人工神经网络
人工神经网络与应用课程
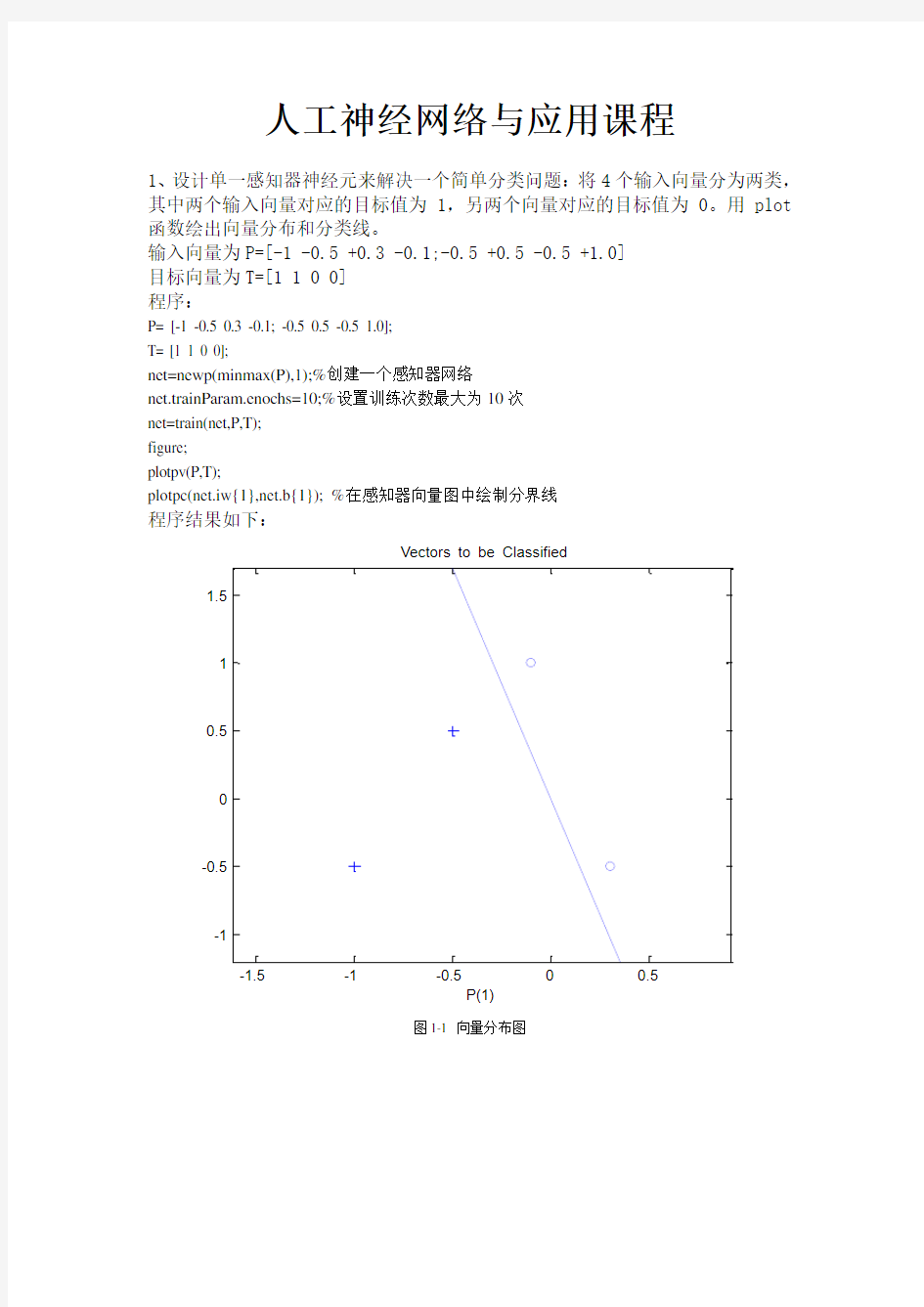
1、设计单一感知器神经元来解决一个简单分类问题:将4个输入向量分为两类,其中两个输入向量对应的目标值为1,另两个向量对应的目标值为0。用plot 函数绘出向量分布和分类线。
输入向量为P=[-1 -0.5 +0.3 -0.1;-0.5 +0.5 -0.5 +1.0] 目标向量为T=[1 1 0 0] 程序:
P= [-1 -0.5 0.3 -0.1; -0.5 0.5 -0.5 1.0]; T= [1 1 0 0];
net=newp(minmax(P),1);%创建一个感知器网络
net.trainParam.enochs=10;%设置训练次数最大为10次 net=train(net,P,T); figure;
plotpv(P,T);
plotpc(net.iw{1},net.b{1}); %在感知器向量图中绘制分界线
程序结果如下:
-1.5
-1
-0.5
00.5
-1
-0.500.5
1
1.5
Vectors to be Classified
P(1)
P (2
)
图1-1 向量分布图
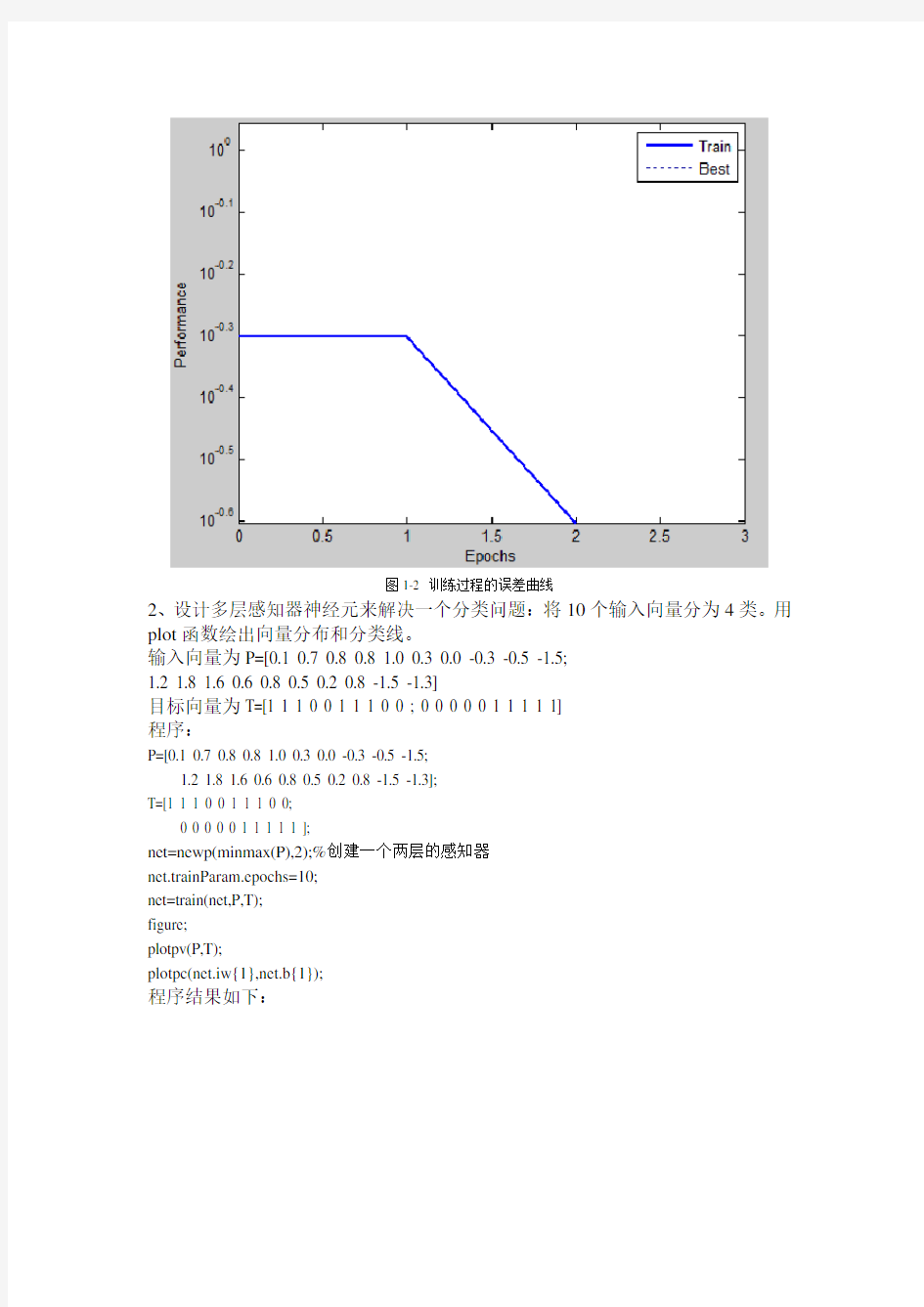
图1-2 训练过程的误差曲线
2、设计多层感知器神经元来解决一个分类问题:将10个输入向量分为4类。用plot函数绘出向量分布和分类线。
输入向量为P=[0.1 0.7 0.8 0.8 1.0 0.3 0.0 -0.3 -0.5 -1.5;
1.2 1.8 1.6 0.6 0.8 0.5 0.2 0.8 -1.5 -1.3]
目标向量为T=[1 1 1 0 0 1 1 1 0 0 ; 0 0 0 0 0 1 1 1 1 1]
程序:
P=[0.1 0.7 0.8 0.8 1.0 0.3 0.0 -0.3 -0.5 -1.5;
1.2 1.8 1.6 0.6 0.8 0.5 0.2 0.8 -1.5 -1.3];
T=[1 1 1 0 0 1 1 1 0 0;
0 0 0 0 0 1 1 1 1 1 ];
net=newp(minmax(P),2);%创建一个两层的感知器
net.trainParam.epochs=10;
net=train(net,P,T);
figure;
plotpv(P,T);
plotpc(net.iw{1},net.b{1});
程序结果如下:
-2.5
-2-1.5-1-0.5
00.51 1.52
-2
-1
1
2
3
Vectors to be Classified
P(1)
P (2)
图2-1向量分布图
图2-2训练过程的误差曲线
3、用多层感知器解决异或分类问题,用plot函数绘出向量分布和分类线。程序:
net=network;%创建一个两层的感知器网络
net.numInputs=1;%一个输入源
net.numLayers=2;%两层网络
net.biasConnect=[1;1];%设定网络的阈值
net.inputConnect=[1;0];%设定输入权值
https://www.360docs.net/doc/8118961139.html,yerConnect=[0 0;1 0];%设置层连接
net.targetConnect=[0 1];%设置目标连接
net.outputConnect=[0 1];%设置输出连接
net.inputs{1}.range=[0 1;0 1];%第一层输入范围
https://www.360docs.net/doc/8118961139.html,yers{1}.size=2;%第一层神经元个数为2
https://www.360docs.net/doc/8118961139.html,yers{1}.transferFcn='hardlim';%激活函数
https://www.360docs.net/doc/8118961139.html,yers{1}.initFcn='initnw';%初始化
https://www.360docs.net/doc/8118961139.html,yers{2}.size=1;%第二层有一个神经元
https://www.360docs.net/doc/8118961139.html,yers{2}.transferFcn='hardlim';
https://www.360docs.net/doc/8118961139.html,yers{2}.initFcn='initnw';
net.adaptFcn='trains';
net.performFcn='mse';%性能函数区均方差函数
net.trainFcn='trainlm';%训练函数
net.initFcn='initlay';%初始化函数
net=init(net);%对网络进行初始化
P=[0 0 1 1;1 0 0 1];%设置训练样本P和T
T=[1 0 1 0];
net.trainParam.epochs=500;%设置网络训练次数为500
net=train(net,P,T);
sim(net,P)
figure; %创建一个新的绘图窗口
plotpv(P,T); %在坐标图中绘制测试数据
plotpc(net.iw{1},net.b{1}) ;%在坐标图中绘制分类线
程序结果如下:
-0.500.51 1.5
-0.5
0.5
1
1.5
Vectors to be Classified
P(1)
P
(
2
)
图3向量分布图
4、设计一个简单的单层线性神经元,使其实现从输入到输出的变换关系,其输入和目标分别为P=[+1.0 -1.2] ;T=[+0.5 +1.0]
图4-1
程序:
P = [+1.0 -1.2];
T = [+0.5 +1.0];
wv= -1:0.2:1; %设定权值列向量
bv = -1:0.2:1; %设定阈值列向量
ES =errsurf(P,T,wv, bv,'purelin');% 计算个神经元的误差曲面
plotes(wv,bv,ES);% 绘制单输入神经元的误差曲面
maxlr = 0.40*maxlinlr(P,'bias');%寻找最快速稳定的学习速率
net = newlin([-2 2],1,[0],maxlr); %创建一个线性层
net.trainParam.goal = .001;
% [net,tr] = train(net,P,T);
net.trainParam.epochs = 1;
net.trainParam.show = NaN;%两次显示之间的训练步数,没有显示是取NaN
h=plotep(net.IW{1},net.b{1},mse(T-sim(net,P)));%绘制权值和阈值在误差曲面上的位置 [net,tr] = train(net,P,T); r = tr; epoch = 1; while true
epoch = epoch+1; [net,tr] = train(net,P,T); if length(tr.epoch) > 1
h = plotep(net.IW{1,1},net.b{1},tr.perf(2),h); r.epoch=[r.epoch epoch] %仿真步数、时刻点 r.perf=[r.perf tr.perf(2)];%训练性能 r.vperf=[r.vperf NaN];%确认性能 r.tperf=[r.tperf NaN];%检验性能 else
break end end tr=r;
plotperf(tr,net.trainParam.goal); p = -1.2;
a = sim(net, p)
程序结果如下:
-1
1
Error Surface
S u m S q u a r e d E r r o r
-1
-0.5
00.51
-1-0.8
-0.6
-0.4-0.200.2
0.40.60.8
1Weight W
B i a s B
Error Contour
图4-2误差曲面和误差等高线
图4-3训练过程的误差曲线
5、设计两层BP网络进行函数逼近,其网络的隐层各神经元的激活函数为双曲线正切型,输出层各神经元的激活函数为线性函数,隐层各有5个神经元,并有如下21组单输入矢量和相对应的目标矢量:
输入向量为P=[-1:0.1:1]
目标向量为T=[-0.96 -0.577 -0.0729 0.377 0.641 0.66 0.461 0.1336 -0.201 -0.434 -0.5 -0.393 -0.1647 -00988 0.3072 0.396 0.3449 0.1816 -0.031 -0.2183 -0.3201];图示给出最终的训练结果和误差记录。
程序:
P=[-1:0.1:1]
T=[-0.96 -0.577 -0.0729 0.377 0.641 0.66 0.461 0.1336 -0.201 -0.434 -0.5 -0.393 -0.1647 -00988 0.3072 ...
0.396 0.3449 0.1816 -0.031 -0.2183 -0.3201];
net=newff(minmax(P),[5,1],{'tansig','purelin'},'traingdx');%创建一个BP网络
net.trainParam.epochs=5000;%设置最大训练次数为5000次
net.trainParam.goal=0.001;%设置训练目标为0.001
net=train(net,P,T);%对函数进行训练
y=sim(net,P);
error=y-T;
res=norm(error);
plot(P,T,'r+');%函数的实际值
hold on;
plot(P,y,'.'); %网络的输出结果
figure;
plot(1:21,y-T); %绘制网络的误差曲线程序结果如下:
0510152025 -0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
图5-1网络的误差曲线
图5-2 训练结果
6.数据如题5所给,用径向基函数进行逼近,给出结果和误差曲线。 程序:
P=[-1:0.1:1]
T=[-0.96 -0.577 -0.0729 0.377 0.641 0.66 0.461 0.1336 -0.201 -0.434 -0.5 -0.393 -0.1647 -00988 0.3072 0.396 0.3449 0.1816 -0.031 -0.2183 -0.3201]; %创建5个RBF 网络,分布密度分别为1,2,3,4,5 for i=1:5
net=newrbe(P,T,i); y(i,:)=sim(net,P); end
%绘制误差曲线 plot(1:21,y(1,:)-T); hold on
plot(1:21,y(2,:)-T,'+'); hold on
plot(1:21,y(3,:)-T,'.'); hold on
plot(1:21,y(4,:)-T,'r--'); hold on
plot(1:21,y(5,:)-T,'g-.') hold off
程序结果如下:
0510152025
-400
-200
200
400
600
800
图6 网络的逼近误差曲线
7、设计Hopfield网络,针对受到污染的数字3和4进行正确识别。
图7-1 已经受到污染的数字3和4
图7-2 正确的数字1、2、3和4
程序:
one=[-1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1];
two=[1 1 1 1 1 1 1 1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 1 1 1 1 1 1 1 1 -1 -1];
three=[-1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1];
four=[-1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 1 1 -1 1 1 -1 -1 -1 -1 1 1 -1 -1 1 1 -1 -1 -1 1 1 -1 -1 -1 1 1 -1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1];
T=[one;two;three;four]';
T=[three;four]';
net=newhop(T); %构建一个Hopfield网络
No3={[-1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 1 1 1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 1 -1 -1 1 -1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 1 1 1 1 1 1 1 -1 -1 -1 1 -1 -1 1 -1 1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1]'};
tu3=sim(net,{1,5},{},No3); % 用Hopfield网络将受到污染的数字3识别出来
tu3{3}'
No4={[-1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 1 1 1 -1 -1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 1 1 -1 1 1 1 -1 -1 -1 1 1 -1 1 1 1 -1 -1 -1 1 1 -1 -1 -1 1 1 -1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 -1 -1 -1 1 -1 1 1 -1 -1 -1 1 -1 1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 1 -1 1 1 -1 -1]'};
tu4=sim(net,{1,5},{},No4); % 用Hopfield网络将受到污染的数字3识别出来
tu4{3}'
运行结果如下:
ans =
Columns 1 through 19
-1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 1 1 1 1 -1
Columns 20 through 38
-1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1
Columns 39 through 57
-1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 1 1 1 1 1
Columns 58 through 76
1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 1 1 1 1
Columns 77 through 95
1 1 -1 -1 -1 -1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1
Columns 96 through 100
-1 -1 -1 -1 -1
ans =
Columns 1 through 19
-1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1 1 1 1 -1
Columns 20 through 38
-1 -1 -1 -1 -1 1 1 1 1 -1 -1 -1 -1 -1 1 1 -1 1 1
Columns 39 through 57
-1 -1 -1 -1 1 1 -1 -1 1 1 -1 -1 -1 1 1 -1 -1 -1 1
Columns 58 through 76
1 -1 -1 -1 1 1 1 1 1 1 1 1 -1 -1 -1 -1 -1 -1 -1
Columns 77 through 95
1 1 -1 -1 -1 -1 -1 -1 -1 -1 1 1 -1 -1 -1 -1 -1 -1 -1
Columns 96 through 10
-1 1 1 -1 -1
人工神经网络的模型
人工神经网络的模型:人工神经元的模型、常用的激活转移函数、MP模型神经元 人工神经元的主要结构单元是信号的输入、综合处理和输出 人工神经元之间通过互相联接形成网络,称为人工神经网络 神经元之间相互联接的方式称为联接模式。相互之间的联接强度由联接权值体现。 在人工神经网络中,改变信息处理及能力的过程,就是修改网络权值的过程。 人工神经网络的构造大体上都采用如下的一些原则: 由一定数量的基本神经元分层联接; 每个神经元的输入、输出信号以及综合处理内容都比较简单; 网络的学习和知识存储体现在各神经元之间的联接强度上。 神经网络解决问题的能力与功效除了与网络结构有关外,在很大程度上取决于网络激活函数。人工神经网络是对人类神经系统的一种模拟。尽管人类神经系统规模宏大、结构复杂、功能神奇,但其最基本的处理单元却只有神经元。人工神经系统的功能实际上是通过大量神经元的广泛互连,以规模宏伟的并行运算来实现的。 人工神经网络模型至少有几十种,其分类方法也有多种。例如,若按网络拓扑结构,可分为无反馈网络与有反馈网络;若按网络的学习方法,可分为有教师的学习网络和无教师的学习网络;若按网络的性能,可分为连续型网络与离散型网络,或分为确定性网络与随机型网络;若按突触连接的性质,可分为一阶线性关联网络与高阶非线性关联网络。 人工神经网络的局限性: (1) 受到脑科学研究的限制:由于生理实验的困难性,因此目前人类对思维和记忆机制的认识还很肤浅,还有很多问题需要解决; (2) 还没有完整成熟的理论体系; (3) 还带有浓厚的策略和经验色彩; (4) 与传统技术的接口不成熟。 如果将大量功能简单的形式神经元通过一定的拓扑结构组织起来,构成群体并行分布式处理的计算结构,那么这种结构就是人工神经网络,在不引起混淆的情况下,统称为神经网络。根据神经元之间连接的拓扑结构上的不同,可将神经网络结构分为两大类:分层网络相互连接型网络 分层网络可以细分为三种互连形式: 简单的前向网络; 具有反馈的前向网络; 层内有相互连接的前向网络。 神经网络的学习分为三种类型:有导师学习、强化学习无导师学习 有导师学习:必须预先知道学习的期望结果——教师信息,并依此按照某一学习规则来修正权值。 强化学习:利用某一表示“奖/惩”的全局信号,衡量与强化输入相关的局部决策如何。 无导师学习:不需要教师信息或强化信号,只要给定输入信息,网络通过自组织调整,自学习并给出一定意义下的输出响应。 神经网络结构变化的角度,学习技术还可分为三种: 权值修正、拓扑变化、权值与拓扑修正学习技术又还可分为:确定性学习、随机性学习 人工神经网络 人工神经网络是生物神经网络的某种模型(数学模型);是对生物神经网络的模仿 基本处理单元为人工神经元 生物神经元(neuron)是基本的信息处理单元
基于人工神经网络的通信信号分类识别
基于人工神经网络的通信信号分类识别 冯 涛 (中国电子科技集团公司第54研究所,河北石家庄050081) 摘 要 通信信号的分类识别是一种典型的统计模式识别问题。系统地论述了通信信号特征选择、特征提取和分类识别的原理和方法。设计了人工神经网络分类器,包括神经网络模型的选择、分类器的输入输出表示、神经网络拓扑结构和训练算法,并提出了分层结构的神经网络分类器。 关键词 模式识别;特征提取;分类器;神经网中图分类号 TP391 文献标识码 A Classification and Identification of Communication Signal Using Artificial Neural Networks FE NG Tao (T he 54th Research Institute of CETC,Shijia zhuan g Hebei 050081,China) Abstract The classification and identificati on of communication signal is a typical statistical pattern identification.The paper discusses the theory and method of feature selection,feature extraction and classi fication &identificaiton of communication signal.A classifier based on artificial neural networks is designed,includin g the selection of neural network model,the input and output expression of the classifier,neural network topology and trainin g algorithm.Finally a hierarchical archi tecture classifier based on artificial neural networks is presented. Key words pattern recognition;features extraction;classifier;neural networks 收稿日期:2005-12-16 0 引言 在通信对抗侦察中,侦察接收设备在截获敌方通信信号后,必须经过对信号的特征提取和对信号特征的分析识别,才能变为有价值的通信对抗情报。通过对信号特征的分析识别,可以得到信号种类、通信体制、网路组成等方面的情报,从而为研究通信对抗策略、研制和发展通信对抗装备提供重要参考依据。 1 通信信号分类识别的原理 通信信号的分类识别是一种典型的模式识别应用,其作用和目的就是将某一接收到的信号正确地归入某一种类型中。一般过程如图1 所示。 图1 通信信号分类识别的一般过程 下面简单介绍这几部分的作用。 信号获取:接收来自天线的信号x (t),并对信号进行变频、放大和滤波,输出一个中频信号; A/D 变换:将中频模拟信号变换为计算机可以运算的数字信号x (n); 以上2步是信号空间x (t)到观察空间x (n )的变换映射。 特征提取:为了有效地实现分类识别,必须对原始数据进行变换,得到最能反映分类差别的特征。这些特征的选择和提取是非常重要的,因为它强烈地影响着分类器的设计和性能。理想情况下,经过特征提取得到的特征向量对不同信号类型应该有明显的差别; 分类器设计和分类决策:分类问题是根据识别对象特征的观察值将其分到某个类别中去。首先,在样本训练集基础上确定合适的规则和分类器结构,然后,学习训练得到分类器参数。最后进行分类决策,把待识别信号从特征空间映射到决策空间。 2 通信信号特征参数的选择与特征提取 2 1 通信信号特征参数的选择 选择好的特征参数可以提高低信噪比下的正确 识别率,降低分类器设计的难度,是基于统计模式识别方法最为关键的一个环节。试图根据有限的信号 信号与信息处理 24 2006Radio Engineering Vo1 36No 6
人工神经网络大作业
X X X X大学 研究生考查课 作业 课程名称:智能控制理论与技术 研究生姓名:学号: 作业成绩: 任课教师(签名) 交作业日时间:2010年12月22日
人工神经网络(artificial neural network,简称ANN)是在对大脑的生理研究的基础上,用模拟生物神经元的某些基本功能元件(即人工神经元),按各种不同的联结方式组成的一个网络。模拟大脑的某些机制,实现某个方面的功能,可以用在模仿视觉、函数逼近、模式识别、分类和数据压缩等领域,是近年来人工智能计算的一个重要学科分支。 人工神经网络用相互联结的计算单元网络来描述体系。输人与输出的关系由联结权重和计算单元来反映,每个计算单元综合加权输人,通过激活函数作用产生输出,主要的激活函数是Sigmoid函数。ANN有中间单元的多层前向和反馈网络。从一系列给定数据得到模型化结果是ANN的一个重要特点,而模型化是选择网络权重实现的,因此选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法就能得到包含学习训练样本范围的输人和输出的关系。如果用于学习训练的样本不能充分反映体系的特性,用ANN也不能很好描述与预测体系。显然,选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法是ANN的重要研究内容之一,而寻求应用合适的激活函数也是ANN研究发展的重要内容。由于人工神经网络具有很强的非线性多变量数据的能力,已经在多组分非线性标定与预报中展现出诱人的前景。人工神经网络在工程领域中的应用前景越来越宽广。 1人工神经网络基本理论[1] 1.1神经生物学基础 可以简略地认为生物神经系统是以神经元为信号处理单元,通过广泛的突触联系形成的信息处理集团,其物质结构基础和功能单元是脑神经细胞即神经元(neu ron)。(1)神经元具有信号的输入、整合、输出三种主要功能作用行为。突触是整个神经系统各单元间信号传递驿站,它构成各神经元之间广泛的联接。(3)大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物,其变化是先天遗传信息确定的总框架下有限的自组织过程。 1.2建模方法 神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系,这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法:①神经生物学模型方法,即根据微观神经生物学知识的积累,把脑神经系统的结构及机理逐步解释清楚,在此基础上建立脑功能模型。②神经计算模型方法,即首先建立粗略近似的数学模型并研究该模型的动力学特性,然后再与真实对象作比较(仿真处理方法)。 1.3概念 人工神经网络用物理可实现系统来模仿人脑神经系统的结构和功能,是一门新兴的前沿交叉学科,其概念以T.Kohonen.Pr的论述最具代表性:人工神经网络就是由简单的处理单元(通常为适应性)组成的并行互联网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。 1.4应用领域 人工神经网络在复杂类模式识别、运动控制、感知觉模拟方面有着不可替代的作用。概括地说人工神经网络主要应用于解决下述几类问题:模式信息处理和模式识别、最优化问题、信息的智能化处理、复杂控制、信号处理、数学逼近映射、感知觉模拟、概率密度函数估计、化学谱图分析、联想记忆及数据恢复等。 1.5理论局限性 (1)受限于脑科学的已有研究成果由于生理试验的困难性,目前对于人脑思维与记忆机制的认识尚很肤浅,对脑神经网的运行和神经细胞的内部处理机制还没有太多的认识。 (2)尚未建立起完整成熟的理论体系目前已提出的众多人工神经网络模型,归纳起来一般都是一个由节点及其互连构成的有向拓扑网,节点间互连强度构成的矩阵可通过某种学
人工神经网络
人工神经网络 1.简介 人工神经网络(ANN)技术是一种信息处理范式,灵感来自于生物神经系统的方式,如大脑、处理信息。这拍拉的DIGM关键的元素是一款新颖的结构的信息处理系统。它是由大量的高度互连处理单元(神经元都)工作在和谐中要解决的具体问题。像人一样,学习结合起来,通过实例说明。一个人工神经网络被配置为某一特定的应用,如模式识别或数据分类,通过一个学习的过程。学习在生物体系需要调整突触连接之间的神经元都存在。结合起来,这是有据可查的。在更多的实际统计数据的模糊神经网络的非线性建模工具。它们能被用于模型复杂的输入-输出关系或发现模式在数据。本文将简要介绍有关知识安和打好基础,为进一步研究。 2.人工神经网络的特点 神经网络模型,拥有的卓越的能力也衍生意义是从复杂的或不精确数据,可被用于提取模式和趋势发现太过于复杂以致难以被任何人类或其它计算机技术注意到。一个受过训练的神经网络可以被认为是一个“专家”在信息范畴内,才能来来作分析。这位专家就可以被用来提供给测感和给定新的有兴趣环境,然后提问“假如如此”的问题。 神经网络的其他优点包括: 自适应学习能力:学习如何做任务的基础上,给出了初始数据训练或经验。 自组织:一个人工神经网络可以创造自己的组织或表示它收到的信息时的学习时间。 实时操作:安计算可以对并联,和特殊的硬件设备被设计和制造,充分利用这一能力。 通过冗余信息容错编码:局部破坏网络导致相应的降解性能。然而,一些网络能力甚至可以保留与主要网络伤害。 3.一个简单的神经元和复杂的神经元 一个简单神经元 一种人工神经元是一种装置与许多输入和一个输出,如图。3-26。神经元的有两种模式的操作:培养模式和使用模式。在训练模式中,神经元可以训练的射击(或没有),为特定的输入方式。在使用模式,当一个教输入模式检测到输入、输出成为其关联的输出电流。如果输入模式不属于这教的名单输入方式、烧成规则是用来确定是否发生火灾或不是。 射击规则是在神经网络的一个重要概念。一个射击规则决定了一个人如何计算一个神经
人工神经网络发展前景111
人工神经网络发展前景 姓名 单位 摘要 在分析人工神经网络的发展过程、基本功能、应用范围的基础上,着重论述了神经网络与专家系统、模糊技术、遗传算法、灰色系统及小波分析的融合。 关键词 英文摘要 英文关键词 1前言 人工神经网络的发展起源于何时,说法不一。一般认为,其起源可追溯到Warren WcCulloch和Walter Pitts提出的MP模型。从此拉开了神经网络的序幕。20世纪50年代后期,Frank Rosenblatt定义了一种以后常用的神经网络结构,称为感知器。这是人工神经网络第一个实际应用;20世纪60年代,Bernard Widrow和Ted Hoff提出了一个新的学习算法用于训练自适应线性神经网络;20世纪70年代,Grossberg 提出了自适应共振理论。他研究了两种记忆机制(短期记忆和长期记忆),提出了一种可视系统的自组织神经网络,这是一种连续时间竞争网络,是构成自适应谐振理论网络基础;20世纪80年代,Hopfield 及一些学者提出了Hopfield网络模型,这是一种全连接的反馈网络。此外,Hinton等提出了Boltzman机。Kumellhart等人提出误差反向
传播神经网络,简称BP网络。目前BP神经网络已成为广泛使用的网络。 2应用现状 神经网络以及独特的结构和处理信息的方法,在许多实际应用领域中取得了显著的成效,主要应用如下: 1)信号处理。神经网络广泛应用于自适应信号处理和非线性信号处理中。前者如信号的自适应滤波、时间序列预测、谱估计、噪声消除等;后者如非线性滤波、非线性预测、非线性编码、调制/解调等。2)模式识别。神经网络不仅可以处理静态模式如固定图像、固定能谱等,还可以处理动态模式如视频图像、连续语音等。 3)系统识别。基于神经网络的系统辨识是以神经网络作为被识对象的模型,利用其非线性特性,可建立非线性系统的静态或动态模型。 4)智能检测。在对综合指标的检测(例如对环境舒适度这类综合指标检测)中,以神经网络作为智能检测中的信息处理联想等数据融合处理,从而实现单一传感器不具备的功能。 5)汽车工程。神经网络在汽车刹车自动控制系统中也有成功的应用,该系统能在给定刹车距离、车速和最大减速度的情况下,以人体能感受到的最小冲击实现平稳刹车,而不受路面坡度和车重影响。 6)化学工程。神经网络在光谱分析、判定化学反应的生成物、判定离子浓度及研究生命体中某些化合物的含量与生物活性的对应关系都有广泛应用并取得了一定成果。 7)卫生保健、医疗。比如通过训练自主组合的多层感知器可以区分
人工神经网络综述
目录 1 人工神经网络算法的工作原理 (3) 2 人工神经网络研究内容 (4) 3 人工神经网络的特点 (5) 4 典型的神经网络结构 (6) 4.1 前馈神经网络模型 (6) 4.1.1 自适应线性神经网络(Adaline) (6) 4.1.1.1网络结构 (6) 4.1.1.2学习算法步骤 (7) 4.1.1.3优缺点 (7) 4.1.2单层感知器 (8) 4.1.2.1网络结构 (8) 4.1.2.2学习算法步骤 (9) 4.1.2.3优缺点 (9) 4.1.3多层感知器和BP算法 (10) 4.1.3.1网络结构: (10) 4.1.3.2 BP算法 (10) 4.1.3.3算法学习规则 (11) 4.1.3.4算法步骤 (11) 4.1.3.5优缺点 (12) 4.2反馈神经网络模型 (13) 4.2.1 Hopfield神经网络 (13) 4.2.1.1网络结构 (13) 4.2.1.2 学习算法 (15) 4.2.1.3 Hopfield网络工作方式 (15) 4.2.1.4 Hopfield网络运行步骤 (15) 4.2.1.5优缺点 (16) 4.2.2海明神经网络(Hamming) (16) 4.2.2.1网络结构 (16) 4.2.2.2学习算法 (17) 4.2.2.3特点 (18) 4.2.3双向联想存储器(BAM) (19) 4.2.3.1 网络结构 (19) 4.2.3.2学习算法 (19) 4.2.3.4优缺点 (21) 5.人工神经网络发展趋势以及待解决的关键问题 (22) 5.1 与小波分析的结合 (22) 5.1.1小波神经网络的应用 (23) 5.1.2待解决的关键技术问题 (23) 5.2混沌神经网络 (23) 5.2.1混沌神经网络的应用 (24) 5.2.2待解决的关键技术问题 (24)
人工神经网络的发展及应用
人工神经网络的发展及应用 西安邮电学院电信系樊宏西北电力设计院王勇日期:2005 1-21 1 人工神经网络的发展 1.1 人工神经网络基本理论 1.1.1 神经生物学基础生物神经系统可以简略地认为是以神经元为信号的处理单元,通过广泛的突触联系形成的信息处理集团,其物质结构基础和功能单元是脑神经细胞,即神经元(neuron) 。 (1)神经元具有信号的输人、整合、输出三种主要功能作用行为,结构如图1 所示: (2)突触是整个神经系统各单元间信号传递驿站,它构成各神经元之间广泛的联接。 (3)大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物,其变化是先天遗传信息确定的总框架下有限的自组织过程。 1.1.2 建模方法神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系,这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法:①神经生物学模型方法,即根据微观神经生物学知识的积累,把脑神经系统的结构及机理逐步解释清楚,在此基础上建立脑功能模型;②神 经计算模型方法,即首先建立粗略近似的数学模型并研究该模型的动力学特性,然后冉与真实对象作比较(仿真处理方法)。1.1.3 概
念人工神经网络用物理町实现系统采模仿人脑神经系统的结构和功能,是一门新兴的前沿交义学科,其概念以T.Kohonen.Pr 的论述 最具代表性:人工神经网络就是由简单的处理单元(通常为适应性神经元,模型见图2)组成的并行互联网络,它的组织能够模拟生物神 经系统对真实世界物体所作出的交互反应。 1.2 人工神经网络的发展 人工神经网络的研究始于40 年代初。半个世纪以来,经历了兴起、高潮与萧条、高潮及稳步发展的较为曲折的道路。1943 年,心理学家W.S.Mcculloch 和数理逻辑学家W.Pitts 提出了M—P 模型, 这是第一个用数理语言描述脑的信息处理过程的模型,虽然神经元的功能比较弱,但它为以后的研究工作提供了依据。1949 年,心理学家D. O. Hebb提出突触联系可变的假设,根据这一假设提出的学习规律为神经网络的学习算法奠定了基础。1957 年,计算机科学家Rosenblatt 提出了著名的感知机模型,它的模型包含了现代计算机的一些原理,是第一个完整的人工神经网络。1969 年,美国著名人工智能学者M.Minsky 和S.Papert 编写了影响很大的Perceptron 一书,从理论上证明单层感知机的能力有限,诸如不能解决异或问题,而且他们推测多层网络的感知能也不过如此,在这之后近10 年,神经网络研究进入了一个缓慢发展的萧条期。美国生物物理学家J.J.Hopfield 于1982年、1984 年在美国科学院院刊发表的两篇文章,有力地推动了神经网络的研究,引起了研究神经网络的
人工神经网络的发展及应用
人工神经网络的发展与应用 神经网络发展 启蒙时期 启蒙时期开始于1980年美国著名心理学家W.James关于人脑结构与功能的研究,结束于1969年Minsky和Pape~发表的《感知器》(Perceptron)一书。早在1943年,心理学家McCulloch和数学家Pitts合作提出了形式神经元的数学模型(即M—P模型),该模型把神经细胞的动作描述为:1神经元的活动表现为兴奋或抑制的二值变化;2任何兴奋性突触有输入激励后,使神经元兴奋与神经元先前的动作状态无关;3任何抑制性突触有输入激励后,使神经元抑制;4突触的值不随时间改变;5突触从感知输入到传送出一个输出脉冲的延迟时问是0.5ms。可见,M—P模型是用逻辑的数学工具研究客观世界的事件在形式神经网络中的表述。现在来看M—P 模型尽管过于简单,而且其观点也并非完全正确,但是其理论有一定的贡献。因此,M—P模型被认为开创了神经科学理论研究的新时代。1949年,心理学家D.0.Hebb 提出了神经元之间突触联系强度可变的假设,并据此提出神经元的学习规则——Hebb规则,为神经网络的学习算法奠定了基础。1957年,计算机学家FrankRosenblatt提出了一种具有三层网络特性的神经网络结构,称为“感知器”(Perceptron),它是由阈值性神经元组成,试图模拟动物和人脑的感知学习能力,Rosenblatt认为信息被包含在相互连接或联合之中,而不是反映在拓扑结构的表示法中;另外,对于如何存储影响认知和行为的信息问题,他认为,存储的信息在神经网络系统内开始形成新的连接或传递链路后,新 的刺激将会通过这些新建立的链路自动地激活适当的响应部分,而不是要求任何识别或坚定他们的过程。1962年Widrow提出了自适应线性元件(Ada—line),它是连续取值的线性网络,主要用于自适应信号处理和自适应控制。 低潮期 人工智能的创始人之一Minkey和pape~经过数年研究,对以感知器为代表的网络系统的功能及其局限性从数学上做了深入的研究,于1969年出版了很有影响的《Perceptron)一书,该书提出了感知器不可能实现复杂的逻辑函数,这对当时的人工神经网络研究产生了极大的负面影响,从而使神经网络研究处于低潮时期。引起低潮的更重要的原因是:20世纪7O年代以来集成电路和微电子技术的迅猛发展,使传统的冯·诺伊曼型计算机进入发展的全盛时期,因此暂时掩盖了发展新型计算机和寻求新的神经网络的必要性和迫切性。但是在此时期,波士顿大学的S.Grossberg教授和赫尔辛基大学的Koho—nen教授,仍致力于神经网络的研究,分别提出了自适应共振理论(Adaptive Resonance Theory)和自组织特征映射模型(SOM)。以上开创性的研究成果和工作虽然未能引起当时人们的普遍重视,但其科学价值却不可磨灭,它们为神经网络的进一步发展奠定了基础。 复兴时期 20世纪80年代以来,由于以逻辑推理为基础的人工智能理论和冯·诺伊曼型计算机在处理诸如视觉、听觉、联想记忆等智能信息处理问题上受到挫折,促使人们
人工智能之人工神经网络(PDF 23页)
1 第八章人工神经网络吉林大学地面机械仿生技术教育部重点实验室 张锐
2 8.1 神经网络的基本概念及组成特性 8.1.1 生物神经元的结构与功能特性 从广义上讲,神经网络通常包括生物神经网络与人工神经网络两个方面。生物神经网络是指由动物的中枢神经系统及周围神经系统所构成的错综复杂的神经网络,它负责对动物肌体各种活动的管理,其中最重要的是脑神经系统。 人工神经网络是指模拟人脑神经系统的结构和功能,运用大量的软、硬件处理单元,经广泛并行互连,由人工方式建立起来的网络系统。 生物神经元就通常说的神经细胞,是构成生 物神经系统的最基本单元,简称神经元。 神经元主要由三个部分构成,包括细胞体、 轴突和树突,其基本结构如图所示。 1. 生物神经元的结构 生物神经元结构 吉林大学地面机械仿生技术教育部重点实验室 张锐
3 从生物控制论的观点来看,作为控制和信息处理基本单元的神经元,具有下列一些功能与特性。 2. 神经元的功能特性 (1)时空整合功能 神经元对于不同时间通过同一突触传入的信息,具有时间整合功能;对于同一时间通过不同突触传入的信息,具有空间整合功能。两种功能相互结合,使生物神经元具有时空整合的输入信息处理功能。 (2)神经元的动态极化性 尽管不同的神经元在形状及功能上都有明显的不同,但大多数神经元都是以预知的确定方向进行信息流动的。 (3)兴奋与抑制状态 神经元具有两种常规工作状态,即兴奋状态与抑制状态。 (4)结构的可塑性 突触传递信息的特性是可变的,随着神经冲动传递方式的变化,其传递作用可强可弱,所以神经元之间的连接是柔性的,这称为结构的可塑性。 吉林大学地面机械仿生技术教育部重点实验室 张锐
基于人工神经网络的图像识别
本文首先分析了图像识别技术以及bp神经网络算法,然后详细地阐述了人工神经网络图像识别技术。 【关键词】人工神经网络 bp神经网络图像识别识别技术 通常而言,所谓图像处理与识别,便是对实际图像进行转换与变换,进而达到识别的目的。图像往往具有相当庞大的信息量,在进行处理图像的时候要进行降维、数字化、滤波等程序,以往人们进行图像识别时采用投影法、不变矩法等方法,随着计算机技术的飞速发展,人工神经网络的图像识别技术将逐渐取代传统的图像识别方法,获得愈来愈广泛的应用。 1 人工神经网络图像识别技术概述 近年来,人工智能理论方面相关的理论越来越丰富,基于人工神经网络的图像识别技术也获得了非常广泛的应用,将图像识别技术与人工神经网络技术结合起来的优点是非常显著的,比如说: (1)由于神经网络具有自学习功能,可以使得系统能够适应识别图像信息的不确定性以及识别环境的不断变化。 (2)在一般情况下,神经网络的信息都是存储在网络的连接结构以及连接权值之上,从而使图像信息表示是统一的形式,如此便使得知识库的建立与管理变得简便起来。 (3)由于神经网络所具有的并行处理机制,在处理图像时可以达到比较快的速度,如此便可以使图像识别的实时处理要求得以满足。 (4)由于神经网络可增加图像信息处理的容错性,识别系统在图像遭到干扰的时候仍然能正常工作,输出较准确的信息。 2 图像识别技术探析 2.1 简介 广义来讲,图像技术是各种与图像有关的技术的总称。根据研究方法以及抽象程度的不同可以将图像技术分为三个层次,分为:图像处理、图像分析以及图像理解,该技术与计算机视觉、模式识别以及计算机图形学等学科互相交叉,与生物学、数学、物理学、电子学计算机科学等学科互相借鉴。此外,随着计算机技术的发展,对图像技术的进一步研究离不开神经网络、人工智能等理论。 2.2 图像处理、图像识别与图像理解的关系 图像处理包括图像压缩、图像编码以及图像分割等等,对图像进行处理的目的是判断图像里是否具有所需的信息并滤出噪声,并对这些信息进行确定。常用方法有灰度,二值化,锐化,去噪等;图像识别则是将经过处理的图像予以匹配,并且对类别名称进行确定,图像识别可以在分割的基础之上对所需提取的特征进行筛选,然后再对这些特征进行提取,最终根据测量结果进行识别;所谓图像理解,指的是在图像处理与图像识别的基础上,根据分类作结构句法分析,对图像进行描述与解释。所以,图像理解包括图像处理、图像识别和结构分析。就图像理解部分而言,输入是图像,输出是对图像的描述解释。 3 人工神经网络结构和算法 在上个世纪八十年代,mcclelland与rumelhant提出了一种人工神经网络,截止现在,bp神经网络已经发展成为应用最为广泛的神经网络之一,它是一种多层前馈神经网络,包括输入层、输出层和输入层输出层之间隐藏层,如图1所示,便是一种典型的bp神经网络结构。 bp神经网络是通过不断迭代更新权值使实际输入与输出关系达到期望,由输出向输入层反向计算误差,从而通过梯度下降方法不断修正各层权值的网络。 bp神经网络结构算法如下所述: (1)对权值矩阵,学习速率,最大学习次数,阈值等变量和参数进行初始化设置; (2)在黑色节点处对样本进行输入;
_人工神经网络习题解答
第九章 人工神经网络 9.1答: (1)误差纠正学习;?wkj = ηek(n)xj(n);yk (n )为输入xk (n )时,神经元k 在n 时刻的实际输出,dk (n )表示应有的输出(可由训练样本给出);其中η为学习步长,这就是通常所说的误差纠正学习规则(或称delta 学习规则)。 (2)Hebb 学习;?wkj(n) = F(yk(n),xj(n));当某一突触(连接)两端的神经元同步激活(同为激活或同为抑制)时,该连接的强度应为增强,反之应减弱;由于Δwkj 与yk (n ),xj (n )的相关成比例,有时称为相关学习规则。 (3)竞争(Competitive )学习; 若神经元j 竞争获胜 若神经元j 竞争失败;在竞争学习时,网络各输出单元互相竞争,最后达到只有一个最强者激活,最常见的一种情况是输出神经元之间有侧向抑制性连接,这样原来输出单元中如有某一单元较强,则它将获胜并抑制其它单元,最后只有此强者处于激活状态。 9.2答:略 9.3答:B-P 算法的学习过程如下: (1)选择一组训练样例,每一个样例由输入信息和期望的输出结果两部分组成。 (2)从训练样例集中取一样例,把输入信息输入到网络中。 (3)分别计算经神经元处理后的各层节点的输出。 (4)计算网络的实际输出和期望输出的误差。 (5)从输出层反向计算到第一个隐层,并按照某种能使误差向减小方向发展的原则,调整网络中各神经元的连接权值。 (6)对训练样例集中的每一个样例重复(3)—(5)的步骤,直到对整个训练样例集的误差达到要求时为止。 () ???-=?,0,ji i ji w x w η
精选-人工神经网络复习题
《神经网络原理》 一、填空题 1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。 2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。 3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为离散型和连续型,按学习方式可分为有导师和无导师。 4、神经网络研究的发展大致经过了四个阶段。 5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+△t)=v(t),(t>0),称网络稳定。 6、联想的形式有两种,它们分是自联想和异联想。 7、存储容量指网络稳定点的个数,提高存储容量的途径一是改进网络的拓扑结构,二是改进学习方法。 8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。 9、神经元分兴奋性神经元和抑制性神经元。 10、汉明距离指两个向量中对应元素不同的个数。 二、简答题 1、人工神经元网络的特点? 答:(1)、信息分布存储和容错性。 (2)、大规模并行协同处理。 (3)、自学习、自组织和自适应。
(4)、人工神经元网络是大量的神经元的集体行为,表现为复杂的非线性动力学特性。 (5)人式神经元网络具有不适合高精度计算、学习算法和网络设计没有统一标准等局限性。 2、单个神经元的动作特征有哪些? 答:单个神经元的动作特征有:(1)、空间相加性;(2)、时间相加性;(3)、阈值作用;(4)、不应期;(5)、可塑性;(6)疲劳。 3、怎样描述动力学系统? 答:对于离散时间系统,用一组一阶差分方程来描述: X(t+1)=F[X(t)]; 对于连续时间系统,用一阶微分方程来描述: dU(t)/dt=F[U(t)]。 4、F(x)与x 的关系如下图,试述它们分别有几个平衡状态,是否为稳定的平衡状态? 答:在图(1)中,有两个平衡状态a 、b ,其中,在a 点曲线斜率|F ’(X)|>1,为非稳定平稳状态;在b 点曲线斜率|F ’(X)|<1 ,为稳定平稳状态。 X X
人工神经网络基础_ANN课程笔记 2、深度神经网络
第二章深度神经网络 一、概述 1、基本概念 深度学习(Deep Learning)是一种没有人为参与的特征选取方法,又被称为是无监督的特征学习(Unsupervised Feature Learning)。 深度学习思想的神经网络利用隐含层从低到高依次学习数据的从底层到高层、从简单到复杂、从具体到抽象的特征,而这一特性决定了深度学习模型可以学习到目标的自适应特征,具有很强的鲁棒性。 深度学习的另外一个思想是贪婪算法(greedy algorithm)的思想,其在训练的时候打破了几十年传统神经网络训练方法的“桎梏”,采用逐层训练(greedy layer-wise)的贪婪思想,并经过最后的微调(fine-tuning),这一训练算法的成功也使得深度学习获得了巨大成功。 传统的模式识别方法: 机器学习过程 从最初的传感器得到原始的数据,到经过预处理,都是为了第三步和第四步的特征提取和特征选择,而这个耗时耗力的工作一般要靠人工完成。 这种靠人工的,需要大量的专业知识的启发式的特征提取方法注定要限制机器学习的发展,而深度学习的非监督学习阶段的“盲学习”的特性能够解决该问题,即:深度学习在特征提取和选择时是完全自主的,不需要任何的人工干预。 2、神经网络发展受限之处
?多隐含层的网络容易收敛到参数空间的局部最优解,即偏导数为0 的点,尤其在目标识别中,由于图像的信噪比很低,神经网络很容易陷入局部极小点;?训练算法与网络的初始参数有很大关系,比较容易过拟合; ?训练速度慢; ?在误差反向传播的训练算法中,层数越深,误差越小,甚至接近于0,造成训练失败。 ?误差反向传播算法必须要用到带标签的数据(有导师学习、监督学习),获取带标签的数据十分困难。 3、深度学习的学习算法 深度学习的基本模型从形式上来看和神经网络一致,基本的结构单元都是神经元,由神经元组成网络层,整个网络由输入层,隐含层和输出层组成。 在深度学习理论中,一个网络的学习算法每运行一次,只调整一层网络的参数。在依次对所有层进行这种贪婪(greedy)算法训练之后,再对网络进行一次整体调优(fine-tune),其中第一步称之为预训练(pre-training)。这是整个深度学习理论中的训练算法思想。 在这种训练方式下,即先经过贪婪训练,再整体调优,高维度参数空间中的局部极小点对于最终的训练结果造成的影响可以忽略。 将深度学习的训练思想与误差反向传播算法相对比,将算法第一步的贪婪算法看作是对网络参数的初始化,第二步的整体调优实际中一般用的就是误差反向传播算法,因此深度学习训练算法第一步可以看作是对BP 神经网络进行一个参数空间上比较“合理”的即比较容易达到最优解的初始化,而这种初始化的方式要比误差反向传播算法的初始化方法(随机初始化)要“高明”的多,因为其更有理
人工神经网络综述
人工神经网络综述 摘要:人工神经网络是属于人工智能的一个组成部分,它的提出是基于现代神经科学的相关研究,并且在诸多领域得到了广泛的应用,为人工智能化的发展提供了强大的动力。首先论述了人工神经网络的发展历程,并介绍了几种常见的模型及应用现状,最后总结了当前存在的问题及发展方向。 关键词:神经网络、分类、应用 0引言 多年以来,科学家们不断从医学、生物学、生理学、哲学、信息学、计算机科学、认知学、组织协同学等各个角度探索人脑工作的秘密,希望能制作模拟人脑的人工神经元。特别是近二十年来。对大脑有关的感觉器官的仿生做了不少工作,人脑含有数亿个神经元,并以特殊的复杂形式组成在一起,它能够在计算某些问题(如难以用数学描述或非确定性问题等)时,比目前最快的计算机还要快许多倍。大脑的信号传导速度要比电子元件的信号传导要慢百万倍,然而,大脑的信息处理速度比电子元件的处理速度快许多倍,因此科学家推测大脑的信息处理方式和思维方式是非常复杂的,是一个复杂并行信息处理系统。在研究过程中,近年来逐渐形成了一个新兴的多学科交叉技术领域,称之为“人工神经网络”。神经网络的研究涉及众多学科领域,这些领域互相结合、相互渗透并相互推动。 1人工神经网络概述 1.1人工神经网络的发展 人工神经网络是20世纪80年代以来人工智能领域中兴起的研究热点,因其具有独特的结构和处理信息的方法,使其在许多实际应用中取得了显著成效。 1.1.1人工神经网络发展初期 1943年美国科学家家Pitts和MeCulloch从人脑信息处理观点出发,采用数理模型的方法研究了脑细胞的动作和结构及其生物神经元的一些基本生理特性,他们提出了第一个神经计算模型,即神经元的阈值元件模型,简称MP模型,这是人类最早对于人脑功能的模仿。他们主要贡献在于结点的并行计算能力很强,为计算神经行为的某此方面提供了可能性,从而开创了神经网络的研究。1958年Frank Rosenblatt提出了感知模型(Pereeptron),用来进行分类,并首次把神经网络的研究付诸于工程实践。1960年Bernard Widrow等提出自适应线形元件ADACINE网络模型,用于信号处理中的自适应滤波、预测和模型识别。 1.1.2人工神经网络低谷时期
人工神经网络复习资料题
《神经网络原理》 、填空题 1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。 2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。 3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为 离散型和连续型,按学习方式可分为有导师和无导师。 4、神经网络研究的发展大致经过了四个阶段。 5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+ △)=▼(◎,(t>0),称网络稳定。 6、联想的形式有两种,它们分是自联想和异联想。 7、存储容量指网络稳定点的个数,提高存储容量的途径一是改—进网络的拓扑结构,二是改进学习方法。 8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。 9、神经元分兴奋性神经元和抑制性神经元。 10、汉明距离指两个向量中对应元素不同的个数。 二、简答题 1、人工神经元网络的特点? 答:(1 )、信息分布存储和容错性。 (2 )、大规模并行协同处理。 (3)、自学习、自组织和自适应。
(4)、人工神经元网络是大量的神经元的集体行为,表现为复杂
的非线性动力学特性。 (5)人式神经元网络具有不适合高精度计算、学习算法和网络 设计没有统一标准等局限性。 2、单个神经元的动作特征有哪些? 答:单个神经元的动作特征有:(1 )、空间相加性;(2 )、时间相加性;(3)、阈值作用;(4 )、不应期;(5 )、可塑性;(6)疲劳。 3、怎样描述动力学系统? 答:对于离散时间系统,用一组一阶差分方程来描述: X(t+1)=F[X(t)]; 对于连续时间系统,用一阶微分方程来描述: dU(t)/dt=F[U(t)]。 4、F(x)与x的关系如下图,试述它们分别有几个平衡状态,是 否为稳定的平衡状态? 答:在图(1、中,有两个平衡状态a、b,其中,在a点曲线斜率|F' (X)|>1 ,为非稳定平稳状态;在b点曲线斜率|F' (X)|<1 ,为稳定平稳状态。 在图(2、中,有一个平稳状态a,且在该点曲线斜率|F' (X)|>1 ,为非稳定平稳状态。
介绍人工神经网络的发展历程和分类.
介绍人工神经网络的发展历程和分类 1943年,心理学家W.S.McCulloch 和数理逻辑学家W.Pitts 建立了神经网络和数学模型,称为MP 模型。他们通过MP 模型提出了神经元的形式化数学描述和网络结构方法,证明了单个神经元能执行逻辑功能,从而开创了人工神经网络研究的时代。1949年,心理学家提出了突触联系强度可变的设想。60年代,人工神经网络的到了进一步发展,更完善的神经网络模型被提出。其中包括感知器和自适应线性元件等。M.Minsky 等仔细分析了以感知器为代表的神经网络系统的功能及局限后,于1969年出版了《Perceptron 》一书,指出感知器不能解决高阶谓词问题。他们的论点极大地影响了神经网络的研究,加之当时串行计算机和人工智能所取得的成就,掩盖了发展新型计算机和人工智能新途径的必要性和迫切性,使人工神经网络的研究处于低潮。在此期间,一些人工神经网络的研究者仍然致力于这一研究,提出了适应谐振理论(ART 网)、自组织映射、认知机网络,同时进行了神经网络数学理论的研究。以上研究为神经网络的研究和发展奠定了基础。1982年,美国加州工学院物理学家J.J.Hopfield 提出了Hopfield 神经网格模型,引入了“计算能量”概念,给出了网络稳定性判断。 1984年,他又提出了连续时间Hopfield 神经网络模型,为神经计算机的研究做了开拓性的工作,开创了神经网络用于联想记忆和优化计算的新途径,有力地推动了神经网络的研究,1985年,又有学者提出了波耳兹曼模型,在学习中采用统计热力学模拟退火技术,保证整个系统趋于全局稳定点。1986年进行认知微观结构地研究,提出了并行分布处理的理论。人工神经网络的研究受到了各个发达国家的重视,美国国会通过决议将1990年1月5日开始的十年定为“脑的十年”,国际研究组织号召它的成员国将“脑的十年”变为全球行为。在日本的“真实世界计算(RWC )”项目中,人工智能的研究成了一个重要的组成部分。 人工神经网络的模型很多,可以按照不同的方法进行分类。其中,常见的两种分类方法是,按照网络连接的拓朴结构分类和按照网络内部的信息流向分类。按照网络拓朴结构分类网络的拓朴结构,即神经元之间的连接方式。按此划分,可将神经网络结构分为两大类:层次型结构和互联型结构。层次型结构的神经网络将神经
人工神经网络算法
人工神经网络算法 学习是要透过我们的头脑,因而研究大脑神经细胞的运作,可以帮助我们了解学习在脑神经是如何完成的,进而可以模拟神经细胞的运作以达到類似学习的功能。据估计人脑约有一千亿(1011)个神经细胞,每个神经细胞约有一千(103)根連结与其它神经细胞相連,因此人脑中约有一百万亿(1014)根連结,形成一个高度連结网狀的神经网路(neural network)。科学家们相信:人脑的信息处理工作即是透过这些連结來完成的 [葉怡成1993]。 神经细胞的形狀与一般的细胞有很大的不同,它包括:细胞体(soma):神经细胞中呈核狀的处理机构;轴突(axon):神经细胞中呈轴索狀的输送机构;树狀突(dendrites):神经细胞中呈树枝狀的输出入机构;与突触(synapse):树狀突上呈点狀的連结机构。根据神经学家的研究发现:当神经细胞透过神经突触与树狀突从其它神经元输入脉波讯号后,经过细胞体处理,产生一个新的脉波讯号。如果脉波讯号够强,将产生一个约千分之一秒100 毫伏的脉波讯号。这个讯号再经过轴突传送到它的神经突触,成为其它神经细胞的输入脉波讯号。如果脉波讯号是经过兴奋神经突触(excitatory synapse),则会增加脉波讯号的速率;相反的,如果脉波讯号是经过抑制神经突触(inhibitory synapse),则会减少脉波讯号的速率。因此,脉波讯号的速率是同时取决于输入脉波讯号的速率,以及神经突触的强度。而神经突触的强度可视为神经网路储存信息之所在,神经网路的学习即在调整神经突触的强度。 類神经网路(artificial neural networks),或译为人工神经网路,则是指模仿生物神经网路的信息处理系统,它是由许多人工神经细胞(又称为類神经元、人工神经元、与处理单元)所组成,