大学物理学理论力学—欧拉角

对于欧拉角的认识
[摘要]基于欧拉角的学习,加深认识关于欧拉角的相关知识点。定点运动的刚休可由欧拉角来描写出发,通过计算刚体上任意一点的速度来引入刚体的角速度。从欧拉角的理解中做到熟练掌握欧拉角、欧拉角的矩阵形式的表示、明确欧勒角的含义和它为什么完整的描述了定点转动刚体的运动状态,以及欧拉角在刚体力学中的具体应用,从而更好的理解欧拉角。
[关键词]欧拉角的定义;角速度;角加速度;刚体定点转动的应用 1:欧拉角的定义
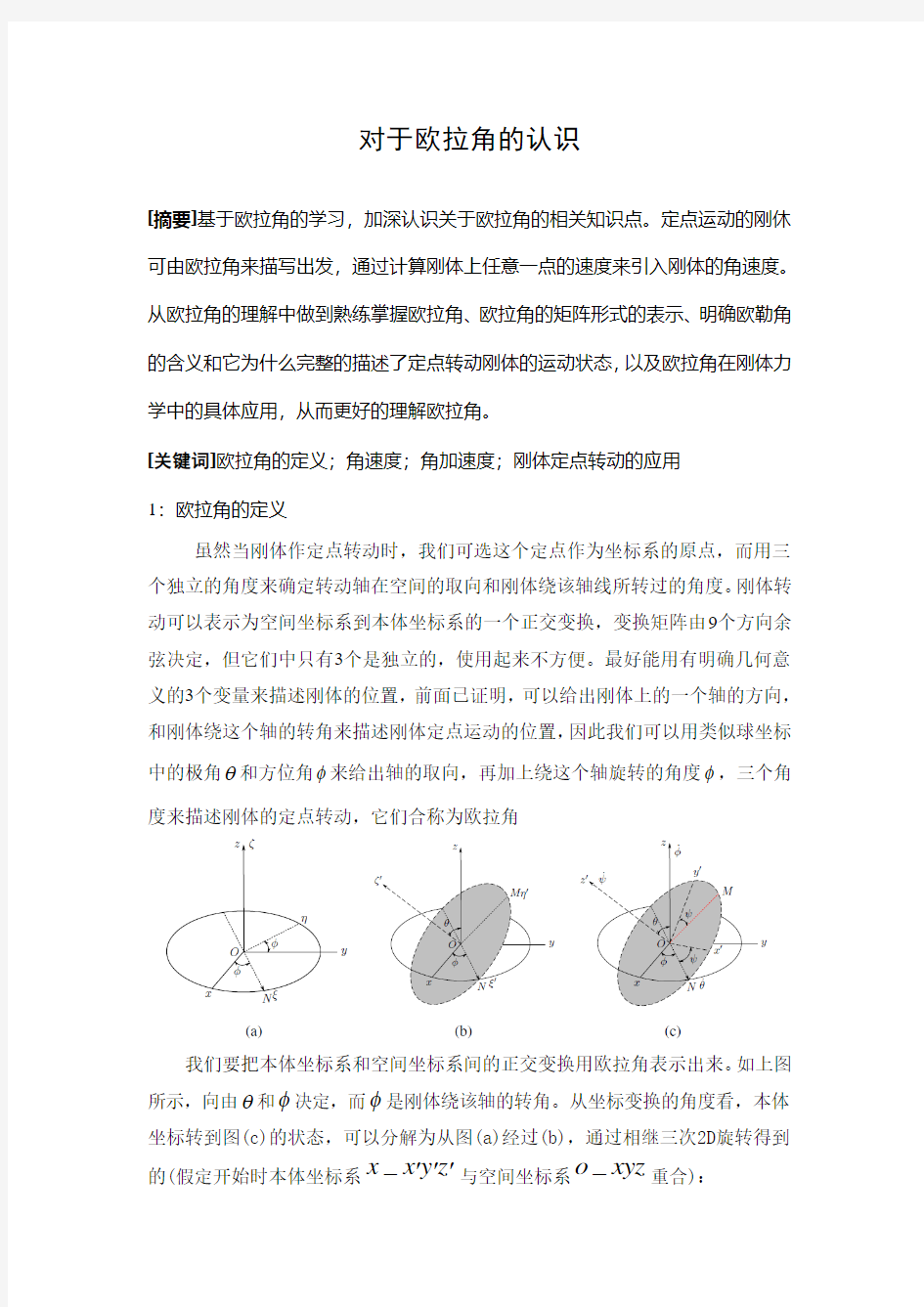
虽然当刚体作定点转动时,我们可选这个定点作为坐标系的原点,而用三个独立的角度来确定转动轴在空间的取向和刚体绕该轴线所转过的角度。刚体转动可以表示为空间坐标系到本体坐标系的一个正交变换,变换矩阵由9个方向余弦决定,但它们中只有3个是独立的,使用起来不方便。最好能用有明确几何意义的3个变量来描述刚体的位置,前面已证明,可以给出刚体上的一个轴的方向,和刚体绕这个轴的转角来描述刚体定点运动的位置,因此我们可以用类似球坐标中的极角θ和方位角φ来给出轴的取向,再加上绕这个轴旋转的角度φ,三个角度来描述刚体的定点转动,它们合称为欧拉角
我们要把本体坐标系和空间坐标系间的正交变换用欧拉角表示出来。如上图所示,向由θ和φ决定,而φ是刚体绕该轴的转角。从坐标变换的角度看,本体坐标转到图(c)的状态,可以分解为从图(a)经过(b),通过相继三次2D 旋转得到的(假定开始时本体坐标系x x y z '''-与空间坐标系o xyz -重合):
⑴o xyz o εηζ-→-本体坐标系绕z 轴在xy 平面上旋φ角:
cos sin 0sin cos 0001x y z εφφ
ηφφζ?????? ?
???
=- ? ??? ? ??????
???
⑵o εηζ
εηζ'''-→,本体坐标系绕ε
轴在ηζ平面转过θ角:
1
000cos sin 0sin cos εεηθθηζθθζ'?????? ? ???'= ? ??? ? ???'-??????
⑶x y z εηζ'
'''''→本体坐标绕ζ'轴在ηε''平面(阴影)转过ψ角:
cos sin 0sin cos 000
1x y z ψψψψ'???? ?
?'=- ? ? ? ?'???
?
变换矩阵就是三个2D 变换矩阵之积:
cos sin 01
00cos sin 0sin cos 00cos sin sin cos 00010sin cos 001x x ψψφφψψθθφφθθ?????? ?????'=-- ????? ?????-??????
它们由3个欧拉角决定。 2:欧拉角的角速度
在图4.3.7(c)的状态,考虑刚体有一无穷小转动,3个欧拉角相应有无穷小变化,刚体绕瞬时轴转动的角速度是刚体绕z 轴的角速度?,绕zo 轴的角速度
ψ,和绕ON 轴的角速度θ的矢量和,即:
N ωφψθ=++
其中N 是ON 轴的单位矢量,注意z 轴在阴影面的投影是OM ,从图(c)容易看到:
sin sin sin cos cos ,cos sin z x y z x z e e e e N e e θψθψθψψ'''''=++=-
因此ω在本体坐标系的分量在空间坐标中
sin sin sin cos cos ,cos sin z x y z x z e e e e N e e θφθφθψφ'''''=-+=+
注意若0?
=则zo 轴在xoy 平面的投影就在y -方向,0?=时该投影转
过了φ角,因此角速度在空间坐标系的分量为:
cos sin sin sin sin cos cos x y z ωθφψθφωθφψθφωψθφ
?=+?
=-??
=+? 3:欧拉角方程
定点转动的动力学方程是角动量定理:
M
dt l
d
= 刚体定点转动的角动量
j
x y x z x y m i
z x y x z y m r r r m r r m m r L i i z i
i
y i i i
x i i i z i i y i
i
i
x i i i i i i i i
i i i i i
i
])([])([)]
([)]([)(22222ωωωωωωωωωυ-++-+--+=?-=??=?=∑∑∑∑∑k
L j L i L k
I I I j
I I I i I I I k
y x y z x z m z y x z y x z y x z y x i
i
z i i y i i x i
i
++=+--+-+-+--=++--+∑)()()()]([33323123222113121122ωωωωωωωωωωωω
2211222222
33122113312332()()()i i i i i i i i i i i i
i i i
i i i i
i
i i i
i I m y z I m z x I m x y I I m x y I I m x z I I m y z ?=+??=+??=+???
==??
?==??
==??∑∑∑∑∑∑其中221122222233122113312332()()()I y z dm
I z x dm I x y dm I I xydm I I xzdm I I yzdm ?=+?
?=+??=+????==??==??==????????或111213212223313233x x y z y x y z z x y z L I I I L I I I L I I I ωωωωωωωωω?=--?=-+-??=--+?或 4:欧拉角的应用
⑴刚体力学中的欧拉角
为了描述刚体的位形,通常取两个坐标系:以固定点o 为原点固定在空间(静止坐标系)000ox y z ;固定在刚体上并随刚体运动(动坐标系)cxyz ,
取t=0时两坐标系的坐标轴重合,则刚体的运动可用坐标坐标系cxyz 相对于000ox y z 来表示,如图(e)所示。图中:ON-固定坐标平面00x oy 与动坐标平面
xoy 的交线(节线)。
0ox ?-轴与ON 间的夹角,描述了oz '轴(刚体自转轴)绕0oz 转动(进动角)。
oz θ-轴与oz 轴间的夹角是刚体自转轴oz 绕ON 转动角(章动角)
ψ-节线ON 与OX 轴间的夹角,刚体绕oz '轴的转动角(自转角)
上述,,φθψ三个角坐标称为欧拉角,确定了定点转动刚体在空间的位置,其变化范围为
πψπθπ?20,
0,20≤≤≤≤≤≤
⑵欧拉陀螺
若刚体所受的外力的合力通过固定点(即外力矩为零),则刚体因惯性自由转动,如分子的转动、地球的自转等,称为欧拉陀螺。
以地球自转为例。如图(f)地球是个扁平的均匀球体,若不考虑太阳、月球及其他行星的引力,则地球是对称的欧拉陀螺(12I I =),其运动方程为:
1131313()0()00
x y z y z x z I I I I I I I ωωωωωωω--=??
--=??
=?①
由上式中的第三式:
z ω=常数②
将①代入②的第一、二式
311
311x
z y y y z x x I I n I I I n I ωωωωωωωω-?=-=-???
-?=-=-??
③ 31
1
z I I n I ω-=
=其中常数④由③式,得 2
2
x x
y y
n n ωωωω?=-??=-??积分,可得 00cos()
sin()x y
nt nt ωωεωωε=+???
=+??⑤ 则地球自转角速度的大
常数
=+=++=220222z z y x ωωωωωω
其中ω
的方向:绕对称轴oz 以等角速度n 转动, 如图(g)所示。为了找出三个欧拉角的运动规律, 取L
(=常数)方向为oz 方向,如图(h)所示有
)cos cos sin sin (sin k j i L L
θψθψθ++=
123x y z L I i I j I k ωωω=++又
将④和⑤代入上式:
k I j nt I i nt I L z
ωεωεω30101)sin()cos(++++=
比较以上二式,可
???
??=+=+=230101cos )sin(sin sin )cos(sin sin ω
θεωψθεωψθI L nt I L nt I L
解上式,可得三个欧拉角的运动情况:
?????
????-=-=+===21310sec )(cos 0ωψθω?θθI I I n n z 常数
可见:陀螺无章动,只有自转和进动—规则进动。
[参考文献]
[1]
引 入 刚 体 角 速 度 的 另 一 种 方 法[J]1994年6月 河北师范 大学学报(自然科学版) 第18卷第2期 [2] 刚体力学幻灯片讲义[N]
[3]
用 微 分 算 子 表 示 的 欧 拉 方 程[J]l991年3月第12卷第1期 哈 尔 滨 船 舶 工 程 学 院 学 报 [4]
王美山,李文亮,杨传路,王德华,徐强,任廷琦绕任意轴μ旋转φ对应的欧拉角的新求解公式[C] [5] 吉林大学理论力学课件[N] [6]
三角函数公式大全81739
三角函数公式大全三角函数定义 函数关系 倒数关系: 商数关系: 平方关系: . 诱导公式 公式一:设为任意角,终边相同的角的同一三角函数的值相等: 公式二:设为任意角,与的三角函数值之间的关系:
公式三:任意角与的三角函数值之间的关系: 公式四:与的三角函数值之间的关系: 公式五:与的三角函数值之间的关系: 公式六:及与的三角函数值之间的关系: 记背诀窍:奇变偶不变,符号看象限.即形如(2k+1)90°±α,则函数
名称变为余名函数,正弦变余弦,余弦变正弦,正切变余切,余切变正切。形如2k×90°±α,则函数名称不变。 诱导公式口诀“奇变偶不变,符号看象限”意义: k×π/2±a(k∈z)的三角函数值.(1)当k为偶数时,等于α的同名三角函数值,前面加上一个把α看作锐角时原三角函数值的符号; (2)当k为奇数时,等于α的异名三角函数值,前面加上一个把α看作锐角时原三角函数值的符号。 记忆方法一:奇变偶不变,符号看象限: 其中的奇偶是指的奇偶倍数,变余不变试制三角函数的名称变化若变,则是正弦变余弦,正切变余切------------------奇变偶不变 根据教的范围以及三角函数在哪个象限的争锋,来判断三角函数的符号-------------符号看象限 记忆方法二:无论α是多大的角,都将α看成锐角. 以诱导公式二为例: 若将α看成锐角(终边在第一象限),则π十α是第三象限的角(终 边在第三象限),正弦函数的函数值在第三象限是负值,余弦函数的函数 值在第三象限是负值,正切函数的函数值在第三象限是正值.这样,就得 到了诱导公式二. 以诱导公式四为例: 若将α看成锐角(终边在第一象限),则π-α是第二象限的角(终 边在第二象限),正弦函数的三角函数值在第二象限是正值,余弦函数的 三角函数值在第二象限是负值,正切函数的三角函数值在第二象限是负 值.这样,就得到了诱导公式四. 诱导公式的应用:运用诱导公式转化三角函数的一般步骤: 特别提醒:三角函数化简与求值时需要的知识储备:①熟记特殊角 的三角函数值;②注意诱导公式的灵活运用;③三角函数化简的要求是项 数要最少,次数要最低,函数名最少,分母能最简,易求值最好。
[实用参考]大学数学公式总结大全
导数公式: 基本积分表: 三角函数的有理式积分:
一些初等函数: 两个重要极限: 三角函数公式: ·诱导公式: ·和差角公式:·和差化积公式: 2 sin 2sin 2cos cos 2cos 2cos 2cos cos 2sin 2cos 2sin sin 2cos 2sin 2sin sin β αβαβαβ αβαβαβ αβαβαβ αβ αβα-+=--+=+-+=--+=+α ββαβαβαβαβαβαβαβαβαβαβαctg ctg ctg ctg ctg tg tg tg tg tg ±?= ±?±= ±=±±=±1 )(1)(sin sin cos cos )cos(sin cos cos sin )sin(
·倍角公式: ·半角公式: ·正弦定理:·余弦定理: ·反三角函数性质: 高阶导数公式——莱布尼兹(Leibniz)公式:中值定理与导数应用: 曲率: 定积分的近似计算: 定积分应用相关公式: 空间解析几何和向量代数: 多元函数微分法及应用 微分法在几何上的应用: 方向导数与梯度: 多元函数的极值及其求法: 重积分及其应用: 柱面坐标和球面坐标: 曲线积分: 曲面积分: 高斯公式:
斯托克斯公式——曲线积分与曲面积分的关系:常数项级数: 级数审敛法: 绝对收敛与条件收敛: 幂级数: 函数展开成幂级数: 一些函数展开成幂级数: 欧拉公式: 三角级数: 傅立叶级数: 周期为的周期函数的傅立叶级数: 微分方程的相关概念: 阳光怡茗工作室https://www.360docs.net/doc/5414982904.html, 一阶线性微分方程: 全微分方程: 二阶微分方程: 二阶常系数齐次线性微分方程及其解法:
最全高中数学三角函数公式
定义式 ) ct 函数关系 倒数关系:;; 商数关系:;. 平方关系:;;.诱导公式
公式一:设为任意角,终边相同的角的同一三角函数的值相等: 公式二:设为任意角,与的三角函数值之间的关系: 公式三:任意角与的三角函数值之间的关系: 公式四:与的三角函数值之间的关系: 公式五:与的三角函数值之间的关系: 公式六:及与的三角函数值之间的关系:
记背诀窍:奇变偶不变,符号看象限.即形如(2k+1)90°±α,则函数名称变为余名函数,正弦变余弦,余弦变正弦,正切变余切,余切变正切。形如2k×90°±α,则函数名称不变。 诱导公式口诀“奇变偶不变,符号看象限”意义: k×π/2±a(k∈z)的三角函数值.(1)当k为偶数时,等于α的同名三角函数值,前面加上一个把α看作 锐角时原三角函数值的符号; (2)当k为奇数时,等于α的异名三角函数值,前面加上一个把α看作锐角时原三角函数值的符号。 记忆方法一:奇变偶不变,符号看象限:
记忆方法二:无论α是多大的角,都将α看成锐角. 以诱导公式二为例: 若将α看成锐角(终边在第一象限),则π十α是第三象限的角(终边在第三象限),正弦函数的函数值在第三象限是负值,余弦函数的函数值在第三象限是负值,正切函数的函数值在第三象限是正值.这样,就得到了诱导公式二. 以诱导公式四为例: 若将α看成锐角(终边在第一象限),则π-α是第二象限的角(终边在第二象限),正弦函数的三角函数值在第二象限是正值,余弦函数的三角函数值在第二象限是负值,正切函数的三角函数值在第二象限是负值.这样,就得到了诱导公式四. 诱导公式的应用: 运用诱导公式转化三角函数的一般步骤: 特别提醒:三角函数化简与求值时需要的知识储备:①熟记特殊角的三角函数值;②注意诱导公式的灵活运用;③三角函数化简的要求是项数要最少,次数要最低,函数名最少,分母能最简,易求值最好。
大一高等数学公式(精华整理的)
高等数学公式 1导数公式: 2基本积分表: 3三角函数的有理式积分: 2 22212211cos 12sin u du dx x tg u u u x u u x +==+-=+=, , , a x x a a a ctgx x x tgx x x x ctgx x tgx a x x ln 1)(log ln )(csc )(csc sec )(sec csc )(sec )(22= '='?-='?='-='='2 2 22 11 )(11 )(11 )(arccos 11 )(arcsin x arcctgx x arctgx x x x x +- ='+= '-- ='-= '? ?????????+±+=±+=+=+=+-=?+=?+-==+==C a x x a x dx C shx chxdx C chx shxdx C a a dx a C x ctgxdx x C x dx tgx x C ctgx xdx x dx C tgx xdx x dx x x )ln(ln csc csc sec sec csc sin sec cos 222 22 22 2C a x x a dx C x a x a a x a dx C a x a x a a x dx C a x arctg a x a dx C ctgx x xdx C tgx x xdx C x ctgxdx C x tgxdx +=-+-+=-++-=-+=++-=++=+=+-=????????arcsin ln 21ln 211csc ln csc sec ln sec sin ln cos ln 2 2222222? ????++-=-+-+--=-+++++=+-= ==-C a x a x a x dx x a C a x x a a x x dx a x C a x x a a x x dx a x I n n xdx xdx I n n n n arcsin 22ln 22)ln(221 cos sin 22 2222222 2222222 22 2 22 2 π π
旋转矩阵、欧拉角、四元数
旋转矩阵、欧拉角、四元数比较 旋转矩阵、欧拉角、四元数主要用于: 向量的旋转、坐标系之间的转换、角位移计算、方位的平滑插值计算 各方法比较 任务/性质旋转矩阵欧拉角四元数 在坐标系间(物体和惯性)旋转点能不能(必须转换到矩 阵) 不能(必须转换到矩 阵) 连接或增量旋转能,但经常比四元数 慢,小心矩阵蠕变的情 况 不能能,比矩阵快 插值基本上不能能,但可能遭遇万向锁 或其他问题Slerp提供了平滑插值 易用程度难易难 在内存或文件中存储9个数3个数4个数 对给定方位的表达方式是否唯一是不是,对同一方位有无 数多种方法 不是,有两种方法,它 们互相为互 可能导致非法矩阵蠕变任意三个数都能构成 合法的欧拉角可能会出现误差积累,从而产生非法的四元数 不同的方位表示方法适用于不同的情况。下面是我们对合理选择格式的一些建议: l 欧拉角最容易使用。当需要为世界中的物体指定方位时,欧拉角能大大的简化人机交互, 包括直接的键盘输入方位、在代码中指定方位(如为渲染设定摄像机)、在调试中测试。这个优点不应该被忽视,不要以”优化”为名义而牺牲易用性,除非你去顶这种优化的确有效果。 2如果需要在坐标系之间转换响亮,那么就选择矩阵形式。当然,这并不意味着你就不能用其他格式来保存方位,并在需要的时候转换到矩阵格式。另一种方法是用欧拉角作为方位的”主拷贝”但同时维护一个旋转矩阵,当欧拉角发生改变时矩阵也要同时进行更新。
3 当需要大量保存方位数据(如:动画)时,就使用欧拉角或四元数。欧 拉角将少占用25%的内存,但它在转换到矩阵时要稍微慢一些。如果动画数据需要嵌套坐标系之间的连接,四元数可能是最好的选择。 4 平滑的插值只能用四元数完成。如果你用其他形式,也可以先转换 到四元数然后再插值,插值完毕后再转换回原来的形式。
临界力和欧拉公式
临界力和欧拉公式 杆件所受压力逐渐增加到某个限度时,压杆将由稳定状态转化为不稳定状态。这个压力的限度称为临界力P cr。它是压杆保持直线稳定形状时所能承受的最小压力。 为了计算压杆的稳定性,就要确定临界力的大小。通过实验和理论推导,压杆临界力与各个因素有关: (1) 压杆的材料,P cr与材料的弹性模量E成正比,即 (2)压杆横截面的形状和尺寸,P cr与压杆横截面的轴惯性矩J成正比,即 (3) 压杆的长度,P cr与长度的平方l2成反比,即 (4) 压杆两端的支座形式有关,用一个系数表示,称为支座系数 ,列于表1-10。为计算方便,写成 欧拉计算的结果(此处从略),细长压杆的临界力为 , (1-72) 上式称为欧拉公式。当已知压杆的材料、尺寸和支座形式时,即可由欧拉公式求得临界力 根据欧拉公式,若要提高细长杆的稳定性,可从下列几方面来考虑: (1) 合理选用材料临界力与弹性模量E成正比。钢材的E值比铸铁、铜、铝的大,压杆选用钢材为宜。合金钢的E值与碳钢的E值近似,细长杆选用合金钢并不能比碳钢提高稳定性,但对短粗杆,选用合金钢可提高工作能力。 (2) 合理选择截面形状临界力与截面的轴惯性矩J成正比。应选择J大的截面形状,如圆环形截面比圆形截面合理,型钢截面比矩形截面合理。并且尽量使压杆横截面对两个互相垂直的中性轴的J值相近。如下图中的(a)所示的截面就比(b)好。
(3) 减少压杆长度临界力与杆长平方成反比。在可能的情况下,减小杆的长度或在杆的中部设置支座,可大大提高其稳定性。 (4) 改善支座形式临界力与支座形式有关。固定端比铰链支座的稳定性好,钢架的立柱,其柱脚与底板的联系形式,能提高立柱受压时的稳定性。像下图中所示的(a)的支座形式就比(b)中的要好。 表1-10 压杆长度系数
三角函数和双曲函数公式表
三角函数的定义 直角坐标系中定义 直角三角形定义 a, b, h 为角A的对边、邻边和斜边在笛卡尔平面上f(x) = sin(x) 和f(x) = cos(x) 函数的 图像。 单位圆定义 六个三角函数也可以依据半径为一中心为原点的单位圆来定义。单位圆定义在实际计算上没有大的价值;实际上对多数角它都依赖于直角三角形。但是单位圆定义的确允许三角函数对所有正数和负数辐角都有定义,而不只是对于在 0 和π/2 弧度之间的角。它也提供了一个图像,把所有重要的三角函数都包含了。根据勾股定理,单位圆的等式是: x2+y2=1 对于大于 2π或小于?2π的角度,可直接继续绕单位圆旋转。在这种方式下,正弦和余弦变成了周期为 2π的周期函数:
级数定义 只使用几何和极限的性质,可以证明正弦的导数是余弦,余弦的导数是负的正弦。(在微积分中,所有角度都以弧度来度量)。我们可以接着使用泰勒级数的理论来证明下列恒等式对于所有实数x都成立: 这些恒等式经常被用做正弦和余弦函数的定义。它们经常被用做三角函数的严格处理和应用的起点(比如,在傅立叶级数中),因为无穷级数的理论可从实数系的基础上发展而来,不需要任何几何方面的考虑。这样,这些函数的可微性和连续性便可以单独从级数定义来确立。 在这种形式的表达中,分母是相应的阶乘,分子称为“正切数”,它有一个组合解释:它们枚举了奇数势的有限集合的交错排列(alternating permutation)。
在这种形式的表达中,分母是对应的阶乘,而分子叫做“正割数”,有组合解释:它们枚举偶数势的有限集合的交错排列。 从复分析的一个定理得出,这个实函数到复数有一个唯一的解析扩展。它们有同样的泰勒级数,所以复数上的三角函数是使用上述泰勒级数来定义的。 与指数函数和复数的联系 可以从上述的级数定义证明正弦和余弦函数分别是复指数函数在它的自变量为纯虚数时候的虚数和实数部分: 这个联系首先由欧拉注意到,叫做欧拉公式。在这种方式下,三角函数在复分析的几何解释中变成了本质性的。例如,通过上述恒等式,如果考虑在复平面中 eix 所定义的单位圆,同上面一样,我们可以根据余弦和正弦来把这个圆参数化,复指数和三角函数之间联系就变得更加明显了。 进一步的,这样就可以定义对复自变量 z 的三角函数: 这里 i2=?1还有对于纯实数 x, 微分方程定义 正弦和余弦函数都满足微分方程
关于高等数学公式总结归纳绝对完整版
关于高等数学公式总结归 纳绝对完整版 Last revision on 21 December 2020
高等数学公式大全 导数公式: 基本积分表: 三角函数的有理式积分: 一些初等函数: 两个重要极限: 三角函数公式: a x x a a a ctgx x x tgx x x x ctgx x tgx a x x ln 1)(log ln )(csc )(csc sec )(sec csc )(sec )(22 = '='?-='?='-='='2 2 22 11 )(11 )(11 )(arccos 11 )(arcsin x arcctgx x arctgx x x x x +- ='+= '-- ='-= '? ?????????+±+=±+=+=+=+-=?+=?+-==+==C a x x a x dx C shx chxdx C chx shxdx C a a dx a C x ctgxdx x C x dx tgx x C ctgx xdx x dx C tgx xdx x dx x x )ln(ln csc csc sec sec csc sin sec cos 222 22 22 2C a x x a dx C x a x a a x a dx C a x a x a a x dx C a x arctg a x a dx C ctgx x xdx C tgx x xdx C x ctgxdx C x tgxdx +=-+-+=-++-=-+=++-=++=+=+-=????????arcsin ln 21ln 211csc ln csc sec ln sec sin ln cos ln 2 2222222?????++-=-+-+--=-+++++=+-= ==-C a x a x a x dx x a C a x x a a x x dx a x C a x x a a x x dx a x I n n xdx xdx I n n n n arcsin 22ln 22)ln(2 21 cos sin 22 2222 2222222 22222 2 22 2 π π
(完整版)惯导与GPS坐标转换问题
坐标系问题 一、 常用坐标系 1. 惯性坐标系(i 系) 对牛顿运动定律适用的参考系;研究物体时,选取静止或作匀速直线运动的参考系,牛顿定律才能成立。常用惯性坐标系:日心惯性坐标系、地心惯性坐标系等。 2. 地球坐标系(e 系) 即固连在地球上的坐标系,该坐标系随地球一起转动。地球坐标系原点在地球中心,轴沿地球自转轴方向,x 轴在赤道平面与本初子午线相交;y 轴也位于赤道平面内,与x 、z 轴构成右手直角坐标系。 导航中可用地球坐标系的直角坐标表示也可用经纬度表示。(常见GPS 坐标WGS-84) 3. 地理坐标系(t 系) 地理坐标系也称当地垂线坐标系,原点位于运载体所在点,原点位于运载体所在点,x 轴沿当地纬线切线方向,y 轴沿当地经线切线方向,z 轴沿当地地理垂线方向并与x 、y 轴构成右手直角坐标系。根据坐标轴方向的不同,地理坐标系的方向可选为“东北天”、“北东地”、“北西天”等。 4. 载体坐标系(b 系) 机体坐标系、船体坐标系和弹体坐标系等的统称。原点与载体的质心重合;x 轴沿载体横轴向右,y 轴沿载体纵轴向前,z 轴沿载体竖轴并与x 、y 轴构成右手直角坐标系。 载体的俯仰(纵摇)角,横滚(横摇)角,航向(偏航)角统称为姿态角。载体的姿态角是根据载体坐标系相对地理坐标系来确定的。 二、 坐标系转换(姿态角) 1.方向余弦法 设空间直角坐标系111OX Y Z ,其三轴单位向量分别为111i j k 、、。任一向量R 可均可表示 为: 111111=x y z R R i R j R k ++
绕Y 1旋转k y 绕Z 2旋转k z 这里的分量111x y z R R R 、、为向量R 在三个轴上的投影: 11 111 1cos cos cos R x x R y y R z z R R R R R R θθθ?=?=??=? 式中,111R R R x y z θθθ、、分别为R 与坐标系111OX Y Z 三轴的夹角,将111cos cos cos R R R x y z θθθ、、称为 向量R 在坐标系111OX Y Z 中的方向余弦。 设另一坐标系222OX Y Z ,2X 轴对于111OX Y Z 坐标系的方向余弦为222111cos cos cos x x x x y z θθθ、、; 2Y 轴对于111OX Y Z 坐标系的方向余弦为222111cos cos cos y y y x y z θθθ、、;2Z 轴对于111OX Y Z 坐标 系的方向余弦为222111cos cos cos z z z x y z θθθ、、。那么有: 2 2211122 22111122 2111cos cos cos cos cos cos cos cos cos x x x x y z y y y x y z z z z x y z C θθθθθθθθθ?? ? ? =????? ? 2211R C R = 1R 、2R 为R 在111OX Y Z 、222OX Y Z 中的坐标列向量。 矩阵2 1C 中的九个元素均为两坐标系坐标轴之间的方向余弦,反映了两坐标之间的角位置关系,称2 1C 为从坐标系111OX Y Z 到222OX Y Z 的方向余弦。 2.欧拉角法 两三维直角坐标系之间的方向余弦矩阵有九个元素,由于有六个约束条件,只有三个元素是独立的,这说明任意两个三维直角坐标系之间的角度关系完全可以由三个角度来描述。假定从坐标系000OX Y Z 经由三次旋转可以得到坐标系OXYZ 。 000OX Y Z 111OX Y Z 222OX Y Z OXYZ 变化z x y K K K 、、横滚(横摇)角,俯仰(纵摇)角,, 航向(偏航)角三个角度,可以形成原点与000OX Y Z 相 同的任意三维直角坐标系。即任意一个三维直角坐标系 OXYZ 均可以从000OX Y Z 经过上述三次旋转得到。称三 11 1 122 2 2 T T x y z x y z R R R R R R R R ????==???? 绕X 0旋转k x
欧拉公式
欧拉公式 欧拉公式是指以欧拉命名的诸多公式之一。其中最著名的有,复变函数中的欧拉幅角公式——将复数、指数函数与三角函数联系起来;拓扑学中的欧拉多面体公式;初等数论中的欧拉函数公式。此外还包括其他一些欧拉公式,比如分式公式等等。 中文名 欧拉公式 外文名 Eulers formula 应用 数学 发现人 欧拉 目录 1简介 2分式 3复变函数 4平面几何 5拓扑学 ?空间中的欧拉公式 ?平面上的欧拉公式 6初等数论 7物理学 1简介 (Euler公式)
在数学历史上有很多公式都是欧拉(Leonhard Euler 公元1707-1783年)发现的,它们都叫做欧拉公式,分散在各个数学分支之中。[1] 2分式 当r=0,1时式子的值为0 当r=2时值为1 当r=3时值为a+b+c[2] 3复变函数 ,e是自然对数的底,i是虚数单位。它将指数函数的定义域扩大到复数,建立了三角函数和指数函数的关系,它在复变函数论里占有非常重要的地位,被誉为“数学中的天桥”。 的证明: 因为 … 在 的展开式中把x换成±ix.
所以 将公式里的x换成-x,得到: ,然后采用两式相加减的方法得到: , .这两个也叫做欧拉公式。将 中的x取作π就得到: .这个恒等式也叫做欧拉公式,它是数学里最令人着迷的一个公式,它将数学里最重要的几个数字联系到了一起:两个超越数:自然对数的底e[1] ,圆周率π,两个单位:虚数单位i和自然数的单位1,以及被称为人类伟大发现之一的0。数学家们评价它是“上帝创造的公式”。 [2] 4平面几何 设△ABC的外心为O,内心为I,外接圆半径为R,内切圆半径为r,又记外心、内心的距离OI为d,则有 (1)式称为欧拉公式. 为了证明(1)式,我们现将它改成
(完整版)大学高数公式大全
高等数学公式 导数公式: 基本积分表: 三角函数的有理式积分: 2 22212211cos 12sin u du dx x tg u u u x u u x += =+-=+=, , , a x x a a a ctgx x x tgx x x x ctgx x tgx a x x ln 1)(log ln )(csc )(csc sec )(sec csc )(sec )(2 2 = '='?-='?='-='='2 2 22 11 )(11 )(11 )(arccos 11 )(arcsin x arcctgx x arctgx x x x x +- ='+= '-- ='-= '? ?????????+±+=±+=+=+=+-=?+=?+-==+==C a x x a x dx C shx chxdx C chx shxdx C a a dx a C x ctgxdx x C x dx tgx x C ctgx xdx x dx C tgx xdx x dx x x )ln(ln csc csc sec sec csc sin sec cos 222 22 22 2C a x x a dx C x a x a a x a dx C a x a x a a x dx C a x arctg a x a dx C ctgx x xdx C tgx x xdx C x ctgxdx C x tgxdx +=-+-+=-++-=-+=++-=++=+=+-=????????arcsin ln 21ln 211csc ln csc sec ln sec sin ln cos ln 2 2222222? ????++-=-+-+--=-+++++=+-= ==-C a x a x a x dx x a C a x x a a x x dx a x C a x x a a x x dx a x I n n xdx xdx I n n n n arcsin 22ln 22)ln(221 cos sin 22 2222222 2222222 22 2 22 2 ππ
四元数转化成欧拉角
四元数转化成欧拉角 笔者:奋斗 修改时间:2015.11.23 一. 姿态解算(以匿名版程序为例) 首先,程序中一般用了两种求解姿态的方法,一种为欧拉角法,一种为四元数法。由四元数法将MPU6050的值融合成四元,再由欧拉角法把四元转换成欧拉角送入串级PID 控制器。 (1)欧拉角法静止状态,或者总加速度只是稍微大于g 时,由加计算出的值比较准确。使用欧拉角表示姿态,令Φ,θ和Φ代表ZYX 欧拉角,分别称为偏航角、俯仰角和横滚角。载体坐标系下的 加 速 度(a x B,a y B ,a z B )和参考坐标系下的加速度(a x N, a y N, a z N)之间的关系可表示为(1)。其中 c 和 s 分别代表 cos 和 sin 。 axB,ayB,azB 就是mpu 读出来的三个值。 这个矩阵就是三个旋转矩阵相乘得到的,因为矩阵的乘法可以表示旋转。 axB c c c s s axN ayB c s s s c c c s s s s c ayN azB s s c s c s c c s s c c azN θψθψθφψφθψφψφθψφθφψφθψ φψφθψφθ-????????????=-++????????????+-+?????? (1) 飞行器处于静止状态,此时参考系下的加速度等于重力加速度,即 00xN yN zN a a g a ????????=????????????(2) 把(2)代入(1)可以解得 arctg θ=(3) yB zB a arctg a φ??= ??? (4) 即为初始俯仰角和横滚角,通过加速度计得到载体坐标系下的加速度即可将其解出,偏航角可以通过电子罗盘求出。
棣莫弗定理与欧拉公式
棣莫弗定理与欧拉公式 编写人:刁国龙 审核人:叶新红 学习目标:1、掌握复数三角形式的乘除法运算和棣莫弗定理、欧拉公式,知道在进行复数的 幂运算时采用三角形式和指数形式会使计算变得简便。 2、会进行复数的代数形式、三角形式和指数形式之间的互化。 3、了解复数的指数形式和极坐标形式在电工学中的应用。 学习重点:棣莫弗定理和欧拉公式,复数指数形式和复数的幂运算。 复数的代数形式、三角形式和指数形式间的互化。 学习难点:复数的代数形式、三角形式和指数形式间的互化。 复数在电工学中的应用。 学习过程: 一、 知识链接: 1、 若()1111sin cos θθi r z +=,()2222sin cos θθi r z +=,则=?21z z 因此,复数的积的模等于 ,积的辐角等于 证明:先乘,再用两角和的正弦、余弦公式整理: 2、 若()1111sin cos θθi r z +=,()2222sin cos θθi r z +=,则 =2 1 z z 因此,复数的商的模等于 ,商的辐角等于 证明:先乘,再用两角和的正弦、余弦公式整理: 注意:运用复数的三角形式的乘除法运算时,首先要使每个复数是三角形式。 3、棣莫弗定理 若()θθsin cos i r z +=,则=n z ()+∈N n 证明: 因此,复数的n 次幂的模等于 ,辐角等于
欧拉公式表示复数:(cos sin )z a bi r i θθ=+=+= (复数的指数形式) 5、复数指数形式乘除法则: 若12 12,i i z re z re θ θ==,则12z z ?= ; 1 2 z z = 。 证明: 6、复数指数形式乘方法则: 若,i z re θ=则n z = 证明: 7、复数的极坐标形式: r θ∠表示模为 ,辐角为 的复数。即r θ∠= 复数的极坐标形式的运算法则: (1)1122r r θθ∠?∠= (2) 11 22 r r θθ∠=∠ (其中220r θ∠≠) (3)()n r θ∠= 二、 例题讲解: 例1、 利用复数的三角形式计算下列各式: (1)( )()00 03 2cos30sin 30cos60sin 602i i ?? ++??? ? (2 33cos sin cos sin 4 477i i π πππ? ? ????+-+-? ? ????????
三角函数公式与推导公式
任意 直角三角形 角三角函数 ) 函数关系 倒数关系: 商数关系:
平方关系: 诱导公式 公式一:设 为任意角,终边相同的角的同一三角函数的值相等: 公式二:设 为任意角, 与的三角函数值之间的关系: 公式三:任意角 与的三角函数值之间的关系: 公式四: 与的三角函数值之间的关系: 公式五: 与的三角函数值之间的关系:
公式六: 及 与 的三角函数值之间的关系:
记背诀窍:奇变偶不变,符号看象限.即形如(2k+1)90°±α,则函数名称变为余名函数,正弦变余弦,余弦变正弦,正切变余切,余切变正切。形如2k×90°±α,则函数名称不变。 诱导公式口诀“奇变偶不变,符号看象限”意义: k×π/2±a(k∈z)的三角函数值.(1)当k为偶数时,等于α的同名三角函数值,前面加上一个把α看作锐角时原三角函数值的符号; (2)当k为奇数时,等于α的异名三角函数值,前面加上一个把α看作锐角时原三角函数值的符号。 记忆方法一:奇变偶不变,符号看象限: 记忆方法二:无论α是多大的角,都将α看成锐角. 以诱导公式二为例: 若将α看成锐角(终边在第一象限),则π十α是第三象限的角(终边在第三象限),正弦函数的函数值在第三象限是负值,余弦函数的函数值在第三象限是负值,正切函数的函数值在第三象限是正值.这样,就得到了诱导公式二.以诱导公式四为例: 若将α看成锐角(终边在第一象限),则π-α是第二象限的角(终边在第二象限),正弦函数的三角函数值在第二象限是正值,余弦函数的三角函数值在第二象限是负值,正切函数的三角函数值在第二象限是负值.这样,就得到了诱导公式四. 诱导公式的应用:
三角函数公式(2)
正弦函数(蓝色)十分接近于它的 5 次泰勒级数(粉红色)。 只使用几何和极限的性质,可以证明正弦的导数是余弦,余弦的导数是负的正弦(在微积分中,所有角度都以弧度来度量)。使用泰勒级数,可以继续证明下列恒等式对于所有实数x都成立: 这些恒等式经常被用做正弦和余弦函数的定义。它们经常被用做三角函数的 严格处理和应用的起点(比如,在傅立叶级数中),因为无穷级数的理论可 从实数系的基础上发展而来,不需要任何几何方面的考虑。这样,这些函数 的可微性和连续性便可以单独从级数定义来确立。 其他级数可见于:[1] 这里的 是n次上/下数, 是n次伯努利数, (下面的)是n次欧拉数。 在这种形式的表达中,分母是相应的阶乘,分子称为“正切数”, 它有一个组合解释:它们枚举了奇数势的有限集合的交错排列 (alternating permutation)。 在这种形式的表达中,分母是对应的阶乘,而分子叫做“正割 数”,有组合解释:它们枚举偶数势的有限集合的交错排列。 从复分析的一个定理得出,这个实函数到复数有一个唯一的解析 扩展。它们有同样的泰勒级数,所以复数上的三角函数是使用上 述泰勒级数来定义的。 [编辑]与指数函数和复数的联系 可以从上述的级数定义证明正弦和余弦函数分别是复指数函数 在它的自变量为纯虚数时候的虚数和实数部分:
这个联系首先由欧拉注意到,叫做欧拉公式。在这种方式下, 三角函数在复分析的几何解释中变成了本质性的。例如,通 过上述恒等式,如果考虑在复平面中e i x所定义的单位圆, 同上面一样,我们可以根据余弦和正弦来把这个圆参数化, 复指数和三角函数之间联系就变得更加明显了。 进一步的,这样就可以定义对复自变量z的三角函数: 这里的i2= ?1。还有对于纯实数x, 我们还知道,这种指数过程与周期行为有密 切的联系。 主条目:三角恒等式 三角函数之间存在很多恒等式,其中最著名的是毕达哥拉斯恒等式,它说明对于任何角,正弦的平方加上余弦的平方总是 1。这可从斜边为 1 的直角三角形应用勾股定理得出。用符号形式表示,毕达哥拉斯恒等式为: 更常见的写法是在正弦和余弦符号之后加“2”次幂: 在通常情况下括号可以省略。 另一个关键的联系是和差公式,它根据两个角度自身的正弦和余弦而给 出它们的和与差的正弦和余弦。它们可以用几何的方法使用托勒密的论 证方法推导出来;还可以用代数方法使用欧拉公式得出。 当两个角相同的时候,和公式简化为更简单的等式,称为二倍角公式(或 倍角公式)。 这些等式还可以用来推导积化和差恒等式,以前曾用它把两个数的积变 换成两个数的和而像对数那样使运算更加快速。(利用制好的三角函数 表)