四足机器人运动学分析及步态研究
四足机器人步行腿运动学正反解
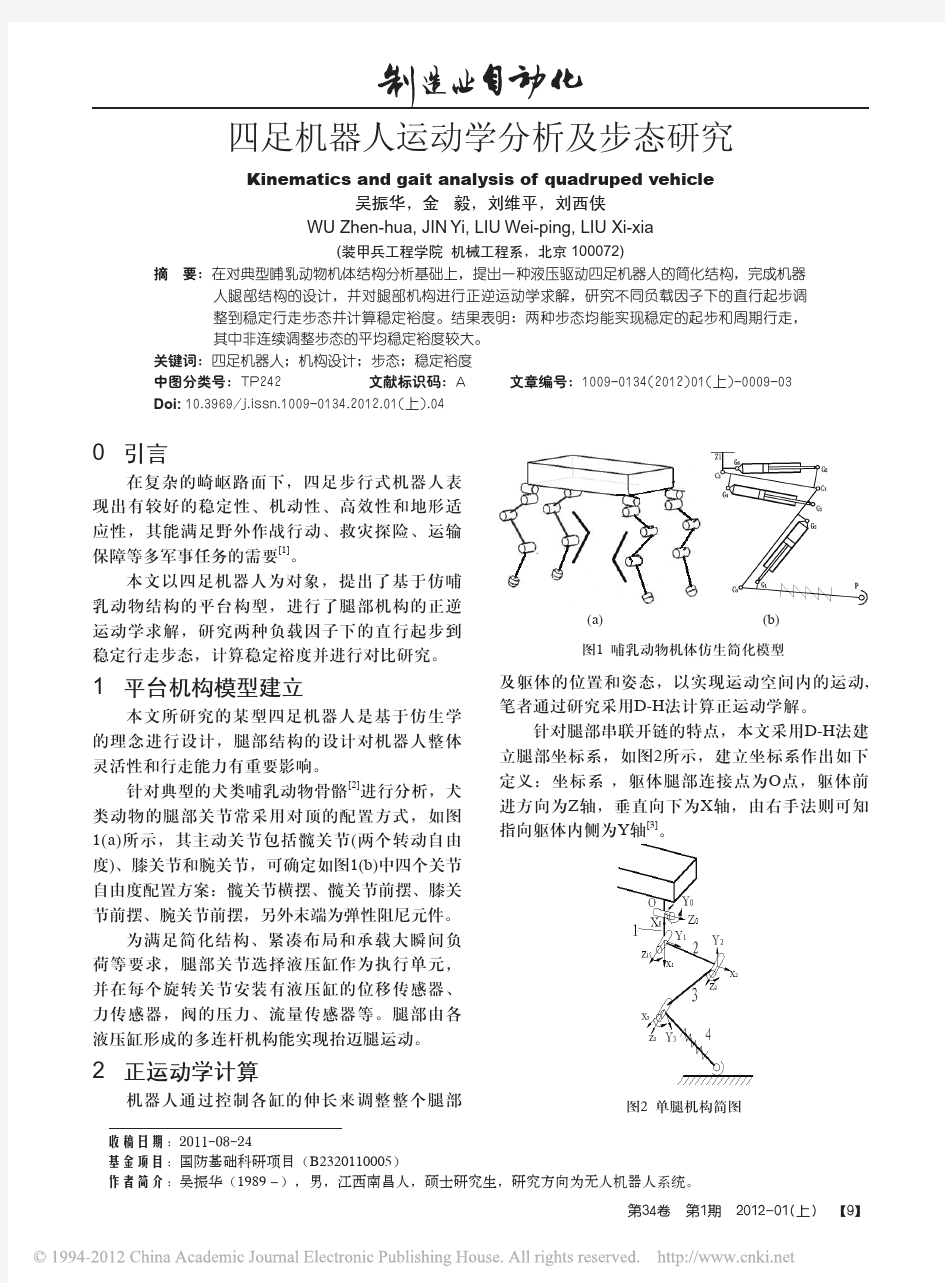
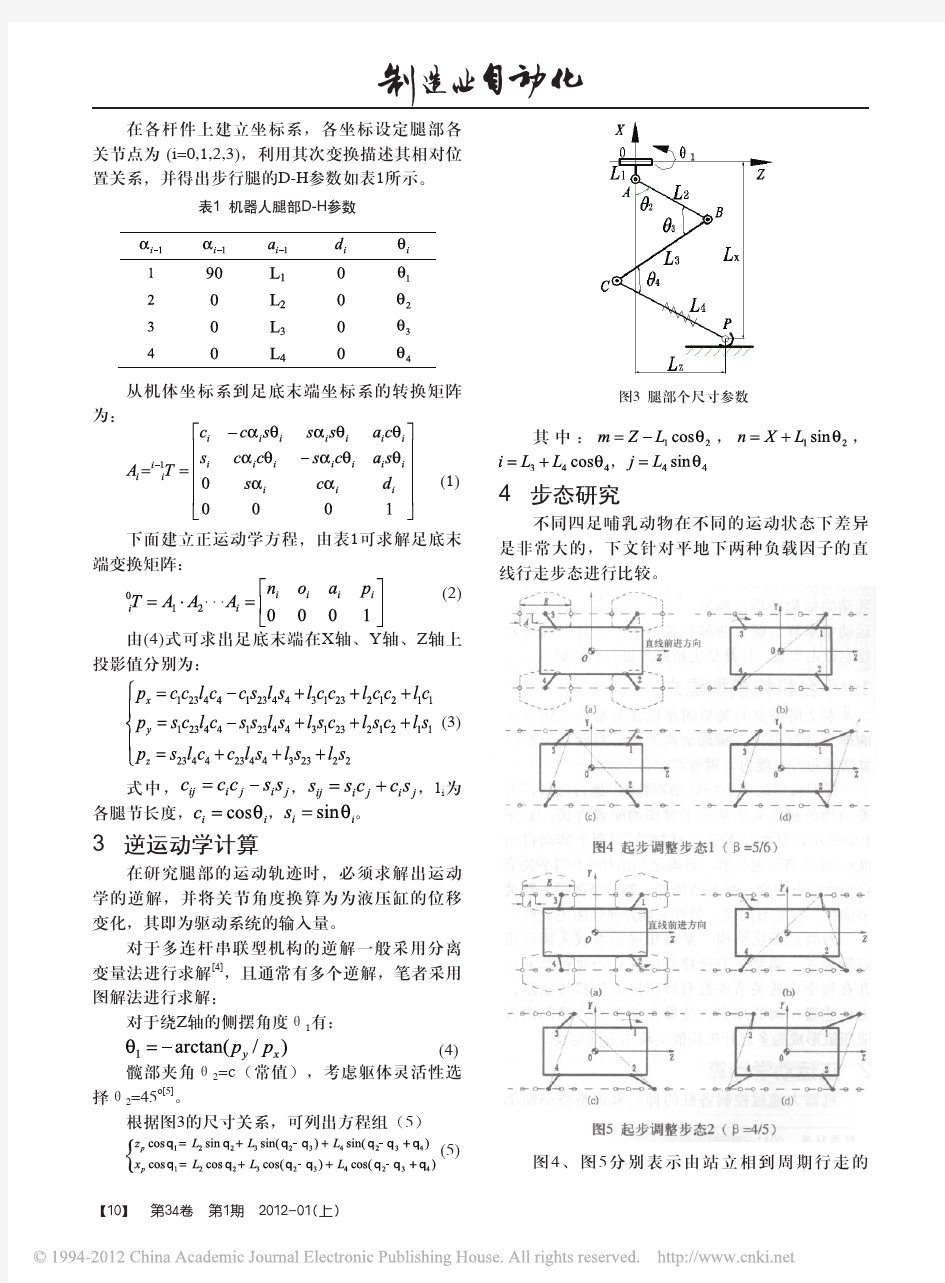
四足机器人步行腿的运动学正反解摘要:本文设计的步行腿具有3个驱动关节,分析了该步行机器人的机构及其等效简化,给出了运动学正反解,正解问题要比反解问题复杂很多。该分析方法准确率高,为步行腿的运动空间、轨迹规划和位置控制奠定了基础。 关键词:步行腿运动学正反解 abstract: in this paper, the design of walking legs with three drive joint analysis of the institutions of the walking robot and its equivalent simplified kinematics and inverse solution positive solution of the problem is much more complex than the inverse solution. the analytical method with high accuracy, and laid the foundation for walking space for the movement of the legs, trajectory planning and position control. keywords: walking legs kinematics positive and negative solution 0 前言 四足机器人的行走机构是步行腿,它是步行机器人中最为重要也是最复杂的构件[1],步行腿的灵活度这届决定了步行机器人的行走姿态和完成任务的复杂程度。本文设计的步行腿具有三个驱动关节,采用混连机构设计。给出了步行腿的运动正解和反解,是整个四足步行机器人系统设计的基础,也是机器人运动空间分析和尺
SCARA机器人的运动学分析
电子科技大学 实验报告 学生姓名: 一、实验室名称:机电一体化实验室 二、实验项目名称:实验三SCARA 学号: 机器人的运动学分析 三、实验原理: 机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。 各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程) 为: n x o x a x p x 0T40T1 11T2 22T3 d3 n y o y a y p y ( 1-5)3T4 4= o z a z p z n z 0001 式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0} 的位姿,是机械手运动分析和综合的基础。 式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4 o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4 o z0 , a x0 , a y0 , a z1 p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3 机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1 A arctg 1 A 2 l 12 l 22 p x 2 p y 2 arctg p x 式中:A p x 2 ; p y 2l 1 p y 2 2)求关节 2: 2 r cos( 1 ) arctg ) l 1 r sin( 1 式中 : r p x 2 p y 2 ;arctg p x p y 3). 求 关节变 量 d 3 令左右矩阵中的第三行第四个元素(3.4)相等,可得: d 3 p z 4). 求 关节变 量 θ 4 令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即: sin 1 n x cos 1n y sin 2 cos 4 cos 2 sin 4 由上式可求得: 4 arctg ( sin 1 n x cos 1 n y )2 cos 1 n x sin 1 n y 四、实验目的: 1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法; 2. 掌握 SCARA 机器人的运动学方程的建立; 3. 会运用方程求解运动学的正解和反解; ( 1-8) ( 1-9) ( 1-10 )
六自由度机器人运动分析及优化
本 科 毕 业 论 文(设 计) 题目(中文 学学 完 成 日 期 2017 年 3 月
摘要 当今世界,工业化日趋成熟,机器人被广泛的应用于各行各业,最常用到的有四自由度,六自由度机器人。其中,自动化水平较高的汽车制造业和电子装配业经常常常要使用到六自由度机器人。因此对其实施运动学分析,是进行科学设计的基础,也是降低机器人生产成本,优化机器人运动轨迹的前提。此外,运动分析过程有效的模拟了机器人运动的真实情况,有助于提供有效可行的优化方案。本文主要探讨六自由度机器人的运动分析,基于经典运动学以及动力学的研究方法概念,首先通过solidworks做出机械臂各部分零件的三维图,然后通过SolidWorks装配出六自由度机器人机械臂的三维模型。通过该模型,选取其中一个关节和底座,并用SolidWorks进行运动学分析,对六自由度机器人的运动学和动力学计算方法进行了仿真验证。最后得到六自由度机器人的其中一个自由度的运动仿真实例。通过对该运动仿真实例的分析,得出最佳优化方案,优化机器人的运动轨迹提高机器人的工作效率,降低机器人生产成本。 关键词:六自由度机器人;运动分析;运动学;动力学;
目录 摘要 ...................................................................................................................... I Abstract ............................................................................... 错误!未定义书签。 1 绪论 (1) 1.1课题背景及研究的目的和意义 (1) 1.2机器人国内外发展现状及前景展望--------------------------1 2 六自由度机器人运动学分析 (3) 2.1六自由度机器人的结构-------------------------------------1 2.2运动学分析----------------------------------------------1 3 六自由度机器人动力学分析 (5) 3.1综述----------------------------------------------------3 3.2机器人动力学研究方法------------------------------------3 3.2.1几项假设-------------------------------------------3 3.2.2目标-----------------------------------------------4 3.2.3数学工具-------------------------------------------5 3.3动力学原理----------------------------------------------3 3.3.1动量矩定理---------------------------------------------------------------6 3.3.2能量守恒定理--------------------------------------6 3.3.3牛顿—欧拉方程------------------------------------7 3.3.4达朗贝尔原理--------------------------------------8 3.3.5拉格朗日方程--------------------------------------9 4 六自由度机器人运动分析 (8) 4.1运动分析的软件背景---------------------------------------3 4.2运用solidworks建立六度机器人机械臂三维模型--------------9 4.3运用Solidworks对进行运动学分析-------------------------4 5 结论 (14)
六轴运动机器人运动学求解分析
六轴联动机械臂运动学及动力学求解分析 V0.9版 随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。 作者朱森光 Email zsgsoft@https://www.360docs.net/doc/441047132.html, 完成时间 2016-02-28
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。本文内容的正确性经过笔者编程仿真验证可以信赖。 2机器建模 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。 3运动学分析 3.1齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 =cosθ0 s0 = sinθ0 //c0 R0 =[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0 s1 c1 0 0