智能机器人语音识别技术
智能机器人语音识别技术
姓名:李占博
学号:201215715
关键词:智能机器人;语音识别;隐马尔可夫模型 DSP
摘要:给出了一种由说话者说出控制命令,机器人进行识别理解,并执行相应动作的实现技术。在此,提出了一种高准确率端点检测算法、高精度定点DSP动态指数定标算法,以解决定点DSP实现连续隐马尔科夫模型CHMM识别算法时所涉及的大量浮点小数运算问题,提高了定点DSP实现的实时性、精度,及其识别率。
关键词:智能机器人;语音识别;隐马尔可夫模型;DSP
1 语音识别概述
语音识别技术最早可以追溯到20世纪50年代,是试图使机器能“听懂”人类语音的技术。按照目前主流的研究方法,连续语音识别和孤立词语音识别采用的声学模型一般不同。孤立词语音识别一般采用DTW动态时间规整算法。连续语音识别一般采用HMM模型或者HMM与人工神经网络ANN相结合。
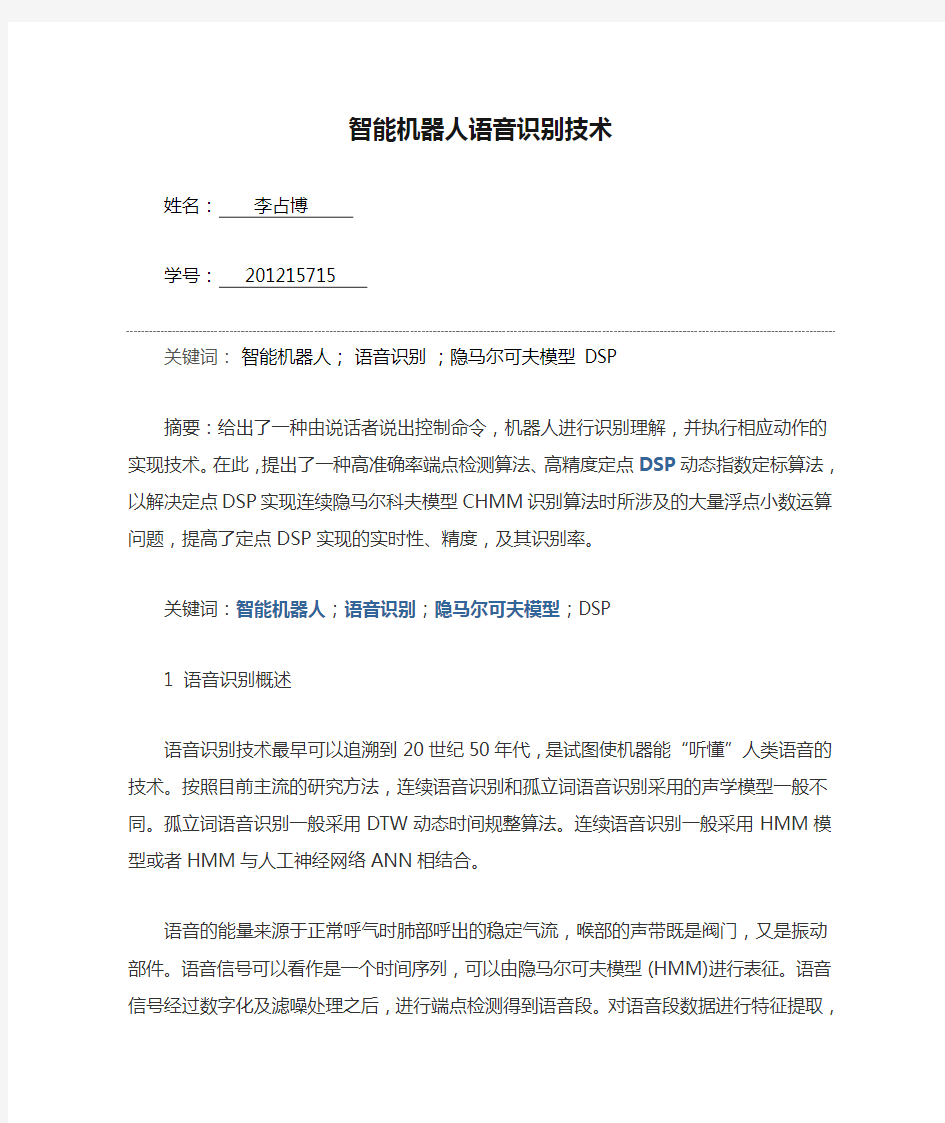
语音的能量来源于正常呼气时肺部呼出的稳定气流,喉部的声带既是阀门,又是振动部件。语音信号可以看作是一个时间序列,可以由隐马尔可夫模型(HMM)进行表征。语音信号经过数字化及滤噪处理之后,进行端点检测得到语音段。对语音段数据进行特征提取,语音信号就被转换成为了一个向量序列,作为观察值。在训练过程中,观察值用于估计HMM 的参数。这些参数包括观察值的概率密度函数,及其对应的状态,状态转移概率等。当参数估计完成后,估计出的参数即用于识别。此时经过特征提取后的观察值作为测试数据进行识别,由此进行识别准确率的结果统计。训练及识别的结构框图如图1所示。
1. 1 端点检测
找到语音信号的起止点,从而减小语音信号处理过程中的计算量,是语音识别过程中一个基本而且重要的问题。端点作为语音分割的重要特征,其准确性在很大程度上影响系统识别的性能。
能零积定义:一帧时间范围内的信号能量与该段时间内信号过零率的乘积。
能零积门限检测算法可以在不丢失语音信息的情况下,对语音进行准确的端点检测,经过450个孤立词(数字“0~9”)测试准确率为98%以上,经该方法进行语音分割后的语音,在进入识别模块时识别正确率达95%。
当话者带有呼吸噪声,或周围环境出现持续时间较短能量较高的噪声,或者持续时间长而能量较弱的噪声时,能零积门限检测算法就不能对这些噪声进行滤除,进而被判作语音进入识别模块,导致误识。图2(a)所示为室内环境,正常情况下采集到的带有呼气噪声的数字“0~9”的语音信号,利用能零积门限检测算法得到的效果示意图。最前面一段信号为呼气噪声,之后为数字“0~9”的语音。
从图2(a)直观的显示出能零积算法在对付能量较弱,但持续时间长的噪音无能为力。
由此引出了双门限能零积检测算法。
所谓的双门限能零积算法指的是进行两次门限判断。第一门限采用能零积,第二门限为单词能零积平均值。也即在前面介绍的能零积检测算法的基础上再进行一次能零积平均值的判决。其中,第二门限的设定依据取决于所有实验样本中呼气噪声的平均能零积及最小的语音单词能零积之间的一个常数。如图2(b)所示,即为图2(a)中所示的语音文件经过双门限能零积检测算法得到的检测结果。可以明显看到,最前一段信号,即呼气噪声已经被视为噪音滤除。
1.2 隐马尔可夫模型HMM
隐马尔可夫模型,即HMM是一种基于概率方法的模式匹配方法。它的应用是20世纪80年代以来语音识别领域取得的重要成果。
一个HMM模型可以表示为:
式中:π为初始状态概率分布,πi=P(q1=θi),1≤i≤N,表示初始状态处于θi的概率;
A为状态转移概率矩阵,(aij)N×N,aij=P(qt+1 =θj|qt=θi),1≤i,j≤N;B为观察值概
率矩阵,B={bj(ot)},j=1,2,…,N,表示观察值输出概率分布,也就是观察值ot处于状态j的概率。
1.3 模型训练
HMM有多种结构类型,并且有不同的分类方法。根据状态转移矩阵(A参数)和观察值输出矩阵(B参数)的不同有不同类型的HMM。
对于CHMM模型,当有多个观察值序列时,其重估公式由参考文档给出,此处不再赘
述。
1.4 概率计算
利用HMM的定义可以得出P(O|λ)的直接求取公式:
式(2)计算量巨大,是不能接受的。Rabiner提出了前向后向算法,计算量大大减小。定义前向概率:
式(2)表示的是初始前向概率,其中bi(o1)为观察值序列处于t=1时刻在状态i时的输出概率,由于它服从连续高斯混合分布,故此值往往极小。根据大量实验观察,通常小于
10-10,此值在定点DSP中已不能用Q格式表示。分析式(3)可以发现,随着时间t的增加,还会有大量的小数之间的乘法加法运算,使得新的前向概率值at+1更小,逐渐趋向于0,定点DSP采用普通的Q格式进行计算时便会负溢出,即便不发生负溢出也会大大丢失精度。因此必须寻找一种解决方法,在不影响DSP实时性的前提下,既不发生负溢出,又能提高精度。
2 DSP实现语音识别
孤立词语音识别一般采用DTW动态时间规整算法。连续语音识别一般采用HMM模型或者HMM与人工神经网络ANN相结合。
为了能实时控制机器人,首先需要考虑的是能够实现实时地语音识别。而考虑到CHMM 的巨大计算量以及成本因素,采用了数据处理能力强大,成本相对较低的定点数字信号处理
器,即定点DSP。本实验采用的是TI公司多媒体芯片TMS320DM642。定点DSP要能准确、实时的实现语音识别,必须考虑2点问题:精度问题和实时性问题。
精度问题的产生原因已经由1.4节详细阐述,这里不再赘述。因此必须找出一种可以提高精度,而又不会对实时性造成影响的解决方法。基于以上考虑,本文提出了一种动态指数定标方法。这种方法类似于科学计数法,用2个32 b单元,一个单元表示指数部分EXP,另一个单元表示小数部分Frac。首先将待计算的数据按照指数定标格式归一化,再进行运算。这样当数据进行运算时,仍然是定点进行,从而避开浮点算法,从而使精度可以达到要
求。
对于实时性问题,通常,语音的频率范围大约是300~3 400 Hz左右,因而本实验采样率取8 kHz,16 b量化。考虑识别的实现,必须将语音进行分帧处理。研究表明,大约在10~30 ms内,人的发音模型是相对稳定的,所以本实验中取32 ms为一帧,16 ms为帧移的时间间隔。
解决实时性问题必须充分利用DSP芯片的片上资源。利用EDMA进行音频数据的搬移,提高CPU利用率。采用PING—PONG缓冲区进行数据的缓存,以保证不丢失数据。CHMM训练的模板放于外部存储器,由于外部存储器较片内存储器的速度更慢,因此开启CACHE。建立DSP/BIOS任务,充分利用BIOS进行任务之间的调度,实时处理新到的语音数据,检测语音的起止点,当有语音数据时再进入下一任务进行特征提取及识别。将识别结果用扬声器播放,并送入到机器人的控制模块。
实验中,采用如图3的程序架构。
3 机器人控制
机器人由自然条件下的语句进行控制。这些语句描述了动作的方向,以及动作的幅度。为了简单起见,让机器人只执行简单命令。由手机进行遥控,DSP模块识别出语音命令,送控制命令到ARM模块,驱动左右机械轮执行相应动作。
3.1 硬件结构
机器人的硬件结构如图4所示。
机器人主要有2大模块,一个是基于DSP的语音识别模块;另一个是基于ARM的控
制模块,其机械足为两滑轮。由语音识别模块识别语音,由控制模块控制机器人动作。3.2 语音控制
首先根据需要,设置了如下几个简单命令:前、后、左、右。机器人各状态之间的转移关系如图5所示。其中,等待状态为默认状态,当每次执行前后或左右转命令后停止,即回到等待状态,此时为静止状态。
语音的训练模板库由4个命令加10个阿拉伯数字共14个组成,如下所示。
命令:“前”、“后”、“左”、“右”;
数字:“0~9”。
命令代表动作的方向,数字代表动作的幅度。当执行前后命令时,数字的单位为dm,执行左右转弯命令时,数字的单位为角度单位的20°。每句命令句法为命令+数字。例如,
语音“左2”表示的含义为向左转弯40°,“前4”表示向前直行4 dm。
机器人语音控制的关键在于语音识别的准确率。表1给出了5个男声样本的识别统计结果。
4 结语
工作中,成功地将CHMM模型应用于定点DSP上,并实现了对机器人的语音控制。解决了CHMM模型巨大计算量及精度与实时性之间的矛盾。提出了一种新的端点检测算
法,对于对抗短时或较低能量的环境噪音具有明显效果。同时需要指出的是,当语音识别指令增多时,则需要定义更多的句法,并且识别率也可能会相应降低,计算量也会相应变大。下一步研究工作应更注重提高大词汇量时的识别率及其鲁棒性。
智能机器人的语音识别
智能机器人的语音识别 语音识别概述 最近,由于其重大的理论意义和实用价值,语音识别已经受到越来越多的关注。到现在为止,多数的语音识别是基于传统的线性系统理论,例如隐马尔可夫模型和动态时间规整技术。随着语音识别的深度研究,研究者发现,语音信号是一个复杂的非线性过程,如果语音识别研究想要获得突破,那么就必须引进非线性系统理论方法。最近,随着非线性系统理论的发展,如人工神经网络,混沌与分形,可能应用这些理论到语音识别中。因此,本文的研究是在神经网络和混沌与分形理论的基础上介绍了语音识别的过程。 语音识别可以划分为独立发声式和非独立发声式两种。非独立发声式是指发音模式是由单个人来进行训练,其对训练人命令的识别速度很快,但它对与其他人的指令识别速度很慢,或者不能识别。独立发声式是指其发音模式是由不同年龄,不同性别,不同地域的人来进行训练,它能识别一个群体的指令。一般地,由于用户不需要操作训练,独立发声式系统得到了更广泛的应用。所以,在独立发声式系统中,从语音信号中提取语音特征是语音识别系统的一个基本问题。 语音识别包括训练和识别,我们可以把它看做一种模式化的识别任务。通常地,语音信号可以看作为一段通过隐马尔可夫模型来表征的时间序列。通过这些特征提取,语音信号被转化为特征向量并把它作为一种意见,在训练程序中,这些意见将反馈到HMM的模型参数估计中。这些参数包括意见和他们响应状态所对应的概率密度函数,状态间的转移概率,等等。经过参数估计以后,这个已训练模式就可以应用到识别任务当中。输入信号将会被确认为造成词,其精确度是可以评估的。整个过程如图一所示。 图1 语音识别系统的模块图
3、理论与方法 从语音信号中进行独立扬声器的特征提取是语音识别系统中的一个基本问题。解决这个问题的最流行方法是应用线性预测倒谱系数和Mel频率倒谱系数。这两种方法都是基于一种假设的线形程序,该假设认为说话者所拥有的语音特性是由于声道共振造成的。这些信号特征构成了语音信号最基本的光谱结构。然而,在语音信号中,这些非线形信息不容易被当前的特征提取逻辑方法所提取,所以我们使用分型维数来测量非线形语音扰动。 本文利用传统的LPCC和非线性多尺度分形维数特征提取研究并实现语音识别系统。 3.1线性预测倒谱系数 线性预测系数是一个我们在做语音的线形预分析时得到的参数,它是关于毗邻语音样本间特征联系的参数。线形预分析正式基于以下几个概念建立起来的,即一个语音样本可以通过一些以前的样本的线形组合来快速地估计,根据真实语音样本在确切的分析框架(短时间内的)和预测样本之间的差别的最小平方原则,最后会确认出唯一的一组预测系数。 LPC可以用来估计语音信号的倒谱。在语音信号的短时倒谱分析中,这是一种特殊的处理方法。信道模型的系统函数可以通过如下的线形预分析来得到: 其中p代表线形预测命令,,(k=1,2,… …,p)代表预测参数,脉冲响应用 h(n)来表示,假设h(n)的倒谱是。那么(1)式可以扩展为(2)式: 将(1)带入(2),两边同时,(2)变成(3)。 就获得了方程(4):
语音识别发展现状与展望
中国中文信息学会第七次全国会员代表大会 暨学会成立30周年学术会议 语音识别发展现状与展望中科院自动化研究所徐波 2011年12月4日
报告提纲 ?语音识别技术现状及态势?语音识别技术的行业应用?语音识别技术研究方向?结论与展望
2010年始语音识别重新成为产业热点?移动互联网的兴起成为ASR最重要的应用环境。在Google引领下,互联网、通信公司纷纷把语音识别作为重要研究方向 –Android系统内嵌语音识别技术,Google语音 翻译等; –iPhone4S 上的Siri软件; –百度、腾讯、盛大、华为等都进军语音识别领 域; –我国语音技术领军企业讯飞2010年推出语音云识别、讯飞口讯 –已有的QQ2011版语音输入等等
成熟度分析-技术成熟度曲线 ?美国市场调查咨询公司Gartner于2011年7月发布《2011新兴技术成熟度曲线》报告:
成熟度分析-新兴技术优先矩阵?Gartner评出了2011年具有变革作用的技术,包括语音识别、语音翻译、自然语言问答等。其中语音翻译和自然语言问答有望在5-10年内获得大幅利用,而语音识别有望在2-5年内获得大幅利用;
三十年语音识别技术发展 ---特征提取与知识方面?MFCC,PLP,CMS,RASTA,VTLN;?HLDA, fMPE,neural net-based features ?前端优化 –融入更多特征信息(MLP、TrapNN、Bottle Neck Features等) ?特征很大特点有些是跟模型的训练算法相匹配?大规模FSN图表示,把各种知识源集中在一起–bigram vs. 4-gram, within word dependencies vs. cross-word
语音识别机器人实验报告
开放实验项目报告 项目名称:语音识别机器人 专业 学生姓名 班级学号 指导教师 指导单位 2012/2013学年第一学期 一.设计背景
在科学日新月异的今天,电子设备的便捷化,人性化,智能化已成为不可逆转的潮流,而语音控制智能,更是其中研究发展的热点。凌阳SPCE061以其便捷的操作,可靠的性能,成为了各位电子爱好者的首选。本实验采用凌阳61板和运动小车(迷你型)模组设计的语音控制小车。凌阳板嵌入小车模型顶部。语音处理技术不仅包括语音的录制和播放,还涉及语音的压缩编码和解码、语音的识别等各种处理技术。本设计的语音控制小车,借助于SPCE061A在语音处理方面的特色,不仅具有前进、后退、左转、右转、停止等基本程序控制功能,而且还具备语音控制功能。 二.总流程图
三.主要模块 1、凌阳SPCE061是继μ’nSP?系列产品SPCE500A等之后凌阳科技推出的又一款16 位结构的微控制器。与SPCE500A不同的是,在存储器资源方面考虑到用户的较少资源的需求以及便于程序调试等功能,SPCE061A里只内嵌32K字的闪存(FLASH )。较高的处理速度使μ’nSP?能够非常容易地、快速地处理复杂的数字信号。因此,与SPCE500A相比,以μ’nSP?为核心的SPCE061A 微控制器是适用于数字语音识别应用领域产品的一种最经济的选择。 其性能如下: A、16 位μ’nSP?微处理器; B、工作电压(CPU) VDD 为2.4~3.6V (I/O) VDDH 为2.4~5.5V C、CPU 时钟:0.32MHz~49.152MHz ; D、内置2K 字SRAM; E、内置32K FLASH; F、可编程音频处理; G、晶体振荡器; H、系统处于备用状态下(时钟处于停止状态),耗电仅为2μA@3.6V ; I、2 个16 位可编程定时器/计数器(可自动预置初始计数值); J、2 个10 位DAC(数-模转换)输出通道; K、32 位通用可编程输入/输出端口; L、14 个中断源可来自定时器A / B ,时基,2 个外部时钟源输入,键唤醒;
人工智能论文 语音识别
信息学院 《人工智能及其应用》课程论文题目:基于神经网络的语音信号识别 作者黄超班级自动08-1BF班 系别信息学院专业自动化 完成时间 2011.6.12
基于神经网络的语音信号识别 摘要 语言是人类之间交流信息的主要手段之一,自电脑发明以来,人们就一直致力于使电 脑能够理解自然语言。语音识别技术是集声学、语音学、语言学、计算机、信息处理和人工 智能等诸领域的一项综合技术,应用需求十分广阔,长期以来一直是人们研究的热点。 神经网络是在现代科学研究成果的基础上提出来的模拟人脑结构机制的一门新兴科 学,它模拟了人类神经元活动的原理,具有自学习、联想、对比、推理和概括能力,为很好 地解决语音识别这样一个复杂的模式分类问题提供了新的途径。 本文针时语音识别的特点.对BP神经网络在语音识别技术中的应用进行了探索性研究, 进而结合人工智能领域较为有效的方法——遗传(GA)算法。针对传统BP算法识别准确率高 但训练速度慢的缺点,对BP网络进行改进,构建了一种基于遗传神经网络的语音识别算法(GABP),并建立相应的语音识别系统。仿真实验表明,该算法有效地缩短了识别时问,提 高了网络训练速度和语音的识别率。 关键词:语音识别,神经网络,遗传算法,遗传神经网络,BP网络 THE RSREARCH OF SPEECH RECOGNITION BASED ON THE NEURAL NETWORK ABSTRACT Language is one of the most important means of exchanging information among the mankind.Since the computer was invented,many scientists have been devoted to enabling the computer to understand the natural language.Speech recognition is a comprehensive technology of such areas as acoustics,phonetics,linguistics,computer science,information processing and artificial intelligence,which can be used widely.The research of speech recognition technology has been focused by the world for a long time.The neural network is a new developing science,which simulates the mechanism of human brain and was putted forward by the developing of modern science.It is not the overall description of human brain,but the abstract,simulation and simplifying of the physical neural networks of human beings. The purpose of the research in this area is exploring the human brain mechanisms in information processing,storing and searching.If people can understand these mechanisms,a new way for the research of artificial intelligence,information processing and etc.
人工智能与语言识别
人工智能与语言识别 摘要:语言是人类之间交流信息的主要手段之一,自电脑发明以来,人们就一直致力于使电脑能够理解自然语言。语音识别技术是集声学、语音学、语言学、计算机、信息处理和人工智能等诸领域的一项综合技术,应用需求十分广阔,长期以来一直是人们研究的热点。神经网络是在现代科学研究成果的基础上提出来的模拟人脑结构机制的一门新兴科学。本文针时语音识别的特点,对BP神经网络在语音识别技术中的应用进行了探索性研究,进而结合人工智能领域较为有效的方法——遗传(GA)算法。该算法有效地缩短了识别时问,提高了网络训练速度和语音的识别率。 关键词:语言识别;神经网络;遗传算法;BP网络 Artificial Intelligence and Speech Recognition Abstract:Language is one of the most important means of exchanging information among the mankind.Since the computer was invented,many scientists have been devoted to enabling the computer to understand the natural language.Speech recognition is a comprehensive technology of such areas as acoustics,phonetics,linguistics,computer science,information processing and artificial intelligence,which can be used widely.The research of speech recognition technology has been focused by the world for a long time.The neural network is a new developing science,which simulates the mechanism of human brain and was putted forward by the developing of modern science. This paper mainly studies the application of the BP neural network in the research of speech recognition.The training speed can be accelerated by the method and the recognition performance is also promoted. Key words:speech recognition;neural network;genetic algorithm;BP network 正文 一、语言识别的概述 随着计算机技术的发展,人与机器之间的交流也越来越广泛和深入,计算机己经渗透到人们生活的各个方面。在现代社会中,人们逐渐习惯借助计算机来完成各项事务。在这种情况下,如何让计算机智能化地与人进行通信,使人机交互更加自然方便成为现代计算机科学的重要研究课题之一。 二、语言识别的基本原理 语音识别(Speech Recognition)主要是指让机器听懂人说的话,即在各种情况下,准确地识别出语音的内容,从而根据其信息,执行人的各种意图。现代语音识别技术以神经网络为主要发展趋势,进入20世纪90年代以来,神经网络已经成为语音识别的一条重要途径。人工神经网络(ANN)是采用大量的简单处理单元广泛连接起来构成的一种复杂信息处理网络。网络的训练学习是应用一系列输入矢量,通过已确定的算法逐步调整网络的权值,最终达到期望的目标。BP神经网络是神经网络中前向神经网络的核心部分,BP算法的学习过程由信号的正向传播和误差的反向传播组成。大部分基于神经网络的语音识别系统实现识别功能都要经过从特征参数提取到应用识别算法进行识别的过程。 三、语音识别中的BP网络构造
语音识别技术
目前主流的语音识别技术是基于统计模式识别的基本理论。一个完整的语音识别系统可大致分为三部分: (1)语音特征提取: (2)声学模型与模式匹配(识别算法) (3)语义理解:计算机对识别结果进行语法、语义分析。 语音识别技术,也被称为自动语音识别Automatic Speech Recognition,(ASR), 语音识别的发展简史 1952年AT& T Bell实验室实现了一个单一发音人孤立发音的十个英文数字的语音识别系统,到现在的人机语音交互。语音识别研究从二十世纪50年代开始到现在历半个多世纪的蓬勃发展,在这期间获得了巨大的进展。 现代语音识别技术研究重点包括即兴口语的识别和理解,自然口语对话,以及多语种的语音同声翻译。 语音识别应用的特点 1.语音识别系统必须覆盖的功能包括: (1)语音识别系统要对用户有益(希望它是能检测到的)。例如提高生产率,容易使用,更好的人机界面,或更自然的信息交流模式。 (2)语音识别系统要对用户“友好”。这种“友好”的含义是:用户在和系统进行语音对话时感到舒适;系统的语音提示既有帮助,又很亲近。 (3)语音识别系统必须有足够的精度 (4)语音识别系统要有实时处理能力;例如系统对用户询问的响应时间要很短。 2. 语音识别错误的处理 有以下四种方式可以处理这个问题。 (1)错误弱化法。这种处理仅仅花费用户很少一点时间,对用户几乎没什么其它不利影响。 (2)错误自检纠正法 系统利用已知任务的限制自动地检测并纠正错误。 (3)确认或多层次判定
(4)拒绝/转向人工座席。系统对其中通常较易导致系统识别错误的极少部分语音指令拒绝做出识别决定,而是将其转给人工座席。 在很多情况下,语音识别技术可以充分发挥出RFID的潜能: 1.积压产品、脱销产品 2.被废弃、被召回或已过期产品 3.回收的商品 4.促销产品 RFID系统在利用原有语音导向投资的情况下可以大大增加收益 语音识别技术在邮件分拣中的应用 现代化分拣设备在邮政上的应用大大提高了邮件处理的效率。但是,并不是所有的邮件都能上分拣机处理,那些需要人工处理的邮件成了邮政企业实现自动化的瓶颈。邮政使用人工标码技术以及先进的计算机软件 系统来处理不能上机的邮件,仍需要大量的劳动力。 由MailCode公司开发并准备申请专利的Spell-ItTM软件技术通过提高系统数据库能力的方式对语音识别自动化设备进行了革命性的变革。这种技术提供了无限的数据库能力,并且保证分拣速度不会因数据库的增大而减小。由各大语音引擎公司开发的系统还支持世界上的各种主要语言,这样,语音技术就成为世界性的产品。 以英语语音识别系统为例,系统建立了36个可识别字符26个字母加上0~9的10个数字,同时还建立了一套关键词。Spell-It软件使用这些字符来识别成千上万的口语词汇和无数的词语组合。 对于大公司的邮件收发中心来说,使用MailCode公司的Spell-It软件技术,分拣员实际上只需发出几个字符的音来找到和数据库中相对应的词。例如:碰到了寄给Joseph Schneider的邮件,操作员只需发出“J”、“S”、“C”和“H”几个音就可以得到准确的分拣信息。 姓名和邮箱编码:Jennifer Schroeder, 软件工程部;Joseph Schneider, 技术操作部;Josh Schriver, 技术操作部,因为这三个姓名全都符合(J,S,C,H)的发音标准。邮件中心的操作员知道邮件实际上是寄给Joseph Schneider的,就可以把邮件投入Joseph Schneide的信箱了。 邮局要把邮件按投递路线分发,分拣员必须熟悉长长的投递段列表以及各种各样的国际邮件投递信息。Spell-It技术把地址、投递路线等信息都存入了系统,这样就大大方便了分拣工作。 例如,有一件寄往Stonehollow 路2036号的邮件。使用语音识别技术,分拣员仅仅需要发出“2”、“0”、“S”、“T”和“O”几个音,如表2所示,数据库就会给出所有可能和这几
2020年公需课程-人工智能技术与应用(一骨骼识别、二人脸识别、三步态识别、四虹膜识别、五语音识别)
人工智能技术与应用(练习一:骨骼识别) 1、(单选,10分)单人骨骼识别不需要包含如下处理过程() A 、关键点区分 B 、关键点检测 C 、关键点串联 D 、结果输出 答案:A 2、(单选,10分)以下哪项不属于目前常用的人体骨架关键点的定义方式() A 、18 个关键点 B 、14 个关键点 C、25 个关键点 D、7 个关键点 答案:D 3、(单选,10分) 以下哪种环境/ 条件有助于提升人体骨骼识别的准确率() A 、肢体遮挡 B 、光照良好 C 、观察视角变化 D 、衣服包裹严实 答案:B 4、(单选,10分)人体骨骼识别与哪项技术的关联程度最低() A 、区块链技术 B 、视频采集技术 C 、图像处理技术 D 、人工智能相关技术 答案:A 5、(单选,10分)以下哪项不是骨骼识别系统包含的功能() A 、图像采集 B 、图像预处理 C 、图像模糊化 D 、骨骼关键点识别 答案:C 6、(单选,10分)以下哪项不属于造成多人骨骼识别较单人骨骼识别更具挑战的因素() A 、关键点区分性弱 B 、背景中的局部区域容易混淆 C 、人与人的重叠 D 、需串联的关键点个数增多 答案:D
7、(单选,10分)当前的骨骼识别技术不适用于以下哪个应用场景() A 、身份认证 B 、视频监控 C 、体感游戏 D 、运动员辅助训练答案:A 8、(单选,10分) 8. 以下哪家公司不属于人体骨骼识别领域的代表企业() A 、商汤科技 B 、旷视科技 C 、携程旅行网络科技 D 、凌感科技 答案:C 9、(单选,10分)人的头颈、肩部、手肘关节、手腕关节、髋关节、膝关节等可作为人体骨骼关键点。 A 、正确 B 、错误 答案:A 10、(单选,10 分)在自顶向下方法中,人体目标检测需要用方框标记出一块尽可能大的区域。 A 、正确 B 、错误 答案:B 人工智能技术与应用(练习二:人脸识别) 1、(单选,10分) 以下哪项不是人脸识别系统包含的功能() A 、图像采集 B 、图像预处理 C 、图像模糊化 D 、匹配比对 答案:C 2、(单选,10分) 未来人脸识别的个人隐私防护不包含() A 、随意授权自己的人脸信息 B 、立法保障“脸权” C 、规范化人脸数据的使用方法 D 、打击隐私泄露行为 答案:A 3、(单选,10分) 以下哪项不属于生物识别技术() A 、人脸识别 B 、车牌识别 C 、掌纹识别 D 、语音识别 答案:B
语音识别机器人的设计—毕业论文
毕业论文(设计) 题目语音识别机器人的设计 系部电子信息工程 专业电子信息工程年级 06级学生姓名 学号 指导教师 语音识别机器人的设计
【摘要】语音识别可划分为训练和识别两个过程。在第一阶段,语音识别系统对人类的语言进行学习,把学习内容组成语音库存储起来,在第二阶段就可以把当前输入的语音在语音库中查找相应的词义或语义。凌阳16位SPCE061A单片机内嵌32K字闪存,2K字SRAM,内置10位ADC、DAC,有多达14个的中断源。它的CPU内核采用16位具有DSP功能的微处理器芯片, 而且CPU可最高工作在49MHz的主频下,能够非常容易地、快速地处理复杂的数字信号,因此与其他类型的单片机相比,在数字语音处理方面SPCE061A更具有优势。基于SPCE061A设计了一个具有语音识别功能的机器人。经过训练,训练人可使用各种命令让机器人完成许多有趣的动作,使得人机交互更具智能化。 【关键词】SPCE061A单片机语音识别机器人
The Design of the Speech Recognition Robot 【Abstract】The speech recognition is divided into two stages, namely, training and recognition. At the first stage, the speech recognition system learns about the language and stores what it a speech database. Then at the next stage, the meaning of each inputted speech can immediately be found in the speech database.Sunplus 16-bit SPCE061ASCM is embedded with 32K word Flash and 2K word SRAM, with built-in 10-bit ADC and DAC as well as more than 14 interrupt sources. The core of its CPU is a 16-bit microprocessor chip which of DSP. Besides, the CPU can work with a frequency up to 49 MHz, and process complex digital signals easily and quickly. Therefore, compared with other types of SCM, SPCE061A speech processing. Based on SPCE061A, a speech recognition robot designed. After training, the robot can complete many interesting actions according to the orders, which makes the -computer interaction more intelligent. 【Key words】SPCE061A SCM Speech Recognition Robot 目录
语音识别基本知识及单元模块方案设计
语音识别是以语音为研究对象,通过语音信号处理和模式识别让机器自动识别和理解人类口述的语言。语音识别技术就是让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术。语音识别是一门涉及面很广的交叉学科,它与声学、语音学、语言学、信息理论、模式识别理论以及神经生物学等学科都有非常密切的关系。语音识别技术正逐步成为计算机信息处理技术中的关键技术,语音技术的应用已经成为一个具有竞争性的新兴高技术产业。 1语音识别的基本原理 语音识别系统本质上是一种模式识别系统,包括特征提取、模式匹配、参考模式库等三个基本单元,它的基本结构如下图所示: 未知语音经过话筒变换成电信号后加在识别系统的输入端,首先经过预处理,再根据人的语音特点建立语音模型,对输入的语音信号进行分析,并抽取所需的特征,在此基础上建立语音识别所需的模板。而计算机在识别过程中要根据语音识别的模型,将计算机中存放的语音模板与输入的语音信号的特征进行比较,根据一定的搜索和匹配策略,找出一系列最优的与输入语音匹配的模板。然后根据此模板的定义,通过查表就可以给出计算机的识别结果。显然,这种最优的结果与特征的选择、语音模型的好坏、模板是否准确都有直接的关系。2语音识别的方法 目前具有代表性的语音识别方法主要有动态时间规整技术(DTW)、隐马尔可夫模型(HMM)、矢量量化(VQ)、人工神经网络(ANN)、支持向量机(SVM)等方法。 动态时间规整算法(Dynamic Time Warping,DTW)是在非特定人语音识别中一种简单有效的方法,该算法基于动态规划的思想,解决了发音长短不一的模板匹配问题,是语音识别技术中出现较早、较常用的一种算法。在应用DTW算法进行语音识别时,就是将已经预处理和分帧过的语音测试信号和参考语音模板进行比较以获取他们之间的相似度,按照某种距离测度得出两模板间的相似程度并选择最佳路径。 隐马尔可夫模型(HMM)是语音信号处理中的一种统计模型,是由Markov链演变来的,所以它是基于参数模型的统计识别方法。由于其模式库是通过反复训练形成的与训练输出信号吻合概率最大的最佳模型参数而不是预先储存好的模式样本,且其识别过程中运用待识别语音序列与HMM参数之间的似然概率达到最大值所对应的最佳状态序列作为识别输出,因此是较理想的语音识别模型。 矢量量化(Vector Quantization)是一种重要的信号压缩方法。与HMM相比,矢量量化主要适用于小词汇量、孤立词的语音识别中。其过程是将若干个语音信号波形或特征参数的标量数据组成一个矢量在多维空间进行整体量化。把矢量空间分成若干个小区域,每个小区域寻找一个代表矢量,量化时落入小区域的矢量就用这个代表矢量代替。矢量量化器的设计就是从大量信号样本中训练出好的码书,从实际效果出发寻找到好的失真测度定义公式,设计出最佳的矢量量化系统,用最少的搜索和计算失真的运算量实现最大可能的平均信噪比。在实际的应用过程中,人们还研究了多种降低复杂度的方法,包括无记忆的矢量量化、有记忆的矢量量化和模糊矢量量化方法。 人工神经网络(ANN)是20世纪80年代末期提出的一种新的语音识别方法。其本质上是一
深度解析智能语音机器人的常见问题
深度解析智能语音机器人的常见问题 一般智能语音机器人会自动处理以下问题:语音识别、语义分析、智能交互,实现对话交互策略。人工辅助过于复杂或者必须通过人工干预的通话转交给对应技能座席。今天我们一起来了解下深度解析电话机器人的常见问题。 一、什么是智能语音机器人? 智能语音机器人是一种运用于电话营销领域的电话机器人,它是通过ASR(语音识别)和TTS(文本转录音)模拟真人和用户通话,可以真人预先录音,用户很难察觉到是机器人。 二、市面上ASR接口有哪些? 智能语音机器人主要ASR接口供应商有科大讯飞,百度语音识别,阿里云语音识别,腾讯语音识别等,有SDK/API/MRCP类接口。智能语音机器人采用的是在讯飞研究院科学家研制的*版语音识别引擎,能精准识别反映客户意愿的词汇,快速划分非意向与意向,语音识别率达到了95%,不误判客户意向,避免浪费您的宝贵号码资源、浪费人力跟进非意向客户,同时对环境噪音、客户口音均有良好的适应能力。 三、智能语音机器人由哪些部分组成? 语音识别引擎≠电销机器人,语音识别能力是电销机器人重要的组成,但并非*,智能语音机器人还需要将呼叫平台(保证呼叫稳定)、电话线路、话术体系、操作后台集成在云端,达到直接在web上登陆操作目的,至此可以理解为一台“汽车”的硬件造好了。 但是汽车的性能怎么样,还需要检测关键技术指标、跑几下(各种测试),配置上软件(电销机器人的话术还没有配好)。因此,用讯飞技术≠智能语音机器人,如果用**技术就等于**牌子,那么所有的电脑都应该叫intel英特尔电脑,还有戴尔、联想什么事。
四、智能语音机器人为什么按路收费? 一个智能语音机器人研发好了,理论上可以支持N路并发(开一个接口就是一个机器人),主要的瓶颈是语音识别。免费的ASR一般*几万次,量大是需要付费使用的。一个智能语音机器人对接一路识别语音引擎(向ASR公司付费)、对应一条外呼线路(通信运营商向你收取),因此按路收费。有了这些机器人才能听懂话、打出去电话。 五、智能语音机器人话术系统是怎样一回事? 做话术≠做录音,如果没有对客户说话的正确理解,只是播放录音,没有互动,体验怎么能好。智能语音机器人建立在数据的基础上,智能语音机器人话术定制涉及到机器人语言设计、知识库的丰富,方便机器人理解,同时经过大量测试,保证准确理解客户的回复。 总结 智能语音机器人对于销售工作的开展无疑是提高效率的,工具虽然好,但也要了解怎么使用,更要知道正确使用的方向。
人工智能语音识别发展报告
人工智能语音识别发展报告Report of Artificial I ntelligence Development
目录 1.语音识别 (3) 1.1.语音识别概念 (3) 1.2.语音识别发展历史 (4) 1.3.人才概况 (6) 1.4.论文解读 (8) 1.5.语音识别进展 (173)
语音识别 1.语音识别 1.1.语音识别概念 语音识别是让机器识别和理解说话人语音信号内容的新兴学科,目的是将语 音信号转变为文本字符或者命令的智能技术,利用计算机理解讲话人的语义内容, 使其听懂人类的语音,从而判断说话人的意图,是一种非常自然和有效的人机交流方式。它是一门综合学科,与很多学科紧密相连,比如语言学、信号处理、计算机科学、心理和生理学等[8]。 语音识别首先要对采集的语音信号进行预处理,然后利用相关的语音信号处 理方法计算语音的声学参数,提取相应的特征参数,最后根据提取的特征参数进行 语音识别。总体上,语音识别包含两个阶段:第一个阶段是学习和训练,即提取语音 库中语音样本的特征参数作为训练数据,合理设置模型参数的初始值,对模型各个参 数进行重估,使识别系统具有最佳的识别效果;第二个阶段就是识别,将待识别语音信 号的特征根据一定的准则与训练好的模板库进行比较,最后通过一定的识别算法得出识 别结果。显然识别结果的好坏与模板库是否准确、模型参数的好坏以及特征参数的选择 都有直接的关系。 实际上,语音识别也是一种模式识别,其基本结构如下图所示。和一般模式 识别过程相同,语音识别包括如图所示3 个基本部分。实际上,由于语音信息的复 杂性以及语音内容的丰富性,语音识别系统要比模式识别系统复杂的多。 图 6-1 语音识别系统框架 其中,预处理主要是对输入语音信号进行预加重和分段加窗等处理,并滤除其 中的不重要信息及背景噪声等,然后进行端点检测,以确定有效的语音段。特征参数 提取是将反映信号特征的关键信息提取出来,以此降低维数减小计算量,
智能机器人语音识别技术
智能机器人语音识别技术 姓名:李占博 学号:201215715
关键词:智能机器人;语音识别;隐马尔可夫模型 DSP 摘要:给出了一种由说话者说出控制命令,机器人进行识别理解,并执行相应动作的实现技术。在此,提出了一种高准确率端点检测算法、高精度定点DSP动态指数定标算法,以解决定点DSP实现连续隐马尔科夫模型CHMM识别算法时所涉及的大量浮点小数运算问题,提高了定点DSP实现的实时性、精度,及其识别率。 关键词:智能机器人;语音识别;隐马尔可夫模型;DSP 1 语音识别概述 语音识别技术最早可以追溯到20世纪50年代,是试图使机器能“听懂”人类语音的技术。按照目前主流的研究方法,连续语音识别和孤立词语音识别采用的声学模型一般不同。孤立词语音识别一般采用DTW动态时间规整算法。连续语音识别一般采用HMM模型或者HMM与人工神经网络ANN相结合。 语音的能量来源于正常呼气时肺部呼出的稳定气流,喉部的声带既是阀门,又是振动部件。语音信号可以看作是一个时间序列,可以由隐马尔可夫模型(HMM)进行表征。语音信号经过数字化及滤噪处理之后,进行端点检测得到语音段。对语音段数据进行特征提取,语音信号就被转换成为了一个向量序列,作为观察值。在训练过程中,观察值用于估计HMM 的参数。这些参数包括观察值的概率密度函数,及其对应的状态,状态转移概率等。当参数估计完成后,估计出的参数即用于识别。此时经过特征提取后的观察值作为测试数据进行识别,由此进行识别准确率的结果统计。训练及识别的结构框图如图1所示。
1. 1 端点检测 找到语音信号的起止点,从而减小语音信号处理过程中的计算量,是语音识别过程中一个基本而且重要的问题。端点作为语音分割的重要特征,其准确性在很大程度上影响系统识别的性能。 能零积定义:一帧时间范围内的信号能量与该段时间内信号过零率的乘积。 能零积门限检测算法可以在不丢失语音信息的情况下,对语音进行准确的端点检测,经过450个孤立词(数字“0~9”)测试准确率为98%以上,经该方法进行语音分割后的语音,在进入识别模块时识别正确率达95%。 当话者带有呼吸噪声,或周围环境出现持续时间较短能量较高的噪声,或者持续时间长而能量较弱的噪声时,能零积门限检测算法就不能对这些噪声进行滤除,进而被判作语音进入识别模块,导致误识。图2(a)所示为室内环境,正常情况下采集到的带有呼气噪声的数字“0~9”的语音信号,利用能零积门限检测算法得到的效果示意图。最前面一段信号为呼气噪声,之后为数字“0~9”的语音。
Q博士语音识别机器人制作
语音识别机器人制作 编辑:robotain 来源:网络2009-12-06 发表评论 方案简介说明书 1 方案概述 语音识别机器人可以充分发挥学生的创新能力,增加学生的动手实践能力,增加学生学习单片机的兴趣爱好。本方案以SPCE061A 单片机为核心,改装市场上的玩具机器人,使改装后的机器人具有语音识别能力,根据识别的语音完成跳舞等动作,这也是智能机器人的一个方面。 1.1 设计要求 利用SPCE061A 单片机、机器人机体(包括2 个用于走路的电机、1 个用于头部旋转的电机、1 个用于加速1 个用于弹射的电机等),要求语音识别机器人具有下述功能: 1. 通过语音命令对其进行控制。 2. 两种跳舞模式。 3. 走步功能、转向功能、转头功能。 4. 发射飞盘功能。 1.2 技术要求 1. 要求语音识别机器人可以识别15 条命令。 2. 要求语音识别机器人具有2 种跳舞模式。 2 方案设计简介 2.1 硬件框图 系统以SPCE061A 为核心,结合机器人机体,如下图所示。
2.2 功能框图 SPCE061A 应用方案 SPCE061A 在语音识别机器人中的应用
在现代社会机器人这个词语已经不再新鲜,而且形形色色的机器人出现在我们的日常生活中。为了提高广大单片机爱好者学习单片机的兴趣与爱好,凌阳科技大学计划教育推广中心推出了应用SPCE061A 控制的兴趣产品语音识别机器人,本文对语音识别机器人的软硬件制作进行介绍。 1 引言 为了提高广大单片机爱好者学习单片机的兴趣,凌阳科技大学计划教育推广中心推出了应用SPCE061A 作为主控制器,外加电机驱动电路制作的语音识别机器人。该机器人采用特定人语音识别对机器人进行控制,可以完成向前走、倒退、左转、右转、跳两首舞曲、向左瞄准、向右瞄准、发射、连续发射等功能。该语音识别机器人可以大大提高在校学生学习单片机的兴趣。 2 设计要求 2.1 设计要求 利用SPCE061A 单片机、机器人机体(包括2 个用于走路的电机、1 个用于头部旋转的电机、1个用于加速1 个用于弹射的电机等),要求语音识别机器人具有下述功能: 通过语音命令对其进行控制。 两种跳舞模式。 走步功能、转向功能、转头功能。 发射飞盘功能。 2.2 技术要求 要求智能机器人可以识别15 条命令。 要求智能机器人具有2 种跳舞模式。 模组特性简介 3.1 SPCE061A 特性简介 SPCE061A 是凌阳科技研发生产的性价比很高的一款十六位单片机,使用它可以非常方便灵活的实现语音的录放系统,该芯片拥有8 路10 位精度的ADC,其中一路为音频转换通道,并且内置有自动增益电路。这为实现语音录入提供了方便的硬件条件。两路10 精度的DAC,只需要外接功放(SPY0030A)即可完成语音的播放。另外凌阳十六位单片机具有易学易用的效率较高的一套指令系统和集成开发环境。在此环境中,支持标准C 语言,可以实现C 语言与凌阳汇编语言的互相调用,并且,提供了语音录放的库函数,只要了解库函数的使用,就会很容
语音识别技术文献综述
语音识别技术综述 The summarization of speech recognition 张永双 苏州大学 摘要 本文回顾了语音识别技术的发展历史,综述了语音识别系统的结构、分类及基本方法,分析了语音识别技术面临的问题及发展方向。 关键词:语音识别;特征;匹配 Abstact This article review the courses of speech recognition technology progress ,summarize the structure,classifications and basic methods of speech recognition system and analyze the direction and the issues which speech recognition technology development may confront with. Key words: speech recognition;character;matching 引言 语音识别技术就是让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术。语音识别是一门交叉学科,所涉及的领域有信号处理、模式识别、概率论和信息论、发声机理和听觉机理、人工智能等等,甚至还涉及到人的体态语言(如人民在说话时的表情手势等行为动作可帮助对方理解)。其应用领域也非常广,例如相对于键盘输入方法的语音输入系统、可用于工业控制的语音控制系统及服务领域的智能对话查询系统,在信息高度化的今天,语音识别技术及其应用已成为信息社会不可或缺的重要组成部分。 1.语音识别技术的发展历史 语音识别技术的研究开始二十世纪50年代。1952年,AT&Tbell实验室的Davis等人成功研制出了世界上第一个能识别十个英文数字发音的实验系统:Audry系统。
语音识别技术原理及应用
语音AgentNet 的整体实现张宇伟
摘要: 本文论述了一个人机对话应用的实现(我命名它为AgentNet)。其应用实例为一种新的整合了语音技术的智能代理网络服务。 服务器端开发使用了微软SQL SERVER 7.0技术,客户端使用了微软Agent ,微软Specch SDK5语音合成,和语音识别技术。网络连接使用了SOCKET 技术,并论述了高层网络协议的实现。 [关键词] 人机对话,MS-AGENT,语音合成,语音识别,网络编程 [Abstract] This paper discuss a new actualization of man-machine conversation application, which is based on a modal of network service. And I name this service with the name of AgentNet. The development of this service used Microsoft SQL SERVER 7.0. And the client used the technology of Microsoft Agent, TTS (Text To Speech),SR(Speech Recognition).Also the client and the server connect with SOCKET. On the SOCKET, the paper discuss the development of High-Level net protocol. [Key Words] Man-Machine Conversation, MS-AGENT, TTS , SR ,Net Work Programming
创新创业课程教学案例——语音识别客服机器人
创新创业课程教学案例——语音识别客服机器人
一、导言 客服需求蓬勃增长,传统的客服方式已无法适应企业用工、消费服务等方面的需求。客服需求依据语音识别技术形成了巨大的市场。语音识别是一门交叉学科。近二十年来,语音识别技术取得显著进步,开始从实验室走向市场。人们预计,未来10年内,语音识别技术语音识别将会推动物联网的革命,将进入工业、家电、通信、汽车电子、医疗、家庭服务、消费电子产品,以及可穿戴设备等各个领域。 二、用户痛点 在传统的客服服务中,存在着很多不足,如服务质量把控难、培训成本高、人员离职率高、考核成本高等情况。 三、创新原理 语音识别客服机器人实现了全新的语音识别技术,在识别率、连续服务、渠道 等方面,获得了多个方面的创新(图1),提高了企业的服务水平。 采用深度神经网络算法和自然语言处理技术研发而成,实现机器人多轮对话,识别数百种方言,识别率高。 采用在线学习算法,实现智能机器人自适应、动态、增量式的机器自学习能力,能够精准回复重复性或相似的问题。 采用智能机器人、人工客服、工单等完整的三位一体交互切换客服体系,全天不间断服务,节省客服成本。 采用微信、QQ app、WeblM、SDK、微博等渠道,简单快速的接口服务,提供移动式办公,时刻保持在线沟通,提供一致的客户体验。 多维可视化数据分析,包括效率统计、满意度统计、会话统计、工单统计和访客记录统计等,有利于企业更好地挖掘客户信息。
图1语音识别客服系统架构图 四、产品特点 语音识别客服机器人建立了四位一体交互体系(图2),能够更好地进行服务。它具有以下特点: 7×24小时机器人在线,精准回答客户重复性问题。 桌面网页、移动网页、APP等一键接入、多平台统一平台管理。 多维客服数据分析,客观全面考核客服人员KPI。 移动端APP实现客服人员移动办公,让您与客户时刻保持在线沟通。 图2语音识别客服机器人四位一体交互体系 五、应用场景 行政服务中心、银行、中小企业客服、呼叫中心等。 六、创意激发 AiKF爱客服智能机器人技术在时间、空间、人力等方面获得了重大突破,