民用飞机自动着陆纵向控制研究
飞机自动驾驶系统
自动驾驶系统 什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ?保持机翼水平,不发生滚转。 ?保持飞机当前的仰俯角。 ?保持选定的飞行方向。 ?保持选定的飞行高度。 ?保持选定的上升率或下降率。 ?跟踪一个VOR电波射线(Radial)。 ?跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ?跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。 ?跟踪一个GPS航路。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能: ?保持一个选定的飞行速度(空速或地速)。 ?消除有害的偏航。 ?帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能:
?飞行管理计算机(Flight Management Computers) ?垂直方向导航(Vertical Navigation) ?横向导航(Lateral Navigation) ?飞行水平改变(Flight Level Change) ?机轮控制(Control Wheel Steering) ?自动降落(Autoland) 为什么要使用自动驾驶仪? 有些人认为真正的飞行员是不需要自动驾驶仪的,这个观点是有一点偏颇的,因为适当的使用自动驾驶仪可以减小飞行员工作量,特别是在仪器飞行规则(Instrument Flight Rules)的时候。你可以让自动驾驶仪帮助你完成一些辅助工作(比如象保持航向和高度),可以让你集中精力去完成其他一些与飞行安全相关的工作(比如导航,观察交通,通话等等)。 使用自动驾驶仪也会减轻你在完成一次长距离飞行后的疲劳程度。在整个飞行进程中最危险的进近和降落阶段(尤其在是在云层中的颠簸时),如果飞行员已经被简单的飞行操作耗去了大量的精力和体力……。 两个最重要的准则 当两个飞行员(比如一个教练,一个学员)轮流操作飞机,在任何时候他们会非常清楚现在谁在控制飞机。当一个飞行员移交控制给另一个飞行员,他会说:“你来控制飞机。”当第二个飞 行员开始控制飞机时,他会说:“我来控制飞机。”这种方法避免了两个飞行员同时控制飞机或 者两个人都不在控制飞机的危险情况。 使用自动驾驶仪的话就不一样了。两个最重要的准则就是在使用两轴或三轴自动驾驶仪时,要记住: 1.自动驾驶仪关闭时,你控制飞机。 2.自动驾驶仪打开时,你监控和控制自动驾驶仪。 自动驾驶和飞行
民航专业文献 客机防火系统
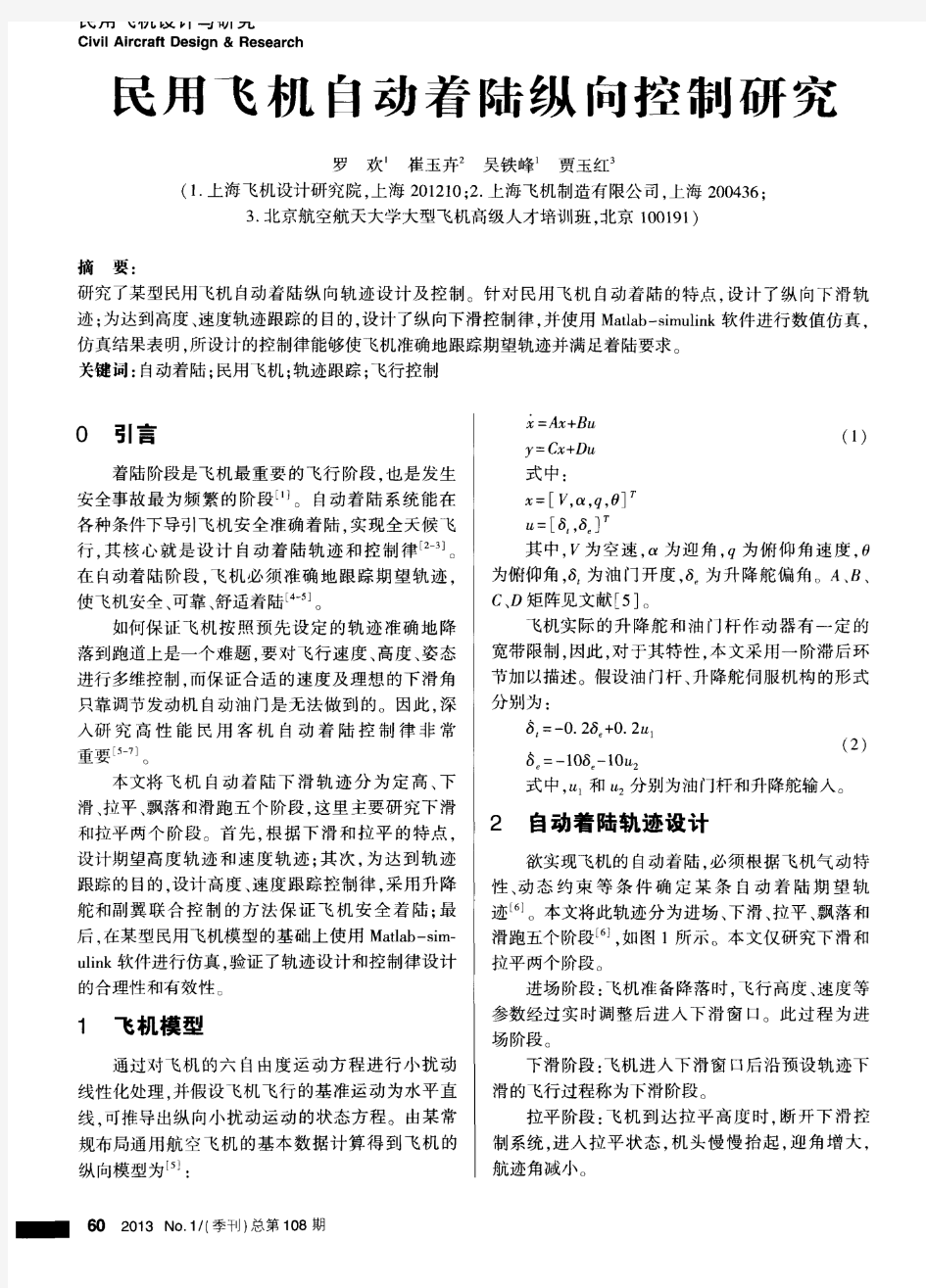
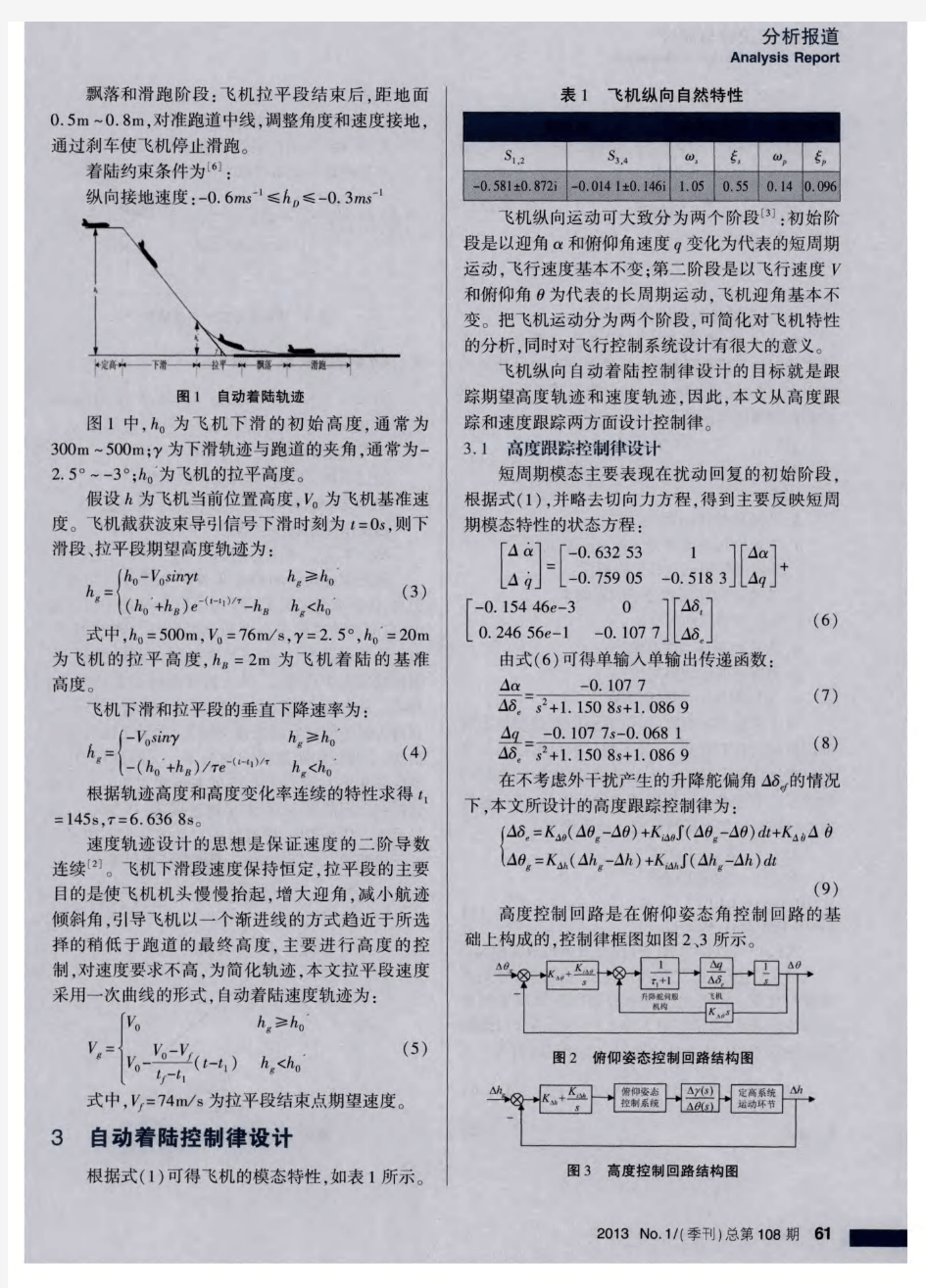
十客机防火系统 1.功用:提供防火监控区域的着火警告信号,并可对发动机和APU采用灭火措施。 2.组成:飞机上防火系统包括机体防火系统、发动机防火系统和APU防火系统。 3.机体防火系统 3.1功用:向机组提供相应部位的火警过/过热信号。 3.2组成:包括四部分内容,分别是:主轮舱火警探测、翼身过热探测、厕所烟雾探测和厕所垃圾 箱灭火。 3.3主轮舱防火系统 功用:感受主轮舱内的高温情况,并给出相应警告。 组成:系统由火警探测器、探测警告电路、红色警告灯和警铃组成。 位置:火警探测器安装在主轮舱顶板上。红色警告灯位于P8板和P7板上。火警警铃装在音响警告设备盒M315内。警铃切断电门在P8板上,轮舱火警警告灯右边。控制警告和测试电路在设备舱过热附件装置M237内,M237位E/E舱E3-2设备架,试验电门在P8板上。 工作原理:当火警探测器感受到高温时,产生一个接地信号送到M237内的控制电路,该电路接通红色警告灯和警铃。 轮舱火警探测器:是连续式探测元件。在因康合金管子的中心有一根导线,导线和管子之间充填由共晶盐浸过的绝缘材料。此共晶盐的电阻在常温下很高,近似绝缘体。当温度升高到440℉/227℃时,其电阻突然减小,将中心导线和合金管连通,因康合金管是接地的,中心导线和控制电路相连,因此控制电路就得到一个接地信号。 设备舱过热附件装置(M237):设备舱过热附件装置里包含了左右翼身过热警告系统和轮舱火警探测系统的电路,根据探测元件的感应来提供警告信号。装置里包含了自检电路,可通过前面板上的四个按钮和显示器、指示灯来进行系统自检工作。自检方法和故障代码说明在前面板上。 主轮舱火警指示:当火警探测器感受到主轮舱温度过高(超过440℉/227℃)时,P8板上的红色轮舱(WHEEL WELL)警告灯和P7板上的红色火警(FIRE WARN)警告灯亮。火警警铃也响,可通过P8板上的警铃切断(BELL CUTOUT)电门可取消警铃。 测试:将P8板上的测试(TEST)电门放到“OVHT/FIRE”位,轮舱火警测试继电器K5接通,火警探测器接地,模拟一个火警信号,则警告灯亮,火警警铃响。 3.4翼身过热探测 功用:感受由气源总管渗漏而引起的过热情况,在P5板上的警告灯和P7板上的主警告灯亮,给驾驶员提供警告信息。
民用飞机气弹簧计分析
民用飞机气弹簧设计分析-机械制造论文 民用飞机气弹簧设计分析 唐行微 (上海飞机设计研究院结构部,中国上海201210) 【摘要】气弹簧是性能可靠和安装方便的定制结构件,相对于民机上使用的传统机械弹簧单元在重量上具备优势。本文介绍了气弹簧的组成结构和工作方式,通过民用飞机舱门设计中的工程实例简要描述了在民机舱门上气弹簧设计的方法,通过CATIA仿真来模拟气弹簧的安装及运行来优化气弹簧的各项基本参数,并且给出了民机气弹簧的可靠性计算标准。 关键词气弹簧;民机舱门;可靠性 0 前言 气弹簧是一种可以实现支撑、缓冲、制动、高度及角度调节等功能的零件,在工程机械中,主要应用于雷达罩、口盖、舱门等部位。气弹簧主要由活塞杆、活塞、密封导向套、填充物、压力缸和接头等部分组成,在密闭的缸体内充入和外界大气压有一定压差的惰性气体或者油气混合物,进而利用在活塞杆横截面上的压力差完成气弹簧自由运动。工作时,惰性气体、油液通过活塞上的阻尼孔时产生阻尼作用,控制气弹簧的运行速度,其运行速度相对缓慢、动态力变化不大。在飞机结构舱门设计中经常使用弹簧作为机构功能实现的一部分单元,通常用于提供手柄回弹的回复力,机构运作的助力以及防止机构意外运动的过中心阻力。其中用于提供助力和阻力的弹簧通常为压缩弹簧,舱门设计中通常采用传统机械弹簧,这种设计存在两方面的劣势:一是传统机械弹簧其材料通常为321固溶钢或者15-5PH不锈钢,在重量上需要付出一定代价,二是目前航空领域弹
簧制造主要通过辅助工具手工弯制,其实际力学性能通常与设计目标存在一定差异且不稳定。气弹簧由于其安装方便,工作平稳,使用安全,成为汽车和机械制造等领域的标准配件。相对于传统机械弹簧,定制气弹簧在确保满足设计需求和重量上具备明显的优势,舱门机构中使用的多处弹簧单元均可使用气弹簧来替代。 本文根据实际舱门的结构特点及气弹簧在舱门上的具体应用,对安装在舱门上的气弹簧的运动状态进行了分析和研究,给出了具体舱门气弹簧的设计步骤,同时对于民机舱门在使用条件及可靠性方面做了基本的分析。 1 工程实例 某型民用飞机设计舱门重量为8.39kg。舱门重心与铰链臂中心转轴的距离为:360.367mm。由于门体、铰链臂(门体进行开关运动的中心) 和气弹簧构成一个杠杆系统。在门打开过程中,通过门体本身重力和气弹簧阻力的双重作用,控制门下降速度门在完全打开位置时,伸展到极限程度。 根据周边结构的实际可安装空间情况确定使用两个气弹簧,并将气弹簧的完全压缩力初步设计为门体重量的3 倍左右,考虑摩擦力等影响,将气弹簧的完全压缩力初步确定为300N。 下图为飞机航截面投影面,两侧气弹簧的安装相对于门体对称面为对称结构。
民用飞机设计参考机种之一波音787_8双发宽体中远程客机_图(精)
机种介绍 ji z hong jie shao 民用飞机设计参考机种之一波音 787-8双发宽体中远程客机波音 787梦想飞机 (D rea m li n er 是波音民用飞机集团研制生产的中型双发宽体中远程运输机 , 是波音公司 1990年启动波音 777计划后的 14年来推出的首款全新机型。波音 787系列属于 200座至 300座级飞机 , 根据具体型号不同其航程可覆盖 6500~16000km 。 里程碑 2004 项目启动 2005. 1. 28 宣布设计研制 2005年第 2季度 构型设计冻结 2005. 9. 23 完成联合发展阶段初步设计 2009. 12. 15 首飞预计于 2010 年第 4季度
交付给启动客户全日空三面图波音公司研制 787使用了声速巡航者所提出的技术以及机体设计 , 并决定在 787的主体结构 (包括机翼和机身上大量采用先进的复合材料。这将使波音 787成为有史以来第一款在主体结构上采用先进复合材料的民用飞机。其重量比例将达到空前的 50%。在发动机方面 , 波音 787可选装通用电气 (GE 公司的 G enX 系列或罗 -罗遄达 1000系列。此外 , 波音 787作为在民用飞机上首次配备两种发动机提供标准的发动机接口界面 , 从而使波音 787飞机能够随时配备任一款制造商的发动机。由于采用了大量复合材料 , 同时采用新型的发动机和创新的流线型机翼设计 , 将使波音 787比目 前同类飞机节省 20%的燃油消耗 , 此外波音 787采用中型飞机的尺寸实现了大型飞机远程的结果 , 并以 0. 85倍声速飞行 , 更好地体现了其点对点远程不经停直飞航线的能力。波音 787将增大客舱湿度 , 降低客舱气压高度 , 乘客会感到更舒适。机上娱乐、因特网接入等设施将更为完善 , 机身截面形状采用双圆弧形 , 顶部空间也进行了优化设计 , 可为乘客提供更宽敞的空间。研制过程 2001~02年波音公司开始研制效率高 , 可以获得高额利润的客机 , 于是向市场推出声速巡航者 , 但
民用飞机气动设计原理
民用飞机气动设计原理民用飞机可以随时转为军用。海湾战争期间,美国曾动员民用飞机用于军事运输。预警机、加油机等军事用途飞机也往往由民用飞机改型而成。下面是为大家分享民用飞机气动设计原理知识,欢迎大家阅读浏览。 宽体飞机相对于窄体飞机,超临界机翼气动设计的难点主要体现在哪里?(Dan) 超临界翼型设计的本质是弱激波翼型的设计。超临界翼型相较于普通翼型,其头部比较丰满,降低了前缘的负压峰值使气流较晚达到声速。即提高了临界马赫数。同时超临界翼型上表面中部比较平坦,有效控制了上翼面气流的进一步加速,降低了激波的强度和影响范围,并且推迟了上表面的激波诱导边界层的分离。因此超临界翼型有着更高的临界马赫数和更高的阻力发散马赫数。 超临界翼型与传统翼型对比 对于窄体飞机,其巡航马赫数范围在0.78-0.80 之间,通常巡航时间占全航程比例不高,因此翼型设计需要多考虑起降、爬升等非巡航性能。而宽体飞机的巡航马赫数则通常在0.85-0.90 之间,并常用于长航程飞机,应此翼型设计需要多考虑巡航性能。更高的巡航马赫数使得机翼表面有很大的超声区,使得通过翼型设计来削弱、推迟激波的设计难度大大加大。 控制律载荷一体化技术能改善飞机什么性能?有何效 益?(Zhijie) 放宽静稳定性使飞机阻力减小,减轻飞机的质量,增加有用升
力,使飞机的机动能力提高; 边界控制技术减轻了驾驶员的工作负担并保证飞机安全; 阵风载荷减缓技术减小阵风干扰下可能引起的过载,从而达到减轻机翼弯曲力矩和结构疲劳的目的,并提高乘坐舒适性; 机动载荷控制改变飞机机动飞行时机翼的载荷分布,降低翼根处的弯曲力矩,从而减轻机翼的结构重量和机动时的疲劳载荷,最终可以提高商载能力和增加飞行航程; 颤振模态控制技术通过改变翼面的非定常的气动力分部,从而降低或改善机翼的气动弹性耦合效应,最终达到提高颤振速度的目的。 A320 阵风载荷减缓控制系统说说风洞试验中,风洞的问题和缩比模型的问题、试验结果的一致性问题(Shaoyun) 风洞试验是指在风洞中安装试验模型,研究气体流动及其与模型的相互作用,以了解实际飞行器的空气动力学特性的一种空气动力试验方法。 F22 飞机风洞模型风洞的基本参数一是风洞几何参数,包括风洞截面积、风洞试验段长度等,二是风洞的试验风速,一般地,0~0.3M 范围为低速风洞,0.3M~1M为高速风洞,大于1M为超音速风洞。 由于模型缩比等原因,风洞试验模型不能完全保留真实飞行器的气动特性。风洞试验通过采用相似准则来尽可能地使试验特性同真 实特性一致,通常根据试验的目的不同会选择不同的相似准则,但一般都会满足的重要准则包括: 几何相似性,模型几何特征同真实飞行器尽可能等比例的放大或缩小; M 数相似,风洞试验M数和飞行器实际使用M数保持一致;
(整理)自动飞行控制系统电子讲稿第一部分
学习情景1 课程导论 1.飞行控制系统发展概述 自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。 1.1方向稳定器 1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。 1.2 电动陀螺稳定装置-姿态稳定 1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。 1.3 自动驾驶仪 20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。 第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个 或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。 二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5; 德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2,
更进一步促进了飞行自动控制装置的研制和发展。 20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。 1.4 自动飞行控制系统 1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。 20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。 20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。例如: 主动控制技术(active control technology—ACT); 余度技术 容错控制技术 20世纪80年代得到迅速发展的火/推/飞综合控制系统等。 20世纪70年代中期,由于计算机的应用使自动驾驶仪和飞机的指引系统组成一个综合系统,使飞机的各种传感器数据、指
说说飞机自动驾驶系统的那点事
说说飞机自动驾驶系统的那点事 坐飞机的没睡着,开飞机的却睡着了!!!据英国广播公司2013年9月27日报道,被曝光的航空资料披露,英国某航空公司的空客A330客机正副机长由于“严重疲劳”,在飞机起飞后不久先后入睡,导致搭载数百人的客机靠自动驾驶飞行。我们时常在不少影视作品中都会看到这样的镜头:飞行员操纵飞机起飞到一定高度后开启自动驾驶仪,悠闲的在驾驶舱内喝咖啡聊天。飞机自动驾驶系统真的如此神奇能让飞机自动飞行吗?1飞机自动驾驶系统自动驾驶系统是一种通过飞行员操作设定,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。波音737系列飞机装有先进的数字飞行控制系统,从起飞后达到400英尺高度到着陆,整个飞行过程都可以自动驾驶,而且飞机会自动优选最佳的飞行航路。这期间,自动驾驶仪有飞行管理计算机系统来控制。什么是自动驾驶系统?自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。自动驾驶系统能做些什么?在FS2004里,Cessna 和
Beechcraft Baron 58 装备的自动驾驶仪具有以下功 能:·保持机翼水平,不发生滚转。·保持飞机当前的仰俯角。·保持选定的飞行方向。·保持选定的飞行高度。·保持选定的上升率或下降率。·跟踪一个VOR电波射线(Radial)。·跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。·跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。·跟踪一个GPS航路。GPS 不支持垂直方向制导的自动导航。在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能:·保持一个选定的飞行速度(空速或地速)。·消除有害的偏航。·帮助飞行员正确的手动控制飞机。在 FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能:·飞行管理计算机(Flight Management Computers)·垂直方向导航(Vertical Navigation)·横向导航(Lateral Navigation)·飞行水平改变(Flight Level Change)·机轮控制(Control Wheel Steering)·自动降落(Autoland)2为什么要使用自动驾驶系统在飞机上使用自动驾驶仪是为了减轻飞行
关于民用飞机重量设计的相关探讨
摘要:民用飞机是用于非军事目的的飞机,它主要是作为一种载人交通工具存在。在民用飞机的设计过程中,飞机的重量重心设计非常重要。民用飞机的重量有着独特的要求,民机重量的分类也有着特殊的标准。因此,民机设计时,需要对整个机身的部件进行重量估计。首先阐释了民用飞机重量设计的重要性,进而对民用飞机各部件的重量预测和控制进行了系统的分析,进而为民用飞机的安全运行奠定了重要的基础。 关键词:民用飞机重量设计 中图分类号:v241文献标识码:a文章编号:1007-3973(2012)004-034-02 1前言 安全是航空工程的第一要务,一般情况下,民用飞机的重量设计要比军用飞机复杂。在民用飞机的设计中,对重量和重心的设计有着独特的要求。在飞行过程中,民用飞机重心的变化要比军用飞机更加系统和复杂。民用飞机的重量设计指的是技术人员通过对飞机部件的设计,既要保证飞机重量的轻便,同时也要飞机具有良好的灵活性和平衡性。民用飞机的重量设计贯穿于飞机设计、制作以及营运的全部过程,对民用飞机的运行安全有着至关重要的作用。 2民用飞机重量设计的重要性 2.1有利于节约研发成本 随着当前经济的发展,现代民用飞机的研发和制作成本日益增长,研制的成本也越来越高。根据相关调查资料显示:在当前民用飞机的研制过程中,每1千克结构制作需要的人力大约为20人左右。所以说,如果相关的设计人员能够减少民用飞机制造的重量,这就能够节省大量的成本,提高民用飞机的经济效益。 2.2有利于飞机的整体协调性 民用飞机重量的各种使用性能指标与重量之间是紧密相连的,并且总是随着民用飞机空机重量的增大而下降。也就是说,在民用飞机运行的过程中,如果民用飞机的自重减轻,飞机的运行性能就会提高,如果自重增加,性能就会随之降低。所以说,民用飞机的重量设计对飞机的整体性能有着重要作用。 2.3有利于民机运营的经济效益 在民用飞机的设计研制过程中,其重量与飞机制造和运营的经济成本有着直接的关系。采取各种措施降低民用飞机的制作成本,保持其销售价格的逐步下降,进而提高民用飞机的经济性已经逐步成为当前民用飞机制造商的最终目的。因此,从民用飞机的重量设计入手,减轻飞机的重量就是从侧面提高飞机运营的经济型,进而提高在市场中的整体竞争能力。 3民用飞机设计的重量控制 民用飞机的重量控制指的是为了更好的能够保证民机在设计阶段所设计的性能指标的实现,而根据实际情况提出的确保实现目标重量的一种管理和技术相互结合的工程方法。在民用飞机的设计过程中,总体方案结束之后,民机的特征重量就已经确定,此时,民机相关部件及运行系统的目标重量也确定好了。因此,相关技术人员必须对起进行严格的控制,保证重量的合理性。要做好民用飞机的重量控制,就要做到以下几个重要的方面: (1)在民用飞机设计的过程中,要积极确立正确的目标重量值。一般情况下,民机的重量值是在设计方案的过程中逐渐形成的,与飞机的设计技术目标相适应。同时,相关设计人员要按照飞机重量设计的相应标准进行重量分类。在民用飞机重量设计中,重量分类是一个十分重要的概念,是重量工程的一个重要标准。通过有效掌握重量分类,能够为飞机重量设计提供重要的依据,保证设计工作的顺利运行。 (2)认真确定民机重量设计余值。民机的重量设计余值指的是在民用飞机设计的过程中,重量和平衡报告中还没有预料到的重量增量。一般情况下,在民机设计中,重量设计余值应
一种无人机自主着陆视觉跟踪方法
设计与应用 计算机测量与控制.2009.17(7) Com puter Measurement &C ontrol 1387 中华测控网 https://www.360docs.net/doc/7d154487.html, 收稿日期:2008 1216; 修回日期:200901 24。 基金项目:总装预研基金项目(9140A25040307HK0306)。作者简介:邓红德(1957),男,陕西重阳人,副教授,主要从事控制、制导与仿真方向的研究。 文章编号:1671 4598(2009)071387 03 中图分类号:T P13 文献标识码:A 一种无人机自主着陆视觉跟踪方法 邓红德1,王丽君1,金 波2 (1.西北工业大学无人机特种技术国家重点实验室,陕西西安 710065; 2.成都飞机工业公司,四川成都 610092) 摘要:视觉导航是利用图像信息进行飞机定位的,在无人机着陆过程中,为使机载传感器能始终追踪到机场跑道,提出了一种基于摄像机姿态与变焦控制的视觉跟踪方法;该方法通过调节摄像机姿态来追踪目标特征点,使目标特征点尽量位于成像平面的中心,然后根据无人机与机场跑道的距离,适时的调节焦距,以保证图像特征点完全位于图像平面内;实验结果表明,该法能很好地控制摄像机姿态角,使目标特征点位于图像中心附近,达到很好的跟踪效果;且该法操作简单,不需要增加图像处理的难度,实时响应速度快,可以满足工程需要。 关键词:特征点跟踪;变焦控制;视觉导航 UAV Autonomy Landing Visu al Tracking Algorithm Deng H o ng de 1,Wang Lijun 1,Jin Bo 2 (1.N ational L abor ator y of U AV Special T echnolo gy ,N o rthwester n P olytechnic U niv ersity ,Xi an 710065,China; 2.Cheng du A ir craft Industr y Company ,Cheng du 610092,China) Abstract:Vision n avigation uses the image in formation to evaluate the aircraft position,in the process of landing,for airborne sen sor can alw ays follow up to the airport runw ay,presen ts a vis ual tracking algorithm w hich b as ed on camera controlling.T he alg orith m by adju sting th e cam era to track th e target featu re makes the feature points as pos sible in the centre of imaging plan e,and then according to the dis tance from the airport runw ay,tim ely adjus t th e focal length to en sure the image feature poin ts in the image plane com pletely.Experimental resu lts show that the law can con trol the camera angle w ell th at made the target image feature points in the vicin ity.And that the method is simple,don't need to increas e the difficulty of image p roces sing,and the real-tim e res ponse s peed is quick,can meet the project n eed s. Key words :featu re points tracking;zoom control;visu al navigation 0 引言 计算机视觉由于其经济、无源、信息丰富等特性,已经成为无人机自主着陆中不可或缺的重要信息源,通过将视觉信息与惯性导航信息进行融合,可以得到精确的导航信息,如控制模型直升飞机完成自主着陆[1],或是固定翼模型飞机完成自主着舰任务[2]。视觉导航主要是通过对视觉传感器获得的图像进行处理,从而得到无人机导航定位的一种技术,因此,视觉传感器能否很好地追踪目标是无人机完成自主着陆一个必要环节。 1 视觉跟踪方法 基于计算机视觉的无人机自主着陆过程中对图像的处理,无外乎两种情况,一种是提取图像特征点[1];另外一种就是识别图像边缘线或是特征线。但是对大多数视觉算法来说最终还是要归结到点的运算[3],因此图像上的特征点能否始终位于图像平面内,是我们亟待解决的问题。但是只是保证特征点位于图像平面内是远远不够的,例如当特征点比较靠近图像边缘时,如果此时飞机受到小的扰动则就会很容易造成特征点的丢失,使视觉系统失效。因此视觉跟踪方法需要解决的问题就是使特征点都尽量靠近图像成像平面的中央。 1 1 条件假设 无人机在整个视觉着陆过程中,采用基于特征点的运动估计,且特征点通过图像处理算法已经正确获得。在进入着陆段时,会对机载设备进行一次对准,使其基本对准机场跑道,根据获得的特征点利用视觉算法,可以解算出无人机的位置与姿态。1 2 特征点布局 为使摄像机全程都可以跟踪到特征点,特征点的布局方案如图1所示。即在机场跑道的着陆区域以及机场终端区域布置特征点,这样不仅保证了无人机远离机场时能够很好地区分特征点,而且无人机在滑跑时,可以跟踪机场终端设置的特征点,估计其滑行航向。为了更好地完成特征点的追踪,可将特征点布置成一定的形状,突出所要跟踪的特征点,此处采用三角形的特征点布局方法。 图1 特征点布局 1 3 跟踪方法 在整个无人机着陆过程中,摄像机的安装方式采用可变安
飞机自动驾驶系统
1.天气状况很好.能见度很好.基本静风.没有乱流(还要符合与前机的尾流间隔) 2.飞机本身没有故障.符合自动驾驶落地要求 3.地机场设备运转正常.航向道和下滑到工作稳定指示正常.能满足飞机自动进近落地需求 4.期间机组需要严密监控.发现异常要立即断开自动驾驶转为人工操纵 波音737系列飞机装有先进的数字飞行控制系统,从起飞后达到400英尺高度到着陆,整个飞行过程都可以自动驾驶,而且飞机会自动优选最佳的飞行航路。这期间,自动驾驶仪有飞行管理计算机系统来控制。 飞行管理计算机系统里装有导航数据库和性能数据库,包括所有航线的计划航路,只要飞行员在起飞前输入所飞航线的相关参数,那么,从他按下自动驾驶仪按钮的那一刻起,飞机就会完全按照计划航线自动飞行,直到着陆。 一般情况下,机场都装有引导飞机着陆的仪表着陆系统,该系统利用无线电波在空中形成一条看不见得飞机下滑道。当飞行管理计算机将飞机引导到下滑道时,自动驾驶仪通过接受无线电信号来控制飞机,使飞机沿下滑道自动着陆到跑道头,再由飞行员操纵飞机沿跑道滑跑。在波音767、747-400和777飞机上,滑跑这一段也可以由飞机自动完成。 能稳定飞机的飞行状态,并能操纵飞机改变飞行状态的自动装置。在有人驾驶的飞机上使用自动驾驶仪是为了减轻飞行员的负担,使飞机自动按给定的姿态、航向、高度和马赫数飞行。它由敏感元件、计算装置、执行机构(舵机)和回零系统等组成,与飞机构成反馈回路。敏感元件测出飞机某一时刻的实际飞行参数,经比较器与需要值比较,再输出修正信号;计算装置按调节规律算出相应的舵面偏转量;舵机操纵舵面到应处位置;回零系统使自动驾驶仪接通使飞机保持在接通前的基准状态。自动驾驶仪从原理上可分为比例式和积分式两种。前者的舵机输出量与被调参量的偏差成比例,其特点是结构简单,但有静态误差;后者的舵机输出量与被调参量的偏差积分成比例,其特点是没有静态误差,但结构复杂。有的飞机上自动驾驶仪与人工飞行操纵系统二者能同时工作;有的飞机上则一个处于工作状态时另一个必须处于断开状态。( 什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ·保持机翼水平,不发生滚转。 ·保持飞机当前的仰俯角。 ·保持选定的飞行方向。 ·保持选定的飞行高度。 ·保持选定的上升率或下降率。 ·跟踪一个VOR电波射线(Radial)。 ·跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ·跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。·跟踪一个GPS航路。 GPS 不支持垂直方向制导的自动导航。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能:·保持一个选定的飞行速度(空速或地速)。 ·消除有害的偏航。 ·帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能: ·飞行管理计算机(Flight Management Computers)
民用飞机气动设计原理
民用飞机气动设计原理 民用飞机可以随时转为军用。海湾战争期间,美国曾动员民用 飞机用于军事运输。预警机、加油机等军事用途飞机也往往由民用飞机改型而成。下面是为大家分享民用飞机气动设计原理知识,欢迎大家阅读浏览。 宽体飞机相对于窄体飞机,超临界机翼气动设计的难点主要体 现在哪里?(Dan) 超临界翼型设计的本质是弱激波翼型的设计。超临界翼型相较 于普通翼型,其头部比较丰满,降低了前缘的负压峰值使气流较晚达到声速。即提高了临界马赫数。同时超临界翼型上表面中部比较平坦,有效控制了上翼面气流的进一步加速,降低了激波的强度和影响范围,并且推迟了上表面的激波诱导边界层的分离。因此超临界翼型有着更高的临界马赫数和更高的阻力发散马赫数。 超临界翼型与传统翼型对比 对于窄体飞机,其巡航马赫数范围在0.78-0.80之间,通常巡 航时间占全航程比例不高,因此翼型设计需要多考虑起降、爬升等非巡航性能。而宽体飞机的巡航马赫数则通常在0.85-0.90之间,并常用于长航程飞机,应此翼型设计需要多考虑巡航性能。更高的巡航马赫数使得机翼表面有很大的超声区,使得通过翼型设计来削弱、推迟激波的设计难度大大加大。 控制律载荷一体化技术能改善飞机什么性能?有何效 益?(Zhijie)
放宽静稳定性使飞机阻力减小,减轻飞机的质量,增加有用升力,使飞机的机动能力提高; 边界控制技术减轻了驾驶员的工作负担并保证飞机安全; 阵风载荷减缓技术减小阵风干扰下可能引起的过载,从而达到 减轻机翼弯曲力矩和结构疲劳的目的,并提高乘坐舒适性; 机动载荷控制改变飞机机动飞行时机翼的载荷分布,降低翼根 处的弯曲力矩,从而减轻机翼的结构重量和机动时的疲劳载荷,最终可以提高商载能力和增加飞行航程; 颤振模态控制技术通过改变翼面的非定常的气动力分部,从而 降低或改善机翼的气动弹性耦合效应,最终达到提高颤振速度的目的。 A320阵风载荷减缓控制系统 说说风洞试验中,风洞的问题和缩比模型的问题、试验结果的 一致性问题(Shaoyun) 风洞试验是指在风洞中安装试验模型,研究气体流动及其与模 型的相互作用,以了解实际飞行器的空气动力学特性的一种空气动力试验方法。 F22飞机风洞模型 风洞的基本参数一是风洞几何参数,包括风洞截面积、风洞试 验段长度等,二是风洞的试验风速,一般地,0~0.3M范围为低速风洞,0.3M~1M为高速风洞,大于1M为超音速风洞。 由于模型缩比等原因,风洞试验模型不能完全保留真实飞行器 的气动特性。风洞试验通过采用相似准则来尽可能地使试验特性同真
747自动驾驶系统
机师通用训练教材 747-400自动驾驶及飞航管理系统747-400 Auto-Pilot System & FMS 课程内容: PSS747/747-PS1及其它高拟真度747-400飞行仿真软件之自动驾驶系统/飞航管理系统操作说明。 本课程仅列入仿真飞行软件相关内容及必要之概念,部份内容因仿真软件之真实程度限制,可能与实际747-400之操作有所不符,请同仁注意。 课程目的: 对波音747-400之AP/FMS系统操作完全熟悉,并了解其运作逻辑,并能藉此操作任何相似之747-400仿真飞行软件。 于搭乘747-400时若遇到电影情节(正副驾驶均失能,机上无人能操控),能增加存活机率。 宣告: 一、本教材内容仅适用于仿真飞行软件,不得用于实施真实飞行员 训练。 第一章自动驾驶基本概念建立3 第二章EFIS飞航仪表8 第三章MCP面板操作27 第四章FMS-CDU操作31
写在前面 本文基本上是教材。不,不是基本上,它根本就是教材。所以,它不是操作手册。因为它不是操作手册,所以没有很明确的按系统分门别类。若读者遇上某系统的问题,想翻到那一部份看看,可能找不到,因为前面讲过了,故到此就省略了。或者,觉得这时候讲不太妥,就写“后详”。 因为它是教材,所以废话特别多;尤其是依本人精神,废话更多。因为我不想用「专业」语法吓人,而笔者也并非专业人士。废话多,为了解释原理。有时为了解释原理,不得不拆散系统。结论:本文最好还是一路看下去,别跳页。 本文不是针对任何一种仿真飞行软件所写,而是希望以真实飞机系统为教学对象。因为现在软件越做越好,天晓得教材写完后多久,就出来个一模一样的?针对某特定软件写「系统操作」,勤劳人当为之,笔者懒矣,干脆一劳永逸。问题来了,要对真飞机写教材,图怎么办?没办法,有粥吃粥有屎吃屎。各位可以发现大部份的图是从747 PS1中抓来的。它的画面实在不怎么样,可是它最真。所以不要误会我是在写PS1教材!我作梦都会梦到该公司会出一套FS版本的系统外加AIR文件。 最要说明的是,手中没PS1的同好翻一翻后可能会觉得大部份的内容都用不上,看这份教材干什么呢? 一,让你知道你现在玩的系统有多假。 二,知道真的怎么操作,假的还难得了人吗? 三、波音系统骨子里都一路货,触类能旁通。真的,这份看看,767的系统 也照玩,虽然还是得摸一摸。 最后,747 PS1其实还真是个好东西,想学747-400系统的同好,最好设法拥有一套。
民用飞机机头外形设计与研究
民用飞机机头外形设计与研究 摘要本文结合机头外形设计的相关约束条件,分析了机头外形定义的关键参数,提出了一种流线型机头外形设计的方法和思路。 关键词参数化建模;机头外形;民用飞机 1 概述 飞机机头外形为飞机等直段之前部分的外形,包括驾驶舱视窗(主风挡、侧窗)、前起落架舱门、雷达罩和前登机门等部件的外形。机头外形设计其主要目的是为驾驶员提供足够的工作空间,保证驾驶员有良好的视野,满足机载设备的安装空间要求,在满足使用要求的情况下使气动性能最优。 2 机头外形设计相关约束 机头外形设计需要面对多方面的约束,是在矛盾中寻求一种平衡的过程,以下内容对相关约束条件进行了研究。 2.1 内部布置约束 内部布置要求的约束,包括雷达天线的包络面,侧显区域,侧壁区域,平显区域、顶部空间等。与驾驶舱内部布置密切相关的主要有两个因素,即设计眼位和座椅参考点。设计眼位(Design Eye Position)是当驾驶员处于正常驾驶状态,两眼之间连线的中点所在位置,是飞机承制方用于确定驾驶舱内部和外部视野以及驾驶舱几何尺寸而选择的一个设计基点,该点坐标为:(XE,YE,ZE)。座椅参考点(Seat Reference Point)是当座椅受到一个第50百分位数的人体载荷,其坐垫和背垫成压缩状态时,坐垫表面的一条切线与背垫表面的一条切线之间的交点,该点与眼位点位于同一展向站位平面内并通过Les、Hes两个参数确定,地板到座椅参考点的距离由Hsf参数确定。设计眼位处的上、下视线分别由Au,Ad两个参数确定,设计眼位到风挡的距离由Lwe参数确定,风挡的倾斜角度由Aw参数确定,风挡的长度则由风挡与上下视线的交点确定。如图1所示: 《民用飞机驾驶舱视野要求》(HB 7496-97):标准左驾驶员视野如图2所示,右驾驶员视野对称。《民用飞机驾驶舱座椅设计要求》(HB 7046-94)对驾驶员设计眼位和座椅参考点的相对位置关系要求如图3所示。 2.2 结构设计约束 结构的设计约束主要体现在结构实现方面,需要能法向向内偏置offset >0.02D+25.4mm(D-机身横截面当量直径),再考虑内装饰高度25.4mm,满足结构和内装饰设计基准要求;光滑过渡、没有0厚度部位,便于结构设计制造;为机头框、地板、壁板、雷达罩、风挡、通风窗、观察窗骨架、内装饰设计
自动驾驶仪,自动油门,飞行指挥仪
自动驾驶仪,自动油门,飞行指挥仪 *** Intended For Flight Simulation Use ONLY * 仅供飞行模拟使用* 本文中所有术语的翻译,均以英文原文为准。*** 什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ?保持机翼水平,不发生滚转。 ?保持飞机当前的仰俯角。 ?保持选定的飞行方向。 ?保持选定的飞行高度。 ?保持选定的上升率或下降率。 ?跟踪一个VOR电波射线(Radial)。 ?跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ?跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。 ?跟踪一个GPS航路。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能: ?保持一个选定的飞行速度(空速或地速)。 ?消除有害的偏航。 ?帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能: ?飞行管理计算机(Flight Management Computers) ?垂直方向导航(Vertical Navigation) ?横向导航(Lateral Navigation) ?飞行水平改变(Flight Level Change) ?机轮控制(Control Wheel Steering) ?自动降落(Autoland)
无人机自动驾驶仪
无人机自动驾驶仪 1.自动驾驶仪(autopilot): 按一定技术要求自动控制飞行器的装置。在有人驾驶飞机上使用自动驾驶仪是为了减轻驾驶员的负担,使飞机自动地按一定姿态、航向、高度和马赫数飞行。飞机受暂时干扰后,自动驾驶仪能使它恢复原有的稳定飞行状态,因此,初期的自动驾驶仪称为自动稳定器。自动驾驶仪与飞机上其他系统交联还可实现对飞机的控制。在导弹上,自动驾驶仪起稳定导弹姿态的作用,故称导弹姿态控制系统。它与导弹上的或地面的导引装置交联组成导弹制导和控制系统,实现稳定和控制的功能。 1.1发展概况 1914年美国人E.斯派雷制成电动陀螺稳定装置,这是自动驾驶仪的雏型。30年代,为了减轻驾驶员长时间飞行的疲劳,开始使用三轴稳定的自动驾驶仪。它的主要功用是使飞机保持平直飞行。50年代,通过在自动驾驶仪中引入角速率信号的方法制成阻尼器或增稳系
统,改善了飞机的稳定性。50年代以来自动驾驶仪发展成为飞行自动控制系统。50年代后期,又出现自适应自动驾驶仪,它能随飞行器特性的变化而改变自身的结构和参数。60~70年代,数字式自动驾驶仪应运而生,它在“阿波罗”号载人飞船登月舱的登月过程中得到应用。 1.2原理和组成 自动驾驶仪是模仿驾驶员的动作驾驶飞机的。它由敏感元件、计算机和伺服机构组成。当某种干扰使飞机偏离原有姿态时,敏感元件(例如陀螺仪)检测出姿态的变化;计算机算出需要的修正舵偏量;伺服机构(或称舵机)将舵面操纵到所需位置。自动驾驶仪与飞机组成反馈回路,保证飞机稳定飞行。 1.3分类和特点 自动驾驶仪可按能源形式、使用对象、调节规律等分类。 ①按能源形式:分为气压式、液压式、电气式或者是这几种形式的组合。现代超音速飞机多安装电气(或电子)-液压式自动驾驶仪。气压式伺服机构主要用于导弹。 ②按使用对象:分为飞机自动驾驶仪和导弹自动驾驶仪。飞机自动驾驶仪多具有检测飞机姿态角的敏感元件,能稳定飞机的姿态角。为了提高这种自动驾驶仪的稳定效果,可配合使用速率陀螺仪。战术导弹只需要稳定角速度,其姿态角根据目标的运动而改变,因此,在自动驾驶仪中不设检测角位置的敏感元件。巡航导弹、战略导弹和运载火箭需要稳定姿态角,在这些飞行器的自动驾驶仪中仍有检测姿态角的敏感元件。 ③按调节规律:自动驾驶仪的调节规律(即数学模型)表示伺服机构的输出量与被调参量之间的函数关系。飞机自动驾驶仪依调节规律的不同分为比例式自动驾驶仪和积分式自动驾驶仪。比例式自动驾驶仪是以伺服机构输出的位置偏移量(如舵偏角)与被调参量(如姿态角)的偏差成比例的原理工作的。它的结构简单,应用很广,但在干扰作用下会产生静态误差。积分式自动驾驶仪是以伺服机构输出的位置偏移量与被调参量偏差的积分成比例的原理工作的,它没有静态误差,但系统的稳定性差,结构复杂,应用受到一定限制。 导弹自动驾驶仪按被调参量的性质可分为位置式自动驾驶仪、定向式自动驾驶仪和加速度式自动驾驶仪。位置式自动驾驶仪的被调参量是飞行器的角位置(即姿态角),伺服机构的输出量与姿态角的偏差成比例。定向式自动驾驶仪的被调参量是飞行器的姿态角速度,伺服机构的输出量与姿态角速度的偏差成比例。加速度式自动驾驶仪的被调参量是飞行器的法向加速度,伺服机构的输出量与法向加速度的偏差成比例。 现代自动驾驶仪的趋势是向数字化和智能化方向发展。80年代以前,战术导弹由于工