应用Bernese软件进行高精度GPS定位解算_张彩红

文章编号:1007 3817(2006)03 0008 02中图分类号:P228.42 文献标志码:B 应用Bernese软件进行高精度GPS定位解算
张彩红1 朱 波2 张 黎2
(1武汉大学GPS工程技术研究中心;2武汉大学测绘学院,武汉市珞喻路129号,430079)
摘 要 介绍了高精度的G PS处理软件Bernese的组成、特点以及使用技巧,通过实例说明了BP E完全可以满
足高精度GP S数据自动处理的需要。
关键词 Ber nese;BPE;全球定位系统;基线解算;网平差
Ber nese软件是由瑞士伯尔尼大学天文研究所研究开发
的GP S数据(包括GL ON A SS数据、G PS和G L ON A SS混合
数据、SL R数据)处理软件。在2004年12月推出的5.0版
本,主要针对大学、研究机构和高精度的国家测绘机构等用
户,其界面更加友好,模块条理更为清晰,并且对非差模型作
了较大改动,使其精度更高。Bernese软件既可用非差方法
进行精密单点定位,又可用双差方法进行整网平差。而且它
能对GPS数据和G L ON A SS数据同时处理。其中BP E具有
自动处理功能且满足GP S高精度定位应用。该软件大约由
1000个数据处理程序和100个菜单程序组成,包括1000个
子程序和函数,其程序语言是FO RT R AN77、Per l等,个别
程序用FO RT R AN90编写。
1 Bernese GPS软件的主要操作步骤
Bernese GPS软件利用精密星历进行数据处理时,通常
可以进行数据文件的准备、解算过程的准备和基线处理。
1)数据文件的准备。A T M文件夹下载相关的电离层
文件(.ION),OR B文件夹下载相关的极文件(.ERP)、码偏
差文件(.DCB)以及精密星历(.SP3),O RX文件夹存放原始
数据(.RIN EX),ST A文件夹存放板块文件(.P LD)、站点信
息(.ST A)、IG S参考坐标(.CRD)、IGS参考速率(.V EL)以
及海潮文件(.BL Q)。
2)解算过程的准备。Bernese软件是高精度数据处理
软件,因此,在解算过程中应考虑多种不良因素的影响,如电
离层和对流层改正、海洋潮汐运动的影响以及钟差改正等。
卫星轨道误差对基线的影响如表1所示。
表1 卫星轨道误差对基线的影响
相对精度(10-7)D r/m b/km D b/m m
1020 12
1010 100100 10001000 101 10010 1000100
卫星轨道误差对基线的影响的计算公式是D r/r=D b/ b,其中,D r是卫星轨道误差,即星历误差;r是卫星到地面的距离20200km;D b是基线误差,即由于卫星星历误差而引起的基线误差;b是基线长度。实践证明,经数小时观测后基线的相对误差约为星历相对误差的1/4左右。在 SA 措施实施中,基线相对误差可能会增大,但就广播星历而言,也能保证1~2 10-6D的相对定位精度。
3)基线处理。GP S定位主要是描述地面点的位置,其一般都是建立与某一个特定的空间基准和时间基准上的,工程上所用的是以若干地面点为基准得到的以地心为坐标原点并固定在地球表面的大地测量坐标系统,这对于地球动力学的研究来说精度是远远不及的。而G PS测量所采用的坐标系统是固定于地球的,即地心地固坐标系。因此,也选择了由国际地球旋转服务IT RS提供的国际地球参考框架IT RF,到目前为止已经发展了IT RF88,89,90,91,92,93, 94,96,97,IT RF00等坐标框架。
对于大区域的高精度定位必须利用高精度的卫星轨道信息即精密星历。精密星历是国际I GS机构根据全球的各个IGS跟踪站的精密资料计算出来的卫星的精密位置,并且含有各颗卫星的钟差,可以通过国际互联网下载。当所有的数据都准备完毕,只用打开菜单,选中 Start BP E Pr ocess ,然后一步一步地处理就会得到如意的结果。不过在运行BP E的过程中,计算机的CP U会出现占用100%的现象,属于正常现象。如果手工要处理很多数据,那将是一件很麻烦的事情。BP E省时省力,并且效率高。
2 Bernese软件的组成及特点
1)Bernese软件的组成。界面部分用C++编写,程序部分用FOR T RA N77和90编写,BPE部分用P erl编写。BP E 是满足GPS数据高度自动处理的独立模块。最初,设计BP E的主要目的是满足日益增多的全球永久G PS站的解算,却得到了意想不到的效果,有经验的用户不仅用它处理永久GP S站的数据,也用它来处理其他GP S数据。
采用C/S(服务器/客户端)的设计模式,用户和服务端通过T CP/IP协议进行交流;服务器端用C++开发,BPE服务端流程图如图1所示。
客户端用Per l开发,并且能适用于各种操作系统,如Window s、U nix操作系统等,在W indo ws平台下,DOS批处理文件不再支持,必须用Perl编写脚本。
BP E可以用交互模式和非交互模式两种模式来运行。在非交互模式中,在U nix系统中只用输入命令 cr on 就可以启动该模块。
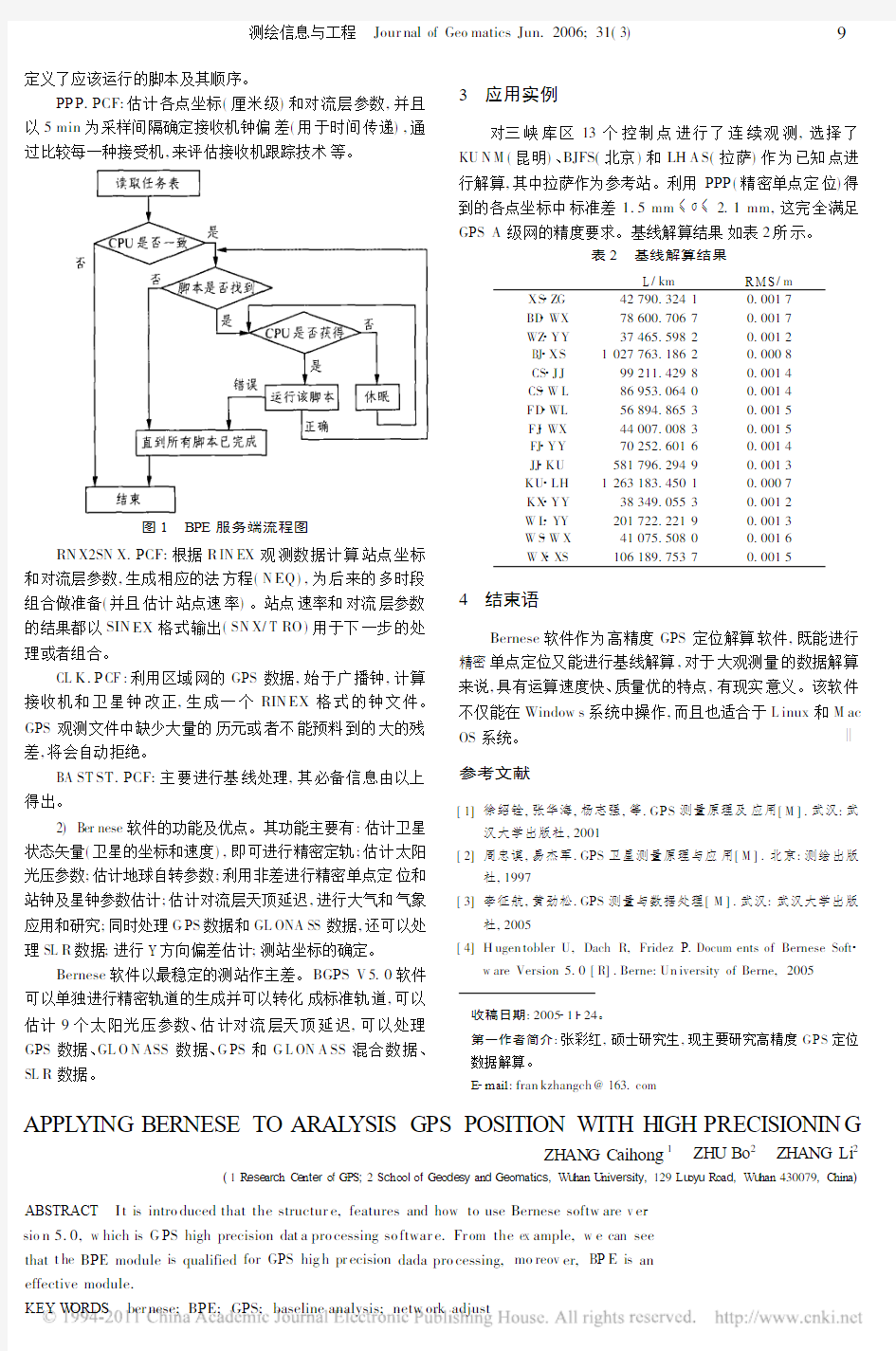
BP E有最主要的四个PCF(Pr ocess Co ntr ol F ile)文件,
8测绘信息与工程 Jour nal of Geo matics Jun.2006;31(3)
定义了应该运行的脚本及其顺序。
PP P.PCF:估计各点坐标(厘米级)和对流层参数,并且以5min 为采样间隔确定接收机钟偏差(用于时间传递),通过比较每一种接受机,来评估接收机跟踪技术
等。
图1 BPE 服务端流程图
RN X2SN X.PCF:根据R IN EX 观测数据计算站点坐标和对流层参数,生成相应的法方程(N EQ ),为后来的多时段组合做准备(并且估计站点速率)。站点速率和对流层参数的结果都以SIN EX 格式输出(SN X/T RO )用于下一步的处理或者组合。
CL K.P CF :利用区域网的GPS 数据,始于广播钟,计算接收机和卫星钟改正,生成一个RIN EX 格式的钟文件。GPS 观测文件中缺少大量的历元或者不能预料到的大的残差,将会自动拒绝。
BA ST ST.PCF:主要进行基线处理,其必备信息由以上得出。
2)Ber nese 软件的功能及优点。其功能主要有:估计卫星状态矢量(卫星的坐标和速度),即可进行精密定轨;估计太阳光压参数;估计地球自转参数;利用非差进行精密单点定位和站钟及星钟参数估计;估计对流层天顶延迟,进行大气和气象应用和研究;同时处理G PS 数据和GL ONA SS 数据,还可以处理SL R 数据;进行Y 方向偏差估计;测站坐标的确定。
Bernese 软件以最稳定的测站作主差。BGPS V 5.0软件可以单独进行精密轨道的生成并可以转化成标准轨道,可以估计9个太阳光压参数、估计对流层天顶延迟,可以处理GPS 数据、GL O N ASS 数据、G PS 和G L ON A SS 混合数据、SL R 数据。
3 应用实例
对三峡库区13个控制点进行了连续观测,选择了KU N M (昆明)、BJFS(北京)和LH A S(拉萨)作为已知点进行解算,其中拉萨作为参考站。利用PPP (精密单点定位)得到的各点坐标中标准差1.5mm 2.1mm,这完全满足GPS A 级网的精度要求。基线解算结果如表2所示。
表2 基线解算结果
L /km
R M S /m XS ZG
42790.32410.0017BD WX 78600.70670.0017WZ YY 37465.59820.0012BJ XS 1027763.18620.0008CS J J 99211.42980.0014CS W L 86953.06400.0014FD WL 56894.86530.0015FJ WX 44007.00830.0015FJ YY 70252.60160.0014JJ KU 581796.29490.0013KU LH 1263183.45010.0007KX YY 38349.05530.0012W L YY 201722.22190.0013W S W X 41075.50800.0016W X XS
106189.753
7
0.0015
4 结束语
Bernese 软件作为高精度GPS 定位解算软件,既能进行精密单点定位又能进行基线解算,对于大观测量的数据解算来说,具有运算速度快、质量优的特点,有现实意义。该软件不仅能在Window s 系统中操作,而且也适合于L inux 和M ac OS 系统。
参考文献
[1]徐绍铨,张华海,杨志强,等.GPS 测量原理及应用[M ].武汉:武
汉大学出版社,2001
[2]周忠谟,易杰军.GPS 卫星测量原理与应用[M ].北京:测绘出版
社,1997
[3]李征航,黄劲松.GPS 测量与数据处理[M ].武汉:武汉大学出版
社,2005
[4]H ugen tobler U,Dach R,Fridez P.Docum ents of Bernese Soft
w are Version 5.0[R].Berne:Un iversity of Berne,2005
收稿日期:2005 11
24。第一作者简介:张彩红,硕士研究生,现主要研究高精度GPS 定位
数据解算。
E mail :fran kzhangch @https://www.360docs.net/doc/4313928925.html,
APPLYIN G BERN ESE TO ARALYSIS G PS POSITION WITH H IGH PR ECISIONIN G
ZH AN G C aihong 1 ZH U Bo 2 ZHANG Li 2
(1R ese arch C e nte r o f GPS;2Sch o ol of Ge o de sy a n d Ge oma tics,Wu h an U niversity,129Lu o yu R o ad ,Wu h an 430079,C hin a)
ABSTRACT I t is intro duced that the structur e,features and how to use Bernese softw are v er sio n 5.0,w hich is G PS high precision dat a pro cessing so ftwar e.Fr om the ex ample,w e can see that t he BPE module is qualified for GPS hig h pr ecision dada pro cessing,mo reov er,BP E is an effective module.
KEY W ORDS ber nese;BPE;GPS;baseline analysis;netw ork adjust
9
测绘信息与工程 Jour nal of Geo matics Jun.2006;31(3)
GPS基线解算的优化及平差的方法技巧
GPS数据处理 GPS基线解算的优化及平差的方法技巧 摘要:对影响GPS基线解算质量的主要因素进行分析和研究,结合实例阐明基于南方GPS后处理软件的GPS基线解算的优化技术和方法。以及对GPS 解算数据平差处理的方法与技巧。 关键词:GPS基线解算;固定解;浮动解;残差曲线;优化,数据传输、数据分流、观测数据的平滑、滤波、平差计算、同步环、异步环、重复基线。GPS接收机采集记录的是GPS接收机天线至卫星的伪距、载波相位和卫星星历等数据。GPS数据处理就是从原始观测值出发得到最终的测量定位成果,其数据处理过程大致可划分为数据传输、格式转换(可选)、基线解算和网平差以及GPS网与地面网联合平差等四个阶段。 181
GPS测量数据处理的流程如图所示。 GPS测量数据处理流程 一、引言 根据GPS外业观测和基线数据处理的实际情况,即使通过选取恰当的点位来保证良好的观测条件,进行星历预报来保证观测到的卫星数目及星座的图形强度,但在实际的基线解算过程中,时常会遇到基线只有浮动解而无固定解。在此情况下,对基线解算进行优化处理后通常能够得到固定解,从而提高基线质量,避免或减少返工重测现象。 二、影响GPS基线解算结果的几个因素及其对策 182
影响GPS基线解算质量的因素较多也较为复杂,如卫星的周跳、星历误差、对流层及电离层影响、多路径误差、无线电干扰、不明因素影响及起算点误差过大等都会影响基线解算。 应对措施 1基线起点坐标不准确的应对方法 要解决基线起点坐标不准确的问题,可以在进行基线解算时,使用坐标准确度较高的点作为基线解算的起点,较为准确的起点坐标可以通过进行较长时间的单点定位或通过与WGS-84坐标较准确的点联测得到;也可以采用在进行整网的基线解算时,所有基线起点的坐标均由一个点坐标衍生而来,使得基线结果均具有某一系统偏差,然后,再在GPS网平差处理时,引入系统参数的方法加以解决。 2卫星观测时间短的应对方法 卫星整周模糊度难以确定的影响。由于个别或少数卫星观测时间太短,而导致这些卫星的整周模糊度难以准确确定。对于参与解算的卫星,其整周模糊度不能确定,必将对这一组同步观测的基线解算带来影响。 对于卫星观测时间过短,是非常容易识别的,因观测时间短,则观测记录的数据量就会小。解算基线时观察卫星相位跟踪图,能直观地看到观测到的各颗卫星的出、没时间。当基线无固定解时,在基线报告中可以看到各颗卫星的整周模糊度及其误差。若某颗卫星的观测时间太短,则可以删除该卫星的观测数据,不让它们参加基线解算,这样可以保证基线解算结果的质量。 183
第六章GPS基线解算
第六章 GPS 基线解算 第1节 G PS 基线解算的基本原理 GPS 基线向量表示了各测站间的一种位置关系,即测站与测站间的坐标增量。GPS 基 线向量与常规测量中的基线是有区别的,常规测量中的基线只有长度属性,而GPS 基线向量则具有长度、水平方位和垂直方位等三项属性。GPS 基线向量是GPS 同步观测的直接结果,也是进行GPS 网平差,获取最终点位的观测值。 一、 观测值 基线解算一般采用差分观测值,较为常用的差分观测值为双差观测值,即由两个测站的原始观测值分别在测站和卫星间求差后所得到的观测值。双差观测值可以表示为下面的形式: n m f f trop ion f f N dd dd dd v dd ,)()()()(?+++=+λρρρφ 其中: (...)dd 为双差分算子(在测站i ,j 和卫星m ,n 间求差); )(f dd φ为频率f 的双差载波相位观测值; f v 为频率f 的双差载波相位观测值的残差(改正数); ρ为观测历元t 时的站星距离; ion ρ为电离层延迟; trop ρ为对流层延迟; f λ为频率f 的载波相位的波长; n m f N ,为整周未知数。 若在某一历元中,对k 颗卫星数进行了同步观测,则可以得到k -1个双差观测值;若在整个同步观测时段内同步观测卫星的总数为l 则整周未知数的数量为l -1。 在进行基线解算时,ion ρ和trop ρ一般并不作为未知参数,而是通过某些方法将它们消除1。因此,基线解算时一般只有两类参数,一类是测站的坐标参数1 ,3C X ,数量为32;另一 1 如用模型改正或双频改正。 2 在基线解算时将基线的一个端点的坐标作为已知值固定,解求另一个点。固定的点称为起点,待求的点
全球卫星导航定位行业分析报告
全球卫星导航定位行业分析报告 一、全球卫星发展概况 卫星导航定位技术指利用全球卫星导航定位系统所提供的位置、速度及时间信息对各种目标进行定位、导航及监管的一项新兴技术。与传统的导航定位技术相比,由于卫星导航定位技术具有全时空、全天候、连续实时地提供导航、定位和定时的特点,已成为人类活动中普遍采用的导航定位技术。因此,全球卫星导航定位系统一经问世,在市场需求的牵动下很快就深入到各国军事、安全、经济领域的方方面面,使航空、航海、测绘、机械控制等传统产业的工作方式发生了根本的改变,开拓了移动位置服务等全新的信息服务领域,并迅速发展成为一个新兴的产业——卫星导航定位产业。 以美国GPS为代表的卫星导航定位产业已经成为当今国际公认的八大无线电产业之一。在人类信息社会中,有80%以上的信息与“位置”和“时间”有关,在卫星导航定位技术出现以后,它可以迅速将位置、时间信息数字化,进入互联网和各行各业的信息应用系统,被人们所使用。 目前世界上投入正式运行的卫星导航定位系统有美国的GPS系统、俄罗斯的Glonass系统和我国的北斗卫星导航定位系统。其中GPS的应用最为广泛,占到全球应用的95%以上。鉴于民用需求的巨大与旺盛,为了摆脱对美国GPS系统的依赖,打破美国对全球卫星导航产业的垄断,欧盟在2002年提出建设Galileo 系统,俄罗斯则计划在2010年全面恢复Glonass系统,我国在2006年对外公布建设我国新一代北斗卫星导航定位系统,卫星导航定位产业步入了一个多系统并存、多技术融合的发展新阶段。 我国的卫星导航定位应用是在全球卫星导航定位系统逐步开放、透明的大环境下,通过学习、引进、消化、吸收再创新的方式发展起来的。美国的GPS系统在20世纪80年代建设初期是一个严加保密的纯军事系统。随着全球政治格局和经济一体化的发展,其已从最初的“军用为主、民用为辅”发展到“强军护民、以民养军”的新阶段。美国GPS政策的每一次开放调整,都有力地推动了本国及全球卫星导航定位产业的市场发展。随着卫星导航定位在我国应用领域的不断拓展和深入以及自主的北斗卫星导航定位系统的建设,使我国在卫星导航定位系统技术和导航信号处理技术、卫星导航定位芯片技术和板卡、高精度接收机产品等方面取得重大突破,积累了应用经验,卫星导航定位技术与产品已呈现自主创新,集成创新,引进、消化、吸收再创新的多元并举发展的格局。 二、全球卫星导航系统发展历程 GPS可以说是最早也是目前最为完善成熟的全球卫星导航定位系统,最为当今最完善、覆盖率最高卫星导航定位,GPS的发展历程就代表了全球卫星导航定位行业的发展。 1、50年代末至60年代末是GPS研发的初级积累阶段 1958年底,美国海军武器实验室委托霍布金斯大学应用物理实验室,研究为美国军用舰艇导航服务的卫星系统,即海军导航卫星系统。60年代末,美国在此基础上着手研制新的卫星导航系统,以满足海陆空三军和民用部门对导航越来越高的要求。
基线解算
GPS 基线解算阶段的关键问题
黄 勇
【摘要】:本文简述了在 GPS 静态定位测量中基线解算的质量控 制指标,详细分析了影响 GPS 基线解算结果的主要因素,给出了 判别这些因素方法, 并对如何消除这些因素的影响提出了相应的 处理措施。
GPS 基线解算阶段的关键问题
GPS 基线解算阶段的关键问题
黄 勇
【摘要】:本文简述了在 GPS 静态定位测量中基线解算的质量控制指标,详细分 析了影响 GPS 基线解算结果的主要因素,给出了判别这些因素方法,并对如何消 除这些因素的影响提出了相应的处理措施。 【关键词】:GPS 基线解算 质量控制 因素 措施
GPS 静 态 定 位 在 测 量 中 主 要 用 于 测 定 各 种 用 途 的 控 制 点 。 其 中 较 为 常 见 的 方 面 是 利 用 GPS 建 立 各 种 类 型 和 等 级 的 控 制 网 ,在 这 些 方 面 GPS 技 术 已 基 本 上 取 代 了 常 规 的 测 量 方 法 ,成 为 了 主 要 手 段 。 较 之 于 常 规 方 法 , GPS 在 布 设 控 制 网 方 面 具 有 测量精度高;选点灵活、不需要造标、费用低;全天侯作业; 观测时间短;操作简便等优点。 基 线 解 算 是 GPS 网 观 测 数 据 处 理 过 程 的 重 要 环 节 ,基 线 解 算 质 量 的 好 坏 直 接 关 系 到 各 条 基 线 的 观 测 精 度 ,从 而 影 响 整 个 控 制 网 的 精 度 。因 此 基 线 解 算 质 量 控 制 以 及 基 线 解 算 过 程 中 数 据 的 处 理 方 法 是 整 个 控 制 网 数 据 处 理 的 关 键 点 。结 合 GPS 定 位 原 理 和 实 际 经 验 对 于 GPS 基 线 解 算 阶 段 需 要 解 决 的 一 些 关 键 问 题作以下论述。
1
高精度卫星导航定位行业研究报告分析
高精度卫星导航定位行业研究报告 目录 一、全球卫星发展概况 (3) 二、全球卫星导航系统发展历程 (4) 1、50年代末至60年代末是GPS研发的初级积累阶段 (4) 2、70年代初至80年代末GPS研发正式开始 (5) 3、1989年至1994年是GPS实用组网阶段 (5) 4、994年至2000年是GPS军转民的过渡阶段 (5) 5、2000年GPS正式放开在全球广泛推广应用 (5) 三、全球卫星导航定位行业市场规模 (6) 四、中国卫星导航定位行业发展历程 (6) 1、90年代中期以前为起步阶段 (6) 2、1996—1997年是市场发展期 (7) 3、1998—2001年是市场逐渐成熟的时期 (7) 4、2002年进入产业化发展阶段 (7) 5、2005年民用市场规模化发展开始 (7) 五、中国市场规模 (9) 六、中国卫星导航定位行业基本特点 (10) (一)高精度卫星导航定位行业 (10) 1、专业市场正在成长,国厂商加速赶超国外厂商 (10)
2、国企业竞争力提升,从进口主导格局走向国产替代进口 (10) 3、行业毛利随着技术进步、成本回落以及规模影响的共同驱动下稳步提升 (11) 4、GNSS产业已经形成专业的上下游产业链结构,中国高精度GNSS 产业链已经初步形成,国产品牌在GNSS产业价值链上取得重要位置 (11) (二)消费类卫星导航定位行业 (12) 1、市场形成一定规模,数百家终端企业参与竞争,盗版与山寨泛滥成灾 (12) 2、以北上广为中心的三大区域是消费类应用市场的发动机 (13) 七、高精度卫星导航定位应用市场概况 (14) (一) 应用市场规模 (14) 1、全球卫星导航定位专业应用市场 (14) (二) 行业应用市场发展 (15) 1、测绘仪器市场 (15) 2、GIS地理信息市场 (19) 3、系统工程 (22) 八、高精度卫星导航行业市场竞争结构分析 (25) (一) 高精度GNSS产品 (25) 1、市场竞争结构 (25) (二) 水声探测设备 (28) 1、市场竞争结构 (28) 九、高精度卫星导航定位行业市场发展趋势 (30) (一)高精度GNSS产品市场发展趋势 (30) (二)水声探测设备市场发展趋势 (32) 十、高精度卫星导航定位行业技术发展趋势 (33) (一)高精度GNSS产品技术发展趋势 (33)
GPS导航定位原理以及定位解算算法.docx
GPS导航定位原理以及定位解算算法 全球定位系统(GPS)是英文Global POSitiOning SyStem 的字头缩写词的简称。它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。 GPS用户部分的核心是GPS接收机。其主要由基带信号处理和导航解算两部分组成。其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导 航数据解码等工作。导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算, 并将其从伪距中消除;根据上述结果进行接收机PVT (位置、速度、时间)的解算;对各精 度因子(DoP)进行实时计算和监测以确定定位解的精度。 本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。 1 地球坐标系简述 要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相 对于地球而言的。因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动 的坐标系、即地球坐标系作为参照系。 地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ构成右手坐标系(即指向东经90 度方向)。 地球大地坐标系的定义是:地球椭球的中心与地球质心重合,椭球的短轴与地球自转 轴重合。地球表面任意一点的大地纬度为过该点之椭球法线与椭球赤道面的夹角φ经度 为该点所在之椭球子午面与格林威治大地子午面之间的夹角λ,该点的高度h为该点沿椭 球法线至椭球面的距离。设地球表面任意一点P在地球直角坐标系内表达为P( X,y,Z ),在地球大地坐标系内表达为P (φλ,h)。则两者互换关系为:大地坐标系变为直角坐标 系: (1)
GPS基线解算精度分析
GPS基线解算精度分析 摘要:本文主要通过是建立在实验的上分析影响不同长度基线解算精度的因素。在熟悉TGO这款软件的同时进行实验分析影响基线解算精度的因素,进而掌握GPS基线解算是的一些简单技巧。 关键词:基线TGO精度RMS 作者简介:黄纪晨(1985-),男,硕士研究生,毕业于河海大学,先在新疆维吾尔自治区交通规划勘察设计研究院任职,主要从事星导航与定位和精密工程测量等方面的研究工作 GPS定位技术在测量中的应用日益深入广泛,随着该技术的不断发展,对GPS测量精度的要求越来越高。对于GPS控制网而言,提高基线解算精度是提 高GPS网点精度的基础。 本文使用Trimble提供的TGO进行解算,对不同长度基线的解算精度做简单的对比介绍。根据TGO的特点主要从卫星高度角设置、对流层模型选择、电离层改正进行实验对比。本文所采用的数据是来自三个不同的控制网的具有典型长度的基线,同样选择了Trimble 5700接收机所测数据。 选择的基线长度不同的六条基线,为了对比方便设置基准为: Bern是高精度的基线解算软件,其的解算结果作为参考假设为真值,实验数据以对比RMS为主,同时注意水平精度和垂直精度,以及ΔL,ΔL是TGO 的基线解算结果和Bern解算结果之差的绝对值。 1、卫星高度角的设置 增加卫星高度角是为了剔除一些观测质量不佳的数据,比如高大建筑物遮挡造成的不佳。从信号质量来讲,增加高度角都会剔除一些质量不佳的数据。 实验分为Trimble默认的13和30度数下的解算精度进行对比。其中使用L1频率固定解算,对流层改正模型使用Saastamoine模型,电离层设置为对于10Km 以上的基线加入电离层改正。
2016-2022年中国高精度卫星导航定位(GNSS)市场评估与发展前景研究报告
2016-2022年中国高精度卫星导航定位(GNSS)市场评估与发展前景研 究报告 https://www.360docs.net/doc/4313928925.html,
什么是行业研究报告 行业研究是通过深入研究某一行业发展动态、规模结构、竞争格局以及综合经济信息等,为企业自身发展或行业投资者等相关客户提供重要的参考依据。 企业通常通过自身的营销网络了解到所在行业的微观市场,但微观市场中的假象经常误导管理者对行业发展全局的判断和把握。一个全面竞争的时代,不但要了解自己现状,还要了解对手动向,更需要将整个行业系统的运行规律了然于胸。 行业研究报告的构成 一般来说,行业研究报告的核心内容包括以下五方面:
行业研究的目的及主要任务 行业研究是进行资源整合的前提和基础。 对企业而言,发展战略的制定通常由三部分构成:外部的行业研究、内部的企业资源评估以及基于两者之上的战略制定和设计。 行业与企业之间的关系是面和点的关系,行业的规模和发展趋势决定了企业的成长空间;企业的发展永远必须遵循行业的经营特征和规律。 行业研究的主要任务: 解释行业本身所处的发展阶段及其在国民经济中的地位 分析影响行业的各种因素以及判断对行业影响的力度 预测并引导行业的未来发展趋势 判断行业投资价值 揭示行业投资风险 为投资者提供依据
2016-2022年中国高精度卫星导航定位(GNSS)市场评估与发展前景研究报告 【出版日期】2016年 【交付方式】Email电子版/特快专递 【价格】纸介版:7000元电子版:7200元纸介+电子:7500元【报告编号】R404343 【报告链接】https://www.360docs.net/doc/4313928925.html,/research/201604/404343.html 报告目录: 卫星导航定位技术为人们出行带来了很多便利,但很多车载导航和手机导航给人留下了定位系统精度并不高的印象,常常出现定位偏差因此耽误行程的问题,引发诸多吐槽。通过卫星定位一些关键技术的应用,精度可以提高到厘米级的程度。 智研数据研究中心发布的《2016-2022年中国高精度卫星导航定位(GNSS)市场评估与发展前景研究报告》依据国家统计局、海关总署和国家信息中心等渠道发布的权威数据,以及中心对本行业的实地调研,结合了行业所处的环境,从理论到实践、从宏观到微观等多个角度进行研究分析。它是业内企业、相关投资公司及政府部门准确把握行业发展趋势,洞悉行业竞争格局,规避经营和投资风险,制定正确竞争和投资战略决策的重要决策依据之一,具有重要的参考价值! 智研数据研究中心是中国权威的产业研究机构之一,提供各个行
gps 基本原理及基线解算
城市GPS控制网施测质量控制措施探讨 【摘要】本文作者在深入研究全球定位系统(GPS)静态定位原理的基础上,结合多年生产实践经验,就城市GPS控制网的布网原则、等级划分、作业方法及成果整理要求进行了探讨。通过全面质量控制以确保城市GPS控制网测量成果符合现行测量规范的要求。 【关键词】GPS 基线向量约束平差 全球定位系统(Global Positioning System,缩写GPS)是美国第二代卫星导航定位系统。该系统以其全能性(陆地、海洋、航空和航天)、全球性、全天候、连续性和实时性的导航定位功能,已被广泛地应用于各种等级精度的城市控制测量中。如何对城市GPS控制网施测进行有效的质量监控,将会直接影响到成果的测量精度。为此,笔者结合多年的生产实践经验,就如何有效保证城市GPS控制网测量精度制定了一套质量控制措施,以供城市测量GPS用户参考。 一、技术标准 ※中华人民共和国国家标准《全球定位系统(GPS)测量规范》GB/T 18314-2001 ※中华人民共和国行业标准《全球定位系统城市测量技术规范》CJJ 73-97 ※中华人民共和国测绘行业标准《全球定位系统(GPS)测量型接收机检定规程》CH 8016-95 ※中华人民共和国测绘行业标准《测绘产品检查验收规定》CH 1002-95 二、专业技术设计 (一)等级划分 根据《全球定位系统(GPS)测量规范》和《全球定位系统城市测量技术规程》中规定的城市各级GPS 控制网相邻点间平均距离,要求在城市GPS控制网布设时,其相邻点间平均距离应符合表1要求。同时,允许相邻点的最小距离可为平均距离的1/3~1/2,最大距离可为平均距离的2~3倍。考虑到南方地区丘陵、山地地形复杂,因此,在南方地区布设C级GPS控制网时,其平均边长限制可根据实际情况适当放宽到20~25公里,同时规定边长超过25公里的同步环应增测一个时段,以确保GPS测量数据的质量。 城市各级GPS控制网平均边长表1(单位:km) (二)精度设计 根据GPS控制网相邻点间基线长度精度计算公式: 式中:σ为标准差,单位mm; d为相邻点间距离,单位mm。 计算得到各级GPS控制网最弱边相对中误差限差,同时规定了观测相应等级GPS控制网时所选GPS 接收机标称精度不应低于表2的要求。布设一级、二级GPS控制网时,由于边长通常都较短,如用最弱边相对中误差来评定控制网精度则很难达到要求,因此,《全球定位系统城市测量技术规程》中规定了当边长小于200米时,则以其边长中误差应小于20毫米为限差要求。 城市各级GPS控制网最弱边相对中误差表2
GPS操作流程及基线解算
第八章GPS操作流程和基线解算 第一节GPS系统组成 一、设备 GPS系统由空间卫星部分、地面监控部分和用户接收部分三部分组成,如图6.1所示。 1、空间卫星部分 (1)GPS卫星星座。设计星座:21—3,即 21颗正式的工作卫星加3颗活动的备用卫星。6 个轨道面,平均轨道高度20200km,轨道倾角 55°,周期11h58min(顾及地球自转,地球与 卫星的几何关系每天提前4min重复一次)。保证 在24h,在高度角15°以上,能够同时观测到4~ 8颗卫星。 (2)GPS卫星。GPS卫星的作用是发送用 于导航定位的信号等。主要设备是原子钟(2台 铯钟、2台铷钟)、信号生成与发射装置。类型有试验卫星B1oCk I和工作卫星BloCkⅡ。 (3)GPS卫星由洛克韦尔国际公司空间部研制。卫星重774kg(包括310kg燃料),采用铝蜂巢结构,主体呈柱形,直径为l。5m。星体两侧装有两块双叶对日定向太阳能电池帆板,全长5.33m,接受日光面积7.2㎡。对日定向系统控制两翼帆板旋转,使板面始终对准太阳,为卫星不断提供电力,并给三组15AH镉镍蓄电池充电,以保证卫星在地影区能正常工作。在星体底部装有多波束定向天线,这是一种由12个单元构成的成形波束螺旋天线阵,能发射L,和L。波段的信号,其波束方向图能覆盖约半个地球。在星体两端面上装有全向遥测遥控天线,用于与地面监控网通信。此外,卫星上还装有姿态控制系统和轨道控制系统。工作卫星的设计寿命为7年。从试验卫星的工作情况看,一般都能超过或远远超过设计寿命。第一代卫星现已停止工作。第二代卫星用于组成GPS工作卫星星座,通常称为GPS工作卫星。BloCkⅡA的功能比BloCkⅡ大大增强,表现在军事功能和数据存储容量。BloCkⅡ只能存储供45天用的导航电文,而BloCkⅡA则能够存储供180天用的导航电文,以确保在特殊情况下使用GPS卫星。第三代卫星尚在设计中,以取代第二代卫星,改善全球定位系统。其特点是:可对自己进行自主导航;每颗卫星将使用星载处理器,计算导航参数的修正值,改善导航精度,增强自主能力和生存能力。据报道,该卫星在没有与地面联系的情况下可以工作6个月,而其精度可与有地面控制时的精度相当。 2、地面监控部分 (1)地面监控部分的分布。 1)主控站1个,地点在美国科罗拉多州法尔孔空军基地。 2)监测站5个,分别在夏威夷、美 国科罗拉多州法尔孔空军基地、阿松森群 岛(大西洋)、迪戈加西亚(印度洋)和 卡瓦加兰(太平洋)。
GPS与导航的区别
GPS与导航的区别 GPS与导航是两个不同的概念,GPS可以说是一种技术,而导航则是利用这种技术而创造出来的一种产品;所以说导航是在GPS的基础上发展起来的。GPS其实就是一些经纬度和海拔高度的数据信息,对于绝大部分终端用户来说即使知道了也没多少实际作用;导航就不一样了,只要您打开导航系统,并确定了您要去的目的地,导航系统便会自动完成行驶路径的规划,并配合专业文字及语言报读信息引导您安全快捷到达您的目的地。简单地说,导航就是“带路人”,而且这个“带路人”的道路数据非常庞大,天目领航导航系统现在的电子地图覆盖范围已经超过市面上其他任何一种导航产品的地图覆盖范围,达到了一千二百多个城市的具体地图数据(地图具体覆盖范围请转到主营产品里了解)。四、GPS防盗和GPS导航 GPS防盗是利用GPS全球卫星定位技术来实现远程追踪防盗的,属于较早期的GPS产品;而GPS导航则是利用GPS技术并配合电子地图来实现智能导航功能的,属于高新GPS产品;所以两者不是同一个概念,作用当然也不同。但现在仍有一部分人一听到GPS就以为是防盗的,要知道装了GPS防盗的客户一旦去到生疏城市就不很清楚自己行驶在什么地方,也不很清楚要怎样才能更快到达目的地,想知道自己的位置还要打电话到监控服务中心咨询;但有了GPS导航系统以上的问题就全迎刃而解了,不但能让您对自己正行驶的地理位置了如指掌,更能指引您轻松快捷到达您想去的目的地。当然,GPS导航不具备GPS防盗的防盗功能,而
GPS防盗也不具备GPS导航的导航功能,这就是两者的区别。为保证GPS正常工作必须外接GPS天线。室外定位时,首先要远离高层建筑物或上方有遮挡的地方(如立交桥下),某些特殊地方由于有辐射等干扰信号的原因,会出现盲区无法定位。如在某地无法定位,请移动到十几米外。所以永盛杰导航仪的说明书才会讲搜星的时候最好到空旷地带,这样比较快。
导航与定位实验报告
导航与定位上机实习报告 学生姓名:孔令周 班学号:021/ 指导教师:黄鹰、徐战亚 中国地质大学(武汉)信息工程学院 2011年 7月
实习一 GPS设备使用 【实验目的】 (1)熟悉GPS设备的使用 (2)熟悉GPS绝对静态定位和绝对动态定位 (3)使用GPS设备得出某一点、某一线、某一面的相关数据 【实验设备】 动态GPS接收机、静态GPS接收机、天线、GPS定位设备 由于设别数目的限制,这次实习改用一个google的软件,获得GPS数据,此图为软件中的一张截图,上面显示了精准度157feet,卫星数目,每颗卫星的信号强度, 这张图则显示了所在地的经度和纬度分别为东经114度23分秒北纬30度31
分秒。 【实验步骤】 时间:2012年9月2日中午12点30开始,下午三点中结束。 内容: 1、测量点:测量点在北区,从艺术与传媒学院开始,经过北宗,北区食堂, 北门,北区体育馆直到图书馆这一段路程,整个路线成G字型(如下图)。 2、测量线:线的话主要是艺术与传媒学院到北宗与隧道口延伸的路相交的 丁字路口,然后从该路口一直到北区食堂下面,在就走向北区校门,进 而转向体育馆侧边的路,绕过体育馆到达图书馆正门这样一个路线(如 下图)。
3、测量面:该路线主要包括了图书馆,北区篮球场,排球场,北一楼,北 区图书馆,经管院楼还有外国语学院楼。 【实验结果】 部分数据(全部数据在中):
实习二 GPS定位接口解析与开发 【实验题目】 GPS信号解析 编写小程序读取GPS信号并进行解析,将解析结果以一定形式展现出来。 根据老师用GPS导航仪测量得到的测量数据进行解析,将中的数据进行解析,根据不同的格式按照NMEA-0183协议对导航电文进行GPS信息的解析: 1、使用语言不限:C , C++ ,C# ,JAVA 2、对于获取信号可采用以一定时间间隔读取文件中GPS信号的形式代替从串口中读取 信号。 3、该实验基本要求能解析出空间信息(即解析GPRMC格式的GPS信号),其他信号格式 的解析以及星历图的绘制可在完成基本要求之后进行扩展。 4、对解析出来的数据进行画图处理,得到真正的轨迹。 【实验原理】 GPS设备通过对接收到的导航电文进行分析处理,计算出设备所在的经纬度、海拔、航速、航向等空间信息,并按照规定的协议将空间信息以及卫星信息进行组织,将有组织的数据解析出来然后做应用。 是
高精度卫星导航定位产业市场研究报告
高精度卫星导航定位产业市场研究报告 上海产业技术研究院 卫星导航产业发展战略研究中心 2015年4月
前言 这是一篇很好的报告,有质有量,很多数据来自于第一线,值得一读。高精度是卫星导航的特色,由于卫星导航利用的是原子钟技术,用时间来测量距离,所以达到了导航领域前所未有的高精度。有一句俗话:“卫星导航,玩儿的就是高精度”。近年来,高精度技术的进一步发展已经成为卫星导航的重要趋势,一是卫星导航系统本身的信号精度,在不断的提高,用户的无误差测距精度已经降到米以下,GPSIII的定位精度有望达到0.6米;二是国际GNSS服务(IGS)机构已经可以在网络上提供精密星历和星钟的时钟改正的实时服务;三是星基、地基的增强服务在逐步升级,提供更加精密优质的服务能力;四是在多系统兼容互操作与接收机方面进一步取得新的成果和发展,对于精度提升有明显意义。 值得指出的是,高精度定位的应用与服务产业与市场领域,在快速发展进步。最近,我国在北斗系统的推动下,高精度应用,已经逐步走出传统的大地测量测绘应用,走向更加广阔的领域,在精细农业、位移监测、高铁控管、驾考驾培、地下管网、车道级定位……等一系列领域出现新应用、新服务、新业态,值得大家关心。本报告有理有据、有观点、有想法,所持建议和想法很有参考价值。 曹冲 2015年4月15日
目录 一、卫星导航产业概述 (5) (一)卫星导航系统概述 (5) (二)卫星导航应用概述 (6) (三)全球卫星导航产业发展概述 (8) (四)中国卫星导航产业发展概述 (10) 二、高精度卫星导航定位产业现状 (13) (一)发展概况 (13) (二)产业链分析 (16) (三)行业利润情况 (19) (四)市场供需情况 (21) 三、卫星导航测绘仪器市场分析 (22) (一)市场规模 (22) (二)发展特点 (23) (三)竞争格局 (23) (四)影响因素 (24) (五)规模预测 (24) 四、中国GIS数据采集器市场发展分析 (26) (一)市场规模 (26) (二)发展特点 (27) (三)规模预测 (28) 五、卫星导航位移监测应用市场分析 (29) (一)市场规模 (29) (二)发展特点 (34) (三)竞争格局 (35) (四)影响因素 (35) (五)规模预测 (36) 六、卫星导航农业机械应用市场分析 (38) (一)市场规模 (38) (二)发展特点 (42) (三)竞争格局 (42) (四)影响因素 (43) (五)规模预测 (43)
《GPS定位与导航》课程教学大纲
《GPS定位与导航》课程教学大纲 课程代码:2107010321 课程名称:GPS定位与导航 GPS Satellite Positioning and Navigation 学分:4 总学时:64(其中:理论学时:52 实验(上机)学时:12) 先修课程:2107010150大地测量学基础 适用对象:测绘工程、地理信息科学、遥感科学与技术、海洋技术 一、课程地位、作用与任务 本课程是测绘工程专业的核心专业主干课程之一,同时也是地理信息科学专业、遥感科学与技术和海洋技术专业的专业主干课程。使学生掌握现代化大地定位测量的理论和方法,适应现代地理信息数据采集的需要。通过本课程的学习,培养学生应用GPS卫星定位与导航技术,完成各种GPS控制网的设计、布置、施测、数据处理; GPS采集地理信息数据与GPS导航的能力,熟悉GPS测量标准与工程环境。 二、教学内容及组织 1 绪论 使学生了解全球卫星定位系统的应用现状及发展,掌握GPS定位与导航技术主要应用,熟练掌握GPS系统的组成。 重点:GPS系统的组成、GPS定位技的特点。 难点:GPS系统的组成。 教学内容: 1.1 全球卫星定位与导航技术发展 1.2 卫星定位技术特点及应用 1.3 卫星系统组成 2 卫星定位坐标系统与时间系统 了解坐标系统的类型,掌握GPS时间系统,熟练掌握大地测量基准及其转换。 重点:坐标系统的类型、大地测量基准及其转换、GPS时间系统。 难点:大地测量基准及其转换。 教学内容: 2.1协议天球、地球坐标系 2.2 GPS卫星定位坐标系及转换 2.3 GPS卫星导航定位时间系统
3 卫星运动基础知识及坐标计算 了解卫星的受摄运动;掌握GPS卫星的星历;熟练掌握GPS卫星坐标计算。 重点:GPS卫星的星历;GPS卫星坐标计算。 难点:GPS卫星坐标计算。 教学内容: 3.1卫星运动 3.2卫星星历 3.3卫星坐标计算 4 GPS卫星信号 了解大气层对电磁波传播的影响,掌握测距码信号、熟练导航电文及卫星信号构成。 重点:大气层对电磁波传播的影响;GPS卫星信号的构成;GPS卫星的导航电文。 难点:GPS卫星的导航电文;大气层对电磁波传播的影响。 教学内容: 4.1 GPS信号与特点 4.2 GPS卫星导航电文 5 卫星定位导航原理 熟练掌握GPS绝对定位原理和相对定位原理;掌握整周未知数确定与周跳分析;熟悉差分GPS测量原理与导航;了解广域差分GPS测量原理。 重点:GPS绝对定位原理;GPS相对定位原理;GPS卫星导航原理。 难点:差分GPS测量原理;整周未知数的确定方法与周跳分析。 教学内容: 5.1绝对定位原理 1)测码伪距观测方程及其线性化 2)测相伪距观测方程及其线性化 3)静态绝对定位原理 4)动态绝对定位原理 5.2 相对定位原理 1)相对定位的概念 2)静态相对定位的观测方程及其解算 5.3 差分测量原理 1)伪距差分原理 2)位置差分原理 3)载波相位差分原理 5.4 整周未知数确定方法与周跳修复
北斗与GPS基线解算精度对比分析
北斗与GPS基线解算精度对比分析 摘要:本文将北斗导航系统和GPS导航系统为研究对象,以HGO数据处理软件 为平台,以载波相位观测值的双差模型为基础。使用长短两组基线观测数据进行 基线处理,根据处理得到的RATIO、RMS、点位精度这几个质量指标来衡量基线 解算的质量。通过更改一些基本参数设置来分析不同情况下的精度问题,同时分 析比较北斗系统和GPS系统的区域卫星可见性,以及在单系统和系统组合下的定 位精度和可靠性的区别。 关键字:北斗导航系统;GPS系统;双差模型;基线解算 1引言 在美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后,中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)是中国自 主研发的全球第三个成熟的卫星导航系统[1]。北斗系统的快速发展不仅可以促进 国家的经济建设,也提高了中国在世界的地位。但目前北斗系统相比GPS略有不足,所以要通过不停的探究来使其进一步的发展与完善。 2卫星可见性和PDOP值的比较 卫星可见性是在特定仰角下地面某点在某时刻能观测到的所有卫星的数量或 某时段所有观测卫星的跟踪弧段长度,根据卫星可见性的定义,卫星可见性与测 站所处位置、观测时间及卫星的截止高度角等息息相关[2]。 PDOP值是指三维几何精度因子单点定位的精度为 由相关数据分析可知:使用GPS系统进行基线处理时,在其它基线解算设置参数不变的情况下,仅改变高度截止角,从开始,高度截止角越高(观测卫星数越少),RMS值略微降低 (观测值质量越好);点位精度有所降低;RATIO值基本不变,定位精度差别不大。以此例 来看,并不是高度截止角越高越好,此例中高度截止角25°时定位精度效果最好。使用COMPASS系统进行基线解算时,结论与使用GPS系统基本相似,定位精度差别不大,总的来看20°时的精度效果最好。 (2)采样间隔 采样间隔是指在处理基线时,系统在观测数据按照固定的时间间隔提取数据。为提高极 限处理的速度,用户可适当增大数据处理的采样间隔[5]。由数据分析可知:在使用GPS系统 处理基线时,在其它参数不变的情况下,仅改变采样间隔,当采样间隔大于30时,随着采 样间隔的增大,RMS值无太大变化;而点位精度呈下降趋势;RATIO值基本不变。 4、结语 本文主要借助于中海达的HGO数据处理软件,进行了北斗和GPS的基线处理数据精度分析。从一些基本参数的设置找出其对精度变化的影响,如高度截止角与采样间隔。从长基线 的数据分析可得出结论,随着高度截止角的增高,观测到的卫星数会减少,但由于消除了较 低的卫星数据,观测值的质量会提高,而点位精度略微下降。而采样间隔对于长基线数据大 于30的情况下,RMS值无太大变化,点位精度随着采样间隔增大而降低。总的来说北斗系 统的定位精度以以前有明显提高,但还是略低于GPS,两者的组合可以有效提高精度。 参考文献 [1]中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件(测试版)[R].中国卫星导航系统管理办公室,北京,2011. [2]高星伟,过静珺,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,5. [3]刘永明,张云,袁国良. GPS/北斗-2组合定位性能的研究[J].电子设计工程,2013,14.
GPS卫星导航定位技术与方法(样卷)
《GPS卫星导航定位技术与方法(样卷)》-----by 郝若杰 名词解释:(20) 1.同步观测网 2.绝对定位 3.相对定位 4.历元 5.极移 6.大地高 填空题:(20) 1.由非同步观测基线构成的闭合环,称为________。 2.五台接收机同步观测的基线数为____个,独立基线为____个。 3.精度衰减因子与______的空间分布有关。 4.两同步观测的测站上的单差相减,称为______。 5.实时伪距差分定位也称为________。 6.实时载波相位差分定位也称为________。 7.参考站向________发射差分信号。 8.差分定位有________,相对定位没有。 9.无线点定位原理有:______________、____________、____________。 10.GPS增强系统有:______________、______________、_____________。 11.导航系统的分类:__________、______________、_____________。 12.现有或曾经出现过的无线电导航系统有: _______________、_____________、____________________________、_________________。 13.坐标系统的类型有:______________、_______________。 14.GPS定位中,具有重要意义的时间系统包括:_______、___________、_________。 15.GPS卫星星历分为:_______________、________________。 16.根据对电磁波传播的不同影响,大气层的结构一般分为:_________、_________。 17.通常将对流层的大气折射分:_______、_______。 18.接收机的主要结构有:_______、__________、________、__________、__________、 ______。 19.定位方法分类: ①按参考点的不同位置划分:__________、__________。 ②按用户接收机作业时所处的状态划分:__________、__________。 20.目前广泛应用的基本观测量主要有:______________、________________。 21.根据观测量的性质,伪距分为:__________、__________。 22.静态相对定位一般均采用_______________为基本观测量。 23.根据数据处理方式不同,动态相对定位可分为:____________、___________。 24.目前普遍采用的差分组合形式有:______、______、______。 25.静态相对定位的平差模型有:_________________、___________________。 26.静态相对定位的单基线平差模型有:___________________、___________、___________。 27.按网的位置基准不同,平差方法通常分为:____________、_____________、____________。 28.GPS测量工作可分为:_______、______两大部分。如果按照GPS测量实施的工作程序, 则大体可分为:___________、___________、___________、____________这样几个阶段。
卫星导航定位研究
卫星导航定位定轨技术及应用 (1) GNSS高精度定位与定轨 研究GNSS高精度定位与定轨的理论、方法和技术,主要内容包括:导航卫星星座的自主定轨方法,低轨卫星GPS自主定轨方法,多频多模导航卫星精密数据处理方法,多频多系统组合模糊度的确定方法,GNSS精密单点定位技术,大范围高精度网络RTK定位技术,多系统集成的无缝导航定位技术,GPS、GLONASS、Galileo及COMPASS多模卫星导航系统兼容与互操作关键技术等。 (2)北斗卫星导航系统关键技术 面向发展我国自主的卫星导航定位服务系统的重大需求,重点进行北斗二代国家重大专项的核心技术攻关。研究我国北斗卫星导航系统建设、测试、验证以及运行等方面的关键技术,包括GEO/IGSO/MEO卫星精密定轨、时间同步与长期预报技术、电离层延迟监测与建模、系统误差建模、系统完好性监测及广域差分处理等,研制北斗导航卫星数据处理平台。 (3)卫星导航定位综合应用服务 研究卫星导航定位系统在国防、国民经济建设及科学各领域应用中的理论和方法,包括地基/空基GNSS大气探测、GNSS高精度定位测速与定姿、位置服务、建筑物、构筑物安全监测,地质灾害监测等。 (4)组合导航与自主导航定位技术 研究卫星导航、惯性导航、无线电导航、地磁导航、生物视觉辅助导航、重力匹配、量子导航等多种导航系统的多源融合数据处理的理论和方法;探索基于最优估计理论的组合导航数据处理方法以及多传感器数据融合技术;研制集多种导航定位
传感器的组合导航系统平台,为航空、航天遥感等提供高精度的位置和姿态信息。 (5)基于伪卫星的高精度定位 研究在伪卫星星座支持下的高精度定位理论、方法和技术,主要内容包括:伪卫星天线相位中心的标定方法,基于伪卫星的高精度定位时频基准的建立和维持,基于伪卫星的高精度定位的数学模型和方法以及基于伪卫星的高精度实时动态定位等。
高精度定位与导航系统
第四章高精度定位与导航系统
本章小结 本章的学习目标你已经达成了吗?请通过思考以下问题的答案进行结果检验。序号问题自检结果 1 高精度地图与普通的导航地 图有哪些区别? 与传统地图相比,高精度地图信息的丰富性和 准确性都有显著的提升。高精度地图包含的信 息有以下内容和特点: (1)道路参考线为了实现车道级导航、路径规 划功能,需要在原始地图数据中抽象道路结构, 形成由顶点组成的拓扑图形结构,同时为了优 化数据的存储,需要将道路用连续的曲线段来 表示。 (2)道路连通性除道路参考线外,高精度地图 还应描述道路的连通性。比如路口中没有车道 线的部分,需要将所有可能的行驶路径抽象成 道路参考线,在高精度地图数据库中体现。 (3)车道模型除了记录道路参考线、车道边缘 (标线)和停车线外,高精度地图数据库还需 要记录无车道道路的拓扑结构,且除车道的几 何特性外,道路模型还包括车道数、道路坡度、 功能属性等。 (4)对象模型记录道路和车道行驶空间范围边 界区域的元素,模型属性包括对象的位置、形 状和属性值。这些地图元素包括路牙、护栏、 互通式立交桥、隧道、龙门架、交通标志、可 变信息标志、轮廓标志、收费站、电线杆、交 通灯、墙壁、箭头、文字、符号、警告区、分 流区等。 2 高精度地图在智能网联汽车 应用领域的作用有哪些? 为导航系统提供更高精度的路径和更精细、精 确的交通信息,引导车辆达到目的地,将环境 中尽可能丰富的信息提供给自动驾驶系统。满 足自动驾驶系统的导航、路径规划要求,用于 导航、路径规划,还可以为环境感知和理解提 供先验知识,辅助车载传感器实现高精度定位。