一阶线性时滞系统的模糊控制器仿真
一级直线倒立摆系统模糊控制器设计---实验指导书精讲
一级直线倒立摆系统模糊控制器设计---实验指导书精讲第一篇:一级直线倒立摆系统模糊控制器设计---实验指导书精讲一级直线倒立摆系统模糊控制器设计实验指导书目录实验要求........................................................................................................................... ...................3 1.1 实验准备........................................................................................................................... ................3 1.2 评分规则........................................................................................................................... ................3 1.3 实验报告内容........................................................................................................................... ........3 1.4 安全注意事项........................................................................................................................... ........3 2 倒立摆实验平台介绍..........................................................................................................................4 2.1 硬件组成........................................................................................................................... ................4 2.2 软件结构........................................................................................................................... ................4 3 倒立摆数学建模(预习内容)............................................................................................................6 4 模糊控制实验........................................................................................................................... ............8 4.1 模糊控制器设计(预习内容).......................................................................................................8 4.2 模糊控制器仿真........................................................................................................................... ...12 4.3 模糊控制器实时控制实验..............................................................................................................12 5 附录:控制理论中常用的MATLAB 函数.......................................................................................13 6 参考文献........................................................................................................................... .................14 实验要求1.1 实验准备实验准备是顺利完成实验内容的必要条件。
一阶倒立摆模糊控制实验报告

一阶倒立摆模糊控制实验报告本次实验旨在研究一阶倒立摆系统的模糊控制方法,通过对系统进行建模、设计控制器并进行仿真,最终评估控制效果。
实验过程主要包括系统建模、控制器设计、模糊控制器参数调节和性能评价四个步骤。
首先,我们对一阶倒立摆系统进行建模。
一阶倒立摆系统是一种具有非线性特性的控制系统,主要由电机、倒立摆、支撑杆等组成。
我们需要建立数学模型描述系统的动力学特性,包括倒立角度、倒立角速度、杆角度等状态变量,并考虑控制输入电压对系统的影响。
接着,我们设计模糊控制器。
模糊控制是一种基于模糊逻辑的控制方法,适用于非线性系统和模糊系统。
我们根据系统模型,设计模糊控制器的模糊规则、隶属函数等参数,以实现系统的稳定控制。
在设计过程中,我们需要考虑系统的性能指标,如超调量、稳态误差等。
第三步是模糊控制器参数调节。
通过仿真实验,我们可以对模糊控制器的参数进行调节,以使系统的性能达到最佳状态。
调节参数的过程需要考虑系统的稳定性、鲁棒性和响应速度,以达到控制效果的要求。
最后,我们对模糊控制系统进行性能评价。
通过对系统的响应曲线、稳定性、控制精度等指标进行分析,评价模糊控制器的控制效果。
我们可以比较模糊控制系统和传统控制系统的性能,探讨模糊控制在一阶倒立摆系统中的优势和局限性。
总的来说,本次实验通过研究一阶倒立摆系统的模糊控制方法,探讨了模糊控制在非线性系统中的应用。
通过实验,我们对模糊控制的基本原理和设计方法有了更深入的理解,同时也对一阶倒立摆系统的控制特性有了更清晰的认识。
希望通过实验的研究,能够为控制系统的设计和应用提供一定的参考和借鉴。
模糊控制器一阶线性时滞

项目一:一阶线性时滞系统的模糊控制器仿真
设计任务:针对一阶时滞系统,以模糊控制理论为基础利用Matlab的模糊逻辑工具箱设计常规模糊控制器,再通过Simulink环境中进行仿真。
一. 仿真工具介绍
1.模糊逻辑控制工具箱
2.利用S函数实现控制算法
二. 一阶线性时滞系统及其控制
1.一阶线性时滞系统
2.一阶线性时滞系统的PID控制(1)比例P调节
(2) 比例积分PI 调节
其对应传递函数为:)1
1()()()(s
T K s E s U s G i p +==
(3) 比例积分微分PID 调节
PID 调节器的传递函数为:)1
1()()()(s T s
T K s E s U s G d i p ++==
3. P ID 控制系统的参数整定
三. 一阶线性时滞系统的模糊控制
1.常规模糊控制器的设计
2.M atlab模糊工具箱设计模糊控制器
表4.1 49条模糊规则表
3.S imulink仿真及参数的调整
序列变成一个连续的阶梯信号。
框图下半部分为常规PID控制,由前面整定知识可算得整定的各项参数分别为Kp = 7.059, Ti = 1, Td = 0.25。
体仿真结果请根据以前基础知识自己在Matlab上仿真得出。
须提交报告,基本内容如下:
(1)试验过程;
(2)仿真模型框图;
(3)仿真结果。
(4)对模糊控制法与常规PID控制器的控制性能做出比较。
报告提交时间:11月5号周三上课时。
时滞系统Fuzzy-Smith控制的仿真研究

时滞系统Fuzzy-Smith控制的仿真研究
郝鹏飞
【期刊名称】《陕西科技大学学报(自然科学版)》
【年(卷),期】2008(26)5
【摘要】针对时滞对象,把Smith预估控制原理和模糊控制器结合起来,即在Smith预估控制系统中控制器采用模糊控制器.仿真结果表明,所采用的方法能有效克服普通模糊控制算法不适应时滞系统控制和常规Smith预估控制算法过分依赖模型精度的缺陷,提高普通模糊控制器对时滞系统的控制能力,同时该算法具有很强的鲁棒性和良好的控制品质.
【总页数】4页(P84-87)
【作者】郝鹏飞
【作者单位】陕西科技大学电气与信息工程学院,陕西,西安,710021
【正文语种】中文
【中图分类】TP273
【相关文献】
1.电机温度时滞耦合系统自抗扰控制仿真研究 [J], 廖金权
2.电机温度时滞耦合系统自抗扰控制仿真研究 [J], 陶荣;杜宏保
3.基于Fuzzy-Smith补偿控制的煤泥水自动加药系统仿真研究 [J], 王光辉;匡亚莉;王传真;申迎松
4.T-S模糊时滞模型在卡车拖车控制系统中的应用仿真研究 [J], 柳兴旺;巩诚;陈子健;邓劼;包新宇;;;;;
5.基于Fuzzy-Smith控制器的营养液pH值调控系统研究 [J], 李帅帅;李莉;穆永航;王宏康;吴勇;SIGRIMIS N
因版权原因,仅展示原文概要,查看原文内容请购买。
一阶倒立摆模糊控制matlab仿真
一阶倒立摆模糊控制仿真实验分析报告%mainclearclose all%load table.matglobal Table;global RULE;global UCenter;global Width;global num;global RuleMatch; %前件匹配方式0 取小;1乘积global Defuzzy; %反模糊化方法0: COG ; 1:COA; 2:MAXglobal g0;global g1;global h;x=[0.4,0,0];RuleMatch = 1; %前件匹配方式0 取小;1乘积Defuzzy = 0;%反模糊化方法0: COG ; 1:COA; 2:MAXg0=1.5;g1=0.1;h=1;% u=0;% Table = u;% [m,n]=size(u);% num = (m-1)/2;%u=[];RULE =[2, 2, 2, 1, 0; ...2, 2, 1, 0,-1;...2, 1, 0,-1,-2;...1, 0,-1,-2,-2;...0,-1,-2,-2,-2];%% RULE =[2,2,1,1,0; ...% 2,1,1,0,-1;...% 1,1,0,-1,-1;...% 1,0,-1,-1,-2;...% 0,-1,-1,-2,-2];RULE=RULE + 3*ones(size(RULE));%原始的%UCenter=[-20,-10,0,10,20];%改进的%UCenter=[-25,-15,0,15,25];UCenter=[-20,-15,0,15,20];Width(1)=(UCenter(5)-UCenter(4))/2;Width(2)=(UCenter(5)-UCenter(3));Width(3)=(UCenter(4)-UCenter(3))*2;Width(4)=Width(2);Width(5)=Width(1);x=x';[t,y]= ode45('P_Pendulum',[0,5],x);% [t,y]= ode45('P_Pendulum_tab',[0,10],x);% y2=y.*y;% inty = intnum(t,y2)%% int_e2 = inty(1)+inty(2);% int_u2 = inty(3);%int_y2 = sum(y.^2);%int_e2 = int_y2(1)+int_y2(2);%int_u2 = int_y2(3);figuresubplot(2,1,1)plot(t,y(:,1 ),'r',t,y(:,2),'k')%xlabel('t(sec)')% str1 = sprintf('x(0)=[%2.2f,%2.2f]',x(1),x(2)); % Title(str1,'Interpreter','latex','fontsize',14)%% str1=sprintf('t(sec)---index:$\\int{e^{T}(t)e(t)dt}=$ %f', int_e2);%str1 = '$\int{e^2}dt$'% text(6,0,str1,'Interpreter','latex','fontsize',14)%% xlabel(str1,'Interpreter','latex','fontsize',14)legend('x1(rad)', 'x2(rad/s)')title('输出隶属函数中心值:[-20,-15,0,15,20]')subplot(2,1,2)plot(t,y(:,3),'r')xlabel('t(sec)')ylabel('u(N)')% str1=sprintf('t(sec)--index:$\\int{u^{2}(t)dt}$= %f', int_u2);% %H = Title(str1,'Interpreter','latex','fontsize',14)% xlabel(str1,'Interpreter','latex','fontsize',14)% inverted pendulum stabilized% program on 2006,10,26function xdot = P_Pendulum(t,x)global RULE;global UCenter;global step;global k;global Kc;global QQ;global Width;global RuleMatch; %前件匹配方式0 取小;1乘积global Defuzzy; %反模糊化方法0: COG ; 1:COA; 2:MAXglobal g0;global g1;global h;M = 1;m =0.5;g = 9.8;l = 0.5;a = 1/(m+M);%计算隶属度mu_e= emembershipdegree(-x(1)*g0);mu_de = demembershipdegree(-x(2)*g1);%pausemu_e_id = find(mu_e>0);mu_de_id = find(mu_de>0);eLen= length(mu_e_id);deLen = length(mu_de_id);mu_pre= zeros(1,4);fuzzy_out = zeros(1,4);weight = zeros(1,4);in =1;%规则匹配for (i=1:eLen)for(j=1:deLen)switch RuleMatchcase 0%前件采用取小推理mu_pre(in)= min(mu_e(mu_e_id(i)),mu_de(mu_de_id(j)));case 1%前件采用乘积推理mu_pre(in)= mu_e(mu_e_id(i))*mu_de(mu_de_id(j));end%计算规则匹配度fuzzy_out(in) = RULE(mu_e_id(i),mu_de_id(j));in=in+1;endendnRule = eLen *deLen;u = 0;summu =0;%反模糊化for(i=1:nRule)switch Defuzzycase 0%按照重心法计算(COG)weight(i)= Width(fuzzy_out(i))*(mu_pre(i)-mu_pre(i)*mu_pre(i)/2);case 1% 按照中心平均法weight(i)=mu_pre(i);case 2% 取大法(大中求中)[max_v,max_id] = max(mu_pre);weight(max_id)=1;endu = weight(i)*UCenter(fuzzy_out(i))+u;summu =summu + weight(i);end%u=0;u=h*u/summu;if (u>20)u=20;endif (u<-20)u=-20;endt% if(t>2.5 && t<2.6 )% u=u+20;% end% if (u>20)% u=20;% end%% if (u<-20)% u=-20;% end% xdot(1)=x(2);% xdot(2)=(g*sin(x(1))-a*m*l*x(2)*x(2)*sin(2*x(1))/2-a*cos(x(1))*x(3))/(4*l/3-a*m*l*cos(x(1))*cos(x(1))); % xdot(3)=-100*x(3)+100*u;% x(3) = u;xdot(1)=x(2);xdot(2)=(g*sin(x(1))-a*m*l*x(2)*x(2)*sin(2*x(1))/2-a*cos(x(1))*x(3))/(4*l/3-a*m*l*cos(x(1))*cos(x(1))); xdot(3)=-100*x(3)+100*u;xdot = xdot';y=zeros(1,5);if (x<= -pi/2)y(1) =1 ;elseif (x<=-pi/4)y(1) = abs(x+pi/4)/(pi/4);y(2) = 1-abs(x+pi/4)/(pi/4); elseif (x<= 0)y(2) = 1-abs(x+pi/4)/(pi/4);y(3) = 1- abs(x)/(pi/4);elseif (x<=pi/4)y(3) = 1- abs(x)/(pi/4);y(4) = 1-abs(x-pi/4)/(pi/4); elseif (x<=pi/2)y(4) = 1-abs(x-pi/4)/(pi/4);y(5) = abs(x-pi/4)/(pi/4);elseif (x>pi/2)y(5) =1;endfunction y = demembershipdegree(x) y=zeros(1,5);if (x<= -pi/4)y(1) =1 ;elseif (x<=-pi/8)y(1) = abs(x+pi/8)/(pi/8);y(2) = 1-abs(x+pi/8)/(pi/8); elseif (x<= 0)y(2) = 1-abs(x+pi/8)/(pi/8);y(3) = 1- abs(x)/(pi/8);elseif (x<=pi/8)y(3) = 1- abs(x)/(pi/8);y(4) = 1-abs(x-pi/8)/(pi/8); elseif (x<=pi/4)y(4) = 1-abs(x-pi/8)/(pi/8);y(5) = abs(x-pi/8)/(pi/8);elseif (x>pi/4)y(5) =1;endy=zeros(1,5); if (x<= -30) y(1) =0 ; elseif (x<=-20)y(1) = 1-abs(x+20)/(10); elseif (x<=-10)y(1) = 1-abs(x+20)/(10); y(2) = 1-abs(x+10)/(10); elseif (x<= 0)y(2) = 1-abs(x+10)/(10); y(3) = 1- abs(x)/(10); elseif (x<=10)y(3) = 1- abs(x)/(10); y(4) = 1-abs(x-10)/(10); elseif (x<=20)y(4) = 1-abs(x-10)/(10); y (5) = 1-abs(x-20)/(10); elseif (x>30) elseif (x<=30)y(5) = 1-abs(x-20)/(10); elseif (x>30) y(5) =0; end不同的推理方式,反模糊化方法初始值:x0=[0.1 0]’t(sec)u (N )t(sec)u (N )t(sec)u (N )t(sec)u (N )t(sec)u (N )t(sec)u (N )不同的初始条件前件隶属度函数计算方法:乘积模糊蕴含关系计算方法:取小 反模糊化方法:COGt(sec)u (N )t(sec)u (N )t(sec)u (N )t(sec)u (N )结论:当初始角达到一定程度时,控制力趋向饱和,系统不稳定。
模糊控制系统课件4.5(模糊控制系统的设计与仿真)
面。
在图5.22中,在Workspace variable栏内填入fzy1,单击 OK按钮。这样就将模糊推理系统FIS所构建的参数传递给模 糊推理系统仿真编辑图形化窗口中名称为fzy1的Fuzzy Logic Controller。
图5.22 Fuzzy Logic Controller参数传递
4.5.3 模糊控制系统仿真
Simulink基本模块库包含的是最基本的仿真模块,是
MATLAB仿真建模的基础。每一个模块在使用时都需要设 定一些相关参数,一般可以在模型编辑窗口双击该模块,然 后在相应的弹出对话框里来设定这些参数。用右键单击模块 图标,还可以在弹出的菜单里选择相关操作。
2. Simulink Extras扩展模块库
图5.27 建立控制规则
图5.28 模糊推理系统输出面
5.3.2 建立Simulink仿真编辑环境
在MATLAB命令窗口中单击Simulink图标,激活仿真模 块库,根据5.2节所讲的步骤,建立仿真模型编辑环境窗口, 将仿真所需要的模块用鼠标拖入其中并连接好,如图5.29所 示。这里只讲解模糊控制系统的仿真方法,模块参数选择较 粗糙(调整参数的方法可参阅5.3节的内容)。仿真系统中,模 糊控制器的输出采用增量式输出,系统给定值h=2 m,水箱 数学模型为
图5.20 模糊推理系统仿真系统编辑窗口
图5.21 设定模糊逻辑控制器的名称
将在模糊推理系统仿真界面中建立的模糊推理系统fzy1
打开。操作步骤如下:在MATLAB命令窗口中输入命令 fuzzy→Enter,出现FIS Edit编辑器画面,单击File→Import →From Disk,打开5.1节所建立的模糊推理系统fzy1.fis; 接 着单击File→Export→To Workspace,打开如图5.22所示的界
时滞系统模糊整定PID控制的仿真研究

wt b n l r n eitn l dute ts c al PDcnr l aat tn . h z ot lr s ei e i adft dt e a ajs n i at l I ot l r re r e igT ef z cnr l s nd h ie a h n r m u y oe p e st uy oeid g
维普资讯
第2 卷 第1期 3 1
文章编 : 0 — 3 8 20 ) 1 0 1 — 4 1 6 94 ( 06 1 — 2 1 0 0
计 算
机 仿
真
26 0 年1月 0 1
时滞 系统 模 糊 整 定 P D控 制 的仿 真研 究 I
赵 鑫 刘 红 军 王 军 胡 丽红 , , ,
1 引言
在 工业 过程控 制领 域 , 由于被 控 对 象过 程机 理 的 复杂 性, 常会遇到时滞现象 。这种现象 的存 在导致 系统 动态误差 增大 , 稳定裕度 减小 , 系统 特性恶 化。时滞 问题 一直是 控制 领域的难题 。 目前针对时 滞过 程的控制 方法很 多… , 比较有 效并得 到广泛运 用的 内模 控制 , 有较好 的跟踪 特性 , 具 较 强的抗 干扰能力 和一 定 的鲁棒性 能。但 当被控 对象模 型失 配较大时 , 控制 系统 特性 会随之 恶化 , 节性能 变差甚 至会 调 导致系统的不稳定 。因此采 用常规 的 内模控 制无法很 好解 决时滞系统变化带来的问题 。 本文引入 l l ae / pd 级数逼近 纯滞后 环节 , 内模控制 将 系统转换为常规 PD单位反馈控制 系统 , I 然后运 用模糊理论 整定 PD参数 , I 实现模 糊整定 PD内模 控制 , I 它充 分综合 了
,
模糊控制器的设计与仿真
以上模 糊 控制 规则 共计 2 5条 , 这些 控 制规则 可 以总结 归 纳成表 .
表 1 模糊 控 制规 则表
3 建立模糊控制系统 的仿真模 型
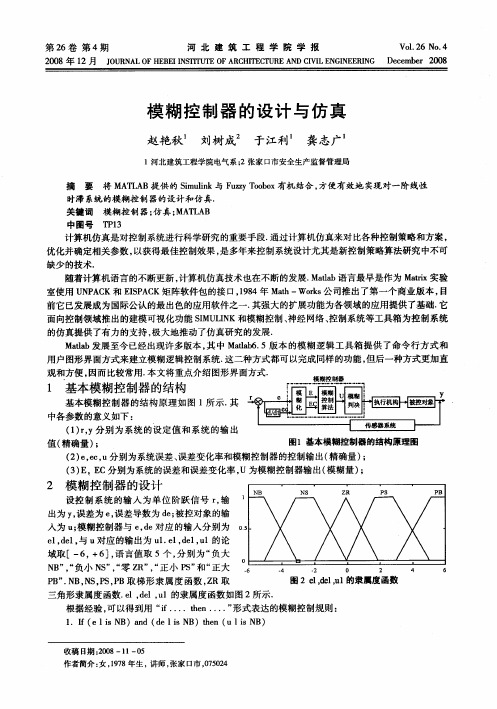
1 基本模糊控制器 的结构
基本 模糊控 制 器 的结 构原 理 如 图 1 示 . 所 其 中各 参数 的意 义如 下 :
( ), 分别 为系统 的设定值和系统的输 出 1 rY 值( 精确量 ) ;
图1基本模糊控制器 的结构原理图
( ) ,cu分 别为 系统误 差 、 2 ee , 误差变 化率 和模糊 控制 器 的控制输 出( 精确量 ) ;
e ,e , U ld1与 对应的输 出为 u .ldlu 1e ,e ,l的论 域取[ 6 + ] 语言值取 5个 , 一 , 6, 分别为 “ 负大
N ”,负小 N ” “ Z , 正 小 P ” “ 大 B “ S ,零 R” “ s和 正 P ” N N ,SP B . B,S P ,B取 梯 形 隶 属度 函数 ,R取 Z 三角形 隶属 度 函数.l,e u e dl,l的隶属度 函数 如 图 2所示 .
第2 6卷 第
V 12 o4 o.6N .
20 0 8年 1 J U N L FH B IN TT T F R HT C U EA DCVLE GN E IG D cm e 2 0 2月 O R A E E SIU EO C I T R N II N IE RN ee b r 0 8 O I A E
1
这 里取被 控对 象 为 : s H( )=
二 S 十
e
1
基于Matlab的模糊控制器设计及仿真_殷云华
本文利用 Matlab 的模糊逻辑工具箱( Fuzzy Logic) 设计模糊控制器, 并用 Matlab 提供的 Simulink 进
表 1 模糊控制规则表 Table 1 Fuzzy control rule table
( 1. Nat ional Key Laboratory for Electronic Measurement Technolongy, North University of China, Taiyuan 030051, China; 2. China North Aut omatic Control Technology Institute, Taiyuan 030051, China;
对于一阶线性时滞系统来说有时就达不到快速性的要求教授创立了模糊集合理论1974年英国的e1h1m2amdani研制出第一个模糊控制器需要了解对象的精确数学模型根据专家知识进行控制用模糊控制器来实现对一阶线性时滞系统的控制大大改进了原系统的控制效果在一定程度上满足了系统快速性的要求清楚地显示出改进的控制效果
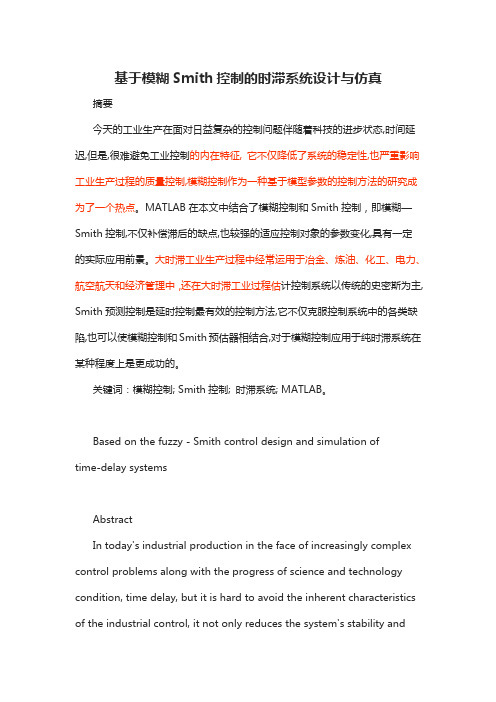
# 490 # 统的仿真结构, 如图 5 所示。
控制工程
第 14 卷
图 5 模糊控制系统仿真框图
Fig15 Simulation block diagram of fuzzy control system
如果仿真的控制效果不满意, 一般首先调整比 [ - 6, 6] , 其作用是把控制系统的误差和误差变化由
静态特性, 使系统获得了良好的控制性能, 具有较好的应用价值。
关 键 词: Matlab; 模糊控制器 ; Simulink
中图分类号: TP 273
基于模糊Smith控制的时滞系统设计与仿真
基于模糊Smith控制的时滞系统设计与仿真摘要今天的工业生产在面对日益复杂的控制问题伴随着科技的进步状态,时间延迟,但是,很难避免工业控制的内在特征, 它不仅降低了系统的稳定性,也严重影响工业生产过程的质量控制,模糊控制作为一种基于模型参数的控制方法的研究成为了一个热点。
MATLAB在本文中结合了模糊控制和Smith控制,即模糊—Smith控制,不仅补偿滞后的缺点,也较强的适应控制对象的参数变化,具有一定的实际应用前景。
大时滞工业生产过程中经常运用于冶金、炼油、化工、电力、航空航天和经济管理中,还在大时滞工业过程估计控制系统以传统的史密斯为主, Smith预测控制是延时控制最有效的控制方法,它不仅克服控制系统中的各类缺陷,也可以使模糊控制和Smith预估器相结合,对于模糊控制应用于纯时滞系统在某种程度上是更成功的。
关键词:模糊控制; Smith控制; 时滞系统; MATLAB。
Based on the fuzzy - Smith control design and simulation oftime-delay systemsAbstractIn today's industrial production in the face of increasingly complex control problems along with the progress of science and technology condition, time delay, but it is hard to avoid the inherent characteristics of the industrial control, it not only reduces the system's stability andserious influence the industrial process control 's quality , fuzzy control, as a kind of control method based on model parameters become a hot spot of research. MATLAB in this paper combines fuzzy control and control become blurred - Smith. Smith control, not only compensate the disadvantage of lag, and to adapt to changes in the parameters of the controlled object, has a certain practical application prospect. Large time delay is often used in the process of industrial chemical, oil refining, metallurgy, electric power, aerospace, economic management and traffic system. Also in large industrial processes with time-delay estimation control system is given priority to with the traditional Smith, Smith predictive control is the most classical and most mature time delay control method, it not only make the set value input zero steady-state error and external disturbance, also can be combined with fuzzy control and Smith estimatesKey words: Fuzzy Control; Matlab; Delays; Smith control 目录摘要ⅠAbstract Ⅱ目录Ⅲ1引言11.1选题的背景及意义12绪论22.1 研究的内容及方法22.2研究的可行性22.3研究的目标及意义43模糊-Smith控制43.1时滞53.2模糊控制53.3 Smith控制63.4史密斯(Smith)预估器73.5模糊-Smith控制94 MATLAB软件仿真134.1 MATLAB与其特点134.2模糊-Smith控制的MATLAB仿真134.3仿真结果分析185结论19参考文献19致谢201引言1.1选题的背景及意义对于今天的工业生产在面对日益复杂的控制问题伴随着科技的进步状态,时间延迟,但是,很难避免工业控制的内在特征, 它不仅降低了系统的稳定性,也严重影响工业生产过程的质量控制,模糊控制作为一种基于模型参数的控制方法的研究成为了一个热点。
模糊控制仿真实验设计

模糊控制系统的仿真实验实验目的:现有被控对象一:G(s)=1/(s2+2s+1)被控对象二:G(s)=K /【(T1s+1)(T2s+1) 】试设计一个模糊控制系统来实现对它的控制,并完成以下任务:任务一:通过仿真分析模糊控制器的参数的变化(主要讨论控制器解模方法和量化因子的变化)对系统性能的影响。
任务二:在控制器参数一定的情况下改变被控对象的参数,分析对象参数变化时fuzzy controller的适应能力。
任务三:在控制器参数一定的情况下改变被控对象的结构,分析对象结构变化时fuzzy controller的适应能力。
实验分析:要完成以上任务应分两个步骤:一设计模糊控制器,二用matlab的模糊逻辑工具箱建立模糊推理系统,并在simulink中实现对模糊系统的仿真。
接下来就以对象一为例说明模糊控制系统的仿真。
一、模糊控制器的设计模糊控制器的设计步骤为:1、选择控制器的输入输出:选择误差e及误差变化量ec为输入,u作为输出用于控制对象,这样模糊控制器具有二输入一输出的结构。
2、模糊集及论域的定义:z输入e的模糊子集为{NB NM NS NO PO PS PM PB}z输入ec和输出u的模糊子集均为{NB NM NS ZO PS PM PB}z e的论域为{-6 -5 -4 -3 -2 -1 -0 +0 1 2 3 4 5 6 }z ec的论域为{-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 }z u的论域为{-7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 }我们选择三角形作为隶属度函数的形状,e的隶属度函数如下图所示:图1-1 ec的隶属度函数如下图所示:图1-2 u的隶属度函数如下图所示图1-3表1-14、选择输入输出变量的量化因子:这里暂时选定输入输出的量化因子Ke=Kc=Ku=1,接下来的仿真过程还可以调整。
5、择模糊规则前提交的方法为min,模糊推理方法为min,而反模糊化方法可以在仿真过程中设置。
基于模糊控制一阶倒立摆控制与仿真

基于模糊控制一阶倒立摆控制与仿真简介本文将介绍一种基于模糊控制的一阶倒立摆控制方法,并进行仿真实验。
倒立摆是一个常用的控制理论问题,它涉及到控制一个无人机或机器人,使其保持平衡。
模糊控制模糊控制是一种基于模糊逻辑的控制方法。
它通过将输入变量和输出变量模糊化,使用一组模糊规则来产生控制信号,从而实现系统的控制。
在倒立摆控制中,模糊控制可以帮助我们根据当前倾斜角度和角速度来调整控制信号,以使倒立摆保持平衡。
一阶倒立摆模型一阶倒立摆是一个简化的倒立摆模型。
它由一个质点和一个可动的杆组成。
质点位于杆的底部,而杆通过一个铰链连接到一个支撑平面。
倒立摆的目标是使杆保持垂直位置。
模糊控制器设计模糊控制器由三个部分组成:模糊化、模糊推理和解模糊化。
在倒立摆控制中,我们需要模糊化输入变量(倾斜角度和角速度),并定义一组模糊规则来确定控制信号。
然后,通过运用模糊推理,我们可以根据当前的模糊规则和输入变量得到一个模糊输出。
最后,使用解模糊化方法将模糊输出转化为具体的控制信号。
仿真实验为了验证模糊控制方法的有效性,我们进行了一系列的仿真实验。
在实验中,我们使用了一阶倒立摆的数学模型,并将模糊控制器应用于这个模型。
通过调整模糊规则和输入变量,我们可以观察到一阶倒立摆的响应和稳定性。
结论本文介绍了一种基于模糊控制的一阶倒立摆控制方法,并进行了仿真实验。
模糊控制是一种有效的控制方法,可以帮助倒立摆保持平衡。
通过模糊控制器的设计和调整,我们可以实现对倒立摆的精确控制。
在实际应用中,模糊控制还有许多其他的应用领域,具有很高的潜力和发展空间。
参考文献:。
直线一级倒立摆模糊控制算法的设计与仿真

模糊控制算法的设计与仿真4.1 模糊控制理论研究的历史、背景与现状模糊理论是由美国著名控制论学者Lotfi A.Zadeh于1965年在名为“模糊集合”(《Fuzzy sets》)(Zadeh【1965】)的开创性文章中创立的。
Zadeh教授早在20世纪60年代初期认为经典控制论过于强调精确性而无法处理复杂的系统,他认为“在处理生物系统时,需要一种彻底不同的数学——关于模糊量的数学,该数学不能用概率分布来描述”。
后来,他将这些思想正式形成文章“模糊集合”。
模糊理论的大多数基本概念都是由Zadeh在02世纪60年代末07年代初提出来的。
他在1965年提出模糊集合后,又在1968年提出模糊算法的概念(Zadeh【1968】),在1970年提出模糊决策(Bellman和Zadeh【1970】),在1971年提出了模糊排序(Zadeh【1971】)。
1973年他发表了另一篇开创性文章《分析复杂系统和决策过程的新方法纲要》,该文建立了研究模糊控制的基础理论,在引入语言变量这一概念的基础上,提出了用模糊IF-THEN 规则来量化人类知识。
20世纪70年代的一个重大事件就是诞生了处理实际系统的模糊控制器。
在1975年,Mamdani和Assilian 创立了模糊控制器的基本框架,并将模糊控制器用于控制蒸汽机。
他们的研究成果发表在文章《带有模糊逻辑控制器的语言合成实验》(Mamdani和Assilian【1975】)中,这是关于模糊理论的另一篇具有开创性的文章。
他们发现模糊控制器非常易于构造且运作效果较好。
后来,在1978年,Holmblad和Ostergaard为整个工业过程开发出了第一个模糊控制器-模糊水泥窑控制器。
1980年,Sugeno。
开创了日本的首次模糊应用——控制一家富士(Fuji)电子水净化工厂。
1983年,他又开始研究模糊机器人,这种机器人能够根据呼唤命令来自动控制汽车的停放(Sugeno和Nishicla[1985])。
模糊控制器一阶线性时滞

项目一:一阶线性时滞系统的模糊控制器仿真设计任务:针对一阶时滞系统,以模糊控制理论为基础利用Matlab的模糊逻辑工具箱设计常规模糊控制器,再通过Simulink环境中进行仿真。
一.仿真工具介绍1.模糊逻辑控制工具箱Matlab模糊逻辑工具箱是数字计算机环境下的函数集成体「口J以利用它所捉供的工具在Matlab框架卜设计、建立以及测试模糊推理系统,结合Simulink, 还可以对模糊系统琏行模拟仍真•也可以编写独立的C语言程序来调用Matlab 屮所涉及的模糊系统*对F—些简单的应用,Mathb模糊逻辑「匚具箱提供了图形用户界面(GUI)帮助使用者方便、快速地完成工作。
当然’如果憾意的话,这些工作也可以通过命令行语句或耆程序来完成。
这个工具箱提供了三种类型的工具;命令行彌数、图形交互工具以及仿真模块和实例。
第一类匚具是由披称作命令行的两数或者用户自己编写的两数构成的.通常这些函数以Matlab的胆文件存放,以实现特定的模糊逻辑算法°读者可以打幵这些文件观看这些函数的Matlab源代码,也可以通过修改文件來改变函数的功能,还可以通过编写白己的刚文件来扩展工具箱的功能。
由于Matlab 语言的灵活性以及系统函数所要求的运算广泛适应性,一般不建议用户直接修改系统所提供函数的源代码,而应当将新编的或改动的函数以不同于系统函数的名称存盘.第二类工具是一系列图形交互工具(GUIh方便用户通过图形用户界面访问工具箱函数.通过GU】,用户可以简单快速地实现设计好的模糊逻辑推理系统,井进行计算、测试以及修改工作。
简言之’图形用户界面的工具提供了…个设计"分析、应用模糊推理系统的环境。
第三类工具是工具箱与Matlab的仿真坏境Simulink的一系列接口模糊逻辑模块。
这樂接口模块是为了在Simulink环境下进行快速模糊逻辑推理的模拟仿宜而特别设计的,利用这些模块,可以方便地熔用第一类和第二类工具编辑的模糊逻辑模型直接导入到仿真环境中进行模拟.Matlab中自带了模糊逻辑工具箱(Fuzzy Logic Toolbox),这个工具箱提供了模糊逻辑控制器及系统设计的各种途径口工具箱提供了生成和编辑模糊推理系统(FIS)常用的I一具函数1 如newfis^ addvar. addrule, sctfis^ writefis 等匚它包括了产生新的FIJ给聒加入变量*隶屈函数、规则、设詈解模糊方法及存储F【S等功能,用户可以用命令调用这些函数的方式生成和編辑模糊推理系统。
模糊控制系统仿真
图二:系统未经过模糊控制后的输出:
图三:模糊控制器的输入:
图四:模糊控制器的输出:
实验结果分析:由上图可知加入模糊控制后是的一阶系统的调节时间变长了。由于模糊规则划分的不是很细,而且,初学对于控制规则的掌握不是很深,导致加入模糊控制后使调节时间变长:
3.e,de和u语言变量的选取
e7个:NB,NM,NS,ZERO,PS,PM,PB
ec7个:NB,NM,NS,ZERO,PS,PM,PB
U 7个:NB,NM,NS,ZERO,PS,PM,PB
4.模糊规则确定
e
ec
NB
NM
NS
ZERO
PS
PM
PB
NB
NB
NB
NB
NB
NM
NS
ZERO
NM
NB
NB
NM
NM
5.隐含和推理方法的制定
•隐含采用‘mamdani’方法: ‘max-min‘
•推理方法,即‘min‘方法
•去模糊方法:重心法。
•选择隶属函数的形式:三角型
三.实验步骤
1.建立fuzzy(fis)文件。
(1)在主窗口输入fuzzy,显示如下图所示
(2)选择Edit Add Variable Input,增加一个输入,使之成为两输入一输出。
六.实验中遇到的问题
(1)输出的稳态误差非常大。原因:一些参数设置不合理
(2)输出后一直不能稳定。原因:模糊规则出错
(3)输出后震荡很厉害。原因:加入的一阶保持系统参数设置太大
(4)由于不能熟悉掌握matlab的仿真功能,而导致不能导入模糊控制器,及时间出错等问题。
智能控制实验报告
一阶系统模糊控制器的仿真研究

学号:1108211038本科毕业论文(设计)( 2013 届)一阶系统模糊控制器的仿真研究院系电子信息工程学院专业电子信息工程姓名田雷指导教师吴剑威讲师2013年5月随着模糊控制技术的广泛应用,特别是在那些复杂的、非线性、不确定性、多变性的大系统中。
模糊控制技术越来越受到人们的关注并且不断发展。
近年来,模糊控制技术也是控制领域的研究热点。
模糊控制器建立的关键是模糊控制规则及隶属度函数的建立,他们的确定对输出控制的结果产生很大的影响。
模糊控制作为一种智能控制技术,它是根据专家经验和熟练操作人员经验并以模糊数学、模糊语言以及模糊规则和推理为理论基础,其可以在不建立对象数学框架的前提下根据人类的思维方式和推理过程实现对被控制对象较精确的控制。
时至今日,模糊控制凭借其智能化水平高、控制过程简单且易实现等特点,显示出巨大的发展潜力和实用价值,在很多领域都获得了完美的应用和发展。
本论文通过模糊控制器对一阶系统进行仿真分析。
首先介绍了模糊控制系统的现状和发展趋势以及基本结构和实现方法,然后介绍了模糊工具箱的基本功能和应用,最后对一阶系统进行仿真分析。
仿真过程是创建一个一阶系统,确定变量和隶属度函数,用MATLAB 命令编程设计模糊控制器,用图形用户界面(GUI)建立模糊推理器(FIS)以及模糊规则,在Simulink中建立模糊控制系统的模型并进行仿真。
关键词:模糊控制;隶属度;Simulink;一阶系统With the widely application of the fuzzy control technology, especially in the complex, nonlinear, uncertainty and variability of large system, fuzzy control technology is more and more getting the attention of people and continuous development. In recent years, the focus of recent research is in the field of fuzzy control technology. Fuzzy controller is the key to the establishment of the fuzzy control rules and membership functions, the results of their determination to control the output produce very big effect.Fuzzy control technology is an intelligent control technique, which is based on the experience of experts and skilled operators experience and fuzzy mathematics, fuzzy language and fuzzy rules and reasoning as the theoretical foundation, it can be in the premise of not establish the mathematical framework based on human thinking and reasoning process to achieve the control of the control object precisely. Today, the fuzzy control with its high intelligent level, the control characteristics of the process of simple and easy to achieve, shows great potential for development and practical value, in many areas have gained the application and development of perfect.In this paper was carried out on the first order system by fuzzy controller simulation analysis. First introduced the present situation and development trend of fuzzy control system and the basic structure and implementation method, and then introduced the basic function and application of the fuzzy toolbox, the simulation analysis was carried out on the first order system. Simulation process is to create a first-order system, determine the variables and the membership functions, MATLAB command programming design of fuzzy controller, with a graphical user interface (GUI) based fuzzy reasoning (FIS) and the fuzzy rules and fuzzy control system model is established in Simulink and the simulation.Keywords: Fuzzy Control; Membership; Simulink; first order system目录摘要 (I)ABSTRACT (II)目录 (III)1 绪论 (1)1.1 课题的研究背景及意义 (1)1.2 国内外研究现状 (1)1.3 模糊控制的发展趋势及存在的问题 (2)2 模糊控制的基本原理 (2)2.1 模糊控制理论基本概念 (3)2.2 模糊控制系统 (4)2.3 模糊控制器 (6)3 MATLAB及模糊工具箱 (9)3.1 MATLAB简介 (9)3.2 模糊工具箱 (10)3.3 Simulink介绍 (14)4 一阶系统模糊控制器设计及仿真 (16)4.1 一阶系统 (16)4.2 模糊控制器的设计 (18)4.3 利用Simulink建立模糊控制系统模型并仿真 (26)5 总结与展望 (27)5.1 总结 (27)5.2 展望 (28)参考文献 (29)1绪论1.1 课题的研究背景及意义在当今社会科技迅速发展的前提下,现代工业变得越来越规模化、自动化、生产过程也越来越复杂化,家用电器等很多控制对象日益变得复杂。
时滞系统的双自由度Smith模糊PID控制器设计与仿真
时滞系统的双自由度Smith模糊PID控制器设计与仿真孙立强;郑恩让【摘要】Smith fuzzy PID control was applied to time-delay system .Adding double-freedom parameters at controller ’ s input end can reduce both maximum overshoot and accommodation time of the system dynamic re-sponse and can enhance anti-jamming capability;improving fuzzy PID controller ’ s structure can decrease the difficulty in parameterssetting .Simulation result proves the effectiveness of the algorithm designed .%针对大时滞系统采用Smith模糊PID算法控制,在控制器的输入端加入给定双自由度调节参数,有效地减小系统动态响应的最大超调量和调节时间,增强系统的抗干扰能力。
通过改进模糊PID控制器结构解决控制器参数耦合的问题,降低了参数整定的难度。
仿真研究验证所设计算法的有效性。
【期刊名称】《化工自动化及仪表》【年(卷),期】2014(000)005【总页数】4页(P486-488,523)【关键词】Smith模糊PID控制器;双自由度;时滞系统【作者】孙立强;郑恩让【作者单位】陕西科技大学电气与信息工程学院,西安 710021;陕西科技大学电气与信息工程学院,西安 710021【正文语种】中文【中图分类】TH865模糊PID控制器是传统的PID控制与模糊控制相结合形成的一种智能控制器,它融合了PID控制器不依赖对象数学模型及模糊控制器良好的知识表达能力等优点[1],合理地设置控制器的参数能够对大时滞过程取得理想的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
)11()()()(s T s T Kp s E s U s G d i ++==
s
e s s G 5.01101)(−+=一阶线性时滞系统的模糊控制器仿真
一、一阶线性系统的PID 控制
PID 调节器的传递函数为:,现假设被控对象为:,根据“稳定边界法”即临界比例度法,来
整定调节器的参数,带入“稳定边界法整定参数计算表”得到,当采取P 调节时,KP=16,;当采取PI 调节时,KP=14.545,i T =1.7;当采取PID 调节时,KP=18.824,i T =1,d T =0.25。
通过Simulink 进行如图1
所示的仿真:
图1
各调节器的参数如上所设置。
由于在MATLAB 中的PID 为离散类别的,而实际需要的为连续的,故需要先创建一个连续PID 控制子系统,并进行封装。
子系统如图2所示:
图2
在此基础上,将子系统封装成PID调节器,如图3所示的模块。
将此模块拖入至系统仿真图中,保存并运行.
仿真结果如图4所示:
图4
二、一阶线性系统的模糊控制
用MATLAB模糊工具箱建立模糊控制器的具体过程如下:
1、在Matlab的命令窗口(command window)中输入fuzzy,回车就会弹出这样一个窗口,在此窗口中对模糊控制器进行相关的设计。
2、确定模糊控制器结构:即根据具体的系统确定输入、输出量。
这里我们选取标准的二维控制结构,即输入为误差e和误差变化ec,输出为控制u。
这里的变量都是精确量。
相应的模糊量为E,EC和U,我们可以选择增加输入(Add Variable)来实现双入单出控制结构。
3、输入输出变量模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。
首先要确定描述输入输出变量语言值的模糊子集{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,例如我们可以设置误差E(此时为模糊量)、误差变化EC、控制量U的论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},然后为模糊语言变量选取相应的隶属度函数。
在Member Function Edit中即可完成这些步骤。
然后分别对输入输出变量定义论域范围,添加隶属函数,以E为例,设置论域范围为[-66],添加隶属函数的个数为7。
然后根据设计要求分别对这些隶属函数进行修改,包括语言变量,隶属函数类型。
4、模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。
确定专家经验为模糊规则,对于二维控制结构以及相应的输入模糊集,我们可以制定49条模糊控制规则。
在Rule Editor中输入49条规则。
制定完规则之后,点击view —surface ,可以看到一张图:
5、对输出模糊量的解模糊:模糊控制器的输出量是一个模糊集合,通过反模糊化方法判决出一个确切的精确量,模糊化方法这里选取重心法。
6、命名该FIS文件并存盘。
Explor to disk--to file or to workspace 。
现有一个一阶滞后系统,其传递函数为:s e s s G 5.01
31)(−+=
,仿真框图如下图所示。
常规PID 控制部分的各整定参数分别为:Kp=7.059,i T =1,25.0=d T 。
三个限幅器中,前两个取[-6,6],主要作用是把误差e 和误差变化率ec 由基
本论域变换到模糊控制域中,后一个取[-20,20],主要是为了限制模糊控制器的最大输出。
零阶保持器的作用的把一个脉冲序列变成一个连续的阶梯信号。
在图中的FuzzyLogic模块中双击,添加所用模糊控制器的名称(即前面我们所保存的模糊控制器)。
运行后得到结果:
三、模糊控制法与常规PID控制器的控制性能比较
由仿真结果可以得知,常规PID控制和模糊控制对于系统的各项性能指标都有了改善,但模糊PID比常规PID的超调量要小一些。
常规PID方法具有一定的局限性:当控制对象不同时,控制器的参数难以自动调整以适应外界环境的变化,尤其在控制对象有很大的时变和非线性的情况下。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用模糊控制理论的方法。
通过MATLAB模糊工具箱建立模糊控制器,可以设置不同的论域和语言值,建立不同形式的隶属度函数,及根据实际经验和分析而得出模糊规则表。
选择合适的隶属度函数、论域和语言值、模糊规则表及控制器的结构,能够实现对系统的超调量、上升时间、过渡时间及稳定性等各性能指标的最优控制。
把常规PID控制和模糊控制理论相结合,可实现更好的控制效果。