(仅供参考)第六篇--vissim动态交通分配
第六篇 动态交通分配
6.1 动态交通分配介绍
在前面的章节里,仿真车辆在路网中行驶的路径都是人为设置的,仿真中的“驾驶员”并没有机会自己选择从起点到终点的道路。在非实时仿真、简单路网中这种模拟道路交通的方法是合适的。但是,如果仿真的路网较大,路网中的车辆从起点到终点有多种不同的路径选择,同时要将车辆分布在这些路径上的话,前面使用的方法将不可能完成这种网络上的路径设置。对一个给定了起迄点的出行需求矩阵,计算该矩阵在路网上的交通量分布的问题称之为交通分配,它是交通规划过程的一个基本步骤。
交通分配是所有驾驶员或交通使用者根据道路网情况,对出行路径进行选择的一种计算模型。该模型必须帮助出行者首先找出一组可供选择的路径,然后根据计算方法对可选择的路径进行评价,最后描述出驾驶员如何根据这些评价进行路径选择。
交通规划中的交通量分配往往是静态分配。“静态”是指出行需求(有多少车辆需要在路网中出行)和道路网络本身不随时间变化。然而实际上的出行需求在一天中变化很大,并且道路网络的交通状况也随时间而变化,例如信号控制在一天不同时段发生变化。考虑到这些随时间而变化的因素,VISSIM给出了动态交通分配的方法。
在VISSIM仿真模型中提出动态路径选择主要考虑以下两个方面:
z即便在不考虑可替代路径的情况下,越来越大的路网也使得人工设置或建立所有起迄点间的路径变得不可能;
z在评估各种交通控制方法和路网变化对出行路径选择的影响时,模拟真实的路径选择行为非常有意义。
6.2 动态交通分配的原则
在VISSIM中动态交通分配是基于迭代仿真的思想。即一个模拟路网不只是仿真一次,而是不断地重复仿真。驾驶员根据前面仿真获得的出行时间(或出行费用)来进行本次仿真中的路径选择。模拟这种“用户自学习过程”,必须完成下列任务:
z必须找到起迄点间的路径。VISSIM假定并非所有人都使用最佳路径,而是有一小部分人会使用那些次优路径;
z驾驶员必须有某种对路径进行评价的方法,以便于进行路径选择。VISSIM中是根据计算得出的总出行费用进行评价的。总出行费用由路径长度、行程时间和其它
成本(例如道路或桥梁的通行费等)加权求和得到;
z从一系列路径中选择某条路径的概率是用修正的LOGIT模型计算后得到。
6.3 动态分配前期准备工作
6.3.1需要注意的几个问题
(1)对象:不是只有几个节点,而是整个大的路网;
(2)动态交通分配模块使用的前提:○1需要仿真大范围的路网的交通情况;○2针对该路网范围,要有OD矩阵可以提供;
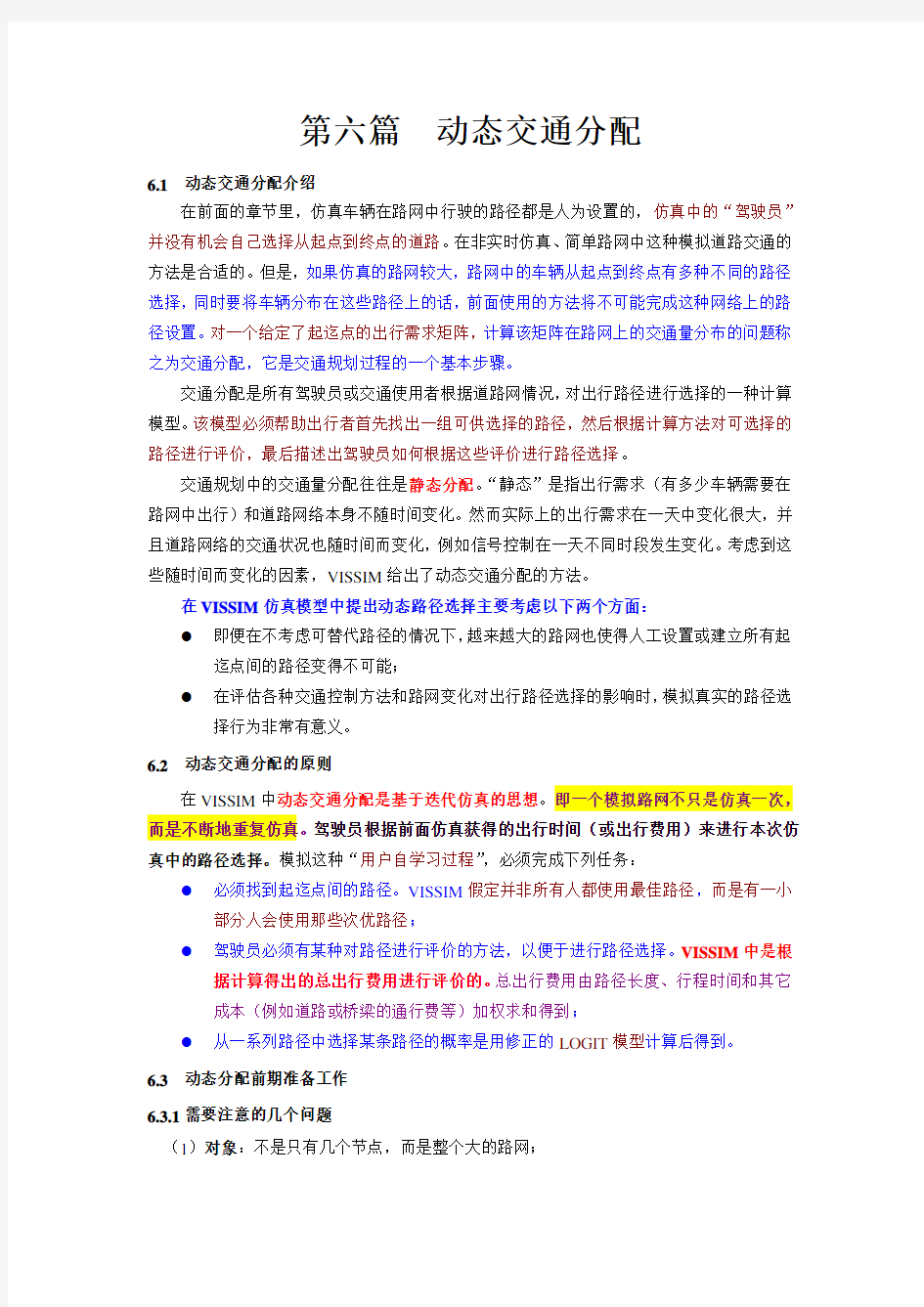
(3)过程:从GIS数据或地图→宏观路网→微观路网+OD矩阵=动态分配,如下图;
(4)特征:主要包含车辆出行、路径搜索和动态性三者。
车辆出行:OD矩阵定义了交通需求;
路径搜索:无法预先定义可能的路径;
动态性:路径与出行时间有关(比如,在7:00-12:00之间有着不同的交通需求分布,再细化就是每个小时的OD也不一样)。
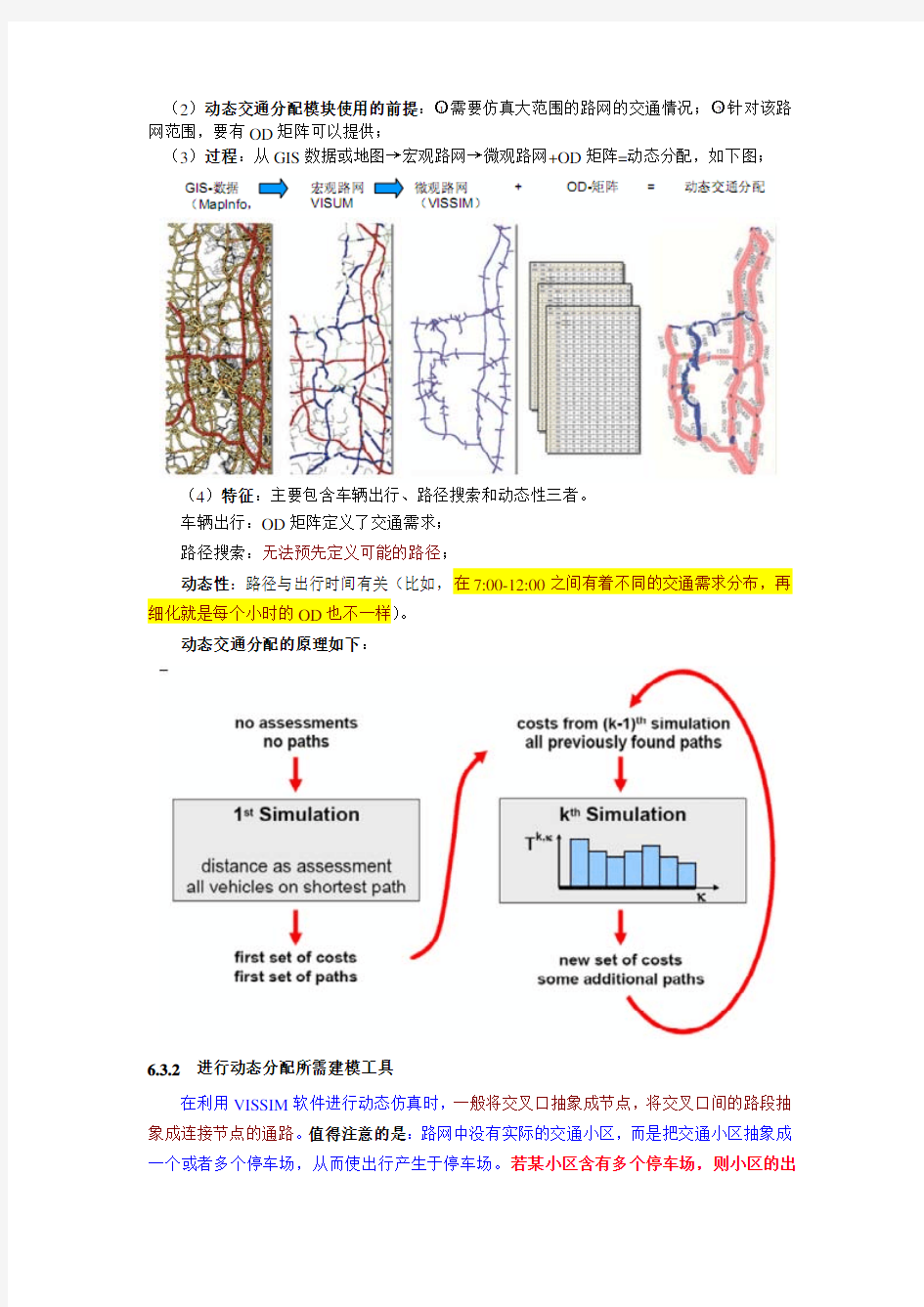
动态交通分配的原理如下:
6.3.2 进行动态分配所需建模工具
在利用VISSIM软件进行动态仿真时,一般将交叉口抽象成节点,将交叉口间的路段抽象成连接节点的通路。值得注意的是:路网中没有实际的交通小区,而是把交通小区抽象成一个或者多个停车场,从而使出行产生于停车场。若某小区含有多个停车场,则小区的出
行分布量应按照一定的比例分配到各个停车场,这个比例将直接影响交通仿真运行结果。
1、需要建模的元素
节点:抽象地定义交叉口;
停车场(类型为小区连接器):是所有交通的出发地和目的地;
需要额外的路段和连接器来布置停车场;
用户可以设置通路关闭;
动态的路径选择。
(1)节点
定义一个节点的步骤如下:
1) 选择节点模式;
2)在需要定义节点的区域点击鼠标右键,开始绘制一个多边形。点击鼠标右键依次确定多边形各个顶点的位置,绘制完毕后双击鼠标右键。在弹出的节点窗口中输入相关数据,设置相关属性并点击确认。
No:节点编号;
Name:可选名称或注释;
节点评价:如果节点选项通过“评价-文件”被选中,且该选项处于激活状态,则需要对该节点进行评价。一般对于要评价的节点,勾选这一项使其被激活。
标识:当显示所有节点标签时(见“查看”→“路网元素…”),该选项允许单独关闭所选节点的标签显示。
小技巧:
单选模式:在节点内的任意地方点击鼠标左键,然后按住鼠标键将节点拖到目标位置。
复制:按下Ctrl键,点击鼠标左键并将鼠标移到目标位置。
建立节点时应注意几个问题(建模规则):
1)每个分叉或者汇合的地方都必须框在一个节点内部;
2)在一个节点内部,只有一条连接节点间的道路(唯一性)。
(2)通路
通路是路径搜索的基本组成部分,路径是由一系列通路组成的。仿真运行开始后,VISSIM将根据路径选择模型计算在所有通路上行驶所需要的行程时间和出行费用。通路分为两种:节点内部的通路和节点之间的通路,节点内的通路表示转向车流,在VISSIM 中,这些通路具有真实的长度。两个节点间可以具有多条通路(一条也行)。
查看VISSIM自动创建的通路的步骤如下:
1) 当路网至少包含2个节点,且节点模式处于激活状态时,选择菜单:编辑→通路选择…,打开通路选择窗口;
2)在从节点和到节点列表中选择一对节点;
3)在通路选择窗口的顶部列表中将显示这对节点间的所有可用通路的编号、针对车辆类型的费用,以及选定时间间隔内的所有通过交通流量。此外,可以显示针对所选的车辆类型关闭当前通路;
1)选定目标通路,它将在VISSIM路网中以黄色或红色线条显示出来。通路关闭可以如下定义或禁用:
Edge closed:关闭通路(针对所选通路);
Open/Closed Edge:打开/关闭全部通路按钮(所有通路)。
选中列表中的通路,将显示在VISSIM路网。自动创建的VISSIM通路在路网中突出显示:黄色=未关闭;红色=动态交通分配过程中被关闭的通路。选择窗口中显示的路径和费用都是最后一次迭代仿真运行更新后的结果。因此,通路选择窗口只显示最后一次迭代仿真运行的结果,如果费用和路径文件在迭代中选择保存下来的话。当针对某条通路选择通路关闭时,该通路将在动态交通分配过程中被完全禁用,被禁用的通路显示为红色。通路的关闭可以是选中的一条通路,也可以是所有的通路关闭(Close All Edges),想解除通路关闭时,点击Open All Edge s→OK即可。
通路Edge(在两个节点之间或者一个节点内部的路段顺序),两者之间的关系如下图所示。
(3)停车场和小区
动态交通分配中的交通需求不是在所选路段上输入车流量,而是以OD 矩阵的方式输入的,这要求将仿真区域分成若干次一级的交通小区,OD矩阵中的元素存储了在给定时间间隔内各个小区之间的出行量,因此这是一个(起点小区数×讫点小区数)的矩阵。 使用停车场建模车辆进入或离开路网的实际地点。停车场只能隶属于某一特定的小区,即起始或
终止于某一小区的交通出行均起始或终止于该小区下属的停车场。每个小区可以拥有不止一个的停车场,小区与小区之间的来往交通可以使用该小区内的任意一个停车场。根据用户定义的相对交通流量,将小区的起始交通流量分配到各个停车场上。但一个停车场只能隶属于一个小区。
定义一个停车场的步骤如下:
1) 选择停车场模式;
2) 选择一个路段;
3) 在选定路段上按住鼠标右键并拖动鼠标,设置停车场的位置。
小区:根据 OD 矩阵给小区编号,确定该停车场属于哪个小区;
相对流量:当一个小区有多个停车场时才涉及到,即小区交通需求分配到该停车场的比例,例如其值为0表示该停车场无交通需求(例如当该停车场处于断头路上,即路网的末端处)。每个小区所有停车场的需求百分比加起来总和设置为100%,然后计算出每个停车场的对应的分配值;当一条路段(且两个节点之间)需要设置两个或以上停车场时,这时可以在路段合适位置创建“虚拟支路”,需要创建多少个停车场就创建多少条“虚拟支路”,并在“虚拟支路”设置相应的停车场,并注意比例的设置;
容量:仅适用于抽象停车场;
初始的占有率(仅适用于抽象停车场):表示仿真开始时停车场的占有量,它与目的停车场选择计算有关(也与动态路径决策有关)。初始占有量不包含仿真期间到达停车场后来可能离开的车辆(可以包含在矩阵中);
期望车速:不同的车辆类型可以设置不同的期望车速分布(一般取默认值,即所有车辆的平均期望速度),当然也可以重新定义(new)。
标识:当显示所有停车场标签时(见“视图”→“路网元素…”),该选项允许单独去掉所选停车场的标签。
建立停车场和小区时应注意几个问题(建模规则):
(1)当在路网边缘建立停车场时,边缘上的单一节点可以用来正确地设置O 点和D 点的停车场;
(2)停车场可以放置在两个节点之间的通路上,也可以放置在节点内部(非边缘节点);
(3)两节点之间或节点内部至多只能设置一个停车场,且停车场不能压住节点的位置;
(4)如果 VISSIM 无法找到使用通过某一个停车场的路段的路径的话,则对应该路径的通路将不考虑;
(5)如果停车场设置在离开路网的路段上,即该路段不能达到其他停车场,那么该停车场相对交通量必须设置为0;
(6)选择小区连接器,并且小区连接器的Zone ID号必须与矩阵中的Zones号一致;
(7)导入的OD(格式为.FMA)矩阵必须与VISSIM的.ino文件放入一个文件夹,否则无法导入,并且导入之前必须先定义所需要的交通组成(在定义交通组成前首先定义停车时间分布、功率分布、速度分布等);
(8)停车场所在的路网通路的费用取决于驶入和驶出该停车场的所有车辆的平均
费用;
(9)通过CTRL+SHIFT+C快捷键,可以将所有停车场的相对流量设置到当前路径文件(WEG)中存储的其所在路径的总流量中。通过这种方式,被导入的停车场的相对容量可以更好地匹配到路网,这将有助于用户在VISUM导入的路网文件中设置新的流量方案(如新的矩阵和路径文件)。
设置完成后,进行仿真可能会出现的错误:
如果错误文件里碰到类似于“The destination parking lot 10 is part of several different edges”的错误信息时,这通常至少是一个节点被遗漏或放错了位置(或节点压住停车场),从而导致在此处两个节点之间找到多条路径,并对每条路径的费用单独评价。在少数的情况下,对于同一物理路段得到不同的费用,从而导致错误的车辆分布。
为解决这个问题,在VISSIM中设置停车场位置时,应保证:
停车场之前的路线分叉点和之后的路线并入点(沿行车方向)都包含在一个节点中;
根据路线的分叉点和并入点,正确设置停车场两端的节点。
(4)OD矩阵
在动态交通分配中,多数情况下使用 OD 矩阵构建交通需求模型,也可以通过出行链文件或二者的结合来定义交通需求。路网中要仿真的交通流定义为OD矩阵。一个OD矩阵中包含了给定时间间隔内每对 OD间的交通流量。运用动态交通分配的仿真可以定义多个OD矩阵,每一个OD矩阵中都包含有某一时间间隔、某一种交通构成条件下的交通需求信息,不同矩阵的时间间隔可以相同(在此之间必须先定义不同时间段的交通组成),路网内某一时刻的交通流量等于所有包含这一时刻在内的时间间隔所属OD矩阵的交通流量之和。
依次选择:Traffic→Dynamic Assignment,打开动态交通分配窗口,可编辑OD矩阵。
注意四点:
(1)OD矩阵中车辆的期望车速分布不是由矩阵定义的交通构成决定,而是由车辆起始的停车场定义的期望车速分布决定(所以定义停车场时定义各种车型期望速度),所以将停车场的期望速度设置为某种交通方式OD的期望速度,如小汽车OD期望速度为50(48-58)km/h,公交车25(20-30)km/h,货车25(20-30)km/h;
(2)用户无法在 VISSIM 用户界面中直接编辑 OD矩阵,但可以在存储矩阵的文本文档中用标准文字编辑器对其进行编辑;
(3)矩阵文件格式(*.FMA);
(4)OD矩阵可以分时间段输入,即不同时间段OD矩阵可以不一样。
Store costs:储存费用,进行下一次迭代之用;
Calculate and store paths:计算并储存路径,进行下一次迭代之用;
Kirchhoff 指数:控制流量分配到不同的路径;
例1:1000辆车从A到B,2条路径path2的费用是path 1的2倍,path2分到的交通量也是path1的2倍,如图所示。
Avoid Long Detours:避免长距离绕行;
例2:从A到B有2条路径,绕行系数:2.0,如图所示。
其余参数均可采用默认值。
搜索路径:迭代过程中要进行路径的搜索来供驾驶员选择另一条路径。
在每一个评估间隔内,都将进行一次路径搜索(除了第一次迭代计算);
每次搜索路径时,只搜索到一条最佳路径;
一条路径就是一连串通路(Edge)的组合;
初始状态时,所有的通路的费用均为0.1。这样设置的好处是:所有没有车辆通行的通路的费用非常有吸引力,因此初期的路径搜索时,可以找到更多的最佳路径,从而使得路径上的交通量可以很快地与实际情况相符合。
例3:有2个停车场,4个节点,11条通路,如图所示。
路径进行搜索的过程如图所示,经过4次迭代得出费用最小的路径。
此外,进行动态分配时也可以对连接器进行相应的设置(根据需要可以关闭某种车辆类型),如图所示。
2、OD矩阵文件的格式:
以星号(“*”)开头的行是注释内容,这里不再叙述。
第一个非注释内容行中有两个浮点数(hh.mm),分别以小时和分钟为单位显示矩
阵的时间间隔。例如:
1. 3表示的时间间隔是1小时3分钟(而不是1小时30分钟);
1.30表示的时间间隔是1小时30分钟;
1.50表示的时间间隔是1小时50分钟(而不是1小时30分钟)。
缩放比例系数,对矩阵进行整体缩放;
小区数目;
矩阵中使用的所有小区的编号;
交通流数据,即每一时间间隔的车辆总数(并不一定是每小时的车辆数)。
第一行是按照给定小区编号的顺序从第一个小区到其他所有小区的车辆数量,下一行是从第二个小区到其他所有小区的车辆数量,以此类推。
出行链文件一般不常用,这里不作介绍,有兴趣可参考有关说明书。
6.4动态分配实例
定义动态分配的步骤如下:
(1)创建路网,包括整个路网;
(2)添加节点,并进行相应的属性设置,对所需要评价的节点注释名称;
(3)按照所需添加停车场,替代交通小区;
(4)设置配套的属性设置。如信号灯、优先规则、减速区、停车标志,数据采集器等。
这些模块都很重要,都在模拟实际情况中的现象,如果不根据调查来进行相应的设置,会使仿真严重失真,这就失去了仿真的意义,并且这些模块可以对节点进行综合的评价,包括环境指标、排队长度等。其中在各条车道设置数据采集器可以采集到各个车道(或车道组)的流量,进行统计处理后,可以得到各条路段分方向的交通量,如果已经计算出路段的通行能力的话,就可以根据现状(目标年)OD得出路段的分方向的交通量除以路段通行能力,可以得出路段的饱和度,这样可以和TransCAD里得出的饱和度对比分析。
(5)进行动态分配属性参数的设置。Traffic→Dynamic Assignment→Matrices→new (Edit)→导入准备好的OD矩阵,根据所需情况对所需属性参数进行设置,如不需要设置的参数均采用默认值。
以下是针对自己所做交评项目的一个OD矩阵文件:时间为1小时(高峰小时),等级系数为1,交通小区数为16,区内出行量包括在内。
* time interval in hours
0.00 1.00
* scaling factor
1.0
* number of zone
16
* zones
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
*number of trips between zones
95 48 38 38 102 99 82 63 53 51 57 84 143 83 92 185
50 31 22 22 82 64 51 38 32 31 35 54 127 58 80 155
29 15 10 10 48 43 27 19 14 13 14 29 79 29 46 121
36 20 14 13 58 52 36 25 20 18 21 34 79 33 55 139
64 41 30 29 79 82 63 47 43 40 46 75 136 66 83 104
59 33 25 25 78 68 49 37 36 34 39 62 142 65 89 151
52 29 20 21 72 58 38 26 27 26 29 54 129 54 79 154
45 24 17 17 64 52 30 25 22 21 24 46 115 46 69 142
34 19 11 12 56 49 29 21 16 15 17 34 89 34 53 136
31 16 10 10 50 45 27 19 14 13 13 28 75 28 48 126
23 12 7 7 38 34 20 14 10 9 11 21 60 21 37 100
49 28 19 18 78 68 48 35 27 24 27 42 97 45 74 173
122 112 87 75 163 188 161 134 111 98 106 124 103 81 134 204
62 39 27 24 86 92 65 48 38 34 38 59 70 51 77 172
79 60 45 43 102 122 95 73 61 59 66 97 127 82 100 160
100 73 57 55 76 114 100 80 77 74 82 121 165 106 114 147
(6)节点评价、路网评价及其它属性的评价。在对整个路网进行动态仿真时,一般是针对整个路网或关键节点进行评价。
节点评价其操作为:Evulatio n→Files→Offline Analysis(Files),打开评价对话框。勾选 Node,点击filter出现如图对话框,根据需要对过滤器的属性参数进行编辑。
点击Configuration出现如图对话框,根据需要对配置的属性窗口的属性参数进行编辑。
路网评价其操作为:Evulatio n→Files→Offline Analysis(Files),打开评价对话框。勾选 Network Performance,点击filter出现如图对话框,根据需要对过滤器的属性参数进行编辑。
点击Configuration出现如图对话框,根据需要对配置的属性窗口的属性参数进行编辑。
注:可以根据自己的需要是否选择需要评价。如仅用于动态分配的Paths评价和Convergence 评价。其它辅助参数的评价根据自己是否需要而进行选择。不过这两项指标仅对高级人员使用,一般不对其进行评价。
路径评价其操作为:Evulatio n→Files→Offline Analysis(Files),打开评价对话框。勾选Paths,点击filter出现如图对话框,根据需要对过滤器的属性参数进行编辑。
点击Configuration出现如图对话框,根据需要对配置的属性窗口的属性参数进行编辑。