总结与体会 (21) 7 参考文献 (22) 1 前言 反应器(或称反应釜)是化工生产中常用的典型设备,种类很多。化学反应器在结构、物料流程、反应机理、传热、传质等方面存在差异,使自控的难易程度相差很大,自控方案差别也比较大。 夹套式反应器是一类重要的化工生产设备,由于化学反应过程伴有许多化学和物理现象以及能量、物料平衡和物料、动量、热量和物质传递等过程,因此夹套反应器操作一般都比较复杂,夹套反应器的自动控制就尤为重要,他直接关系到产品的质量、产量和安全生产。 化工生产过程通常可划分为前处理、化学反应及后处理三个工序。前处理工序为化学反应做准备,后处理工序用于分离和精制反应产物,而化学反应工序通常是整个生产过程的关键,因此在化学反应工序中设计一套比较完善的控制系统是很重要的。 设计夹套式反应器的控制方案应从质量指标,物料平衡和能量平衡,约束条件三个方面考虑(假设在本反应器中反应物为一般性的,无腐蚀,无爆炸的液液反应物)。
抢答器的PLC控制系统设计样本
课程设计任务书 课程设计名称: 可编程序控制器应用技术 设计题目: 抢答器的PLC控制系统设计 设计依据、要求及主要内容: 一、实验目的 1、掌握PLC电气控制系统的设计方法。 2、掌握PLC电气系统的设计、调试方法。 二、实验设备 1、 PLC——Ⅲ型可编程控制台。 2、编程器。 3、实验导线。 4、控制要求的其它外围设备。 三、设计内容 ( 一) 控制要求 设计供4组参赛队伍进行抢答的控制系统, 有数字显示和声音提示, 并设有答题时间控制。 1、参赛者只有在主持人按下开始抢答按钮后再开始抢答才有效, 否则按 抢答器按钮或一直按着抢答器按钮不放, 均不起作用。 2、在抢答时显示最先抢到的一组的组号, 扬声器响一声, 其它组均被封 锁。 3、每道答题在规定的时间10S内完成, 超时则自动取消答题资格, 显示
器数字显示0并报警一声。 4、答题完成后由主持人结束答题, 即复位, 显示器数字回到0。( 二) I/O分配 输入: X0主持人开始抢答按钮SB0 X11主持人结束抢答按钮SB11 X1第一组抢答按钮SB1 X2第二组抢答按钮SB2 X3第三组抢答按钮SB3 X4第四组抢答按钮SB4 输出: Y0扬声器控制信号 Y1个位数字a段控制信号 Y2个位数字b段控制信号 Y3个位数字c段控制信号 Y4个位数字d段控制信号 Y5个位数字e段控制信号 Y6个位数字f段控制信号 Y7个位数字g段控制信号 ( 三) 设计要求 1、画出PLC的输入输出设备的接线图; 2、使用经验设计法完成梯形图、指令表的程序设定;
3、完成程序的仿真调试和模拟试验; 4、完成设计说明书。 目录 1概述 (3) 2方案确定 (4) 3硬件参数设计 (4) 3.1 PLC的选型 (6)
机器人控制系统设计(毕业设计)文献综述
一、前言 1.课题研究的意义,国内外研究现状和发展趋势 1.1课题研究的意义 随着机器人在工业装配线的应用越来越广泛,工业环境对其控制系统的要求也越来越高,所以开放式机器人控制系统的设计具有工程实际意义。 课题以一四自由度关节型机器人研制为背景,设计机器人运动控制系统的硬件电路和软件结构,对机器人的运动控制电路进行设计,实现机器人按照预定轨迹或自主运动控制功能。 在机械工业中,应用机械手的意义可以概括如下: ①以提高生产过程中的自动化程度 应用机械手有利于实现材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。 ②以改善劳动条件,避免人身事故 在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其他毒性污染以及工作空间狭窄的场合中,用人手直接操作是有危险或根本不可能的,而应用机械手即可部分或全部代替人安全的完成作业,使劳动条件得以改善。 ③可以减轻人力,并便于有节奏的生产 应用机械手代替人进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续的工作,这是减少人力的另一个侧面。因此,在自动化机床的综合加工自动线上,目前几乎都没有机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产 随着机器人技术的发展,机器人应用领域的不断扩大,对机器人的性能提出了更高的要求,因此,如何有效地将其他领域(如图像处理、声音识别、最优控制、人工智能等)的研究成果应用到机器人控制系统的实时操作中,是一项富有挑战性的研究工作。而具有开放式结构的模块化、标准化机器人,其控制系统的研究无疑对提高机器人性能和自主能力,推动机器人技术的发展具有重大意义。 1.2国内外研究现状和发展趋势 随着机器人控制技术的发展,针对结构封闭的机器人控制器的缺陷,开发“具有开放式结构的模块化、标准化机器人控制器”是当前机器人控制器的一个发展方向。近几年,日本、美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构、网络功能的机器人控制器。我国863计划智能机器人主题也已对这方面的研究立项。 由于适用于机器人控制的软、硬件种类繁多和现代技术的飞速发展,开发一个结构完全开放的标准化机器人控制器存在一定困难,但应用现有技术,如工业PC
喷漆机器人控制系统方案设计
喷涂机器人控制系统初步方案 一、控制系统组成框图 本控制系统采用了以PC104为核心,以步进电机驱动网为低层控制通道的开放式控制器。下图是整个控制系统的组成框图。
二、PC104模块选型 采用PC104是因为它有如下特点:结构小巧紧凑, 仅96 mm ×90 mm面积内集成了PC 机所有功能;采用自栈接的母线结构,级联牢固,易于扩充;整机功耗低;兼容性好,可以借鉴PC机成熟技术;外设丰富,应用简单。 本控制系统PC104模块选用研华PCM-3343F。其组成如下:核心模块DM&P V ortex86DX 的高性能低功耗CPU 模块,CPU 速度1.0 GHz,带有浮点运算单元,在板集成了256MB DDR2 SDRAM(最大可支持512MB)、显示控制器(支持LCD显示,最高分辨率为1024×768),以太网控制器等。带有PA TA硬盘接口1个,PC104扩展插槽1个,KB/MS插槽1个,USB2.0接口4个,16位GPIO口,RS-232接口3个,RS-232/422/485接口1个。 选择该嵌入式主板时,应注意: 1)购买时,要求将系统内存升级到512MB; 2)购买时,要求配齐以下配件: ①键盘及鼠标的接口线共2根(编号及图片如下); p/n: 1703060053p/n: 1700060202 ②VGA接口线1根(编号及图片如下); p/n: 1700000898
③US B×2接口线1根(编号及图片如下); p/n: 1703100260 ④RS-232×2接口线1根(编号及图片如下); p/n: 1701200220 ⑤RS-422/485接口线1根(编号及图片如下);p/n: 1703040157 ⑥IDE接口线1根(编号及图片如下); p/n: 1701440350 ⑦外接Li电池1个(编号及图片如下); p/n: 1750129010
排肥器试验台智能控制系统研究与研发设计
随着精细农业的发展,精量施肥作为精细农业的重要组成部分,其对施肥装置性能的要求也越来越高。排肥器性能试验是农机测试的重要组成部分,也是研制和开发新型精量排肥器不可缺少的重要环节。但是,排肥器大多是做为播种机的一部分来进行研究,没有专门用来检测排肥器性能的试验台。为此,本论文拟开发一种操作简单、性能可靠、运行速度快的排肥器试验台智能控制系统。 农业是人类赖以生存的基础产业。加快农业技术进步、提高农业产品产量和质量是各个国家努力的方向。施肥对于粮食增产、农业增收以及保持土壤肥力等方面起到了积极作用,人们已经认识到保持土壤肥力对作物产量的重要性。但是,大量化学肥料以各种形式投入到土壤中,也造成了环境压力。施用化肥,尤其是精量深施化肥,则是提高单产、节约用肥的关键措施之一。国外对此己有较多的研究,如美国玉米种植带的统计。目前,中国已经成为世界上最大的化肥生产国。近30年来,中国化肥消费总量和单位面积用量都已经达到世界前列。中国小麦、玉米和水稻施肥量与其他国家相比还是比较高,但产量相对较低。化肥的施用自然应使其能有效地被农作物吸收,否则不仅会造成不可低估的直接损失和间接失,而且达不到预期的增产效果。施肥机械性能也关系到配方施肥技术进一步发展,恰当的施肥机械可让配方施肥技术发挥出更加有效的作用。在我国,化肥施用以粮食作物为主,在50%左右。与推荐施肥量相比,部分作物氮肥、磷肥施用过量,但钾肥用量仍需增加。因此,应把发展节能增效的施肥机械作为农业机械化发展的重要课题。化肥深施的意义有四:第一,化肥深施会减少化肥分子挥发。如铵态氮肥、尿素等化肥较浅地施入土壤后,铵态氮在土壤表层中,易被硝化细菌转化成硝态氮,土壤胶体不能吸。铵态氮肥深施后,由于土壤下层硝化细菌极少,不易被硝化细菌转化为易流失挥发的硝态氮而存在土壤之中来被作物所吸收。第二,可以减少肥分子的流失。比如,硝态氮化肥施入土壤较浅,其中硝酸根离子不能被土壤胶体所吸附,分散在土壤颗粒之间。有些土壤本身对化肥的吸附、保蓄能力本身就很差,要是遇暴雨或灌溉,化肥的有效分子便会随水或随土壤表层泥一起流失,会使化肥效果明显降低,从而作物的的产量就要下降。而化肥深施后,由于土壤下层水移缓慢,随水流失就会大大减少,这样才能有效地被作物所吸收。第三,深施化肥可减轻作物后期早衰。例如晚茬水稻和低肥田所种作物,其生育后期常因养料缺乏而早衰。化肥深施后,有利于供应作物生育中、后期的养料,延长作物功能叶片的生命活力和叶绿素含量,增强光合作用能力,有利于夺取高产。第四,化肥的深施能增强作物抗逆性。作物根系都有趋肥性,要是化肥的浅施,会使作物根系大多集中在土壤表层,要是有大风暴雨,则有可能作物要倒伏。并且也不具有抗旱的作用。化肥的深施后,能够吸引作物根向土壤下层深扎,从而大大增强作物抗倒伏、抗旱能力。化肥深施,是提高肥料利用率的重要措施,并且是我国节本增效的重点工程之一。但是深施化肥要借助性能优良的施肥机械才能得以实现,而施肥机械又是我国农业机械发展中的一个薄弱环节。根据多年的实践证明:机械深施碳酸氢铵、尿素、氮的利用率比人工表面撒施分别由27%和37%提高到58%和50%,深施比表施其利用率相对提高11.5%和35%。。然而,由于目前我国施肥机械技术的不成熟,造成化肥施用上的极大浪费。据有关资料介绍:目前我国氮肥当季利用率仅为30%-35%,磷肥利用率仅为15%-20%,钾肥利用率也不超过65%。化肥流失加剧了湖泊和海洋等水体的富营养化,造成地下水和蔬菜中硝态氮含量超标,影响土壤自净能力。农业面临污染对人类健康的影响不容忽视,据调查,累积于饮用水源特别是井水中的化肥氮磷和农药对至少13个省份、数以百万计居民的健康构成威胁。因此,研制性能良好、适用性强的施肥机械是我国农机工作者当务之急应解决的问题之一。农业机械作为现代农业生产重要的组成部分,其产品质量的优劣直接影响农业机械的作业效率,关系到农业增产和农民增收,也关系到农机使用者的健康和安全。排肥器作为施肥机械的主要部件,其性能指标是否达到标准直接影响着施肥机械产品改进、完善和性能质量的提高,施肥机械制造企业科学、合理的技术创新和经营决策,广大农民用户的生产投入是否有针对性,施肥
反应釜温度过程控制课程设计
过程控制系统课程课题:反应釜温度控制系统 系另I」:电气与控制工程学院 专业:自动化_____________ 姓名: ________ 彭俊峰_____________ 学号:__________________ 指导教师: _______ 李晓辉_____________ 河南城建学院 2016年6月15日
反应器是任何化学品生产过程中的关键设备,决定了化工产品的品质、品种和生产能力。釜式反应器是一种最为常见的反应器,广泛的应用于化工生产的各个领域。釜式反应器有一些非常重要的过程参数,如:进料流量(进料流量比)、液体反应物液位、反应压力、反应温度等等。对于这些参数的控制至关重要,其不但决定着产品的质量和生产的效率,也很大程度上决定了生产过程的安全性。 由于非线性和温度滞后因素很多,使得常规方法对釜式反应器的控制效果不是很理想。本文以带搅拌釜式反应器的温度作为工业生产被控对象,结合PID 控制方式,选用FX2N-PLC 调节模块,同时为了提高系统安全性,设计了报警和紧急停车系统,最终设计了一套反应釜氏的温度过程控制系统。
1系统工艺过程及被控对象特性选取 被控对象的工艺过程 本设计以工业常见的带搅拌釜式反应器(CSTR)为过程系统被控对象。 反应器为标准3盆头釜,反应釜直径1000mm,釜底到上端盖法兰高度1376mm, 反应器总容积,耐压。为安全起见,要求反应器在系统开、停车全过程中压力不超过。反应器压力报警上限组态值为。反应器的工艺流程如图1-1所示。 S8Q A a珑厲娜口 图1-1釜式反应器工艺流程图 该装置主要参数如表1-1所示。各个阀门的设备参数如表1-2所示,其中,D g为阀门公称直径、K v为国际标准流通能力。 表1-1主要测控参数表
抢答器PLC控制系统课程设计
) 抢答器PLC控制系统设计 一、抢答器PLC电气控制系统设计任务书 1.抢答器工艺的技术要求 实用抢答器的这一产品是各种竞赛活动中不可缺少的设备,无论是学校、工厂、军队还是益智性电视节目,都会举办各种各样的智力竞赛,都会用到抢答器。目前市场上已有的各种各样的智力竞赛抢答器绝大多数是早期设计的,只具有抢答锁定功能的一个电路,以模拟电路、数字电路或者模拟电路与数字电路相结合的产品,这部分抢答器已相当成熟。现在的抢答器具有倒计时、定时、自动(或手动)复位、报警(即声响提示,有的以音乐的方式来体现)、屏幕显示、按键发光等多种功能。但功能越多的电路相对来说就越复杂,且成本偏高,故障高,显示方式简单(有的甚至没有显示电路),无法判断提前抢按按钮的行为,不便于电路升级换代。本设计要求就是利用PLC作为核心部件进行逻辑控制及信号的产生,用PLC 本身的优势使竞赛真正达到公正、公平、公开。 2.抢答器电气控制系统设计要求 1)抢答器同时供8名选手或8个代表队比赛,分别用8个按钮S0 ~ S7表示。 2)设置一个系统清除和抢答控制开关S,该开关由主持人控制。 3)抢答器具有锁存与显示功能。即选手按动按钮,锁存相应的编号,并在LED数码管上显示,同时扬声器发出报警声响提示。选手抢答实行优先锁存,优先抢答选手的编号一直保持到主持人将系统清除为止。 ~ 4)抢答器具有定时抢答功能,且一次抢答的时间由主持人设定(如30秒)。当主持人启动"开始"键后,定时器进行减计时,同时扬声器发出短暂的声响,声响持续的时间秒左右。 5)参赛选手在设定的时间内进行抢答,抢答有效,定时器停止工作,显示器上显示选手的编号和抢答的时间,并保持到主持人将系统清除为止。 6)如果定时时间已到,无人抢答,本次抢答无效,系统报警并禁止抢答,定时显示器上显示00。 二、抢答器PLC电气控制系统总体设计过程 (二)系统设计要求及工作原理 1.设计要求 (1)抢答器同时为8组选手分别提供按钮,按钮分别为 PB0、PB1、PB2、PB3、PB4、PB5、PB6、PB7; (2)设置一个复位按钮PB10,实现系统电路的复位,由 主持人控制; (3)当主持人打开启动开关SW1后,在设定时间T0内, 如果某组抢先按下抢答按钮,则驱动音效电路①发出声响, 指示灯L1亮,并且在8段数码管显示器(如图1所示)上显 示出抢答成功的组号,此时电路实现互锁,其它组再按下抢 答按钮为无效; (4)如果在时间T0内,无人应答,则驱动音效电路② 发出声响,指示灯L2亮,表示抢答者均放弃该题;
化学反应器自动控制系统设计
目录 摘要.............................................................................................................................III 1 关于化学反应 (1) 2 关于化学反应器 (2) 2.1 反应器的类型 (2) 2.2 反应器的性能指标 (2) 2.3 反应器的控制要求 (2) 3 反应器的控制方案 (4) 3.1 反应器常用的控制方式 (4) 3.2 温度被控变量的选择 (5) 3.3 控制系统的选择 (6) 4 反应器串级系统的控制原理 (9) 4.1 系统方框图 (9) 4.2 系统原理分析 (9) 5 反应器的部分实现 (11) 5.1 原料的比值控制 (11) 5.2 仪器仪表的选择 (12) 6 设计总结与展望 (13) 参考文献 (14)
化学反应器自动控制系统设计 1 关于化学反应 化学反应的本质是物质的原子、离子重新组合,使一种或者几种物质变成另一种或几种物质。化学反应过程具备以下特点: 1) 化学反应遵循物质守恒和能量守恒定律。因此,反应前后物料平衡,总热量也平衡; 2) 反应严格按反应方程式所示的摩尔比例进行; 3) 化学反应过程中,除发生化学变化外,还发生相应的物理等变化,其中比较重要的有热量和体积的变化; 4) 许多反应应需在一定的温度、压力和催化剂存在等条件下才能进行。 此外,反应器的控制方案决定于化学反应的基本规律: 1.化学反应速度 化学反应速度定义为:单位时间单位容积内某一部分A 生成或反应掉的摩尔数,即 t A A Vd dn r 1± = (1-1) 若容积V 为恒值,则有 dt dC dt V dn r A A A ±=± =/ (1-2) 式中 r A ——组分A 的反应速度,mol/m 3·h ; n A ——组分A 的摩尔数,mol ; C A ——组分A 的摩尔浓度,mol/m 3; V ——反应容积,m 3。 2.影响化学反应速度的因素 实验和理论表明,反应物浓度(包括气体浓度,溶液浓度等)对化学反应速度有关键作用。温度对化学反应速度影响较为复杂,最普遍的是反应速度与温度成正比。而对于气相反应或有气相存在的反应,增大压力(压强)会加速反应的进行。化学反应还受催化剂,反应深度等因素的影响,这些都是要在设计反应器是需要考虑的。
电子抢答器控制系统的设计 -
抢答器控制系统的设计 院系: xxx 姓名:xxx 学号:xxx 专业:xxx 指导教师:xxx 成绩评定:
此次设计采用AT89C51单片机为核心控制元件,设计一个简易的抢答器,本方案以AT89C51单片机作为主控核心,与MAX232、发光二极管、数码管、蜂鸣器等构成硬件操作,再利用C语言编程,来控制抢答器的功能实现。本设计的系统实用性强、判断精确、操作简单、扩展功能强。 关键字:STC89C52单片机、动态显示、中断 1
摘要 (1) 1 系统方案总体设计 (4) 1.1控制芯片 (4) 1.2数据显示 (4) 1.3原理框图 (4) 2 系统硬件设计 (5) 2.1 AT89C51的组成及管脚介绍 (5) 2.2 电路设计 (7) 2.2.1 抢答器电路 (7) 2.2.2 发声电路 (8) 2.2.3 开始、复位按键输入电路的设计 (8) 2.2.4 时钟振荡电路 (9) 2.2.5 设定时间、加减时间电路 (9) 2.2.6 显示电路 (10) 3 系统程序设计 (11) 3.1 抢答器工作流程 (11) 3.2 流程图 (11) 4 Proteus仿真设计 (12) 4.1 利用Proteus仿真软件建立系统仿真模型 (12) 4.2 开始抢答 (12) 4.3 非法抢答 (13) 2
4.4 正常抢答 (13) 参考文献 (14) 附录 (14) 3
1 系统方案总体设计 1.1控制芯片 采用51系列单片机AT89C51作为控制核心,该系统可以完成运算控制、信号识别以及显示功能的实现。单片机技术比较成熟,应用起来方便、简单并且单片机周围的辅助电路也比较少,便于控制和实现。整个系统具有极其灵活的可编程性,能方便地对系统进行功能的扩张和更改。 MCS-51单片机特点如下:a、可靠性好:单片机按照工业控制要求设计,抵抗工业噪声干扰优于一般的CPU,程序指令和数据都可以写在ROM里,许多信号通道都在同一芯片,因此可靠性高,易扩充。b、单片机有一般电脑所必须的器件,如三态双向总线,串并行的输入及输出引脚,可扩充为各种规模的微电脑系统。c、控制功能强:单片机指令除了输入输出指令,逻辑判断指令外还有更丰富的条件分支跳跃指令。1.2数据显示 在实现基本功能时,我们采用了四位数码管显示,后两位显示倒计时时间,第一位显示抢答组号,第三位置空,在此基础上还在程序里加了更改抢答时间和倒计时时间的模块,也可通过数码管显示,成为一个比较完整的系统。 1.3原理框图 图1-1 原理框图 4
六自由度机器人控制系统设计
1前言 1.1 焊接机器人的发展历史与现状 现代机器人的研究始于20世纪中期,其技术背景是计算机和自动化的发展,以及原子能的开发利用。美国原子能委员会下属的阿尔贡研究所为解决可代替人进行放射性物质的处理问题,在1947年研制了遥控式机械手臂;1948年又相继开发了电气驱动式的主从机械手臂,从而解决了对放射性物质的进行远距离操作的问题。1954年,美国科学家戴沃尔最先提出工业机器人的概念,并申请了新的专利。其主要特点是借助伺服技术来控制机器人的关节,并利用人手对机械手臂进行动作示教,机械手臂能实现人物动作的记录和再现。这就是示教再现机械臂,现在所用的机械手臂差不多都采用这种控制方式。伴随着现代社会的发展,为了提高生产效率,稳定和提高产品的质量,加快实现工业生产机械化,改善工人劳动条件,已经大大改进了机械手臂的性能,并大量应用于实际生产中,尤其是在高压、高温、多粉尘、高噪音和重度污染的场合。焊接机器人的诞生可以追溯到上世纪70年代,是由日本发那科(FANUC)公司生产的小型机器人改进的,受限于当时的技术手段以及高昂的造价,使得当时的焊接机器人不能得到很好的应用。机械手臂是一种工业机器人,它由控制器、操作机、检测传感装置和伺服驱动系统组成,是一种可以自动控制、仿人手操作、可以重复编程、可以在三维空间进行各种动作的自动化生产设备。机械手臂首先是在汽车制造工业中使用的,它一般可进行焊接、上下料、喷漆以及搬运。它可代替人们进行从事繁重、单调的重复劳动作业,并且能够大大改善劳动生产率,提高产品的质量[1]。 到了90年代初,随着计算机技术、微电子技术、网络技术等的快速发展,机器人技术也得到了飞速发展。工业机器人的制造水平、控制速度和控制精度、可靠性等不断提高,而机器人的制造成本和价格却不断下降。在西方国家,由于劳动力成本的提高为企业带来了不小的压力,而机器人价格指数的降低又恰巧为其进一步推广应用带来了契机,采用机器人的利润显然要比采用人工所带来的利大,使得焊机机器人得到了推广,同时技术的进步也使得焊机机器人技术得到很大提高。 进入新世纪之后,由于各国对焊接机器人的不断重视,使得焊接机器人技术取得了很大的进步。同时由于其焊机精度及更低的生产成本,也使得它得到了越来越多的应用。目前,焊接机器人主要用于装卸、搬运、焊接、铸锻以及热处理等方面,无论数量、品种和性能方面都还不能满足工业生产发展需要。在一些特殊的行业,使用它来代替人工操作的,主要是在危险作业、多粉尘、高温、噪声、工作空间小等的不适于人工作业的环境。 1.2 焊接机器人发展趋势
抢答器控制系统设计
摘要 可编程序控制器(PLC)是一种新型的通用的自动控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,其拥有功能强大、编程简单、使用方便以及体积小、重量轻、功耗低等一系列优点。 本文采用日本三菱公司生产的FX2N型PLC作为核心控制器进行五路抢答器系统的设计,设计了系统结构图、程序指令、梯形图以及输入输出端子的分配方案,在保留了原始抢答器的基本功能的同时又增加一系列的实用功能并简化其电路结构,其将以其控制方便,灵活,只要改变输入PLC的控制程序,便可改变竞赛抢答器的抢答方案,从而使得竞赛不断完善其公平、公正性。 在实时检测和自动控制的PLC应用系统中,PLC往往是作为一个核心部件来使用。本设计正是以PLC为核心,该系统可以实现多人抢答和违例报警的自动显示。由于PLC具有可靠性、易操作性、灵活性等优点,故传统答题相比,大大提高了效率和可靠性,有很强的实用价值。 关键词:PLC;竞赛抢答器
目录 1 引言................................................................. 错误!未定义书签。 1.1 设计目的 (1) 1.2 设计意义 (1) 1.3 设计内容及要求 (1) 2 PLC控制系统硬件设计 (3) 2.1 系统硬件配置及组成原理 (3) 2.2 系统输入输出点分析 (4) 2.3 PLC选型 (4) 2.4 系统硬件接线图设计 (5) 3 PLC控制系统软件设计 (6) 3.1 系统I/O地址分配 (6) 3.2 控制程序流程图设计 (6) 3.3 控制程序时序图设计 (7) 3.4 PLC控制程序设计 (8) 4 上位机组态监控系统设计 (11) 4.1 组态监控软件选择 (11) 4.2 上位监控系统组态设计 (11) 4.3 实现效果 (12) 5 系统调试及结果分析 (11) 5.1 系统仿真调试 (11) 5.2 结果分析................................................... 错误!未定义书签。 6 设计总结 (11) 参考文献 (16) 附录控制程序梯形图 (17)
排种器试验台的结构改进
排种器试验台的结构改进
机械电气工程学院本科毕业设计(论文)题目:排种器试验台的结构改进设计 院(系): 专业: 学号: 姓名: 指导教师: 完成日期:
摘要 精密播种机性能试验是农机测试的重要组成部分,也是研制和开发新型精密播种机不可缺少的重要环节。虽然田间试验可以客观、准确地反映机具的性能,但由于受地点、季节、设备等因素的影响,试验周期长,费用高。因此,播种机尤其是以排种器作为主要工作部件的试验通常是在实验室内进行,以加快试验进程,提高试验的方便性、可靠性和可重复性。对排种器试验台进行优化,是为了使排种器在实验室内能够更好地模仿在田间试验和作业的各种情况,以便将其调试到最适宜的工作状态,提高生产效率。 排种器是播种机的核心部件,排种器的排种性能好坏直接影响播种机的工作性能。排种器实验台是对排种器性能测试的主要手段,测试过程可以不受田间各种条件的限制,人为地创造各种工况,达到实际工作中的田间仿真,并且对排种器的性能及各主要参数进行深入广泛地试验研究,并提供可靠的设计依据。 关键词:精量播种排种器试验模拟
Abstract Precision seeding agricultural performance test is an important part of the test as well as research and development of new precision seeder indispensable essential.Although the field experiment can be objectively and accurately reflect the performance of machinery,but because of the location,season,equipment and other factors,long test cycle,the high cost.Therefore,the planter in particular as the main working parts of the metering device in the laboratory test is usually carried out in order to expedite the trial process,to improve the convenience of test,reliability and repeatability.Metering device to improve the test-bed is to enable the metering device in the laboratory to better mimic in the field testing and operation of the various situations in order to debug the most appropriate working conditions and boost production efficiency. Planter metering device is the core component,metering device performance of the seed planter a direct impact on performance. Test metering device metering device is the main means of performance tests,the testing process can not field a variety of conditions,artificially creating a variety of working conditions on the performance of seed-metering device and the main parameters in-depth and extensive pilot study and provide a reliable basis for the design. Keywords:Precision seeding Seed-metering Test Simulation
机器人分布式控制系统设计与实现
机器人分布式控制系统设计与实现 1引言 目前,机器人系统的特点是开放式机器人控制,强调结构化、模块化、 可扩展性、交互性,是对机器人设计结构单一、信息封闭、缺少交互性缺点的突破。分层分布式控制系统采用集中管理,分散控制方式,这种控制方法优点体 现在:集中监控和管理,管理和现场分离,管理更加综合化和系统化;实现分 散控制可使各功能模块的设计、装配、调试以及维护相互独立,系统控制的危 险性分散,可靠性提高,投资减小;采用网络通信技术,可根据需要增加以微 处理器为核心的功能模块,具有良好的系统开放性、扩展性和升级特性。 本论文详细介绍了一种分层分布式控制系统的设计方案,系统由上到下分 为主控中心决策层、车载PC运算层、下位机驱动子层以及位置反馈子层。主 控中心决策层是系统的主层,可以是台式机或笔记本电脑,基于VC++编译环 境设计的人机交互界面,满足友好、便于操作的要求,主控中心决策层的功能 是总体规划和分配任务,对机器人进行远程监控;车载PC运算层为一台笔记 本电脑,基于VC++编译环境设计了控制界面,通过无线网卡与主控中心决策 层进行数据传输,采用面向连接可靠的TCP传输控制协议,保证数据传输的可 靠性;下位机驱动子层和位置反馈子层是相互独立的功能模块,与车载PC运 算层之间通过串口进行通信;下位机驱动子层是一个完整的直流电 机闭环控制系统,包括CPU、控制芯片、驱动芯片以及增量式光电编码器;位置反馈子层通过CPU的I/O口和中断得到机器人车轮轴转角信息,结合机器 人机械系统的实际尺寸计算机器人中心的实际位置信息,处理好的位置信息通 过串口反馈给车载PC运算层。该控制系统应用在国家自然科学基金资助项目 和国家重点基础研究发展计划973项目的移动机器人平台上,运动控制测试结 果表明,分层分布式控制方式控制精度高,稳定性好,系统响应迅速;同时该 控制系统具有超强的计算能力和二次开发潜力,根据项目研究需要可在各个子 层进行分布式扩展,比如在下位机驱动子层和位置反馈子层的同级层中扩展传 感器功能子层,增加机器人的智能。该控制系统为项目的实验工作奠定基础。 2分层分布式控制系统设计 1. 基于VC++的主控中心决策层设计 主控中心决策层的作用是总体规划和分配任务,对机器人进行远程监控。 基于VC++编译环境,采用模块化方法对人机交互系统进行设计,分为网络数 据传输模块、运动参数输入模块、轨迹显示模块、视觉监控模块。如图