平面连杆机构大作业
大作业(一)
平面连杆机构的运动分析
(题号:5-C)
班级:机制114
学号:2011012789
姓名:陈莎
同组其他人员:许龙飞张海洋
完成日期:2012.10.31
一.题目及原始数据;
二、牛头刨床机构的运动分析方程三.计算程序框图;
四.计算源程序;
五.计算结果;
六.运动线图及运动分析
七.参考书;
一、题目及原始数据;
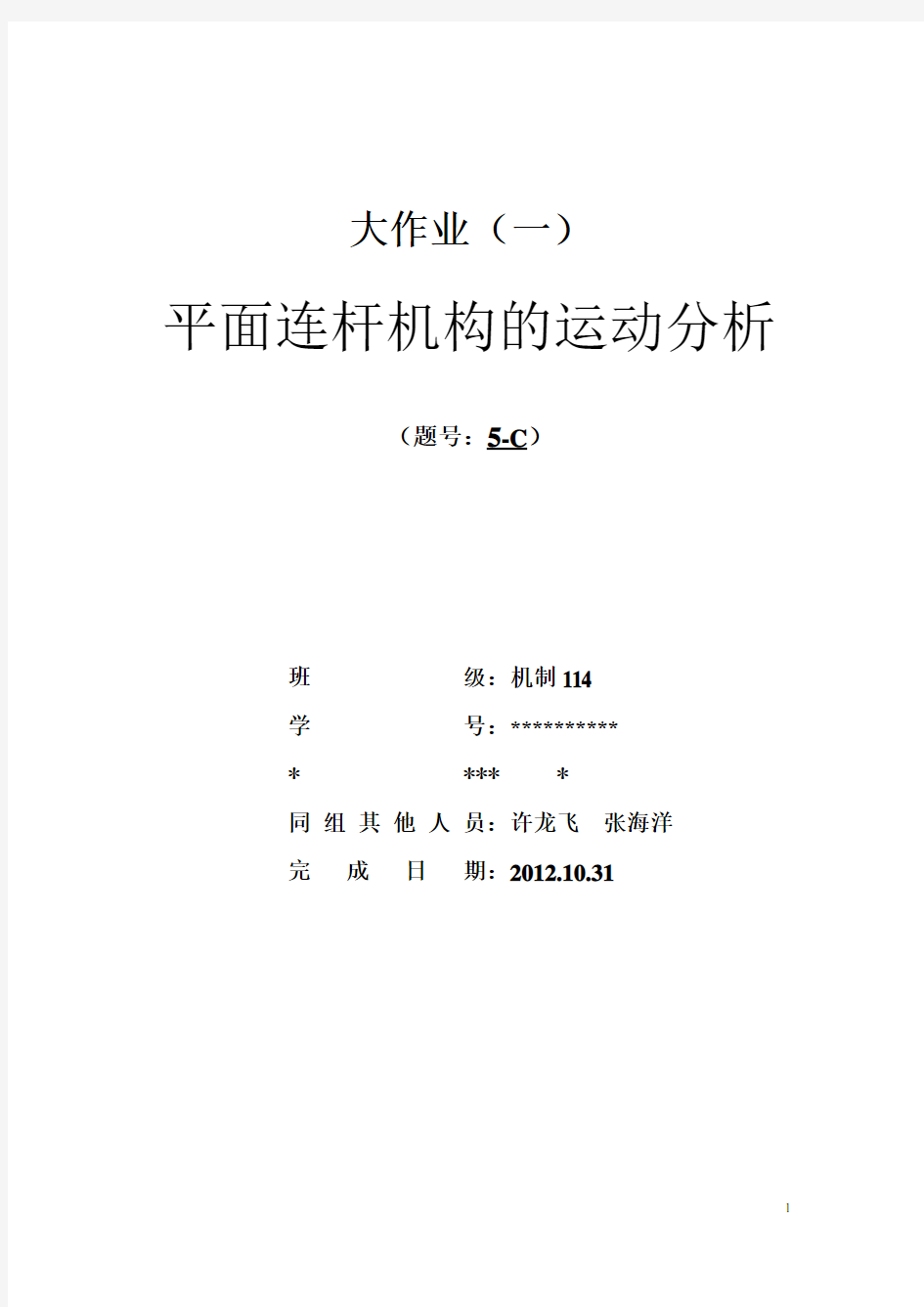
图b 所示的为一牛头刨床(Ⅲ级机构)。假设已知各构件的尺寸如表2所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C 点的位移、速度和加速度的变化情况。
G
b )
表2 牛头刨床机构的尺寸参数(单位:mm )
题 号
l AB l CD l DE h h 1 h 2 A B C 5-c
200
180
900
460
120
l CD =950
l CD =1020
l CD =980
要求:每三人一组,每人一个题目,每组中至少打印出一份源程序,每人计算出原动件从0゜~360゜时(N=36) 各运动变量的大小,并绘出各组对应的运动线图以
及E 点的轨迹曲线。
二、牛头刨床机构的运动分析方程
1)位置分析
建立封闭矢量多边形 由图可知
=3θ,故未知量有3θ、4θ、3S 、5S 。利用两个封闭图形ABDEA 和EDCGE ,
建立两个封闭矢量方程,由此可得:
A B C
D
E
2 1
3
4 5
6
h
h 1
h 2
x
y F
F'
把(式Ⅰ)写成投影方程得:???
?
??????????=+=-++=++=+h l l s l l l h s l l h s l 33445334411133441123344sin sin 0cos cos sin sin sin cos cos cos θθθθθθθθθθ(式Ⅱ)
由以上各式用型转化法可求得5343 s s θθ,
23θθ=
解: 211111
*cos *sin b b x h l y h l θθ=+??
=+?
44
44
*cos *sin d d x l y l θθ=??
=? 223()()d b d b s x x y y =-++ 3
sin b d
x x s α-=
333
33)*sin *()/*cos *(/c d d b d c
d d b d s x x l x l x x s y y l y l y y s αα=+=+-???
=+=+-?? 3tan c d
c d
y y x x θ-=
-
5c s x =
()2212ae AE h h =+ 444
()
tan *cos d c y h y l θθ+-=
高斯消去法求解 2.速度分析
对(式Ⅱ)求一次导数得:
44433333111444333331114443335444333*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *'0*cos **cos *0l s l l s s l l l s l l θωθθωθωθωθθωθωθωθωθωθω-+-=-??++=?
?
---=?
?+=? (式Ⅲ)
矩阵式:
?????
???????-----0cos cos 0
1sin sin 00cos cos sin 0sin sin cos 4
43
344334433344333θθθθθθθ
θθθl l l l l s l s ??
????
????????'543'3s w w s =????????????-00cos sin 11111θθl l w (Ⅳ) 采用高斯消去法可求解(式Ⅳ)可解得角速度ω3,ω4;
3.加速度分析
把式Ⅳ对时间求导数得矩阵式:
??
???
??
??
???-----0cos cos 0
1sin sin 00cos cos sin 0sin sin cos 4
43
3443344333443
33θθθθθθθ
θθθl l l l l s l s ?????
?
????????''543''3s s αα = ??????
???
???
?
?----------0sin sin 00cos cos 00sin sin cos cos 0cos cos sin sin 4
443334443334443
333'
3334443
333'
333θθθθθθθθθθθθw l w l w l w l w l w s s w w l w s s w +?
???
????????--00sin cos 1111111θθw l w l w
(式Ⅴ)
采用高斯消去法可求解(式Ⅴ)可得角加速度43αα,
三.程序流程图
J =1,N
打印结果
调用高斯消去法子程序求解加速度方程(3)求得α2,α3,α4,
α5及α6(或BC l ,αC )再求出a Ex 及a Ey
B (K )=-DA (K ,Ⅱ)ω1(Ⅱ)+DB (K )
Ⅱ=1,N DB (K )=DB (K )ω1
K =1,N ω(1)=ω2,ω(2)=ω3 ω(3)=ω4,ω(4)=ω5
调用系数矩阵A 子程序,并计算其矩阵D A 调用系数矩阵B 子程序,并计算其矩阵D B
调用高斯消去法子程序求解速度方程(2)求得ω2,ω3,ω4,ω5及ω6(或BC l ,v C )再求出v Ex 及v Ey
B (J )=B (J )ω1
J =1,N 调用系数矩阵A 子程序,并计算A
调用原动件位置参数列阵B 子程序,并计算B
θI =(I -1)×10゜
调用牛顿迭代法子程序求解位置方程(1)求得θ2,θ3,θ4,θ5及θ6(或l BC ,s 5)并计算x G 及y G
读入:l 1,l 2,l 2′,l 3,l 4,l 5,l 6,x G 及y G 和θ2,θ3,θ5及θ6(或l AB ,l CD ,l DE ,h ,h 1,h 2及l BD ,θ2,θ3,θ4及θ5)的初值,N ,ω1,E
开始
位置分析
速度分析
加速度分析
四、计算源程序
#include
#define E 0.0001 #define T 1000
void Solutionangle(double [12],double ); /*迭代法求角位移*/
迭代次数IT =0
调用位置方程(1)子程序代入θi 的初值,并计算f i
停止
求得θi 值
|f i |≤E
调用系数矩阵A
IT >IT max ?
调用高斯消去法子程序 求解A △θi =f i ,求出△θi
θi =θi +△θi
IT =IT +1
Y
N
Y
N
void Solutionspeed(double [N][N],double [N],double [12],double ); /*角速度求解*/
void Solutionacceleration(double [N][N],double [N][N],double [N],double [12]);/*角加速度求解*/
void GaussianE(double [N][N],double [N],double [N]);/*高斯消去*/
void FoundmatrixA(double [12],double [N][N]); //创建系数矩阵A
void FoundmatrixB(double [12],double ,double [N]);//创建系数矩阵B
void FoundmatrixDA(double [12],double [N][N]);//创建矩阵DA
void FoundmatrixDB(double [12],double ,double [N]);//创建矩阵DB
//定义全局变量
double l1=200,l3=980,l4=180,h=900,h1=460,h2=120,as1=1.0;
//主函数
void main()
{
int i,j;
FILE *fp;
double shuju[36][12];
double psvalue[12],a[N][N],da[N][N],b[N],db[N],ang1;
//建立文件,并制表头
if((fp=fopen("shuju","w"))==NULL)
{
printf("Cann't open this file.\n");
exit(0);
}
fprintf(fp,"\n L1 =%lf",l1);
fprintf(fp,"\n s3 ang3 ang4 s5 ");
fprintf(fp," s3' as3 as4 s5' ");
fprintf(fp," s3'' aas3 aas4 s5'' \n");
//计算数据并写入文件
psvalue[0]=480;psvalue[1]=65*PI/180;psvalue[2]=10*PI/180;psvalue[3]=500;
for(i=0;i<36;i++)
{
ang1=i*PI/18;
Solutionangle(psvalue,ang1);
FoundmatrixB(psvalue,ang1,b);
FoundmatrixA(psvalue,a);
Solutionspeed(a,b,psvalue,ang1);
FoundmatrixDA(psvalue,da);
FoundmatrixDB(psvalue,ang1,db);
Solutionacceleration(a,da,db,psvalue);
for(j=1;j<3;j++)
psvalue[j]=psvalue[j]*180/PI;
for(j=0;j<12;j++)
{shuju[i][j]=psvalue[j];}
fprintf(fp,"\n");
for(j=0;j<12;j++)
fprintf(fp,"%12.3f ",shuju[i][j]);
for(j=1;j<3;j++)
psvalue[j]=psvalue[j]*PI/180;
for(j=0;j<4;j++)
psvalue[j]+=psvalue[j+4];
}
fclose(fp);
//输出数据
for(i=0;i<36;i++)
{
ang1=i*PI/18;
printf("\n输出ang1=%d时的求解\n",i*10);
printf("angle angspeed angacceleration :\n"); for(j=0;j<4;j++)
printf("%lf\t",shuju[i][j]);
printf("\n");
for(j=4;j<8;j++)
printf("%lf\t",shuju[i][j]);
printf("\n");
for(j=8;j<12;j++)
printf("%lf\t",shuju[i][j]);
printf("\n");
}
}
/*矢量法求角位移*/
void Solutionangle(double value[12],double ang1)
{
double ae,s3,ang3,ang4,s5,t=0;
s3=value[0];ang3=value[1];ang4=value[2];s5=value[3];
double xb,yb,xd,yd,xc,yc;
while(t { xb=h2+l1*cos(ang1); yb=h1+l1*sin(ang1); xd=l4*cos(ang4); yd=l4*sin(ang4); s3=sqrt((xd-xb)*(xd-xb)+(yd-yb)*(yd-yb)); xc=xd+l3*(xb-xd)/s3; yc=yd+l3*(yb-yd)/s3; ang3=atan2(yc-yd,xc-xd); s5=xc; ae=sqrt(h1*h1+h2*h2); if(fabs(yc-h) return; else ang4=atan((yd-yc+h)/(l4*cos(ang4))); value[0]=s3;value[1]=ang3;value[2]=ang4;value[3]=s5; while(value[1]>2*PI) value[1]-=2*PI; while(value[1]<0) value[1]+=2*PI; while(value[2]>PI) value[2]-=2*PI; while(value[2]<-PI) value[2]+=2*PI; t+=1; if(t>=T) {printf("%f 迭代失败.\n",ang1*180/PI);exit(0);} } } /*角速度求解*/ void Solutionspeed(double a2[N][N],double b2[N],double value[12],double ang1) { double p2[N]; GaussianE(a2,b2,p2); value[4]=p2[0]; value[5]=p2[1]; value[6]=p2[2]; value[7]=p2[3]; } /*角加速度求解*/ void Solutionacceleration(double a3[N][N],double da3[N][N],double db3[N],double value[12]) { int i,j; double bk[N]={0}; double p3[N]; for(i=0;i { for(j=0;j { bk[i]+=-da3[i][j]*value[4+j]; } bk[i]+=db3[i]*as1; } GaussianE(a3,bk,p3); value[8]=p3[0]; value[9]=p3[1]; value[10]=p3[2]; value[11]=p3[3]; } /*高斯消去法解矩阵方程*/ void GaussianE(double a4[N][N],double b4[N],double p4[N]) { int i,j,k; double a4g[N][N],b4g[N],t; for(i=0;i for(j=0;j a4g[i][j]=a4[i][j]; for(i=0;i b4g[i]=b4[i]; //施主对角线上的值尽可能大 if(a4g[0][0] { for(j=0;j {t=a4g[0][j];a4g[0][j]=a4g[1][j];a4g[1][j]=t;} t=b4g[0];b4g[0]=b4g[1];b4g[1]=t; } if(a4g[2][2] { for(j=0;j {t=a4g[2][j];a4g[2][j]=a4g[3][j];a4g[3][j]=t;} t=b4g[2];b4g[2]=b4g[1];b4g[3]=t; } //初等行变换 for(j=0;j for(i=0;i { if(i!=j) { for(k=0;k if(k!=j) {a4g[i][k]-=a4g[i][j]/a4g[j][j]*a4g[j][k];} b4g[i]-=b4g[j]*a4g[i][j]/a4g[j][j]; a4g[i][j]=0; } } for(i=0;i b4g[i]/=a4g[i][i]; p4[0]=b4g[0]; p4[1]=b4g[1]; p4[2]=b4g[2]; p4[3]=b4g[3]; } //创建系数矩阵A void FoundmatrixA(double value5[12],double a5[N][N]) { double s3,ang3,ang4,s5; s3=value5[0];ang3=value5[1];ang4=value5[2];s5=value5[3]; a5[0][0]=cos(ang3);a5[0][1]=-s3*sin(ang3);a5[0][2]=-l4*sin(ang4); a5[1][0]=sin(ang3);a5[1][1]=s3*cos(ang3);a5[1][2]=l4*cos(ang4); a5[2][1]=-l3*sin(ang3);a5[2][2]=-l4*sin(ang4);a5[2][3]=-1; a5[3][1]=l3*cos(ang3);a5[3][2]=l4*cos(ang4); a5[0][3]=a5[1][3]=a5[2][0]=a5[3][0]=a5[3][3]=0; } //创建系数矩阵B void FoundmatrixB(double value6[12],double ang1,double b6[N]) { b6[0]=-l1*sin(ang1)*as1; b6[1]=l1*cos(ang1)*as1; b6[2]=b6[3]=0; } //创建矩阵DA void FoundmatrixDA(double value7[12],double da7[N][N]) { double s3,ang3,ang4,s5,s3g,as3,as4,s5g; s3=value7[0];ang3=value7[1];ang4=value7[2];s5=value7[3]; s3g=value7[4];as3=value7[5];as4=value7[6];s5g=value7[7]; da7[0][0]=-as3*sin(ang3); da7[0][1]=-s3g*sin(ang3)-s3*cos(ang3)*as3; da7[0][2]=-l4*cos(ang4)*as4; da7[1][0]=as3*cos(ang3); da7[1][1]=s3g*cos(ang3)-s3*sin(ang3)*as3; da7[1][2]=-l4*sin(ang4)*as4; da7[2][1]=-l3*cos(ang3)*as3; da7[2][2]=-l4*cos(ang4)*as4; da7[3][1]=-l3*sin(ang3)*as3; da7[3][2]=-l4*sin(ang4)*as4; da7[0][3]=da7[1][3]=da7[2][0]=da7[2][3]=da7[3][0]=da7[3][3]=0; } //创建矩阵DB void FoundmatrixDB(double value8[12],double ang1,double db8[N]) { db8[0]=-l1*as1*cos(ang1); db8[1]=-l1*as1*sin(ang1); db8[2]=db8[3]=0; } 四、计算结果、数据 10—B: lAB =200, lCD =980, lDE =180,h=900,h1=460,h2=120 程序运行结果: 输出ang1=0时的求解 angle angspeed angacceleration : 522.014000 73.889657 -13.334515 447.085666 222.612884 0.109144 -0.169460 -109.795947 16.380845 0.271181 -0.363814 -278.693781 输出ang1=10时的求解 angle angspeed angacceleration : 560.808195 75.192265 -15.285477 424.097038 220.245408 0.149057 -0.215014 -151.427349 -41.388177 0.191355 -0.167429 -202.836941 输出ang1=20时的求解 angle angspeed angacceleration : 598.371498 76.832918 -17.536295 394.870254 208.865598 0.177564 -0.230948 -181.963971 -87.198696 0.139306 -0.022750 -150.3676565 输出ang1=30时的求解 angle angspeed angacceleration : 633.303467 78.719575 -19.832215 361.022782 190.367287 0.198836 -0.225110 -204.841992 -123.368682 0.107129 0.084840 -113.936398 输出ang1=40时的求解 angle angspeed angacceleration : 664.494921 80.795120 -21.983193 323.678749 166.236875 0.215719 -0.202605 -222.333557 -152.035606 0.088080 0.170405 -87.871728 输出ang1=50时的求解 angle angspeed angacceleration : 691.071076 83.025629 -23.838419 283.640827 137.648023 0.230080 -0.166291 -235.907847 -174.649910 0.077651 0.244421 -68.605876 输出ang1=60时的求解 angle angspeed angacceleration : 712.340397 85.392484 -25.267831 241.501021 105.569271 0.243156 -0.117596 -246.558178 -192,155641 0.072960 0.312997 -54.127166 输出ang1=70时的求解 angle angspeed angacceleration : 727.767160 87.887237 -26.151326 197.702935 70.830539 0.255767 -0.057191 -255.018869 -205.232928 0.072046 0.378790 -43.398629 输出ang1=80时的求解 angle angspeed angacceleration : 736.952123 90.508050 -26.374120 152.574533 34.152478 0.268434 0.014464 -261.898499 -214.478065 0.073352 0.441720 -35.968710 输出ang1=90时的求解 angle angspeed angacceleration : 739.611289 93.257021 -25.826642 106.342296 -3.849713 0.281416 0.096709 -267.758715 -220.516076 0.075410 0.499634 -31.708760 输出ang1=100时的求解 angle angspeed angacceleration : 735.560073 96.137475 -24.408389 59.136226 -42.676328 0.294714 0.188387 -273.151120 -224.049355 0.076712 0.549251 -30.609018 输出ang1=110时的求解 angle angspeed angacceleration : 724.688533 99.151471 -22.033198 10.989963 -81.956258 0.308059 0.287768 -278.623093 -225.838516 0.075696 0.587489 -32.593012 输出ang1=120时的求解 angle angspeed angacceleration : 706.939852 102.297024 -18.634531 -38.156237 -121.449233 0.320908 0.392697 -284.687938 -226.594208 0.070739 0.612685 -37.303375 输出ang1=130时的求解 angle angspeed angacceleration : 68.20290249 105.565189 -14.168454 -88.443330 -161.017670 0.332411 0.500867 -291.748261 -226.723516 0.059901 0.624641 -43.754617 输出ang1=140时的求解 angle angspeed angacceleration : 650.737139 108.936603 -8.614266 -140.061836 -200.531140 0.341302 0.609907 -299.930309 -255.765187 0.040131 0.622090 -49.583360 输出ang1=150时的求解 angle angspeed angacceleration : 612.315312 112.375982 -1.977605 -193.176291 -239.617870 0.345578 0.716673 -308.714873 -221.101157 0.005739 0.595765 -49.342999 输出ang1=160时的求解 angle angspeed angacceleration : 567.185502 115.821124 5.691223 -247.749768 -277.077820 0.341880 0.814771 -316.133278 -205.272464 -0.053289 0.54817 -31.192508 输出ang1=170时的求解 angle angspeed angacceleration : 515.870676 119.169186 14.240725 -303.173584 -309.711702 0.324801 0.889206 -317.312247 -162.342277 -0.149359 0.309200 26.557391 输出ang1=180时的求解 angle angspeed angacceleration : 459.736591 122.250306 23.296980 -357.622443 -330.882092 0.287568 0.909623 -303.094714 -70.781192 -0.281221 -0.118686 147.981803 输出ang1=190时的求解 angle angspeed angacceleration : 401.580374 124.841527 32.113050 -407.417626 -331.393840 0.227035 0.833720 -262.378705 70.860322 -0.405095 -0.779467 323.287453 输出ang1=200时的求解 angle angspeed angacceleration : 345.601374 126.736488 39.557295 -447.394930 -305.713458 0.150370 0.635134 -190.902531 220.208735 -0.460022 -1.481879 488.429735 输出ang1=210时的求解 angle angspeed angacceleration : 296.255549 127.836115 44.438936 -472.617327 -256.152024 0.069373 0.324483 -94.586135 344.531522 -0.468511 -2.059184 611.488527 输出ang1=220时的求解 angle angspeed angacceleration : 257.436532 128.106790 45.723120 -479.123843 -184.650096 -0.017750 -0.085424 24.696180 484.898930 -0.558683 -2.679396 775.395661 输出ang1=230时的求解 angle angspeed angacceleration : 233.719809 127.355391 42.243258 -461.368345 -79.191865 -0.144893 -0.646559 191.110181 761.639732 -0.995423 -3.939554 1208.929284 输出ang1=240时的求解 angle angspeed angacceleration : 234.071666 124.707514 31.620359 -404.722138 100.441985 -0.429858 -1.564880 493.986610 1340.143540 -2.568645 -6.872102 2445.658479 输出ang1=250时的求解 angle angspeed angacceleration : 271.748057 117.550559 9.958739 -275.992608 298.830390 -1.017581 -2.601699 965.135135 164.273001 -2.714428 -0.676858 1648.883993 输出ang1=260时的求解 angle angspeed angacceleration : 314.977255 106.703727 -12.398496 -105.872354 167.827583 -1.022668 -1.638544 896.599086 -899.378679 1.535826 7.454551 -1330.906898 输出ang1=270时的求解 angle angspeed angacceleration : 333.988579 97.822386 -23.190057 32.076131 67.835333 -0.764345 -0.616166 698.413214 -299.596018 1.237342 4.262974 -884.041915 输出ang1=280时的求解 angle angspeed angacceleration : 342.920418 91.103735 -26.323220 142.457818 42.014408 -0.592985 -0.069383 575.479362 -37.439886 0.770810 2.223328 -571.930530 输出ang1=290时的求解 angle angspeed angacceleration : 350.344174 85.766961 -25.441721 234.880989 46.184121 -0.480795 0.213968 486.438796 71.729942 0.548100 1.124212 -472.904148 输出ang1=300时的求解 angle angspeed angacceleration : 359.836430 81.409077 -22.541832 312.639225 64.340152 -0.392725 0.345817 404.414987 132.171774 0.480478 0.426245 -478.632047 输出ang1=310时的求解 angle angspeed angacceleration : 373.317784 77.902481 -18.876886 375.703694 91.430085 -0.307975 0.371382 316.741061 176.344415 0.500856 -0.117502 -529.752642 输出ang1=320时的求解 angle angspeed angacceleration : 392.134079 75.274641 -15.404003 422.636190 125.027903 -0.216075 0.310168 219.628153 204.926729 0.551770 -0.563552 -578.244344 输出ang1=330时的求解 angle angspeed angacceleration : 417.108714 73.603990 -12.887562 452.095021 161.056380 -0.117681 0.185528 118.085483 200.979221 0.563814 -0.822551 -572.961710 输出ang1=340时的求解 angle angspeed angacceleration : 448.095547 72.905095 -11.765359 464.294674 192.684812 -0.024090 0.039382 24.010988 155.251178 0.496009 -0.808098 -494.712898 输出ang1=350时的求解 angle angspeed angacceleration : 483.749757 73.064801 -12.025378 461.514263 213.844100 0.052639 -0.085354 -52.550481 85.553490 0.380395 -0.603605 -381.330936 ang1 ang3 ang4 as3 as4 aas3 aas4 θ1 θ3 θ4 ω3 ω4 α3 α4 0 73.889657 -13.334515 0.109144 -0.169460 0.271181 -0.363814 10 75.192265 -15.285477 0.149057 -0.215014 0.191355 -0.167429 20 76.832918 -17.536295 0.177564 -0.230948 0.139306 -0.022750 30 78.719575 -19.832215 0.198836 -0.225110 0.107129 0.084840 40 80.795120 -21.983193 0.215719 -0.202605 0.088080 0.170405 50 …… …… ang1 s3 s5 s3' s5' s3'' s5'' θ1 s3 s5 v3 v5 a3 a5 0 522.014000 447.085666 222.612884 -109.795947 16.380845 -278.693781 10 560.808195 424.097038 220.245408 -151.427349 -41.388177 -202.836941 20 598.371498 394.870254 208.865598 -181.963971 -87.198696 -150.3676565 30 633.303467 361.022782 190.367287 -204.841992 -123.368682 -113.936398 40 664.494921 323.678749 166.236875 -222.333557 -152.035606 -87.871728 50 …… …… 五.运动线图及分析 θ3,θ 4 -40 -20020406080100120140050 100 150 200 250 300 350 400 θ3θ4 ω3,ω4 -3 -2.5-2-1.5-1-0.500.511.5050 100 150 200 250 300 350 400 ω3ω4 α3,α 4 -8 -6-4-20246810050 100 150 200 250 300 350 400 α3α4 S3,S5 -600 -400-200020040060080010000100 200 300 400 S3S5 V3,V5 -400 -2000200400600800100012000100200300400 V3V5 a3,a5 -2000 -1500-1000-5000500100015002000250030000100 200 300 400 a3a5 机构运动分析: (1)、从θ3-θ1,θ4-θ1曲线图可知,3杆为摆动导杆, 4杆为摇杆, (2)、从ω3-θ1、ω4-θ1容易看出:在θ1为0 o ~200 o 之间,3杆角速度 变化较为平缓,保证刨头慢速、稳定工作;在220 o ~340 o 之间为回程阶段,角速度变化较快,以提高效率;4杆有4个角速度为0点,即4杆的速度方向改变了四次。 (3)、从加速度变化曲线图可知,3杆、4杆没有刚性冲击和柔性冲击,在工作 行程阶段杆件受力较为稳定。 (4)、2杆角位移、角速度、角加速度与3杆一致。 C 点的位移、速度和加速度分析: 结合以上图形可以看出,在0°~200°范围内C 点位移曲线斜率的绝对值变化较小,说明此时C 点速度及加速度的变化量不大,且保持在较小值。200°~260°范围内C 点的加速度和速度变化量都明显增大,其中加速度在220°左右 达到最大值后快速减小,并使其速度在260°左右达到最大,而后加速度反向缓慢增大,速度持续减小到零以后又开始反向增大。 (1)、工作行程为θ1:0 o~200 o,回程为θ1:220 o~340 o;工作行程角度大于回程角度,工作效率较高; (2)、工作行程阶段,刨头C点位移的变化较为平稳,速度可以近似看为匀速,而加速度变化不大,刨头受力较为稳定,满足工作要求的可靠性;(3)、回程阶段不带负载,刨头C点位移的变化较快但平稳,允许较大的速度变化值,从加速度曲线图上可知没有刚性冲击,也没有柔性冲击,受力方向及大小改变较大的位置为回程的初始部分。充分显示了牛头刨床慢进急回的设计特点。 C点的位移、速度和加速度图像对比分析: 由图像可知,随着h1的增大,C点的位移曲线、速度曲线和加速度曲线的最大值均逐渐减小,说明C点运动更趋于平稳,工作性能更可靠,更符合本机构设计。 六.参考书 《机械原理》第七版刘鸿文主编 《机械原理》(第七版)孙桓主编 《机械原理课程设计指导书》罗洪田主编 《C程序设计教程》谭浩强著 七. 心得体会 通过这次课程设计我有了很多收获。首先,通过这一次的课程设计,我进一步巩固和加深了所学的基本理论、基本概念和基本知识,培养了自己分析和解决与本课程有关的具体机械所涉及的实际问题的能力。对平面连杆机构有了更加深刻的理解,为后续课程的学习奠定了坚实的基础。而且,这次课程设计过程中,与同学激烈讨论,团结合作,最终实现了预期的目的,大家都受益匪浅,也对这次经历难以忘怀。其次通过这次课程设计,对牛头刨床的工作原理及内部各传动机构及机构选型、运动方案的确定以及对导杆机构运动分析有了初步详细精确的了解,这都将为我以后参加工作实践有了很大的帮助。非常有成就感,培养了很深的学习兴趣。 机械优化设计在matlab中的应用 东南大学机械工程学院** 一优化设计目的: 在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 二优化设计步骤: 1.机械优化设计的全过程一般可以分为如下几个步骤: 1)建立优化设计的数学模型; ' 2)选择适当的优化方法; 3)编写计算机程序; 4)准备必要的初始数据并伤及计算; 5)对计算机求得的结果进行必要的分析。 其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。 2.建立数学模型的基本原则与步骤 ①设计变量的确定; 设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。设计变量的全体实际上是一组变量,可用一个列向量表示: - x=。 ②目标函数的建立; 选择目标函数是整个优化设计过程中最重要的决策之一。当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。 目标函数的一般表达式为: f(x)=,要根据实际的设计要求来设计目标函数。 ③约束条件的确定。 一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。 由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为 … 第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题: 23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。 平面连杆机构 一、填空: 1. 由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2 .铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件 称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与 连架杆相联接,传递运动和动力的构件称为连杆。 4. 铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)a+b≤c+d 。 (2)以__b或d__为机架,贝U __a__为曲柄。 图1-1 6. 在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。 7 .如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9. 机构中传动角丫和压力角α之和等于90°。 10. 通常压力角α是指力F与C点的绝对速度V C之间间所夹锐角 二、选择题: 1 ?在曲柄摇杆机构中,只有当C?摇杆为主动件时,才会出现“死点” 位 置。 A.连杆 B.机架 C.摇杆 D ?曲柄 2. 绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机 构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C.有时有曲柄,有时没曲柄 D.以上答案均不对 3. 当急回特性系数为 C. K > 1 时,曲柄摇杆机构才有急回运动。 A. K V1 B. K = 1 C. K > 1 D. K = 0 4. 当曲柄的极位夹角为 D. θ> 0 时,曲柄摇杆机构才有急回运动。 A. θ V 0 B. θ=O C. θ≤ 0 D. θ > 0 5. 当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。 A.按原运动方向 B.反方向 C. 不确定的 D. 以上答案均不对 6. 曲柄滑决机构是由 A.曲柄摇杆机构演化而来的。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D.以上 答案均不对 7. 平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之 和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C. 双摇杆机构 D.以上 答案均不对 8. 平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 平面连杆机构综合计算机编程作业 从下列题目任选一题进行设计,要求建立几何模型和数学模型,选用一种计算机语言编制程序,要求能够在动画演示时能够显示最小传动角,在输出设计参数时能够通过动画检验设计效果并将最小传动角输出。 作业要求:解题过程(包括几何模型、数学模型建立)以论文格式用word文件编写,力求完善;并在其后列出其程序清单。软件以exe文件格式。 一、某机器的工作装置需采用铰链四杆机构进行位置导引,已知工作装置上某一点在空间的位置为P1(x1,y1),θ1;P2(x2,y2),θ2 ;P3(x3,y3),θ3 ;试根据所学知识编制一计算机程序实现该装置的机构设计。 要求: 1.采用参数化方法,P1,P2,P3可任意输入,能够完成二、三位置的设计; 2.写出设计过程及程序清单汇成一设计说明书,其中还应包含一定的检验方法; 二、如图所示,设要求四杆机构两连架杆的三组对应位置分别为α1=35°,φ1 =50°;α2=80°,φ2=75°;α3=125°,φ3=105°,试以解析法设计此四杆机构。形成可执行的计算机设计程序; 写出设计说明书,并对设计中的具体考虑进行说明。 三、造型机工作台翻转的铰链四杆机构ABCD,连杆BC(长度根据需要设定)两个位置如图所示,机架AD水平布置,γi≥40°,试设计出此机构(要求扼要说明设计步骤,确定主动件及其转向)。 腹有诗书气自华 腹有诗书气自华 四. 已知三个给定刚体位置,P 1(1,1),θ1=0°;P 2(1.5,0.5),θ2=10°;P 3(2.5,1.0),θ3=45°。并要求在各个给定位置时传动角γi ≥30°(i =1,2,3)试综合一个导引曲柄滑块机构。 五. 如图所示,已知主动连架杆AB 的长度l AB =16mm ,机架AD 的长度l AD =50mm ,当AB 从图示位置顺时针转过某一角度时,连杆平面上的E 点经过E 1,E 2,E 3三点。DE 1==30mm ,E 1E 2=E 2E 3=12mm 。试综合能实现连杆E 点的铰链四杆机构ABCD 。 六. 已知固定铰链点A (0,0),D (1,4),连架杆AB 的长度为l AB =15mm ,连架杆AB 与连杆的三组对应位置如图所示。试综合该全铰链四杆机构并写出各构件的杆长。 七. 欲设计一个夹紧机构,拟采用全铰链四杆机构ABCD 。已知连杆的两个位置:x P1=0.5,y P1=0.5,θ1=20°,x P2=1.5,y P2=1.8,θ 2=38°,如图示。连杆到达第二位置时为夹紧位置, 即若以CD 为主动件,则在此位置时,机构应处于死 大学普通高等教育 机械原理课程设计 题目题号:插床导杆机构位置3的设计 学院:机电工程学院 专业班级: 学生: 指导教师 成绩: 2013 年7月 2 日 目录 一、工作原理 二、设计要求 三、设计数据 四、设计容及工作量五. 设计计算过程 (一). 方案比较与选择 (二). 导杆机构分析与设计 1.机构的尺寸综合 2. 导杆机构的运动分析 一、工作原理: 插床机械系统的执行机构主要是由导杆机构和凸轮机构组成。下图为其参考示意图,电动机经过减速传动装置(皮带和齿轮传动)带动曲柄2转动,再通过导杆机构使装有刀具的滑块6沿导路y —y 作往复运动,以实现刀具的切削运动。刀具向下运动时切削,在切削行程H 中,前后各有一段0.05H 的空刀距离,工作阻力F 为常数;刀具向上运动时为空回行程,无阻力。为了缩短回程时间,提高生产率,要求刀具具有急回运动。刀具与工作台之间的进给运动,是由固结于轴O 2上的凸轮驱动摆动从动件D O l 8和其它有关机构(图中未画出)来完成的。 二、设计要求: 电动机轴与曲柄轴2平行,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄2转速偏差为±5%。要求导杆机构的最小传动角不得小于60o ;凸轮机构的最大压力角应在许用值[α]之,摆动从动件8的升、回程运动规律均为等速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计。 三、插床导杆机构设计数据 四、设计容及工作量: 1、根据插床机械的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸, ()46.0~5.0BO BC l l =。要求用图解法设计,并将 设计结果和步骤写在设计说明书中。 3、导杆机构的运动分析。分析导杆摆到两个极限位置及摆到与机架O 2O 4位于同一直线位置时,滑块6的速度和加速度。 4、凸轮机构设计。根据所给定的已知参数,确定凸轮机构的基本尺寸(基圆半径r o 、机架82O O l 和滚子半径r b ),并将运算结果写在说明书中。用几何法画出凸轮机构的实际廓线。 5、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 6、按1:2绘制所设计的机构运动简图。 平面连杆机构优化设计 一、问题描述 平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。 设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π 32 ??ψψ-+ =。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。 图1 机构运动简图 二、基本思路 四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π 32 ??ψψ-+ =。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MATLAB 优化工具箱的相关函数进行求解。 三、要点分析 优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。 1.设计变量的确定 通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即 T 04321T 54321)()(?l l l l x x x x x ==X (1) 考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即 4 212 32 42210)(2)(cos arc l l l l l l l +-++=?(2) 平面连杆机构 一、填空: 1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。 4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)__a+b≤c+d_____。 (2)以__b或d__为机架,则__a__为曲柄。 图1-1 6.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。 7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9.机构中传动角γ和压力角α之和等于90°。 10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。 二、选择题: 1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位 置。 A.连杆 B.机架 C.摇杆 D.曲柄 2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对 3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。 A. K<1 B. K=1 C. K>1 D. K=0 4.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。 A.θ<0 B.θ=0 C. θ≦0 D. θ﹥0 5.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。 A.按原运动方向 B.反方向 C.不确定的 D. 以上答案均不对 6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。 A. 曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 7.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 8.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 课程设计任务书 目录 1 绪论 (1) 1.1CATIA V5软件介绍 (1) 1.2ADAMS软件介绍 (1) 1.3S IM D ESIGNER软件介绍 (2) 1.4本次课程设计的主要内容及目的 (2) 2 曲柄连杆机构的建模 (3) 2.1活塞的建模 (3) 2.2活塞销的建模 (5) 2.3连杆的建模 (5) 2.4曲轴的建模 (6) 2.5汽缸体的建模 (8) 3 曲柄连杆机构的装配 (10) 3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10) 4 曲柄连杆机构导入ADAMS (14) 4.1曲柄连杆机构各个零部件之间运动副分析 (14) 4.2曲柄连杆机构各个零部件之间运动副建立 (14) 4.3曲柄连杆机构导入ADAMS (16) 5 曲柄连杆机构的运动学分析 (17) 结束语 (21) 参考文献 (22) 1 绪论 1.1 CATIA V5软件介绍 CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。 由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。 CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。 1.2 ADAMS软件介绍 ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、 平面连杆机构 一、复习思考题 1、什么是连杆机构?连杆机构有什么优缺点? 2、什么是曲柄?什么是摇杆?铰链四杆机构曲柄存在条件是什么? 3、铰链四杆机构有哪几种基本形式? 4、什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响? 5、什么叫行程速比系数?如何判断机构有否急回运动? 6、平面连杆机构和铰链四杆机构有什么不同? 7、双曲柄机构是怎样形成的? 8、双摇杆机构是怎样形成的? 9、述说曲柄滑块机构的演化与由来。 10、导杆机构是怎样演化来的? 11、曲柄滑块机构中,滑块的移动距离根据什么计算? 12、写出曲柄摇杆机构中,摇杆急回特性系数的计算式? 13、曲柄摇杆机构中,摇杆为什么会产生急回运动? 14、已知急回特性系数,如何求得曲柄的极位夹角? 15、平面连杆机构中,哪些机构在什么情况下才能出现急回运动? 16、平面连杆机构中,哪些机构在什么情况下出现“死点”位置? 17、曲柄摇杆机构有什么运动特点? 18、试述克服平面连杆机构“死点”位置的方法。 19、在什么情况下曲柄滑块机构才会有急回运动? 20、曲柄滑块机构都有什么特点? 21、试述摆动导杆机构的运动特点? 22、试述转动导杆机构的运动特点。 23、曲柄滑块机构与导杆机构,在构成上有何异同? 二、填空题 1、平面连杆机构是由一些刚性构件用副和副相互联接而组成的机构。 2、平面连杆机构能实现一些较复杂的运动。 3、当平面四杆机构中的运动副都是副时,就称之为铰链四杆机构;它是其他多杆机构的。 4、在铰链四杆机构中,能绕机架上的铰链作整周的叫曲柄。 5、在铰链四杆机构中,能绕机架上的铰链作的叫摇杆。 6、平面四杆机构的两个连架杆,可以有一个是,另一个是,也可以两个都是或都是。 7、平面四杆机构有三种基本形式,即机构,机构和机构。 8、组成曲柄摇杆机构的条件是:最短杆与最长杆的长度之和或其他两杆的长度之和;最短杆的相邻构件为,则最短杆为。 9、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作____ 运动,即得到双曲柄机构。 10、在机构中,如果将杆对面的杆作为机架时,则与此相连的两杆均为摇杆,即是双摇杆机构。 11、在机构中,最短杆与最长杆的长度之和其余两杆的长度之和时,则不论取哪个杆作为,都可以组成双摇杆机构。 12、曲柄滑块机构是由曲柄摇杆机构的长度趋向而演变来的。 13、导杆机构可看做是由改变曲柄滑块机构中的而演变来的。 14、将曲柄滑块机构的改作固定机架时,可以得到导杆机构。 15、曲柄摇杆机构产生“死点”位置的条件是:摇杆为件,曲柄为件或者是把运动转换成运动。 16、曲柄摇杆机构出现急回运动特性的条件是:摇杆为件,曲柄为件或者是把` 运动转换成。 17、曲柄摇杆机构的不等于00,则急回特性系数就,机构就具有急回特性。 18、实际中的各种形式的四杆机构,都可看成是由改变某些构件的,或选择不同构件作为等方法所得到的铰链四杆机构的演化形式。 19、若以曲柄滑块机构的曲柄为主动件时,可以把曲柄的运动转换成滑块的运动。 20、若以曲柄滑块机构的滑块为主动件时,在运动过程中有“死点”位置。 21、通常利用机构中构件运动时的惯性,或依靠增设在曲柄上的惯性来渡过“死点”位置。 22、连杆机构的“死点”位置,将使机构在传动中出现或发生运动方向等现象。 23、飞轮的作用是可以,使运转。 24、在实际生产中,常常利用急回运动这个特性,来缩短时间,从而提高。 大作业1 连杆机构运动分析 1、运动分析题目 如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、建立坐标系 建立以点A 为原点的固定平面直角坐标系 图1 3、对机构进行结构分析 该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。 图2 图 3 图 4 4、各基本杆组运动分析的数学模型 (1)同一构件上点的运动分析: 图 5 如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长 i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。 =cos =280cos B i x l ??; =sin =280sin B i y l ??; = =-sin =-B xB i B dx v l y dt ω?ω; ==cos =;B yB i B dy v l x dt ω?ω 222B 2==-cos =-B xB i d x a l x dt ω?ω; 2222==-sin =-B yB i B d y a l y dt ω?ω。 (2)RRRII 级杆组的运动分析: 图 6 如图6所示是由三个回转副和两个构件组成的II 级组。已知两杆 的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。求内运动副C 的位置(C C x 、y )、速度(xC yC v 、v )、加速度(xC yC a 、a )以及两杆 机械原理课程设计 任务书 题目:连杆机构设计B4 姓名:戴新吉 班级:机械设计制造及其自动化2011级3班 设计参数 设计要求: 1.用解析法按计算间隔进行设计计算; 2.绘制3号图纸1张,包括: (1)机构运动简图; (2)期望函数与机构实现函数在计算点处的对比表; (3)根据对比表绘制期望函数与机构实现函数的位移对比图; 3.设计说明书一份; 4.要求设计步骤清楚,计算准确。说明书规范。作图要符合国家标。按时独 立完成任务。 目录 第1节平面四杆机构设计连杆机构设计的基本问题 连杆机构设计的基本问题是根据给定的要求选定机构的型式,确定各构件的尺寸,同时还要满足结构条件(如要求存在曲柄、杆长比恰当等)、动力条件(如适当的传动角等)和运动连续条件等。 根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三类问题: (1)预定的连杆位置要求; (2)满足预定的运动规律要求; (3)满足预定的轨迹要求; 连杆设计的方法有:解析法、作图法和实验法。 作图法设计四杆机构 对于四杆机构来说,当其铰链中心位置确定后,各杆的长度也就确定了。用作图法进行设计,就是利用各铰链之间相对运动 的几何关系,通过作图确定各铰链的位置,从而定出各杆的长度。 作图法设计四杆机构的特点 图解法的特点是直观、简单、快捷,对三个设计位置以下的设计是十分方便的,其设计精度也能满足工作的要求,并能为解析法精确求解和优化设计提供初始值。 根据设计要求的不同分为四种情况: (1) 按连杆预定的位置设计四杆机构; (2) 按两连架杆预定的对应角位移设计四杆机构; (3) 按预定的轨迹设计四杆机构; (4) 按给定的急回要求设计四杆机构。 平面连杆机构的优化设计 【教学目标】 1.了解连杆机构优化设计的一般步骤 2.掌握连杆机构优化设计的方法 【教学重点】 1.掌握连杆机构优化设计的方法 【教学难点】 1.掌握连杆机构优化设计的方法 【教学准备】 多媒体课件、直尺、圆规。 【教学过程】 一、以工程实际案例引入课题 实例1:飞机起落架(结合最近美国波音飞机频繁失事的新闻) 实例2:汽车雨刮器 说明:平面连杆机构的实用在生产生活中随处可见,是机械设计当中常见的一种机构。 二、定义回顾 【提问】平面四杆机构的基本形式有哪些? 【预设】机械原理是本科第四学期的课程,学生可能记不全,要引导性地带大家回忆。 【答案】曲柄摇杆机构、双曲柄机构、双摇杆机构 三、回顾以前所学习的连杆机构设计方法,对比引入优化设计。 新课教授 一、曲柄摇杆机构再现已知运动规律的优化设计 1.设计变量的确定 决定机构尺寸的各杆长度,以及当摇杆按已知运动规律开始运动时,曲柄所处的位置角φ0 为设计变量。 [][] 1234512340T T x x x x x x l l l l ?== 考虑到机构的杆长按比例变化时,不会改变其运动规律,因此在计算时常l 1=1 , 而其他杆长按比例取为l 1 的倍数。 ()()22212430124arccos 2l l l l l l l ???++-=??+???? ()221243034arccos 2l l l l l l ψ??+--=?????? 经分析后,只有三个变量为独立的: [][] 123234T T x x x x l l l == 2.目标函数的建立 目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即 2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。 9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( ) 机械设计基础 大作业计算说明书题目:平面连杆机构设计 学院:材料学院 班号: 学号: 姓名: 日期: 2014年9月30日 哈尔滨工业大学 机械设计基础 大作业任务书 题目:平面连杆机构设计 设计原始数据及要求: () 目录 1设计题目 2设计原始数据 3设计计算说明书 3.1计算极位夹角 3.2设计制图 3.3验算最小传动角4参考文献 1 设计题目 平面连杆机构的图解法设计 2 设计原始数据 设计一曲柄摇杆机构。已知摇杆长度,摆角,摇杆的行程速比系数,要求摇杆靠近曲柄回转中心一侧的极限位置与机架间的夹角为,试用图解法设其余三杆的长度,并检验(测量或计算)机构的最小传动角。 () 3 设计计算说明书 3.1 计算极位夹角 极位夹角 代入数值 3.2 设计制图 3.2.1 在图纸上取一点作为点,从点垂直向上引出一条长为的 线段,终点为; 3.2.2 从点在左侧引出一条与夹角为的射线; 3.2.3 以点为圆心,以为半径画圆,与射线交于点; 3.2.4 分别从、两点向下引两条射线,射线与夹角为,两射 线交于点,点即为曲柄的回转中心; 3.2.5 以点为圆心以为半径画圆; 3.2.6 过点向左侧引出一条射线,射线与夹角,与圆交于点; 3.2.7 连接,并量取其长度,以为半径画圆,直线,与圆的 交点分别为,; 3.2.8 在图中量取,, 3.3 验算最小传动角 3.3.1 在处根据余弦定理 3.3.2 在处根据余弦定理 所以最小传动角 4 参考文献 [1]宋宝玉,王瑜,张锋主编.机械设计基础.哈尔滨:哈尔滨工业大学出版,2010. [2]王瑜主编.机械设计基础大作业指导书.哈尔滨:哈尔滨工业大学出版社,2014. 一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两 工程软件训练 目录 目录 (1) 第1章绪论 (3) 第2章活塞组的设计 (4) 2.1 活塞的设计 (4) 2.1.1 活塞的材料 (4) 2.1.2 活塞头部的设计 (4) 2.1.3 活塞裙部的设计 (5) 2.2 活塞销的设计 (5) 2.2.1 活塞销的结构 (5) 第3章连杆组的设计 (6) 3.1 连杆的设计 (6) 3.1.1 连杆材料的选用 (6) 3.1.2 连杆长度的确定 (6) 3.1.3 连杆小头的结构设计 (6) 3.1.4 连杆杆身的结构设计 (6) 3.1.5 连杆大头的结构设计 (6) 3.2 连杆螺栓的设计 (7) 第4章曲轴的设计 (8) 4.1 曲轴的结构型式和材料的选择 (8) 4.1.1 曲轴的结构型式 (8) 4.1.2 曲轴的材料 (8) 4.2 曲轴的主要尺寸的确定和结构细节设计 (8) 4.2.1 曲柄销的直径和长度 (8) 4.2.2 主轴颈的直径和长度 (9) 4.2.3 曲柄 (9) 4.2.4 平衡重 (9) 4.2.5 油孔的位置和尺寸 (10) 4.2.6 曲轴两端的结构 (10) 1 工程软件训练 第5章曲柄连杆机构的创建 (11) 5.1 活塞的创建 (11) 5.2 连杆的创建 (11) 5.3 曲轴的创建 (11) 第六章曲柄连杆机构静力学分析 (13) 6.1 活塞的静力分析 (13) 6.2 连杆的静力分析 (13) 2 工程软件训练 第1章绪论 曲柄连杆机构是发动机的传递运动和动力的机构,通过它把活塞的往复直线运动转变为曲轴的旋转运动而输出动力。因此,曲柄连杆机构是发动机中主要的受力部件,其工作可靠性就决定了发动机工作的可靠性。随着发动机强化指标的不断提高,机构的工作条件更加复杂。在多种周期性变化载荷的作用下,如何在设计过程中保证机构具有足够的疲劳强度和刚度及良好的动静态力学特性成为曲柄连杆机构设计的关键性问题[1]。 通过设计,确定发动机曲柄连杆机构的总体结构和零部件结构,包括必要的结构尺寸确定、运动学和动力学分析、材料的选取等,以满足实际生产的需要。 在传统的设计模式中,为了满足设计的需要须进行大量的数值计算,同时为了满足产品的使用性能,须进行强度、刚度、稳定性及可靠性等方面的设计和校核计算,同时要满足校核计算,还需要对曲柄连杆机构进行动力学分析。 为了真实全面地了解机构在实际运行工况下的力学特性,本文采用了多体动力学仿真技术,针对机构进行了实时的,高精度的动力学响应分析与计算,因此本研究所采用的高效、实时分析技术对提高分析精度,提高设计水平具有重要意义,而且可以更直观清晰地了解曲柄连杆机构在运行过程中的受力状态,便于进行精确计算,对进一步研究发动机的平衡与振动、发动机增压的改造等均有较为实用的应用价值。 本文以捷达EA113汽油机的相关参数作为参考,对四缸汽油机的曲柄连杆机构的主要零部件进行了结构设计计算,并对曲柄连杆机构进行了有关运动学和动力学的理论分析与计算机仿真分析。 3 平面连杆机构习题及 答案 平面连杆机构 一、填空: 1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。 2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。 3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。 4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短 杆与最长杆长度之和小于或等于其它两杆长度之和。(用文字说明) 5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。试用式子表明它构成曲柄摇杆机构的条件: (1)__a+b≤c+d_____。 (2)以__b或d__为机架,则__a__为曲柄。 图1-1 6.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得曲柄摇杆机构。 7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。 8. 当机构有极位夹角θ时,则机构有急回特性。 9.机构中传动角γ和压力角α之和等于90°。 10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。 二、选择题: 1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位 置。 A.连杆 B.机架 C.摇杆 D.曲柄 2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。 A.有曲柄存在 B.不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对 3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。 A. K<1 B. K=1 C. K>1 D. K=0 4.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。 A.θ<0 B.θ=0 C. θ≦0 D. θ﹥0 5.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。 A.按原运动方向 B.反方向 C.不确定的 D. 以上答案均不对 6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。 A. 曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 7.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做 B.双曲柄机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对 8.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆 的长度之和,最短杆为连杆,这个机构叫做 C.双摇杆机构。 A.曲柄摇杆机构 B.双曲柄机构 C.双摇杆机构 D. 以上答案均不对matlab(四连杆优化设计)
平面连杆机构及其设计答案复习进程
平面连杆机构习题及答案.docx
平面连杆机构综合编程作业
插床导杆机构课程设计
平面连杆机构优化设计
平面连杆机构习题及标准答案
曲柄连杆机构运动学仿真
平面连杆机构基础习题及答案
机械原理大作业1连杆机构27题
机械原理课程设计连杆机构B完美版
平面连杆机构的优化设计教案
平面机构的运动分析习题和答案
哈工大机械设计大作业平面连杆机构设计说明书
平面连杆机构及其设计(参考答案)
曲柄连杆机构课程设计
平面连杆机构习题及答案知识讲解