地球资源卫星30年航拍图片精选
地球资源卫星30年航拍图片精选
工作时间最长的地球观测卫星在接近29年之后结束了它的任务,围绕地球运转超过15万圈,而且拍摄了大约250万张照片。地球资源卫星5号的工作时间几乎是计划时间的十倍,拯救了地球资源卫星任务的连续性。为了庆祝这颗强大的卫星对于帮助我们了解地球所做的贡献,这里展示了地球资源卫星5号接近30年时间里在太空拍摄到的最令人喜爱的图片。
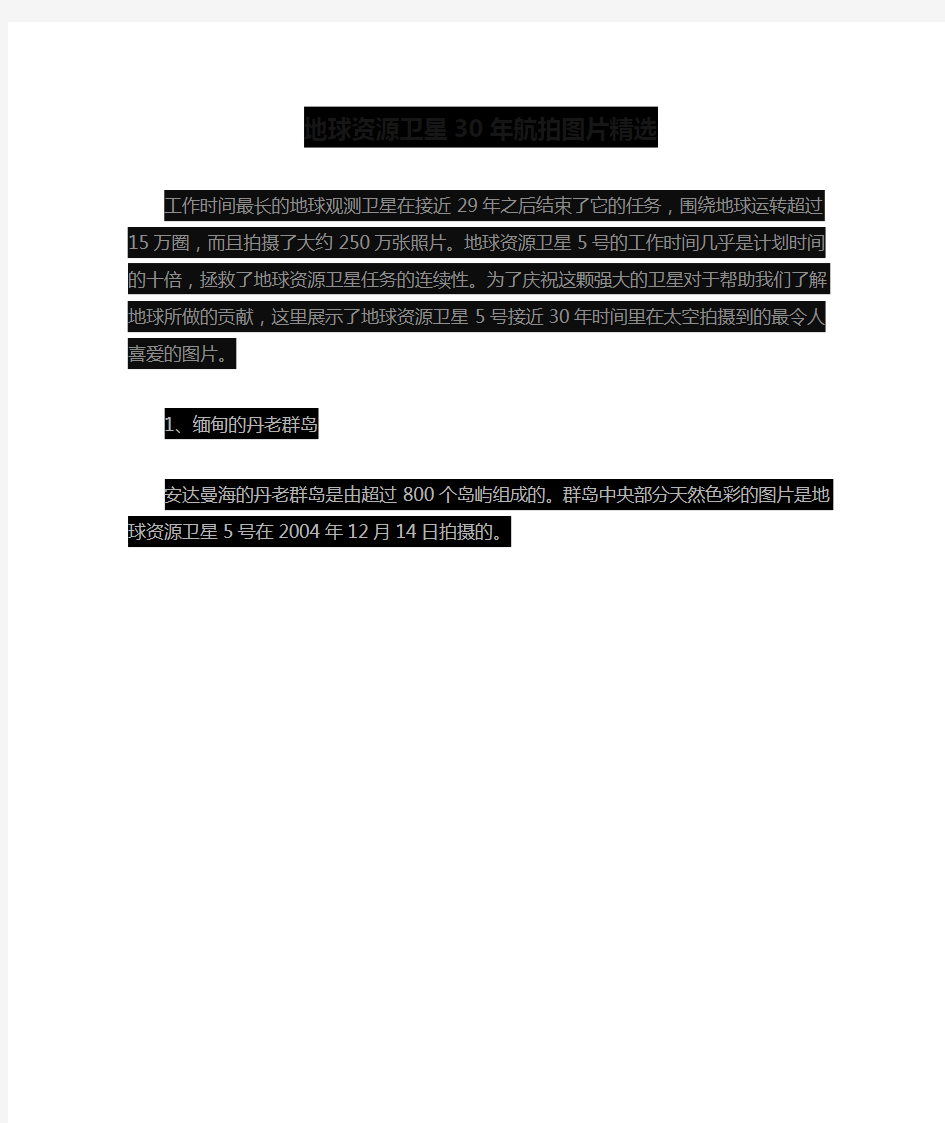
1、缅甸的丹老群岛
安达曼海的丹老群岛是由超过800个岛屿组成的。群岛中央部分天然色彩的图片是地球资源卫星5号在2004
年12月14日拍摄的。
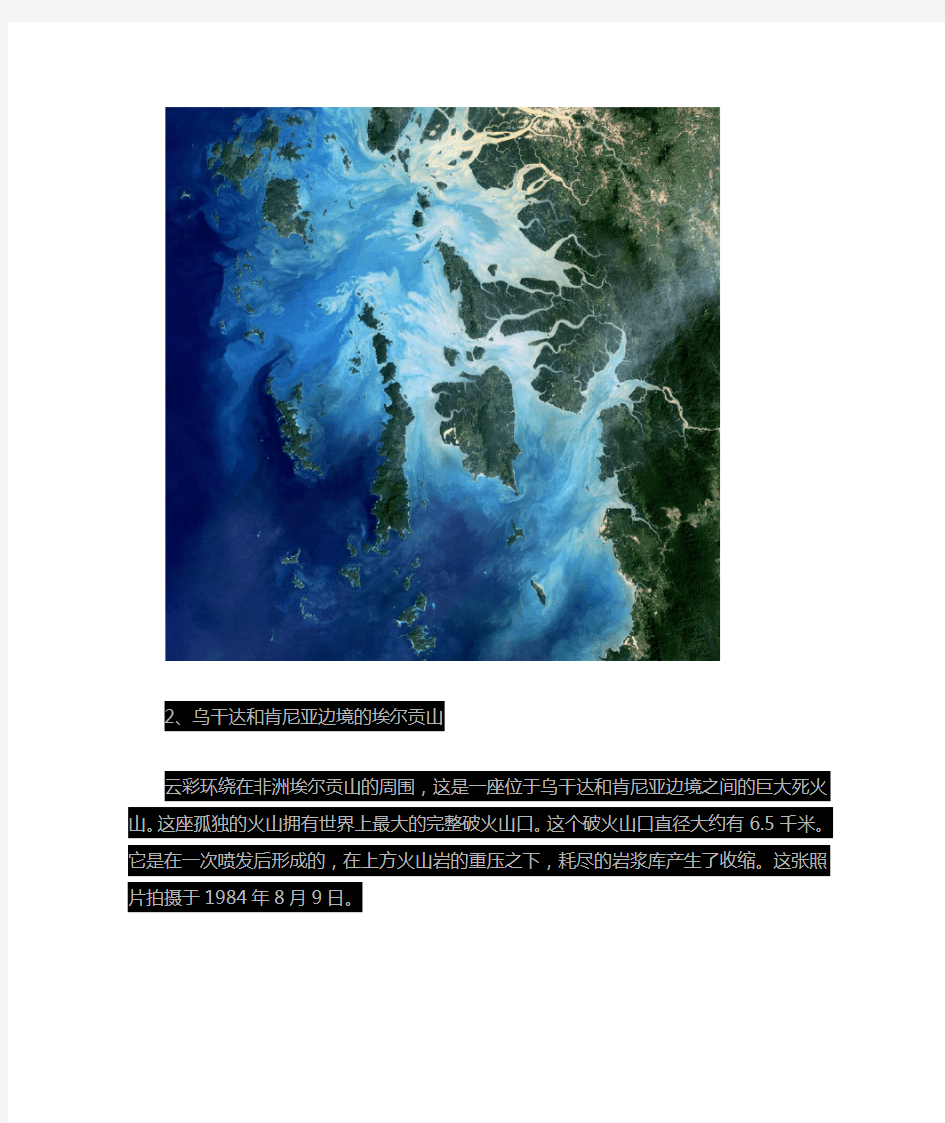
2、乌干达和肯尼亚边境的埃尔贡山
云彩环绕在非洲埃尔贡山的周围,这是一座位于乌干达和肯尼亚边境之间的巨大死火山。这座孤独的火山拥有世界上最大的完整破火山口。这个破火山口直径大约有6.5千米。它是在一次喷发后形成的,在上方火山岩的重压之下,耗尽的岩浆库产生了收缩。这张照片拍摄于1984年8月9日。
3、加拿大的贝尔彻群岛
贝尔彻群岛就像是粉色和绿色画笔一笔一笔画出来的一样,它蔓延着穿过深蓝色的加拿大哈德逊湾。群岛上唯一的居民都生活在小镇萨尼基洛克。尽管这张图片展现出绿色的色调,但是这些岩石岛屿太寒冷,只能维持少数生长缓慢的植被。这张照片拍摄于2001年9月21日。
4、内华达的拉斯维加斯
地球资源卫星5号令人难忘的长寿让我们深入了解到地球表面随着时间发生的变化。在这些照片中能够清楚的看到拉斯维加斯在1984年和2009年的惊人发展。照片分别拍摄于1984年10月22日(左)和2009年1月12日(右)。
5、伊利湖
尽管伊利湖在这张照片中看起来很美丽,但是水中的绿色漩涡是最糟糕的有毒海藻在湖中生长了数十年的证据。这张照片拍摄于2011年10月5日。
6、沃巴什河和俄亥俄河
这两张照片展示了靠近印第安纳州埃尔斯维尔的沃巴什河和俄亥俄河爆发洪水(上图,2011年5月3日)以及洪水退去的景象(下图,2011年6月4日)。地球资源卫星5号使用它的专题成像仪拍摄到这些自然色的照片。
7、亚利桑那州的佩恩蒂德沙漠
地球资源卫星5号的主题成像仪不仅能够拍摄自然色的照片,而且能够以我们无法观察到的光谱拍摄照片,比如说这张照片。不同类型的岩石、植物和土壤在这些光谱带能够更好的观察到,结果就会拍摄到一张色彩丰富的美丽照片。这张照片拍摄于2009年的3月28日。
8、阿曼的佐法尔地区
阿曼的大部分领土都是沙漠,但是佐法尔地区的阿拉伯海岸代表了气候上的一种令人吃惊的差别。这一海滨地区能在夏季月份捕获季风雨。雨水首先降落在山脊,分别灌溉着海岸的富饶土地。这张照片拍摄于2005年的4月2日。
9、阿尔及利亚的伊圭迪沙漠
照片中看起来像穿过斑驳色彩图案的淡黄色油漆条纹是形成伊圭迪沙漠的风吹沙纹。非洲西南部的这片沙漠区域的流沙沙丘从阿尔及利亚一直延伸到了毛里塔尼亚。这张照片拍摄于1985年4月8日。
10、希腊的罗斯岛
这张照片是爱琴海中的长达48英里的希腊罗斯岛,照片拍摄于2011年8月26日。罗斯岛是多德柯尼斯群岛群岛中最长的岛屿。
11、马萨诸塞州的龙卷风轨迹
这张照片拍摄于2011年6月,展现了穿过马萨诸塞州西南部的龙卷风轨迹。
12、新英格兰
2011年飓风艾琳袭击袭击新英格兰一个周后的9月2日,地球资源卫星5号拍摄了这张康乃狄克河倾泻进长岛海峡的自然色照片
13、澳大利亚的艾尔湖
澳大利亚的艾尔湖通常都是干旱的,但是陆地资源卫星5号在2009年的一个异常雨季拍摄到了这张照片。
14、博茨瓦纳的奥卡万戈河
非洲南部的奥卡万戈河穿过博茨瓦纳荒凉干燥的北部风景,成为了茂盛的奥卡万戈三角洲。三角洲是在河流注入到喀拉哈里沙漠一个盆地时形成的,创造出一个迷宫式的泻湖、水渠和岛屿。这张照片拍摄于2009年的4月27日。
遥感影像的比例尺和分辨率的关系
遥感影像的比例尺和分辨率的关系 航空摄影测量对影像的要求 航空摄影测量的实践可以用来借鉴分析卫星影像与成图比例尺的选择。这是因为二者的成图原理相似,并且航空摄影测量具有大量的实践经验和实验数据,是非常成熟的。 航空摄影测量中没有直接给出对影像分辨率的要求,但可以通过对摄影仪物镜分辨率的要求和摄影比例尺来推断。航摄中航摄仪镜头分辨率表示通过航空摄影后在影像上能够分辨的线条的最小宽度(这里没有考虑软片和像纸的分辨率)。在航摄规范(GB/T 15661-1995)中规定航摄仪有效使用面积内镜头分辨率“每毫米内不少于25 线对”。根据物镜分辨率和摄影比例尺可以估算出航摄影像上相应的地面分辨率D,即D=M/R。(其中M 为摄影比例尺分母,R 为镜头分辨率。)根据航摄规范中“航摄比例尺的选择”的规定和以上公式,可得表(1) 成图比例尺航摄比例尺影像地面分辨率(m) 1:5000 1:10 000~1:20 000 0.4~0.8 1:10 000 1:20 000~1:40 000 0.8~1.6 1:2 5000 1:25 000~1:60 000 1.0~2.4 1:50 000 1:35 000~1:80 000 1.4~3.2 上表可以作为选择卫星影像分辨率的参考。顺便指出,从表中可以看出,虽然成图比例尺愈大,所需的影像分辨率愈高,但两者并不是成线性正比关系,而是非线性的。 2 卫星影像分辨率的选择 卫星影像分辨率的选择除了考虑不同比例尺成图对影像分辨率要求,还要考虑现有可获取的卫星影像产品之规格,因为卫星摄影与航空摄影不同,其摄影高度(即摄影比例尺)是固定的。 下面列出几种商用卫星影像的分辨率。表(2) 卫星QuickBird-2 IKONOS-2 SPOT-5 SPOT-4 Landsat-7 最高分辩率(m) 0.61 1 2.5 10 15 对照表(1)和表(2),个人认为就目前较为稳定的卫星影像货源来讲,对于1:5000~1:50 000 的基础测绘更新试验,可以考虑如下的分辨率选择。表(3)成图比例尺卫星影像(分辨率) 1:5000~1:10 000 QuickBird(0.61m) IKONOS-2 (1m) 1:25 000 QuickBird-2(0.61m) IKONOS-2 (1m) SPOT-5(2.5m) 1:50 000 SPOT-5(2.5m) 对于已有旧版实测地形图的地区,若有足够密度的图上参考点(即可与卫片上的同位置点相一致)作范围控制的基础上,在地形图局部快速更新(修、补测)时,可以考虑适当放宽对分辨率的要求,如用2.5m 分辨率卫片局部修、补测1:10 000 地形图,用10m 分辨率卫片局部修、补测1:50 000 地形图等。
目前世界资源卫星发展现状
目前世界资源卫星发展现状
遥感基础与应用 目前世界资源卫星发展概况 学院:资源学院 班级:土测2013-3 姓名:陈坤 学号:20135760 指导教师:胡玉福
自人类进入太空时代以来,卫星遥感成为我们观察、分析、描述地球环境的行之有效的手段。其中,地球资源卫星由于应用领域最为广泛,应用需求最为紧迫,自1972年美国发射第一颗地球资源卫星以来,世界地球资源卫星发展迅速。1995年,印度、加拿大和以色列等国先后发射了此类卫星,1999年和2000 年美国和以色列又陆续发射了小型的地球资源卫星,使得地球资源卫星在各国航天发展中扮演着越来越重要的角色。 一中国资源卫星发展概况 中国资源卫星发展起步晚,但发展快,技术日益成熟,已达到国际先进水平,目前我国遥感卫星已进入亚米级“高分时代”。 1.中巴资源卫星系列(CBERS) 中巴地球资源卫星是1988年中国和巴西两国政府联合议定书批准,由中、巴两国共同投资,联合研制的卫星(代号CBERS o 1999年10月14日,中巴地球资源卫星01星(CBERS-01成功发射,在轨运行3年10个月;02星(CBERS-02 于2003年10 月21日发射升空,目前仍在轨运行。是中国空间事业对外合作的一个窗口。通过这个窗口,可以引进、吸收国外先进技术及管理方面的经验,提高我国卫星研制水平,进一步推动我国在航天领域与国际上的交流与合作。 2.资源三号卫星 资源三号卫星于2012年1月9日成功发射。资源三号卫星重约2650公斤,设计寿命约5年。资源三号卫星是我国首颗民用高分辨率光学传输型立体测图卫星,卫星集测绘和资源调查功能于一体。资源三号上搭载的前、后、正视相机可以获取同一地区三个不同观测角度立体像对,能够提供丰富的三维几何信息,填补了我国立体测图这一领域的空白,具有里程碑意义。 3.高分系列卫星 “高分一号”于2013年4月26日在酒泉卫星发射中心由长征二号丁运载 火箭成功发射。是高分辨率对地观测系统国家科技重大专项的首发星,配置了2 台2米分辨率全色/8米分辨率多光谱相机,4台16米分辨率多光谱宽幅相机。高分一号卫星突破了高空间分辨率、多光谱与高时间分辨率结合的光学遥感技术,多载荷图像拼接融合技术,高精度高稳定度姿态控制技术,5年至8年寿命 高可靠卫星技术,高分辨率数据处理与应用等关键技术,对于推动我国卫星工程水平的提升,提高我国高分辨率数据自给率,具有重大战略意义。 高分二号卫星是我国自主研制的首颗空间分辨优于1米的民用光学遥感卫 星,搭载有两台高分辨率1米全色、4米多光谱相机,具有亚米级空间分辨率、高定位精度和快速姿态机动能力等特点,有效地提升了卫星综合观测效能,达到了国际先进水平。高分二号卫星于8月19日成功发射,8月21日首次开机成像并下传数据。这是我国目前分辨率最高的民用陆地观测卫星,星下点空间分辨率可达0.8米,标志着我国遥感卫星进入了亚米级“高分时代”。主要用户为国土资源部、住房和城乡建设部、交通运输部和国家林业局等部门,同时还将为其他用户部门和有关区域提供示范应用服务。
ALOS卫星和ALOS-2卫星影像对比
到2010年时,ALOS卫星已经服役了4年(ALOS卫星于2006
强。
实时的GPS L1导航: 在监测灾害方面,实时导航在使用L1信号时很重要 通过算法提升导航精度(预估电离层时延及其变化) 测量精度优于10m 事后精密定轨: 双频(L1和L2波段)事后定轨精度优于1m ALOS-2卫星的SAR载荷发射波段与L2信号有重叠部分 提升GPS接收机低噪声放大器,抵抗SAR信号干扰的技术已经具备。 敏捷姿态能力:ALOS-2卫星具有绕本体滚动轴左右侧摆±30o的能力,该能力是为了减少卫星重访周期。卫星从左侧视到右侧视的状态改变只需最多3 分钟。 为了获得最大的姿态机动角速度,即在滚动轴方向角速度为0.7o/s,其中一个动量轮专门设置在滚动轴方向上。该动量轮由JAXA的导航与控制研究所研
制,最大输出控制力矩为0.9Nm,最大输出角动量为40Nms。 图2:ALOS-2卫星的左右测试机动能力示意图 无线通信:任务要求卫星具有800Mbit/s的X波段载荷数据下传能力,而在传统的QPSK调制模式下,在375MHz频点下,峰值传输能力只能到400 Mbit/s,为了解决传输能力不足的问题,JAXA研发了XMOD(多模式高速数传模块)技术,使得数传系统能力提升到800Mbit/s,满足了卫星任务需求。 ALOS-2卫星装备了改进的数据管理系统,其中包括高速且巨大容量的数据存储装置,MDHS(任务数据处理系统)具有两种高速传输方式:直接传输和2次传输方式,MDHS的数据容量可达130GB,用于容纳PALSAR-2载荷收集
得来的数据,并收集其他系统的健康数据。 图3:ALOS-2卫星数传系统逻辑架构 发射情况: ALOS-2卫星于2014年5月24日,由日本研制的H-IIA F24型运载火箭从种子岛余杭中心发射升空,从火箭点火开始计时,15分钟47秒后ALOS-2卫星与运载火箭上面级分离确认。
陆地资源卫星
资源卫星简介(Resources satellite) 用于勘测和研究地球自然资源的卫星。它能“看透”地层,发现人们肉眼看不到的地下宝藏、历史古迹、地层结构,能普查农作物、森林、海洋、空气等资源,预报各种严重的自然灾害。 资源卫星利用星上装载的多光谱遥感设备,获取地面物体辐射或反射的多种波段电磁波信息,然后把这些信息发送给地面站。由于每种物体在不同光谱频段下的反射不一样,地面站接收到卫星信号后,便根据所掌握的各类物质的波谱特性,对这些信息进行处理、判读,从而得到各类资源的特征、分布和状态等详细资料,人们就可以免去四处奔波,实地勘测的辛苦了。 资源卫星分为两类:一是陆地资源卫星,二是海洋资源卫星。陆地资源卫星以陆地勘测为主,而海洋资源卫星主要是寻找海洋资源。 资源卫星一般采用太阳同步轨道运行,这能使卫星的轨道面每天顺地球自转方向转动1度,与地球绕太阳公转每天约1度的距离基本相等。这样既可以使卫星对地球的任何地点都能观测,又能使卫星在每天的同一时刻飞临某个地区,实现定时勘测。 信息传输地球资源卫星获取的遥感图像数据信息量较大,卫星上需要有专门的宽频带、高速率数据传输设备。因此常选用S和X波段,甚至Ku波段作为输出频率。卫星并不总是处在地面台站接收范围内,因此地球资源卫星上都带有数据存贮设备,待卫星飞越接收站上空时再将数据发回。“陆地卫星” 4号能通过数据中继卫星将所得数据实时传送到地面台站。 世界上第一颗陆地资源卫星是美国1972年7月23日发射的,名为“陆地卫星1号”。它采用近圆形太阳同步轨道,距地球920公里高,每天绕地球14圈。星上的摄像设备不断地拍下地球表面的情况,每幅图象可覆盖地面近两万平方公里,是航空摄影的140倍。 资源卫星示例 法国的史波特卫星(SPOT) 1986年2 月法国成功的发射第一颗SPOT 卫星(SPOT-1),1990 年1月再发射第二颗SPOT-2 。1993 年8 月SPOT-1 停止使用,9月底再次成功的发射SPOT-3 卫星,但不幸于1996 年11 月失去联络,随后SPOT-1 重新启用。 SPOT 系列卫星为太阳同步卫星,平均航高832 公里,轨道与赤道倾斜角98.77 °,绕地球一圈周期约101.4 分,一天可转14.2 圈,每26 天通过同一地区,SPOT 卫星一天内所绕行的轨道,在赤道相邻两轨道最大距离2823。6 公里,全球共有369 个轨道。SPOT-1-3 卫星上有两组HRV(High Resolution Visible) 感测器,每一组感测器分别拥有多光谱态(XS) 及全色态(PAN) 两种模式。多光谱之三个波段分别为绿光段(XS1 :0.5 m m –0.59 m m) ,红光段(XS2 :0.61 m m – 0.68 m m) 与近红外光段(XS3 :0.79 m m – 0.89 m m) ,而全色态的波长范围则在0.50 m m –0.73 m m 。每一组HRV 之每一波段皆有6000 个CCD 。其中全色态每一个CCD 对应一个像元,多光谱态每一像元由两个CCD 之资料相加平均而组成。每一组HRV 之视野角(Field of View) 为4.25 度。 SPOT-4 号卫星
视频采集系统
数字图象处理技术在电子通信与信息处理领域得到了广泛的应用,设计一种功能灵活、使用方便、便于嵌入到监控系统中的视频信号采集电路具有重要的实用意义。 在研究基于DSP的视频监控系统时,考虑到高速实时处理及实用化两方面的具体要求,需要开发一种具有高速、高集成度等特点的视频图象信号采集监控系统,为此监控系统采用专用视频解码芯片和复杂可编程逻辑器件(CPLD)构成前端图象采集部分。设计上采用专用视频解码芯片,以CPLD器件作为控制单元和外围接口,以FIFO为缓存结构,能够有效地实现视频信号的采集与读取的高速并行,具有整体电路简单、可靠性高、集成度高、接口方便等优点,无需更改硬件电路,就可以应用于各种视频信号处理监控系统中。使得原来非常复杂的电路设计得到了极大的简化,并且使原来纯硬件的设计,变成软件和硬件的混合设计,使整个监控系统的设计增加柔韧性。 1 监控系统硬件平台结构 监控系统平台硬件结构如图1所示。整个监控系统分为两部分,分别是图象采集监控系统和基于DSP主监控系统。前者是一个基于SAA7110A/SAA7110视频解码芯片,由复杂可编程逻辑芯片CPLD实现精确采样的高速视频采集监控系统;后者是通用数字信号处理监控系统,它主要包括:64K WORD程序存储器、64K WORD数据存储器、DSP、时钟产生电路、串行接口及相应的电平转换电路等。 监控系统的工作流程是,首先由图象采集监控系统按QCIF格式精确采集指定区域的视频图象数据,暂存于帧存储器FIFO中;由DSP将暂存于FIFO中的数据读入DSP的数据存储器中,与原先的几帧图象数据一起进行基于H.263的视频数据压缩;然后由DSP将压缩后的视频数据平滑地从串行接口输出,由普通MODEM或ADSL MODEM传送到远端的监控中心,监控中心的PC机收到数据后进行相应的解码,并将还原后的视频图象进行显示或进行基于WEB的广播。 2 视频信号采集监控系统 2.1 视频信号采集监控系统的基本特性 一般的视频信号采集监控系统一般由视频信号经箝位放大、同步信号分离、亮度/色度信号分离和A/D变换等部分组成,采样数据按照一定的时序和总线要求,输出到数据总线上,从而完成视频信号的解码,图中的存储器作为帧采样缓冲存储器,可以适应不同总线、输出格式和时序要求的总线接口。 视频信号采集监控系统是高速数据采集监控系统的一个特例。过去的视频信号采集监控系统采用小规模数字和模拟器件,来实现高速运算放大、同步信号分离、亮度/色度信号分离、高速A/D变换、锁相环、时序逻辑控制等电路的功能。但由于监控系统的采样频率和工作时钟高达数十兆赫兹,且器件集成度低,布线复杂,级间和器件间耦合干扰大,因此开发和调试都十分困难;另一方面,为达到精确采样的目的,采样时钟需要和输人的视频信号构成同步关系,因而,利用分离出来的同步信号和监控系统采样时钟进行锁相,产生精确同步的采样时钟,成为设计和调试过程中的另一个难点。同时,通过实现亮度、色度、对比度、视频前级放大增益的可编程控制,达到视频信号采集的智能化,又是以往监控系统难以完成的。关于这一点,在监控系统初期开发过程中已有深切体会[1]。 基于以上考虑,本监控系统采用了SAA7110A作为视频监控系统的输入前端视频采样处理器。 2.2 视频图象采集监控系统设计 SAA7110/SAA7110A是高集成度、功能完善的大规模视频解码集成电路[2]。它采用PLCC68封装,内部集成了视频信号采样所需的2个8bit模/数转换器,时钟产生电路和亮度、对比度、饱和度控制等外围电路,用它来替代原来的分立电路,极大地减小监控系统设计的工作量,并通过内置的大量功能电路和控制寄存器来实现功能的灵活配置。
LabVIEW应用于实时图像采集及处理系统
LabVIEW应用于实时图像采集及处理系统 2008-7-29 9:35:00于子江娄洪伟于晓闫丰隋永新杨怀江供稿 摘要:本文在LabVIEW和NI-IMAQ Vision软件平台下,利用通用图像采集卡开发一种图像实时采集处理虚拟仪器系统。通过调用动态链接库驱动通用图像采集卡完成图像采集,采集图像的帧速率达到25帧每秒。利用NI-IMAQ Vision视频处理模块,进行图像处理,以完成光电探测器的标定。该系统具有灵活性强、可靠性高、性价比高等优点。 主题词:虚拟仪器;图像处理;LabVIEW;动态链接库 1.引言 美国国家仪器(NI)公司的虚拟仪器开发平台LabVIEW,使用图形化编程语言编程,界面友好,简单易学,配套的图像处理软件包能提供丰富的图像处理与分析算法函数,极大地方便了用户,使构建图像处理与分析系统容易、灵活、程序移植性好,大大缩短了系统开发周期。在推出应用软件的基础上,NI公司又推出了图像采集卡,对于NI公司的图像采集卡,可以直接使用采集卡自带的驱动以及LabVIEW中的DAQ库直接对端口进行操作。 但由于NI公司的图像采集卡成本很高,大多用户难以接受,因此硬件平台往往采用通用图像采集卡,软件方面的图像处理程序仍采用LabVIEW以及视频处理模块编写。本文正是基于这样的目的,提出了一种在LabVIEW环境下驱动通用图像采集卡的方案,在TDS642EVM高速DSP视频处理板卡的平台下,完成实时图像采集及处理。 在图象处理的工作中主要完成对CCD光电探测器的辐射标定。由于探测器在自然环境下获取图像时,会受到来自大气干扰,自身暗电流,热噪声等影响,使CCD像元所输出信号的数值量化值与实际探测目标辐射亮度之间存在差异,所以要得到目标的精确图像就必须对探测器进行辐射标定。 2.图像采集卡简介 闻亭公司TDS642EVM(简称642)多路实时视频处理板卡是基于DSP TMS320DM642芯片设计的评估开发板。计算能力可达到4Gips,板上的视频接口和视频编解码芯片Philips SAA7115H相连,实现实时多路视频图像采集功能,支持多种PAL,NTSC和SECAM视频标准。本系统通过642的PCI接口与主机进行数据交换。PCI支持“即插即用(PnP)”自动配置功能,使图像采集板的配置变得更加方便,其一切资源需求的设置工作在系统初启时交由BIOS处理,无需用户进行繁琐的开关与跳线操作。PCI接口的海量数据吞吐,为其完成实时图像采集和处理提供保证。 3.系统组成及工作原理
详细解析无人机航拍航测
无人机航拍航测及其广泛应用 无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器。无人机结构简单、使用成本低,不但能完成有人驾驶飞机执行的任务,更适用于有人飞机不宜执行的任务。在突发事情应急、预警有很大的作用。(以下内容有红点航拍手机整理,红点航拍年成立,年规模化运营,服务于华东地区,拥有丰富航拍经验和强大的航拍设备)无人机航拍航测遥感简介 无人机航拍是以无人驾驶飞机作为空中平台,以机载遥感设备,如高分辨率数码相机、轻型光学相机、红外扫描仪,激光扫描仪、磁测仪等获取信息,用计算机对图像信息进行处理,并按照一定精度要求制作成图像。全系统在设计和最优化组合方面具有突出的特点,是集成了高空拍摄、遥控、遥测技术、视频影像微波传输和计算机影像信息处理的新型应用技术。 为适应城镇发展的总体需求,提供综合地理、资源信息。正确、完整的信息资料是科学决策的基础。各地区、各部门在综合规划、田野考古、国土整治监控、农田水利建设、基础设施建设、厂矿建设、居民小区建设、环保和生态建设等方面,无不需要最新、最完整的地形地
物资料,已成为各级政府部门和新建开发区急待解决的问题。我们用遥感航拍技术准确地反映出地区新发现的古迹、新建的街道、大桥、机场、车站以及土地、资源利用情况的综合信息。遥感航拍技术是各种先进手段优化组合的新型应用技术。 无人机航拍技术以低速无人驾驶飞机为空中遥感平台,用彩色、黑白、红外、摄像技术拍摄空中影像数据;并用计算机对图像信息加工处理。全系统在设计和最优化组合方面具有突出的特点,是集成了遥感、遥控、遥测技术与计算机技术的新型应用技术。 无人机航拍的特点 无人机航拍影像具有高清晰、大比例尺、小面积、高现势性的优点。特别适合获取带状地区航拍影像(公路、铁路、河流、水库、海岸线等)。且无人驾驶飞机为航拍摄影提供了操作方便,易于转场的遥感平台。起飞降落受场地限制较小,在操场、公路或其它较开阔的地面均可起降,其稳定性、安全性好,转场等非常容易。 小型轻便、低噪节能、高效机动、影像清晰、轻型化、小型化、智能化更是无人机航拍的突出特点。
资源CBERS卫星介绍
资源01、02卫星介绍 中巴地球资源卫星是1988年中国和巴西两国政府联合议定书批准,由中、巴两国共同投资,联合研制的卫星(代号CBERS)。1999年10月14日,中巴地球资源卫星01星(CBERS-01)成功发射,在轨运行3年10个月;02星(CBERS-02)于2003年10月21日发射升空,目前仍在轨运行。 CBERS-1/02星特性 。。。。。轨道:太阳同步回归冻结轨道 。。。。。平均高度:778公里 。。。。。降交点地方时:10:30 。。。。。回归周期:26天 。。。。。平均节点周期:100.26 分钟 。。。。。每日圈数:14+9/26 。。。。。相邻轨道间距离:107.4公里 。。。。。相邻轨道间隔时间:3天 CBERS-1/02星有效载荷 · 三种传感器: 。。。。。☆电荷耦合器件摄像机(CCD) 。。。。。☆红外多光谱扫描仪(IRMSS) 。。。。。☆宽视场相机(WFI) 。。。。。高密度数字磁记录仪(HDDR) 。。。。。数据采集系统(DCS) 。。。。。空间环境监测系统(SEM) 。。。。。数据传输系统(DTS) CCD相机(CCD) CCD相机在星下点的空间分辨率为19.5米,扫描幅宽为113公里。它在可见、近红外光谱范围内有4个波段和1个全色波段。具有侧视功能,侧视范围为±32°。相机带有内定标系统。 红外多光谱扫描仪(IRMSS) 。。红外多光谱扫描仪(IRMSS)有1个全色波段、2个短波红外波段和1个热红外波段,扫描幅宽为119.5公里。可见光、短波红外波段的空间分辨率为78米,热红外波段的空间分辨率为156米。IRMSS带有内定标系统和太阳定标系统。 宽视场成像仪(WFI)
最新卫星航拍影像地面分辨率的感性认识
卫星航拍影像地面分辨率的感性认识
卫星/航拍影像地面分辨率的感性认识2005年09月20日作者:上帝之眼来源:其它浏览 8592 次 简介:...那么,如果要从照片上看清报纸“南方周末”这四个字,地面分辨率必须达到三毫米左右,比现在侦查卫星的水平要提高一百倍。因此,某些说法提到现在通过卫星拍摄的能看清报纸上的文字、士兵脸上的胡子等说法是没科学根据的,是不负责任甚至耸人听闻的言论。 卫星与航拍影像由像素点组成,像素点越丰富,照相辨认的细节的尺寸越小。影像照片上像素点的密度常用每毫米多少条线来表示,线越多表示影像质量越高。例如,卫星影像每平方毫米的纵横线数各250条,也就是每平方毫米内排列:62500个像素点,其相邻两像素点间的距离只有4微米,这样微小的间隔,即使放大10倍,肉眼也是看不出来的。照片上4微米相当于地面距离多少呢?这与照相机的焦距和卫星的飞行高度有关。如果焦距为2米,飞行高度150公里,那末,根据简单的几何学关系就可求得地面距离为0.3米。这个长度就叫做照片的地面分辨率。通俗地说,地面分辨率是能够在照片上区分两个目标的最小间距,但它并不代表能从照片上识别地面物体的最小尺寸。1尺寸为0.3米的目标,在地面分辨率为0.3的照片上,只是1个像素点,不管把照片放大多少倍,依然只是1个像素点。所以,要从照片上认出一个目标就多少得有若干个像素点在照片上来构成该目标的轮廓。 通常,从照片上能够识别目标的最小尺寸应等于地面分辨率的5~10倍,即1.5至3米。人的肩宽约0.5米,在地面分辨率为0.3米的卫星影像上占1~2个像素点。从照片上可以发现这儿有目标,但这个目标是人,还是物,靠
常见的资源卫星影像数据区别
一.遥感数据基础知识: 太阳辐射经过大气层到达地面,一部分与地面发生作用后反射,再次经过大气层,到达传感器。传感器将这部分能量记录下来,传回地面,即为遥感数据。目前用于遥感的电磁波段有紫外线、可见光、红外线和微波。航空与航天飞行器运行快、周期短,可获得多时相数据。以美国陆地卫星5号(Landsat 5 )为例,Landsat 5每天环绕地球14.5圈,覆盖地球一遍所需时间仅16天,而气象卫星的周期更短(1天或半天)。由于探测距离远,传感器所获得的地面影像覆盖的空间范围较大。它距离地表的高度是705.3 km,对地球表面的扫描宽度是185 km,一幅TM 图像可以全部覆盖我国海南岛大小的面积。不同的卫星传感器获得的同一地区的数据以及同一传感器在不同时间获得的同一地区的数据,均具有可比性. (1)遥感平台 遥感平台是装载传感器的运载工具,按高度分为: 地面平台:为航空和航天遥感作校准和辅助工作。 航空平台:80 km以下的平台,包括飞机和气球。 航天平台:80 km以上的平台,包括高空探测火箭、人造地球卫星、宇宙飞船、航天飞机。 人造地球卫星的类型: 低高度、短寿命卫星:150~350 km,用于军事。 中高度、长寿命卫星:350~1800 km,地球资源。 高高度、长寿命卫星:约3600 km,通信和气象。 (2)遥感数据类型 按平台分 地面遥感、航空遥感、航天遥感数据。 按电磁波段分 可见光遥感、红外遥感、微波遥感、紫外遥感数据等。 按传感器的工作方式分 主动遥感、被动遥感数据。 (3)遥感数据获取原理; (4)传感器
a.传感器定义:传感器是收集、探测、记录地物电磁波辐射信息的工具。它的性能决定遥感的能力,即传感器对电磁波段的响应能力、传感器的空间分辨率及图像的几何特征、传感器获取地物信息量的大小和可靠程度。 b.传感器的分类 按工作方式分为: 主动方式传感器:侧视雷达、激光雷达、微波辐射计。 被动方式传感器:航空摄影机、多光谱扫描仪(MSS)、TM、ETM(1,2)、HRV、红外扫描仪等。 c.传感器的组成 收集器:收集来自地物目标镜、天线。 探测器:将收集的辐射能转变成化学能或电能。 处理器:将探测后的化学能或电能等信号进行处理。 输出:将获取的数据输出。 传感器一般由信息收集、探测系统、信息处理和信息输出4部分组成。 d.传感器的工作原理 是收集、量测和记录来自地面目标地物的电磁波信息的仪器,是遥感技术的核心部分。 根据传感器的工作方式分为:主动式和被动式两种。 主动式:人工辐射源向目标物发射辐射能量,然后接收目标物反射回来的能量,如雷达。 被动式:接收地物反射的太阳辐射或地物本身的热辐射能量,如摄影机、多光谱扫描仪(MSS、TM、ETM、HRV)。 (5)遥感应用的电磁波波谱段 紫外线:波长范围为0.01~0.38μm,太阳光谱中,只有0.3~0.38μm波长的光到达地面,对油污染敏感,但探测高度在2000 m以下。 可见光:波长范围:0.38~0.76μm,人眼对可见光有敏锐的感觉,是遥感技术应用中的重要波段。 红外线:波长范围为0.76~1000μm,根据性质分为近红外、中红外、远红外和超远红外。 微波:波长范围为1 mm~1 m,穿透性好,不受云雾的影响。
基于arm的视频图像采集系统
基于arm的视频图像采集系统 摘要:本系统采用了Samsung公司生产的S3C2440芯片作为嵌入式处理器,再结合系统所需的外围硬件构成基本硬件电路。主要包括二大部分:处理器和存储器部分;电源时钟复位电路部分;外围接口电路部分。在对各部分硬件进行详细设计后,接下来详细介绍了嵌入式软件平台的构建,包括如何移植Linux操作系统:基于嵌入式Linux下USB接口摄像头视频设备采集;移植H.264视频压缩库和视频传输程序的编写。 1 抓拍系统开发环境的构建 本文所设计的采集系统按功能可划分为嵌入式主控模块、视频采集模块、网络传输模块、等三大部分。图1-1为本系统的系统框架图: 1. USB数字摄像头采集图像数据: 2.采集传输应用程序通过摄像头驱动从摄像头获取到采集的图像数据: 3.采集传输应用程序调用H.264编码库对图像数据进行压缩: 4.采集传输应用程序将压缩后的图像数据通过网络传输给windows PC上 的显示程序: 5. Windows上的显示程序对图像数据进行解码并显示: 图1-1软件架构图 本系统的嵌入式主控模块是基于Samsung公司生产的S3C2440这款处理器,主要作用是实现对各模块数据的响应、处理以及控制。在硬件上,主控模块包括电源、时钟、复位电路、存储模块、以太网接口电路等。在软件上,主控模块上运行Linux操作系统,管理各应用程序模块进程并调度各进程。
1.1采集系统的硬件平台设计 本系统的核心处理器为二星公司的S3C2440,外扩64M的SDRAM存储器以及64M 的FLASH存储器,外围接口电路模块:包括USB接口电路,以太网网卡DM9000接口电路以及网眼3000的数字摄像头等。本系统的硬件结构如图1-2所示。 图1-2系统硬件架构图 1.1.1电源、时钟模块设计 系统各部分硬件要求提供1.8V和3V的电压。其中S3C2440处理器内核需要提供1.8V 电源,NandFlash, SDRAM及DM9000等芯片需要提供3V电源,所以本系统采用了LM1117-3.3和LM1117-1.8电压转换芯片设计稳压电源,得到1.8V和3.3V的所需电压。USB 控制器需要提供5V的电源。本文采用了5V直流电压供电。LM1117是一个低压差电压调节器系列。其压差在1.2V输出,负载电流为800mA时为1.2V 。LM1117有5个固定电压输出(1.8V, 2.5V, 2.85V, 3.3V和5V)的型号。根据本系统的需要,这里选用了电压输出为1.8V 和3.3V两型号。 时钟电路为CPU和其它外围电路提供精准的工作时钟,按照电路中设计使用的器件特性分为有源和无源晶振,在本系统的设计电路中采用的是无源晶振。ARM芯片均提供时钟发生电路,结合一定的辅助电路的配合就可以得到所需要的时钟信号。基十ARMS的这款S3C2440芯片的时钟控制逻辑可以产生为CPU核供给时钟信号的FCLK、为AHB总线供给时钟信号的HCLK、为APB总线供给时钟信号的PCLK。 1.1.2外部存储器的扩展 S3C2440微处理器存储空间仅有32M,应用于本系统,需要外扩存储器。本设计采用两片二星公司的HY57V561620来扩展64M的SDRAM。它们均4M* 16bit*4bank的SDRAM 芯片,这样,两片SDRAM实现了位扩展,数据总线达到了32bit,构成64M寻址空间。图1-3为S3C2440与NandFlash的接口图。
PCB图像采集系统研究背景意义及国内外现状
PCB图像采集系统研究背景意义及国内外现状 1 研究背景 2 AOI系统的研究和国内现状 3 研究意义 1 研究背景 印刷电路板(Printed Circuit Board,PCB)又称为印刷线路板或印制电路板。印刷电路板是各种电子产品的主要部件,有“电子产品之母”之称,它是任何电子设备及产品均需配备的,其性能的好坏在很大程度上影响到电子产品的质量。几乎每一种电子设备都离不开PCB,小到电子手表、计算器,大到航空航天、军用武器系统等,都包含各式各样,大小各异的PCB板。近年来,随着生产工艺的不断提高,PCB正在向超薄型、小元件、高密度、细间距方向快速发展。这种趋势必然给质量检测工作带来了很多挑战和困难。因此PCB故障的检测已经成为PCB制造过程中的一个核心问题,是电子产品制造厂商非常关注的问题。在生产线上,厂家为保证PCB板的质量,就得要求100%的合格率,对所有的部件、子过程和成品都是如此。在过去靠人工对其进行检测的过程中,存在以下几个不可避免的缺点: (1)容易漏检。由于是人眼检测,眼睛容易疲劳,会造成故障不能被发现的问题。并且人工检测主观性大,判断标准不统一,使检测质量变得不稳定。 (2)检测速度慢,检测时间长。比如对于图形复杂的印刷电路板,人工很难实现快速高效的检测,因此人工检测不能满足高速的生产效率。 (3)随着技术的发展,设备的成本降低,人工费用增加,仍然由人工进行产品质量控制,将难于实现优质高效,而且还会增加生产成本。 (4)在信息技术如此发达的今天人工检测有不可克服的劣势,例如:对检测结果实时地保存和远距离传输,对原始图像的保存和远距离传输等。 (5)有些在线检测系统是接触式检测,需要与产品进行接触测量,因此,有可能会损伤产品。 因此,人工检测的精确性和可靠性大打折扣,传统意义上的检测方法不再能适应现代电路板检测的要求。如果漏检的有错误的电路板进入下一道工序,随着每一项工艺步骤的增加,到最终经过贴装阶段后,仍然会被检测出来是有故障的,那时,制造厂商与其花费大量的人力和成本来检测、返修这块电路板,还不如选
NASA地球资源卫星的惊人航拍图
NASA地球资源卫星的惊人航拍图 地球资源卫星自1972 年起开始记录地球表面变化,8 号卫星是2013 年2 月11 日发射升空的一颗最新卫星。它以 4.7 英里每秒的速度移动,而且能够在24 小时内完成大约15 次轨道运行。2013 年12 月,地球资源卫星8 号准确找到了地球上最寒冷的地方:南极高原东部的一段山脊,这里的温度能够达到零下133 华氏度(约零下56.1 摄氏度)。这颗卫星上配备的热能探测器,能够记录它经过区域的温度。 去年夏天,这颗卫星拍摄到新墨西哥州蔓延13.8 万英亩的大火。左侧和右侧的照片分别拍摄于2013 年 5 月28 日和2013 年 6 月13 日。借助卫星数据创造的地图能够帮助我们确定遭受最严重破坏的区域。
研究人员能够编辑之前陆地资源卫星的数据,并且创造出这张展现森林空地和森林再生长状况的地图。在过去13 年的时间,大约有88.8 万平方英里的森林被砍伐,但是只有大约30.9 万平方英里的森林得到恢复。 卫星上的热探测器展现了加利福尼亚州沙顿海的热能辐射。照片中的这座内陆海颜色更深,因为它比周围加州沙漠更凉爽。
这是南加州沙顿海的一张真彩色照片,与热成像照片展现了相同的情景
陆地资源卫星在2013 年4 月29 日拍摄到罗卡滕达火山喷发出来的惊人烟羽。
察尔汗湖是中国最大的盐湖,它覆盖面积接近2260 平方英里,但是只是偶尔才会充满水。它被划分成九个较小的盐湖。这张照片拍摄的是9 座盐湖中最大的达布逊湖。 这张俄罗斯舍维留奇火山的照片拍摄于2014 年 1 月24 日。你能够从火山顶部看到火山灰和火山碎屑流。
视频交通流采集系统解决方案
视频交通流信息采集系统解决方案 1概述 视频交通流信息采集系统主要包括视频图像采集设备、视频传输网络、交通流视频检测器等。视频检测器采用虚拟线圈技术,利用边缘信息作为车辆的检测特征,实时自动提取和更新背景边缘,受环境光线变化和阴影的影响较小;同时采用动态窗的方式来进行车辆计数,解决了采用以往固定窗方式进行车辆计数时由于车辆变道而导致的错误、重复计数问题。视频检测器能对视频图像采集设备或交通电视监视系统的视频信号自动进行检测,主要采集道路的微观交通信息如流量、速度、占有率、车辆间距、排队长度等,适用于近景监控模式。 2系统功能及特点介绍 2.1数据接口设计 视频交通流信息采集系统可以通过调用本项目提供的交通流数据统一接入接口,或由本项目提供数据格式标准化及上传程序,将采集到的交通流数据共享给本项目相关系统,以实现视频交通流数据的采集功能。 图1 数据接口设计 2.2系统功能 交通流信息视频检测系统的主要功能如下: (1)车辆检测 系统能够对输入的视频流图像进行车型、车牌等特征检测。
(2)交通流数据采集功能 系统可以采集交通流数据包括交通流量、平均车速、车道占有率、车型、平均车头间距、车辆排队长度、车辆密度、交通流状态等,交通流数据采集时间间隔在1~60分钟任意可调。 图 2 视频交通流检测模块 (3)视频图像跟踪功能 系统能对单路监控前端设备在不同预置位采集的视频图像进行不同区域不同事件的自动检测。一旦检测到特定的交通事件,事件检测器应具有该交通事件的视频图像目标自动跟踪、记录、分析功能。 当输入的视频图像不为设定的预置位的视频图像,系统应能自动不进行事件检测。一旦监控前端设备恢复至设定的预置位,系统应能自动进行事件检测。 (4)事件图像抓拍、录像功能 系统可以根据用户的设置,完成相应的录像和图片抓拍功能。 事件录像可以按摄像机、按事件类型、按时间归档存储在系统的预录像子系统中,由系统服务器进行统一的管理调用。 系统循环进行录像,当发生交通异常事件时,系统能够提供事发之前和之后的3分钟间的录像(可设置)。 系统可通过多种组合查询条件对视频交通流检测所采集的数据进行统计,包括时间-流量统计、时间-平均车速统计、时间-占有率统计、速度-流量统计等;统计结果可导出为
遥感影像比例尺和分辨率的关系
遥感影像比例尺和分辨率的关系
遥感影像的比例尺和分辨率的关系 航空摄影测量对影像的要求 航空摄影测量的实践可以用来借鉴分析卫星影像与成图比例尺的选择。这是因为二者的成图原理相似,并且航空摄影测量具有大量的实践经验和实验数据,是非常成熟的。 航空摄影测量中没有直接给出对影像分辨率的要求,但可以通过对摄影仪物镜分辨率的要求和摄影比例尺来推断。航摄中航摄仪镜头分辨率表示通过航空摄影后在影像上能够分辨的线条的最小宽度(这里没有考虑软片和像纸的分辨率)。在航摄规范(GB/T 15661-1995)中规定航摄仪有效使用面积内镜头分辨率“每毫米内不少于25 线对”。根据物镜分辨率和摄影比例尺可以估算出航摄影像上相应的地面分辨率D,即D=M/R。(其中M 为摄影比例尺分母,R 为镜头分辨率。)根据航摄规范中“航摄比例尺的选择”的规定和以上公式,可得表(1) 成图比例尺航摄比例尺影像地面分辨率(m) 1:5000 1:10 000~1:20 000 0.4~0.8 1:10 000 1:20 000~1:40 000 0.8~1.6 1:2 5000 1:25 000~1:60 000 1.0~2.4 1:50 000 1:35 000~1:80 000 1.4~3.2 上表可以作为选择卫星影像分辨率的参考。顺便指出,从表中可以看出,虽然成图比例尺愈大,所需的影像分辨率愈高,但两者并不是成线性正比关系,而是非线性的。
2 卫星影像分辨率的选择 卫星影像分辨率的选择除了考虑不同比例尺成图对影像分辨率要求,还要考虑现有可获取的卫星影像产品之规格,因为卫星摄影与航空摄影不同,其摄影高度(即摄影比例尺)是固定的。 下面列出几种商用卫星影像的分辨率。表(2) 卫星QuickBird-2 IKONOS-2 SPOT-5 SPOT-4 Landsat-7 最高分辩率(m) 0.61 1 2.5 10 15 对照表(1)和表(2),个人认为就目前较为稳定的卫星影像货源来讲,对于1:5000~1:50 000 的基础测绘更新试验,可以考虑如下的分辨率选择。表(3) 成图比例尺卫星影像(分辨率) 1:5000~1:10 000 QuickBird(0.61m) IKONOS-2 (1m) 1:25 000 QuickBird-2(0.61m) IKONOS-2 (1m) SPOT-5(2.5m) 1:50 000 SPOT-5(2.5m) 对于已有旧版实测地形图的地区,若有足够密度的图上参考点(即可与卫片上的同位置点相一致)作范围控制的基础上,在地形图局部快速更新(修、补测)时,可以考虑适当放宽对分辨率的要求,如用2.5m 分辨率卫片局部修、补测1:10 000 地形图,用10m 分辨率卫片局部修、补测1:50 000 地形图等。 卫星与航拍影像由像素点组成,像素点越丰富,照相辨认的细节的尺寸越小。影像照片上像素点的密度常用每毫米多少条线来表示,线越多表示影像质量越高。例如,卫星影像每平方毫米的纵横线数各250条,也就是每平方毫米内排列:62500个像素点,其相邻两像素点间的距离只有4微米,这样微小的间隔,即使放大10倍,肉眼也是看不出来的。照片上4微米相当于地面距离多少呢?这与照相机的焦距和卫星的飞行高度有关。如果焦距为2米,飞行高度150公里,那末,根据简单的几何学关系就可求得地面距离为0.3米。这个长度就叫做照片的地面分辨率。通俗地说,地面分辨率是能够在照片上区分两个目标的最小间距,但它并不代表能从照片上识别地面物体的最小尺寸。1尺寸为0.3米的目标,在地面分辨率为0.3的照片上,只是1个像素点,不管把照片放大多少倍,依然只
基于Labview的图像采集与处理
目前工作成果: 一、USB图像获取 USB设备在正常工作以前,第一件要做的事就是枚举,所以在USB摄像头进行初始化之前,需要先枚举系统中的USB设备。 (1)基于USB的Snap采集图像 程序运行结果: 此程序只能采集一帧图像,不能连续采集。将采集图像函数放入循环中就可连续采集。
循环中的可以计算循环一次所用的时间,运行发现用Snap采集图像时它的采集速率比较低。运行程序时移动摄像头可以清楚的看到所采集的图像有时比较模糊。 (2)基于USB的Grab采集图像 运行程序之后发现摄像头采集图像的速率明显提高。
二、图像处理 1、图像灰度处理 (1)基本原理 将彩色图像转化成为灰度图像的过程成为图像的灰度化处理。彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的灰度化处理可用两种方法来实现。 第一种方法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。 第二种方法是根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。 (2)labview中图像灰度处理程序框图 处理结果:
图像采集系统设计
DSP实习报告 题目:图像采集系统的设计 班级:xxx 姓名:xxx 学号:xxx 指导老师:xxxx
目录 一.实习题目 (3) 二.实习背景知识 (3) 三.实习内容 (5) 四.实习程序功能与结构说明 (8) 六.实习心得 (19)
一、实习题目 图像采集系统的设计 二、实习目的: 1、熟练掌握数字信号处理的典型设计方法与技术手段; 2、熟悉D6437视频输入,输出端的操作及编程。; 3、掌握常用电子仪器设备的使用方法; 4、熟悉锐化变换算法。 三、实习背景知识 1、计算机 2、CCS3.3.软件 3、DSP仿真器 4、EL_DM6437平台 EL-DM6437EVM是低成本,高度集成的高性能视频信号处理开发平台,可以开发仿真达芬奇系列DSP应用程序,同时也可以将该产品集成到用户的具体应用系统中。方便灵活的接口为用户提供良好的开放平台。采用该系列板卡进行产品开发或系统集成可以大大减少用户的产品开发时间。板卡结构框图如图所示:
板卡硬件资源: TMS320DM6437 DSP ,可工作在400/600 MHz; 2 路视频输入,包括一个复合视频输入及一个S端子视频输入; 保留了视频输入接口,可以方便与CMOS影像传感器连接; 3 路视频输出,包括2路复合视频,一路S端子输出; 128MByte 的DDR2 SDRAM存储器,256MBit的Nor Flash存储器;用户可选的NAND Flash接口; 可选的256K字节的I2C E2PROM; 1个10M/100Mbps自适应以太网接口; 1 路立体声音频输入、1路麦克风输入,1路立体声音频输出; USB2.0高速接口,方便与PC连接; 1个CAN总线、1个UART接口、实时时钟(带256Byte的电池保持RAM);4个DIP开关,4个状态指示LED; 可配置的BOOT模式; 10层板制作工艺,稳定可靠; 标准外部信号扩展接口; JTAG仿真器接口; 单电源+5V供电; 板卡软件资源: