无刷直流伺服电机与交流伺服电机的对比
AC vs DC Brushless Servo Motor
By John Mazurkiewicz,
Baldor Electric
Brushless motors are similar to AC motors since a moving magnet field causes rotor movement. Brushless motors are also similar to PM DC motors since they have predicable linear characteristics.
Is this why the brushless is sometimes called AC brushless and sometimes called DC brushless? It is the method of driving or powering the motor from which the name AC or DC is derived. The method of driving the motor will result in different effects (i.e. different torque delivered even from the same motor!).
Torque developed
Torque developed by a brushless motor depends on the control technology used. A simplified way to determine the type of control is to look at the feedback scheme. DC uses Hall sensors for feedback, whereas AC uses resolver or encoder for feedback. Each of these control methods has its strong points and advantages, which have to be reviewed to determine which is best for an application.
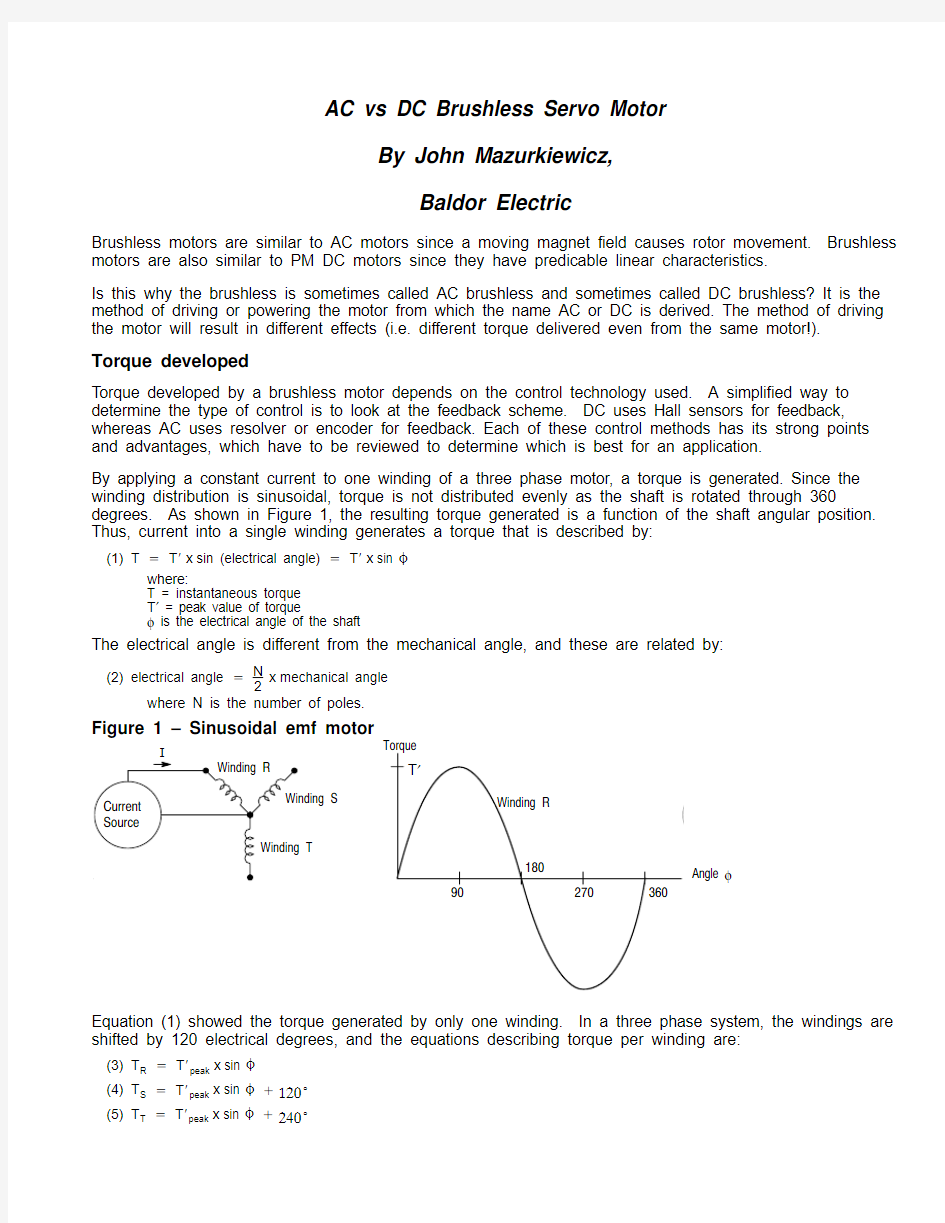
By applying a constant current to one winding of a three phase motor, a torque is generated. Since the winding distribution is sinusoidal, torque is not distributed evenly as the shaft is rotated through 360 degrees. As shown in Figure 1, the resulting torque generated is a function of the shaft angular position. Thus, current into a single winding generates a torque that is described by:
(1)T+T?x sin (electrical angle)+T?x sin f
where:
T = instantaneous torque
T′ = peak value of torque
φ is the electrical angle of the shaft
The electrical angle is different from the mechanical angle, and these are related by:
x mechanical angle
(2)electrical angle+N
2
where N is the number of poles.
Figure 1 – Sinusoidal emf motor
Angle φ
Equation (1) showed the torque generated by only one winding. In a three phase system, the windings are shifted by 120 electrical degrees, and the equations describing torque per winding are:
+T?peak x sin f
(3)T
R
+T?peak x sin f)120°
(4)T
S
+T?peak x sin f)240°
(5)T
T
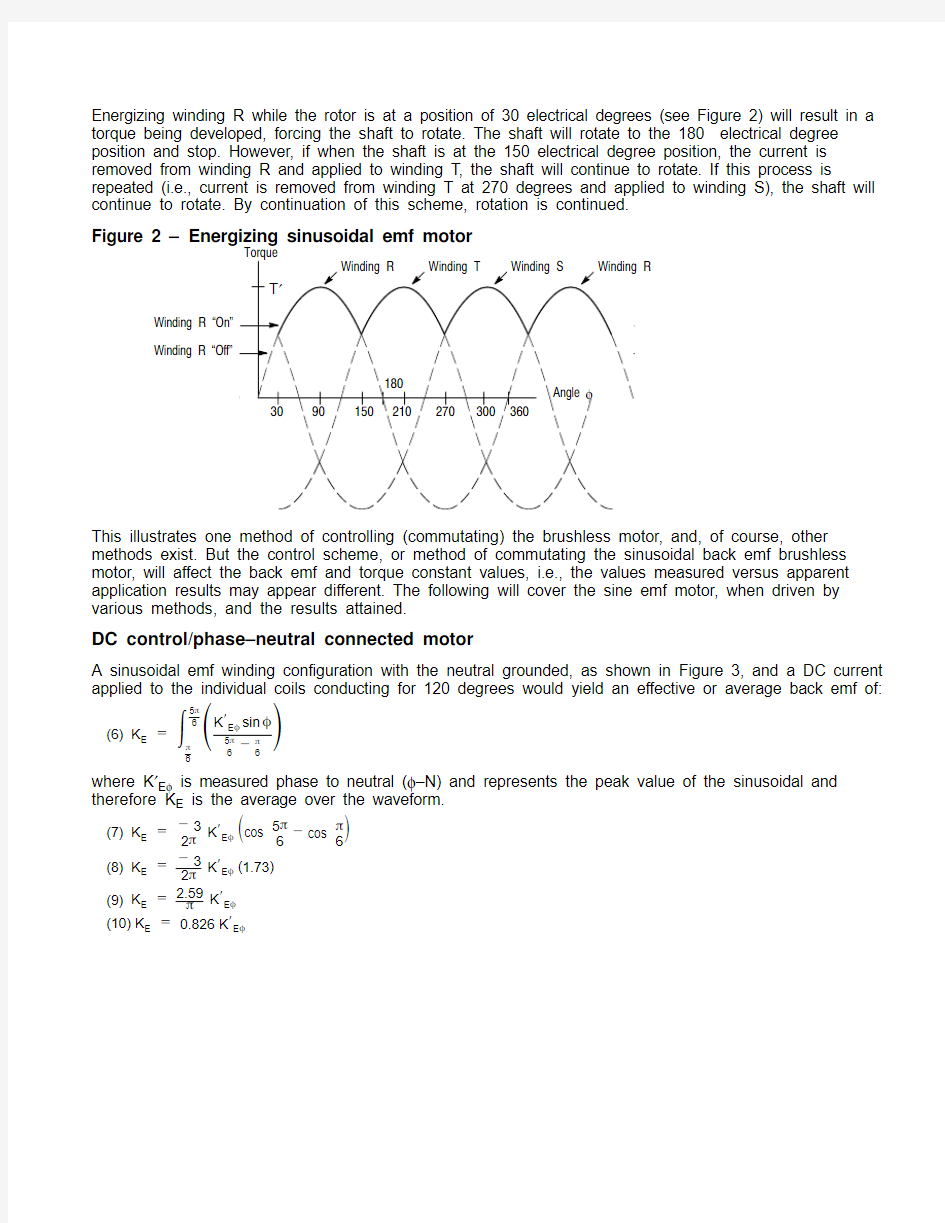
Energizing winding R while the rotor is at a position of 30 electrical degrees (see Figure 2) will result in a torque being developed, forcing the shaft to rotate. The shaft will rotate to the 180 electrical degree position and stop. However, if when the shaft is at the 150 electrical degree position, the current is removed from winding R and applied to winding T, the shaft will continue to rotate. If this process is repeated (i.e., current is removed from winding T at 270 degrees and applied to winding S), the shaft will continue to rotate. By continuation of this scheme, rotation is continued.
Figure 2 – Energizing sinusoidal emf motor
Winding R On"
Winding R Off"
This illustrates one method of controlling (commutating) the brushless motor, and, of course, other methods exist. But the control scheme, or method of commutating the sinusoidal back emf brushless motor, will affect the back emf and torque constant values, i.e., the values measured versus apparent application results may appear different. The following will cover the sine emf motor, when driven by various methods, and the results attained.
DC control/phase–neutral connected motor
A sinusoidal emf winding configuration with the neutral grounded, as shown in Figure 3, and a DC current applied to the individual coils conducting for 120 degrees would yield an effective or average back emf of:
(6)K
E +?5p6p6
ǒK?E f sin f5p
*p
ǔ
where K′Eφ is measured phase to neutral (φ–N) and represents the peak value of the sinusoidal and therefore K E is the average over the waveform.
(7)K
E
+*3K?E fǒcos 5p*cos pǔ
(8)K
E +*3
2p
K?
E f
(1.73)
(9)K
E
+ 2.59p K?E f
(10)K
E
+0.826K?E f
Figure 3 – Applying a DC current to a sinusoidal emf motor
φ
K ′E φ
The relationship between voltage constant and torque constant are related through:
(11)Metric K T f +K E f (N –m/Amps, v/r/s)
v/r/s = volts/radians/second
(12)English K T f +1.35K E f (oz –in/Amp, V/kRPM)
V/kRPM = volts/1000 revolutions/minute
Thus the expression for torque becomes:
(13)T +K T I
(14)Metric T +0.826K ?E f I (torque in N –m, K E f in v/r/s)
or
(15)English T + 1.35K E f I (16)T + 1.35x 0.826K ?E f I
(17)T + 1.11K ?E f I (torque in oz –in,K E in V/kRPM)
Keep in mind that K E is easy to measure and verify, whereas the torque constant is more difficult to
measure. The back emf or voltage constant is measured on a phase to neutral basis, and current is the DC level when the winding is “On ”.
With the commutation scheme as explained above, the torque will fluctuate between a high point and a low point, thus giving rise to torque ripple. Figure 4 reveals that the minimum amount of torque will be:
(18)T min +T ?x sin (30) = 0.5T ’
The maximum torque is:
(19)T max +T ?x sin (90) = T ?
The torque ripple percent is:
(20)%+Max
*Min Max
+ 1 – 0.5
1+50%
Note that the control should be designed to reduce this torque ripple to an acceptable level for the given
application.
Figure 4 – Torque ripple from the motor shown in Figure 2
φ
DC control/phase–phase connected motor
In the above discussion, only current in one winding was allowed. If positive and negative currents are applied (that is, applying power across two motor windings), a different picture emerges. As can be seen in Figure 5, with winding R energized (in the 30 electrical degree position), a positive torque is developed. If at the same time a negative current of equal magnitude is applied to winding T, then a positive torque is also developed. The sum of these two torques will be:
)(*T T)
(21)T+T
R
(22)T+T? sin f*T? sin (f+ 240°)
(23)T+T? x 0.5 – T’ (–1.0)
(24)T+T? x 1.5
Figure 5 – Energizing a sinusoidal emf motor to produce torque
Angle φ
This shows that the torque developed by energizing two windings simultaneously is 50% greater than energizing only one winding. This torque results in shaft rotation, and when the shaft reaches the 90 electrical degrees position, current is removed from winding T and applied to winding S (negative current). Again positive torque is developed and rotation continues. An illustration of timing involved when switching (or commutation) from winding to winding is shown in the timing diagram of Figure 6. Since there are six different commutation sections for 360 degrees of rotation, this commutation scheme is referred to as
six–step, or DC brushless, control.
Figure 6 – Applying a DC current to two windings of a sinusoidal emf motor
S
Solid lines indicate when the windings are energized.
This commutation scheme, i.e., a sinusoidal emf with floating neutral, and the DC control as shown in Figure 7 could have the winding conducting for 60 degrees. This yields an average back emf of:
(25)K E +
?
2p 3
p 3
ǒ
K ?E ff sin f
2p 3
*p
3
ǔ
where K ′E is measured phase to phase (φ–φ) and represents the peak value of the sinusoidal, and K E is therefore the average over the waveform.
(26)K E +*3p K ?E ff ǒ
cos 2p 3*cos p 3ǔ
(27)K E +*3p K ?E ff
(28)K E +0.955K ?E ff
Figure 7 – Applying a DC current to two windings
φ
E = 0.955 K ′E
Equations (11) and (12) state the relationship between voltage constant and torque constant. Thus, the expression for torque, with a floating neutral, becomes:
(29)T+K
T
I
(30)Metric T+0.955K?
E ff I(torque in N–m, K
E
in vńrńs)
or
(31)English T+ 1.35K
E ff
I
(32)T+ 1.35x0.955K?
E ff
I
(33)T+ 1.289K?
E ff I(torque in oz–in, K
E
in VńkRPM)
The back emf or voltage constant is measured on a phase to phase basis, and current is the DC level through the winding, i.e., the DC level when the winding is “On.” Note that Equations (13) through (17) cannot be directly compared to Equations (29) through (33) due to the different “average” values of energized windings, i.e., measuring and energizing phase neutral vs. phase phase.
With the commutation scheme above, the maximum torque developed occurs at 60 degrees and is:
(34)T max+T?(sin(60) – sin (300))
(35)T max+T?x1.73
The maximum torque is:
(36)T
min
+T?x1.5
The torque ripple percent is:
(37)%+Max*Min
Max + 1.73*1.5
1.73
+13.2%
This represents lower ripple than the situation presented by Equation (20), but comes with the addition of bidirectional current flow. Torque ripple depends on the control scheme. Again the control must be designed to reduce ripple to acceptable application tolerances.
AC control/sine motor
Suppose that the application of a current whose amplitude is a function of angular position, Equation (38), is applied simultaneously to all three windings (see Figure 8). Since there are feedback devices to generated sinusoidal position information, this approach is possible. When using this approach, the control is often referred to as a sine controller. When energizing all three windings, the output torque developed by the brushless motor is then equal to the sum of the torques in all three phases:
(38)I+I?x(sin f)f phase)
(39)T
M +T R)T
S
)T T
The individual phase torques are:
(40)T
R
+K T(R)I?(sin f)
(41)T
S
+K T(S)I?(sin f))120°
(42)T
T
+K T(T)I?(sin f))240°
Figure 8 – Driving the sinusoidal emf motor with sinusoidal current
simultaneously through three windings.
K ′E
K E φφ RMS = 0.707 K ′E φφ
I ′
Angle φ
Angle φ
Note that since the windings are also sinusoidal, previously explained, the individual torque constants are:
(43)K T (R)+K ?T f (sin f )(41)K T (S)+K ?T f (sin f ))
120°
(42)K T (T)+K ?T f (sin f ))240°
where peak values for windings R, S, and T are equal and K ′TO is the phase to neutral value. Thus,combining Equations (40), (41), and (42) with Equations (43), (44), and (45) results in:
(46)??T R ?+?K ?T f ?sin?(f )?x?I ?sin f
(47)??T S ?+?K ?T f ?sin?(f )120°)?x?I ?sin?(f )120°)(48)??T T ?+?K ?T f ?sin?(f )240°)?x?I ?sin?(f )240°)
Using these equations with substitutions into Equation (39), we arrive at:
(49)??T M ?+?K ?T f ?I ?[sin 2f )sin 2(f )120°))sin 2(f )240°)]
An important note to remember here is K ′T φ is the peak value of the phase to neutral torque constant and I ′is the peak value of the sinusoidal current (not the RMS). Equation (49) can be reduced to:
(50)??T M ?+?K ?T f ?I ??x?1.5
With this commutation scheme, there is no difference between the maximum and minimum torque developed. Therefore, there is no torque ripple (ideal) when employing a sine controller with a sine emf motor. Equation (50) provides an expression for torque developed in terms of torque constant as measured from phase to neutral. However, with most motors the neutral is not accessible. Therefore, an equivalent phase to phase expression is desired. The equation is developed as follows:
(51)??K T f?x?2?+?K T ff
(52)??I??+?I RMS .707
(53)??K?T?+?K T?RMS .707
These can be substituted into Equation (50), with the result:
(54)??T?+?ǒ1.5?K?T ff2ǔ?x?ǒI RMS.707?ǔ?+?1.0608K?T ff?I RMS
(55)??T?+?ǒ1.0608?K T ff?RMS
.707
ǔ?x?ǒI RMSǔ
(56)??T?+?ǒ1.5?K T ff?RMSǔ?x?ǒI RMSǔ
This equation provides a relationship between torque developed, the RMS current (which can be measured), and the phase to phase torque constant of the motor. However, K T cannot be easily measured. The saving factor is the K E on a phase to phase basis is very easy to measure. Simply by observing the motor’s back emf waveform on a scope (when driving the motor by some external means) and measuring that waveform, the value for K E can be determined. K E is simply volts divided by kRPM. Then, by using the appropriate conversion factor to convert from K E to K T, Equation (56) may be used.
K E and K T Relationship
The relationship between the torque constant and voltage constant can most easily be derived by analyzing the system using the metric approach. The phase to neutral analysis provides:
(57)K
T f
+K E f
where K T is in N–m/amp and K E is v/r/s.
Since in a three phase Wye connected system:
(58)2x K
T f
+K T ff
(59)3?x K E f+K E ff
Therefore:
(60)K
T ff +2
3
?K E ff
(61)K
T ff
+1.15473K E ff
(N*mńamp)(vńrńs)
This is the basic equation (in metric) for the relationship of torque constant versus voltage constant for a three phase motor when driven with a three phase excitation. From this the other dimension systems can be derived:
(62)K
T ff
+11.039x10*3K E ff
(N*mńamp)(vńrńs)
(63)K
T ff
+97.698x10*3K E ff
(lb*inńamp)(VńKRPM)
(64)K
T ff
+1.563K E ff
(oz*inńamp)(VńKRPM)
Substituting Equation (60) into Equation (56) provides:
(65)T+ 1.52
3?K
E ff RMS
I
RMS
(66)T+3?K E ff RMS I RMS(with K E in vńrńs) or:
(67)T+K
T ff RMS I RMS
with:
(68)K
T ff RMS +3?K
E ff RMS
(N–m/amp)(vńrńs)
This provides the relationship between torque developed, the RMS current, and the measurable voltage constant of the motor. Note that current and voltage constant are expressed in RMS terms, i.e., RMS of a sinusoidal waveform. By simply measuring the motor’s peak value of K E, using a scope, the developed torque may now be easily calculated.
Table 1 summarizes the relationship of a sinusoidal emf motor when driven with either a DC drive or an AC drive. By multiplying the peak value of the sine back emf times the factor in the table, the equivalent, or RMS, value is determined. This RMS value can then be used in calculations, and the sine emf motor is treated as an ordinary PMDC motor.
Table 1
Table 2 shows and example calculation for the RMS values for a motor driven as a generator at 1,000 RPM with back emf (peak value) measured as 75 V/kRPM peak phase to phase.
If the example load were 400 oz–in (2.82 N–m) and the motor were powered by a six–step control (vs. a sine control) the currents would be 4.1 Amps instead of 3.2 Amps respectively.
Table 2
交流伺服电动机的原理及三种转速控制方式
交流伺服电动机的原理及三种转速控制方式 交流伺服电机的定子装有三相对称的绕组,而转子是永久磁极。当定子的绕组中通过三相电源后,定子与转子之间必然产生一个旋转场。这个旋转磁场的转速称为同步转速。电机的转速也就是磁场的转速。由于转子有磁极,所以在极低频率下也能旋转运行。所以它比异步电机的调速范围更宽。而与直流伺服电机相比,它没有机械换向器,特别是它没有了碳刷,完全排除了换向时产生火花对机槭造成的磨损,另外交流伺服电机自带一个编码器。可以随时将电机运行的情况“报告”给驱动器,驱动器又根据得到的11报告"更精确的控制电机的运行。 由此可见交流伺服电机优点确实很多。可是技术含量也高了,价格也高了。最重要是对交流伺服电机的调试技术提高了。也就是电机虽好,如果调试不好一样是问题多多。伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与H标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 伺服电动机(或称执行电动机)是自动控制系统和计算装置中广泛应用的一种执行元件。其作用为把接受的电信号转换为电动机转轴的角位移或角速度,按电流种类的不同,伺服电动机可分为直流和交流两大类。下面简单介绍交流伺服电动机有以下三种转速控制方式: (1)幅值控制控制电流与励磁电流的相位差保持90°不变,改变控制电压的大小。 (2)相位控制控制电压与励磁电压的大小,保持额定值不变,改变控制电压的相位。 (3)幅值一相位控制同时改变控制电压幅值和相位.交流伺服电动机转轴的转向随控制电压相位的反相而改变。
直流(DC)与交流(AC)伺服电机及驱动
目录 直流(DC与交流(AC伺服电机及驱动 (1 1.直流(DC伺服电机及其驱动 (1 (1直流伺服电机的特性及选用 (1 (2直流伺服电机与驱动 (2 (3PWM直流调速驱动系统原理 (3 2.交流(AC伺服电机及其驱动 (4 直流(DC与交流(AC伺服电机及驱动 1.直流(DC伺服电机及其驱动 (1直流伺服电机的特性及选用 直流伺服电机通过电刷和换向器产生的整流作用,使磁场磁动势和电枢电流磁动势正交,从而产生转矩。其电枢大多为永久磁铁。 直流伺服电机具有较高的响应速度、精度和频率,优良的控制特性等优点。但由于使用电刷和换向器,故寿命较低,需要定期维修。 20世纪60年代研制出了小惯量直流伺服电机,其电枢无槽,绕组直接粘接固定在电枢铁心上,因而转动惯量小、反应灵敏、动态特性好,适用于高速且负载惯量较小的场合,否则需根据其具体的惯量比设置精密齿轮副才能与负载惯量匹配,增加了成本。 直流印刷电枢电动机是一种盘形伺服电机,电枢由导电板的切口成形,导体的线圈端部起换向器作用,这种空心式高性能伺服电机大多用于工业机器人、小型NC 机床及线切割机床上。
宽调速直流伺服电机的结构特点是励磁便于调整,易于安排补偿绕组和换向极,电动机的换向性能得到改善,成本低,可以在较宽的速度范围内得到恒转速特性。永久磁铁的宽调速直流伺服电机的结构如下图所示。有不带制动器a和带制动器b两种结构。 电动机定子(磁钢1采用矫顽力高、不易去磁的永磁材料(如铁氧体永久磁铁、转子(电枢2直径大并且有槽,因而热容量大,结构上又采用了通常凸极式和隐极式永磁电动机磁路的组合,提高了电动机气隙磁通密度。同时,在电动机尾部装有高精密低纹波的测速发电机,并可加装光电编码器或旋转变压器及制动器,为速度环提供了较高的增量,能获得优良的低速刚度和动态性能。 日本发那科(FANUC公司生产的用于工业机器人、CNC机床、加工中心(MC 的L系列(低惯量系列、M系列(中惯量系列和H系列(大惯量系列直流伺服电机。其中L系列适合于频繁启动、制动场合应用,M系列是在H系列的基础上发展起来的,其惯量较H系列小,适合于晶体管脉宽调制(PWM驱动,因而提高了整个伺服系统的频率响应。而H系列是大惯量控制用电动机,它有较大的输出功率,采用六相全波
伺服电机原理及选型.
什么是伺服电机? 伺服电机:是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器。作为液压阀控制器的伺服电机,属于功率很小的微特电机,以永磁式直流伺服电机和并激式直流伺服电机最为常用。 伺服电机的作用:伺服电机可使控制速度,位置精度非常准确。 伺服电机的分类:直流伺服电机和交流伺服电机。 直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。具有起动转矩大,调速范围宽,机械特性和调节特性的线性度好,控制方便等优点,但换向电刷的磨损和易产生火花会影响其使用寿命。近年来出现的无刷直流伺服电机避免了电刷摩擦和换向干扰,因此灵敏度高,死区小,噪声低,寿命长,对周围电子设备干扰小。 直流伺服电机的输出转速/输入电压的传递函数可近似视为一阶迟后环节,其机电时间常数一般大约在十几毫秒到几十毫秒之间。而某些低惯量直流伺服电机(如空心杯转子型、印刷绕组型、无槽型的时间常数仅为几毫秒到二十毫秒。 小功率规格的直流伺服电机的额定转速在3000r/min以上,甚至大于 10000r/min。因此作为液压阀的控制器需配用高速比的减速器。而直流力矩伺服电机(即低速直流伺服电机可在几十转/分的低速下,甚至在长期堵转的条件下工作,故可直接驱动被控件而不需减速 直流伺服电机分为有刷和无刷电机。 有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷,产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。 交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。 交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数。 交流伺服电机和无刷直流伺服电机在功能上有什么区别? 交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。
MSDA043A1A交流伺服电机驱动器简介
附录三MSDA043A1A 交流伺服电机驱动器简介1.外部结构和主要接线插座 MSDA043A1A 交流伺服电机驱动器外部结构如图1所示。 图1 MSDA043A1A 交流伺服电机驱动器外部结构1)CN SER/CN NET:变频器与计算机或其它控制器连接接口; 2)CN SIG:编码器连接接口; 3)CN 1/F:各种控制信号输入/输出接口。
2. CN 1/F接口常用控制信号接线端子的功能。 CN 1/F接口常用控制信号接线端子的功能如表1所示 表1 : 常用控制信号接线端子的功能 端子号符号信号名称功能 7COM+外接电压正 输入给变频器提供直流24V或12V工作电压 41COM-外接电压负 输入 29SRV-ON伺服使能输 入此端与COM-接通后,变频器允许工作 8CWL正向脉冲禁 止输入当此端与COM-断开时,正向脉冲输出信号被禁止 9CCWL反向脉冲禁 止输入当此端与COM-断开时,反向脉冲输出信号被禁止 3PULS1指令脉冲输 入1)当使用双脉冲输出方式时,PULS为正脉冲输出端,而 SIGN为负脉冲输出端;2)当使用单脉冲输出方式时,PULS为脉冲输出端,而 SIGN为方向输出端。 4PULS2 5SIGN1指令符号输 入 6SIGN2 37ALM+伺服故障输 出端当控制器出现故障时,此输出断开。 36ALM- 35S-RDY+伺服准备好当主电源接通且没有故障时,此 输出端接通。 34S-RDY- 31A-CLR故障复位当此端与COM-接通时,故障被 清除。
3.前面板 可以利用前面板作监视器、参数设定、EEPROM写入器、自动增益调整和其它辅助功能。MSDA043A1A 交流伺服电机驱动器操作面板如图2所示。 图2 操作板结构 操作面板各部分的功能如表2所示。
交流伺服电机与运动控制卡的接口实验
交流伺服电机与运动控制卡的接口实验 一、实验目的 1.认知富士交流伺服电机及驱动器的硬件接口电路 2.认知MPC2810运动控制卡的硬件接口 3.掌握驱动器与MPC2810运动控制卡的硬件连接 二、实验器材 MPC2810运动控制卡、富士交流伺服电机及驱动器,数控实验台II,若干导线,万用表 三、实验内容及步骤 有关富士交流伺服电机及驱动器的详细信息参见《富士AC 伺服系统FALDIC-W 系列用户手册》,有关MPC2810运动控制卡的详细信息参见《MPC2810运动控制器用户手册》。 一)、MPC2810运动控制器相关简介 MPC2810运动控制器是乐创自动化技术有限公司自主研发生产的基于PC的运动控制器,单张卡可控制4轴的步进电机或数字式伺服电机。通过多卡共用可支持多于4轴的运动控制系统的开发。 MPC2810运动控制器以IBM-PC及其兼容机为主机,基于PCI总线的步进电机或数字式伺服电机的上位控制单元。它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控等等);运动控制器完成运动控制的所有细节(包括直线和圆弧插补、脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。 MPC2810运动控制器配备了功能强大、内容丰富的Windows动态链接库,可方便地开发出各种运动控制系统。对当前流行的编程开发工具,如Visual Basic6.0,Visual C++6.0提供了开发用Lib库及头文件和模块声名文件,可方便地链接动态链接库,其他32位Windows开发工具如Delphi、C++Builder等也很容易使用MPC2810函数库。另外,支持标准Windows动态链接库调用的组态软件也可以使用MPC2810运动控制器。 MPC2810运动控制器广泛适用于:激光加工设备;数控机床、加工中心、机器人等;X-Y-Z控制台;绘图仪、雕刻机、印刷机械;送料装置、云台;打标机、绕线机;医疗设备;包装机械、纺织机
直流无刷伺服及直流无刷电机接线图参考资料
晶貌智能电机参考资料: 直流无刷、伺服电机特点:体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命。可用于智能移动设备、高灵敏度仪器、高速运转设备等,我们电机能很好地满足其技术要求。 直流无刷电机:通过霍尔反馈控制,主要以速度控制为主对于精度要求及功能性要求不是很高的AGV小车等。控制相对简单。(一般的无刷电机,是根据三个霍尔产生的六组编码,比如001,101这些去判断转子旋转位置,然后控制绕组的电流换相,主要是作为一种动力输出,不需要十分精确地控制旋转角度,此时用霍尔元件就足够了,如两点之间普通搬运的小车)。 直流无刷伺服电机(配有编码器):通过编码器反馈控制,可实现速度和位置的精确控制需要准确定位及附带需求功能较多的AGV适用,目前新研发小车配套伺服趋势较明显。(对于伺服电机而言,是要精确控制转动角度的,此时就要根据需要选择不同分辨率的编码器作为位置反馈信号,最常见的就是2500线增量编码器,相当于电机转动一圈可以发出10000个脉冲信号,所以可以达到非常精确的控制精度。相对的,编码器的价格和霍尔不是一个数量级的,这里面当然也有性价比的问题)。 伺服电机在封闭的环里面使用。也就是说它随时把信号传给系统,同时把系统给出的信号来修正自己的运转。直流无刷伺服电机特点:1、转动惯量小、启动电压低、空载电流小;2、其接触式换向系统,大大提高电机转速;3、无刷伺服电机在执行伺服控制时,通过编码器可实现速度、位置、扭矩等的精确控制;4、不存在电刷磨损情况,除转速高之外,还具有寿命长、噪音低、无电磁干扰等特点。无刷伺服电机和其他电机相比到底有什么优点:1、精度①实现了位置,速度和力矩的闭环控制;②克服了其他电机失步的问题; 2、转速高速性能好,一般额定转速能达到3000~5000转; 3、适应性抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动和要求快速起动的场合特别适用; 4、稳定①低速运行平稳,能做到低速运行时的精确控制;②适用于有高速响应要求的场合; 5、及时性电机加减速的动态相应时间短,一般在几十毫秒之内; 6、舒适性①发热和噪音明显降低。②普通的电机,断电后它还会因为自身的惯性再转一会儿,然后停下。而伺服电机是说停就停,说走就走,反应极快。 无刷直流伺服电机这里有3个名词 1无刷 2直流 3伺服,分别代表电机的3个属性。 1无刷代表没有电刷,电刷用于直流电机启动是一易损件。无刷就是用驱动电路代替了电刷启动电机。 2直流电机就是指采用直流电源,他的难道就在于电机启动(由于直流电产生的磁场是恒定的),启动就需要电刷或者代替电刷的电路。 3伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。 直流无刷电机典型接线图参考(霍尔反馈):
交流伺服电机的工作原理
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 4. 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降, 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行,分别称为摪胧 只瘮或摶旌鲜綌、撊只瘮的永磁交流伺服系统。 到目前为止,高性能的电伺服系统大多采用永磁同步型交流伺服电动机,控制驱动器多采用快速、准确定位的全数字位置伺服系统。典型生产厂家如德国西门子、美国科尔摩根和日本松下及安川等公司。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000 r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦波驱动、80C、154CPU和门阵列芯片控制,力矩波动由24%降低到7%,并提高了可靠性。这样,只用了几年时间形成了八个系列(功率范围为0.05~6kW)较完整的体系,满足
无刷直流电机的
无刷直流电机的工作原理
无刷直流电机原理 无刷直流电动机的工作原理 普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。 无刷直流电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。● 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。无刷直流电动机的原理简图如图一所示:
主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ 调制波的对称交变矩形波。永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组建处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电度角,转子跟随定子磁场转动相当于60°电度角空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电度角,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 ● 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。电动机的转矩正比于绕组平均电流;TM=Ktlav(N?M)电动机两相组反电势的差比于电动机的角速度;ELL=Keω(V)所以电动机绕组中的平均电流为:Iav=(Vm-ELL)/2Ra(A)其中,Vm=δ?VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩:Tm=δ?(VDC?Kt/2Ra)-Kt?(Keω/2Ra)Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励支流电动机电枢电压控制相同的控制特性和机械特性。无刷直流电动机的转速设定,取决于速度指令Vc的高低,如果速度指令最大值为+5V对应的最高转速:Vc(max)ón max,那么,+5V以下任何电平即对应相当的转速n,这就实现了变速设定。当Vc设定以后,无论是负载变化、
交流伺服电机选型重点学习的手册范本.doc
ST 系列交流伺服电机型号编号说明 1:表示电机外径 , 单位 :mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位: rpm。 6:表示电机适配的驱动器工作电压,L— AC220V, H— AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T ), R— 1 对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示 IPM 模块的额定电流( 15/20/30/50/75A ) 3:表示功能代码( M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机ST系列电机ST 系列电机主要参数 适配驱动器 额定功率 电机型号额定转矩额定转速外形尺寸零售价 ( 元 ) 110ST-M02030 2 Nm 3000rpm 110×110×158 1500 110ST-M04030 4 Nm 3000rpm 110×110×185 1700 110ST-M05030 5 Nm 3000rpm 110×110×2001800 110ST-M06020 6 Nm 2000rpm SD15M 110×110×217 1900 SD20MN 110ST-M06030 6 Nm 3000rpm SD30MN 110×110×217 1900 SD50MN 130ST-M04025 4 Nm 2500rpm SD75MN 130×130×163 1800 130ST-M05025 5 Nm 2500rpm 130×130×171 2100 130ST-M06025 6 Nm 2500rpm 130×130×181 2400 130ST-M07720Nm2000rpm130×130×1952900
伺服电机知识汇总(直流-交流伺服电机)
伺服电机知识汇总(直流/交流伺服电机) 伺服电机servomotor “伺服”一词源于希腊语“奴隶”的意思。“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动;当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。 伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。 伺服电机分为交流伺服和直流伺服两大类 交流伺服电机的基本构造与交流感应电动机(异步电机)相似。在定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组WcoWf,接恒定交流电压,利用施加到Wc上的交流电压或相位的变化,达到控制电机运行的目的。交流伺服电机具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格(要求分别小于10%~15%和小于15%~25%)等特点。 直流伺服电机基本构造与一般直流电动机相似。电机转速n=E/K1j=(Ua-IaRa)/K1j,式中E 为电枢反电动势,K为常数,j为每极磁通,Ua、Ia为电枢电压和电枢电流,Ra为电枢电阻,改变Ua或改变φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法,在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通φ恒定。直流伺服电动机具有良好的线性调节特性及快速的时间响应。 直流伺服电机的优点和缺点 优点:速度控制精确,转矩速度特性很硬,控制原理简单,使用方便,价格便宜。 缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(无尘易爆环境不宜) 交流伺服电机的优点和缺点 优点:速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,90%以上的高效率,发热少,高速控制,高精确度位置控制(取决于编码器精度),额定运行区域内,可
实验1 交流伺服电机控制实验
实验一交流伺服电机控制实验 一、实验目的和要求 1、熟悉三菱伺服驱动器的接线及伺服电机的驱动控制方法; 2、熟悉AMPCI数据采集卡的使用方法; 3、提升计算机编程能力; 4、熟悉计算机键盘按键控制外部设备的方法; 5、学习微秒级延时方法; 二、实验设备与材料准备 1、AMPCI9102数据采集卡及相关配件; 2、PC机及外围配件; 3、三菱伺服驱动雕铣工作台; 4、导线若干; 三、实验原理及步骤 1、实验基本原理 通过VB编程控制AMPCI9102数据采集卡向伺服驱动器输出方向电平和脉冲信号,从而控制伺服电机的转向。 举例:欲让X轴电机正转一个脉冲,我们只要先向X轴电机发一个方向电平,现假定高电平1为反转,那么正转就应该发低电平0;然后发一个脉冲即可实现。若需电机连续转动,则应在脉冲间安插一个延时,建议50毫秒左右。 AMPCI9102数据采集卡相关命令: 1)打开AMPCI设备: 函数:void _stdcall AM9102_Open(HANDLE *phPLX9052, WORD nCardNum) 功能:打开AMPCI-9102卡 入口有效参数:nCardNum = 0,1,2,3... 出口返回值: 1 打开设备成功 0 打开设备失败 2)16BIT开关量输出 函数:void _stdcall AM9102_D0(HANDLE hPLX9052, WORD date)
功能:输出16BIT数字量 入口有效参数:date-输出数值, 取值范围0000-FFFF 出口返回值: 无 3)16BIT开关量输入: 函数:WORD _stdcall AM9102_DI(HANDLE hPLX9052) 功能:读入16BIT数字量输入状态 入口有效参数:无 出口返回值: DI-输出数值范围0000-FFFF 4)关闭AMPCI设备: 函数:void _stdcall AM9102_Close(HANDLE hPLX9052) 功能:关闭某一AMPCI9102卡 入口有效参数:无 出口返回参数:无 2、实验步骤 1)读懂AMPCI9102数据采集卡的数字量输入/输出插座各引脚定义 NC 40 ⊙⊙ 39 NC NC 38 ⊙⊙ 37 NC 19 37 GND 36 ⊙⊙ 35 GND 18 36 +5V 34 ⊙⊙ 33 +5V 17 35 B07 32 ⊙⊙ 31 B06 16 34 B05 30 ⊙⊙ 29 B04 15 33 B03 28 ⊙⊙ 27 B02 14 32 B01 26 ⊙⊙ 25 B00 13 31 B08 24 ⊙⊙ 23 B09 12 30 B10 22 ⊙⊙ 21 B11 11 29 B12 20 ⊙⊙ 19 B13 10 28 B14 18 ⊙⊙ 17 B15 9 27 AO7 16 ⊙⊙ 15 AO6 8 26 AO5 14 ⊙⊙ 13 AO4 7 25 AO3 12 ⊙⊙ 11 AO2 6 24 AO1 10 ⊙⊙ 9 AO0 5 23 AO8 8 ⊙⊙ 7 AO9 4 22 A10 6 ⊙⊙ 5 A11 3 21 A12 4 ⊙⊙ 3 A13 2 20 A14 2 ⊙□ 1 A15 1 2)接线 5 ——X电机脉冲信号 24——X电机方向电平
交流伺服电机内部结构图及原理
一、交流伺服电机结构图 二、原理
交流伺服电机在定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无"自转"现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大, 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 2、运行范围较广. 3、无自转现象)
伺服电机和伺服驱动器的使用介绍
伺服电机和伺服驱动器的使用介绍 一、伺服电机? 伺服驱动器的控制原理 伺服电机和伺服驱动器是一个有机的整体,伺服电动机的运行性能是电动机及其驱动器二者配合所反映的综合效果。 1、永磁式同步伺服电动机的基本结构 图1为一台8极的永磁式同步伺服电动机结构截面图,其定子为硅钢片叠成的铁芯和三相绕组,转子是由高矫顽力稀土磁性材料(例如钕铁錋)制成的磁极。为了检测转子磁极的位置,在电动机非负载端的端盖外面还安装上光电编码器。驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 图1 永磁式同步伺服电动机的结构 图2 所示为一个两极的永磁式同步电机工作示意图,当定子绕组通上交流电源后,就产生一旋转磁场,在图中以一对旋转磁极N、S表示。当定子磁场以同步速n1逆时针方向旋转时,根据异性相吸的原理,定子旋转磁极就吸引转子磁极,带动转子一起旋转,转子的旋转速度与定子磁场的旋转速度(同步转速n1)相等。当电机转子上的负载转矩增大时,定、转子磁极轴线间的夹角θ就相应增大,导致穿过各定子绕组平面法线方向的磁通量减少,定子绕组感应电动势随之减小,而使定子电流增大,直到恢复电源电压与定子绕组感应电动势的平衡。这时电磁转矩也相应增大,最后达到新的稳定状态,定、转子磁极轴线间的夹角θ称为功率角。虽然夹角θ会随负载的变化而改变,但只要负载不超过某一极限,转子就始终跟着定子旋转磁场以同步转速n1转动,即转子的转速为: (1-1)
图 2 永磁同步电动机的工作原理 电磁转矩与定子电流大小的关系并不是一个线性关系。事实上,只有定子旋转磁极对转子磁极的切向吸力才能产生带动转子旋转的电磁力矩。因此,可把定子电流所产生的磁势分解为两个方向的分量,沿着转子磁极方向的为直轴(或称d轴)分量,与转子磁极方向正交的为交轴(或称q轴)分量。显然,只有q轴分量才能产生电磁转矩。 由此可见,不能简单地通过调节定子电流来控制电磁转矩,而是要根据定、转子磁极轴线间的夹角θ确定定子电流磁势的q轴和d轴分量的方向和幅值,进而分别对q 轴分量和d轴分量加以控制,才能实现电磁转矩的控制。这种按励磁磁场方向对定子电流磁势定向再行控制的方法称为“磁场定向”的矢量控制。 2、位置控制模式下的伺服系统是一个三闭环控制系统,两个内环分别是电流环和速度环。 图 3 ? 稳态误差接近为零; ? 动态:在偏差信号作用下驱动电机加速或减速。
交流伺服电机与普通电机区别
交流伺服电机与普通电机区别 交流伺服电机与普通电机有很多区别: 1、根据电机的不同应用领域,电机的种类很多,交流伺服电机属于控制类电机。伺服的基本概念是准确、精确、快速定位。伺服电机的构造与普通电机是有区别的,带编码器反馈闭环控制,能满足快速响应和准确定位。 现在市面上流通的交流伺服电机多为永磁同步交流伺服,这种电机受工艺限制,很难做到很大的功率,十几Kw以上的同步伺服电机价格很贵,在这样的现场应用,多采用交流异步伺服电机,往往采用变频器驱动。 2、电机的材料、结构和加工工艺,交流伺服电机要远远高于变频器驱动的交流电机(一般交流电机或恒力矩、恒功率等各类变频电机)。就是说当伺服驱动器输出电流、电压、频率变化很快时,伺服电机能产生响应的动作变化,响应特性和抗过载能力远远高于变频器驱动的交流电机。当然不是说变频器输出不了变化那么快的电源信号,而是电机本身就反应不了,所以在变频器的内部算法设定时为了保护电机做了相应的过载设定。 3、交流电机一般分为同步和异步电机: (1)、交流同步电机:就是转子是由永磁材料构成,所以转动后,随着电机的定子旋转磁场的变化,转子也做响应频率的速度变化,而且转子速度=定子速度,所以称“同步”。 (2)、交流异步电机:转子由感应线圈和材料构成。转动后,定子产生旋转磁场,磁场切割定子的感应线圈,转子线圈产生感应电流,进而转子产生感应磁场,感应磁场追随定子旋转磁场的变化,但转子的磁场变化永远小于定子的变化,一旦等于就没有变化的磁场切割转子的感应线圈,转子线圈中也就没有了感应电流,转子磁场消失,转子失速又与定子产生速度差又重新获得感应电流。。。所以在交流异步电机里有个关键的参数是转差率就是转子与定子的速度差的比率。 (3)、对应交流同步和异步电机,变频器就有相应的同步变频器和异步变频器,伺服电机也有交流同步伺服和交流异步伺服。当然变频器里交流异步变频常见,伺服则交流同步伺服常见。 4、交流伺服电机与普通电机还有很多区别,可以参考一下《电机学》方面的书籍;普通电机通常功率很大,尤其是启动电流很大,伺服驱动器的电流容量不能满足要求。可从电机的尺寸就知道原因了。 关于伺服的应用。有很多方面,连一个小小的电磁调压阀,也可以算上一个伺服系统。其他伺服应用如火炮或雷达,用作随动,要求实时性好,动态响应快,超调小,精度在其次。如果是机床,则经常用作恒速,位置高精度,实时性要求不高。 首先得确定你应用在什么场合。如果用在机床上,则控制部分硬件可以设计得相对简单一些,成本也相应低些。如果用于军工,则内部固件设计时控制算法应该更灵活,比如提供位置环滤波、速度环滤波、非线性、最优化或智能化算法。当然不需要在一个硬件部分上实现。可以面向对象做成几种类型的产品。 交流伺服在加工中心、自动车床、电动注塑机、机械手、印刷机、包装机、弹簧机、三坐标测量仪、电火花加工机等等方面的设备有广阔的应用。 关于步进电机和交流伺服电机的性能有较大差别。 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统
步进电机、直流伺服电机、交流伺服电机的优缺点
交流伺服电机 优点 ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 直流伺服电机 直流伺服电机特指直流有刷伺服电机——电机成本高结构复杂,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),会产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。 直流伺服电机不包括直流无刷伺服电机——电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定,电机功率有局限做不大。容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护不存在碳刷损耗的情况,效率很高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境。 用途: 1、各类数字控制系统中的执行机构驱动。 2、需要精确控制恒定转速或需要精确控制转速变化曲线的动力驱动。 按电机惯量大小可分为: 1、小惯量直流电机——印刷电路板的自动钻孔机 2、中惯量直流电机(宽调速直流电机)——数控机床的进给系统 3、大惯量直流电机——数控机床的主轴电机 4、特种形式的低惯量直流电机 步进电机 优点
1、电机旋转的角度正比于脉冲数; 2、电机停转的时候具有最大的转矩(当绕组激磁时); 3、由于每步的精度在百分之三到百分之五,而且不会将一步的误差积累到下一步因而有较好的位置精度和运动的重复性; 4、优秀的起停和反转响应; 5、由于没有电刷,可靠性较高,因此电机的寿命仅仅取决于轴承的寿命; 6、电机的响应仅由数字输入脉冲确定,因而可以采用开环控制,这使得电机的结构可以比较简单而且控制成本; 7、仅仅将负载直接连接到电机的转轴上也可以极低速的同步旋转; 8、由于速度正比于脉冲频率,因而有比较宽的转速范围。 缺陷 1、如果控制不当容易产生共振; 2、难以运转到较高的转速; 3、难以获得较大的转矩; 4、在体积重量方面没有优势,能源利用率低; 5、超过负载时会破坏同步,高速工作时会发出振动和噪声。 综上所述,交流伺服系统在许多性能方面都优于步进电机。但在一些要求不高的场合也经常用步进电机来做执行电动机。所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机。
伺服电机工作原理及和步进电机的区别
伺服电机工作原理及和步进电机的区别 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统的快速性波纹管联轴器。⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为3.6°、1.8°,五相混合式步进电机步距角一般为0.72 °、0.36°。也有一些高性能的步进电机步距角更小。如四通公司生产的一种用于慢走丝机床的步进电机,其步距角为0.09°;德国百格拉公司(BERGER LAHR)生产的三相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以松下全数字式交流伺服电机为例,对于带标准2500线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/10000=0.036°。对于带17位编码器的电机而言,驱动器每接收217=131072个脉冲电机转一圈,即其脉冲当量为360°/131072=9.89秒。是步距角为1.8°的步进电机的脉冲当量的1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。振动频率与负载情况和驱动器性能有关,一般认为振动频率为电机空载起跳频率的一半。这种由步进电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当步进电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。 交流伺服电机运转非常平稳膜片联轴器,即使在低速时也不会出现振动现象。交流伺服系统具有共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点,便于系统调整。 三、矩频特性不同
教你认识和了解交流伺服电机
教你认识和了解交流伺服电机 本文转载自:工控商务网 伺服电机内部的转于是永磁铁,驱动gS控制的u/V/W三相电形成电磁场转子在此礤场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较调整转子转动的角度。 伺服电机的精度决定于编码器的精度{线数)。两相电机和四相电机有何不同?真正的两相步进电机在定子上只有2个绕组,有4相出线,一般整步步距角为1.8半步为o。9”。在驱动器中,只要对两相绕组电流通断和电流方向进行控制就可以了。而4相步进电机在定子上有四个绕组,有8根出线,整步为O.9,半步为0.45 。不过在驱动器中需要刘4个绕组进行控制,电路的复杂性和成本都明显增加。所以一般我们都选择两相电机配两相驱动器.如果需要更小的步距角,可以采用细分驱动器。细心的用户会发现,四通电机公司生产的电机称为两相,实际有两相4线的,也有四相日线的;驱动器中有两相的却没有四相的。这是因为,四相绕组两两并联或串联后就成为两相绕组,这样四相电机就变成两相电机了,而串联和并联会带来电机.的绕组电阻和电感的成倍变化。从而带来电机运行性能的明显变化。 一般来说,并联使用时,电机有较好的加速性能.高速力矩保持得好,但是电机需要输入2倍‘额定电流的电流.发热较大.对驱动器输出能力的要求相应提高;而在串联使用时,电机有较好的低速稳定性,噪声和发热较小,对驱动器要求不高但是高速力矩损失较大。四通提供的驱动器全部呈两相的,所以电机也必须改接咸两相使用。这就是为什么我们往往要问客户电机,希望接成串联的还是并联的。过去我们的8线电机标成四相,但是经常造
成客户误会.认为四相电机.和两相驱动器不匹配为了减少类似麻烦,后来将电机均标成两相的了。所以,我们有晌简单回答这个问题两相电机.和四相电机实质上是一回事。两相和五相的混合式步进电机的应用场合有何一般来说.两相电机,步距角大.高速特性好,但是存在低速振动区。而五相电机步距角小,低速运行平稳,所以,在刘电机的运转精度要求较高,且主要在中低速段(一般低于日OOr/min) 的场合应选用五相电机.;反之,若追求电机的高速性能,对精度及平稳性无太多要求的场合应选用成本较低的两相电机。另外.五相电机的力矩通常在2NM以上,对小力矩的应用,一般采用两相电机,而低速平稳性的问题可以通过采用细分驱动器的方式解决。 如何控制步进电机的转动方向? 当您的控制韶(上位机)发出的是双脉冲[即正负脉冲)或脉冲信号的幅值不匹配时,需要用我们的信号模块转换为5V单脉冲(脉:中加方向)。 (1)输入为双脉冲信号模块的拨码开关应拨到·双脉:中·位置。当发正脉;中的,电机正转;当发负脉冲的,电机反转。正负脉冲不可同时给,具体时序可参照信号模块说明书。 (2)输入为单脉冲信号模块的拨码开关应拨到单脉冲”位置。当有脉冲输出时电机转动。改变方向信号的高低电平可改变电机转动方向。具体时序可参照信号模块说明书。 伺服电机和步进电机相比,有何优势? 和步进电机相比,伺服电机.有以下几点优势 (1)实现了位置,速度和力矩的闭环控制.克服了步进电机.失步的问题。