轮系及其设计习题解答
3
2'
1
O 1
2
3'O 3
O 4
4
O 2
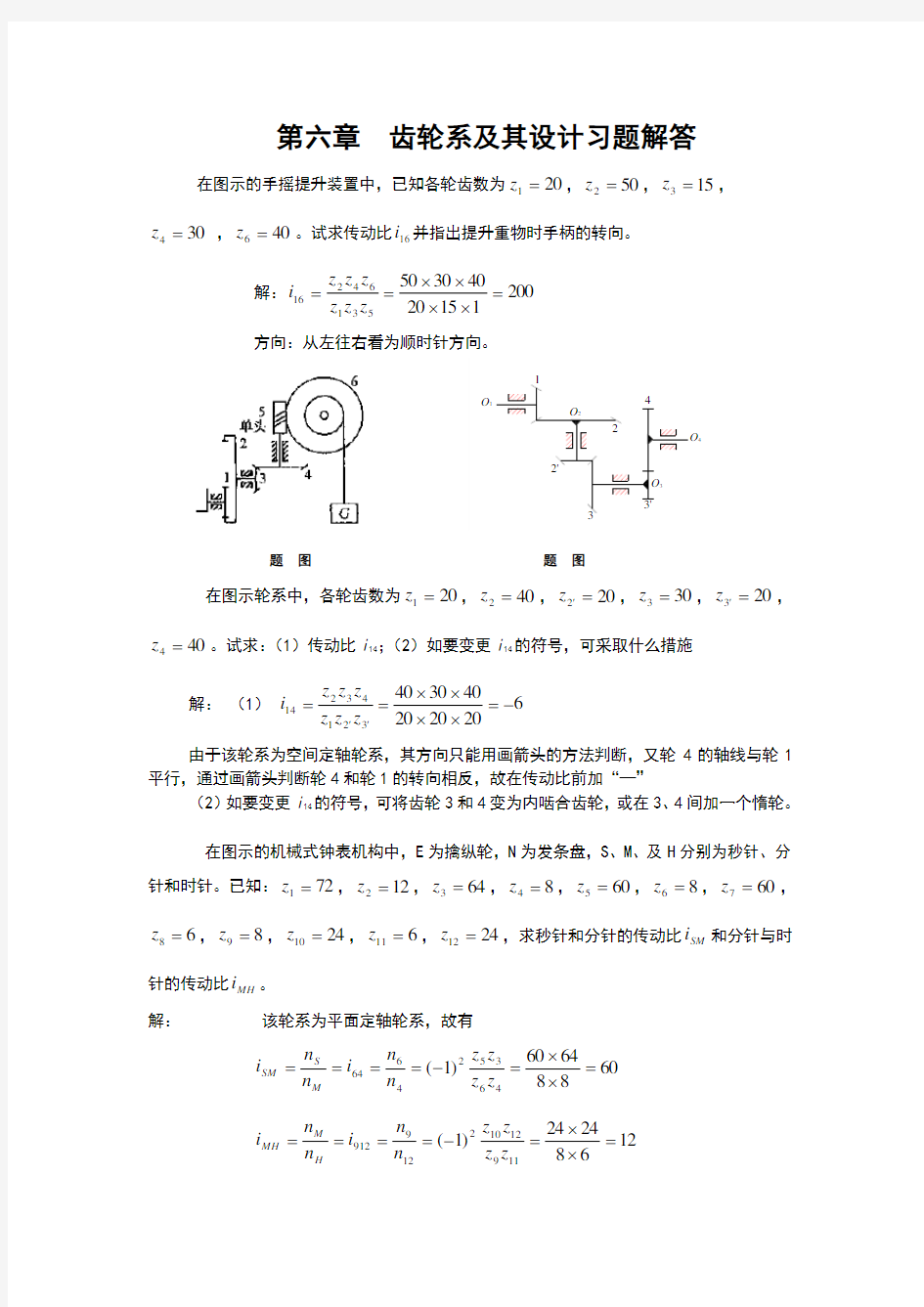
第六章 齿轮系及其设计习题解答
在图示的手摇提升装置中,已知各轮齿数为201=z ,502=z ,153=z ,
304=z ,406=z 。试求传动比16i 并指出提升重物时手柄的转向。
解:2001
152040
305053164216=????==
z z z z z z i
方向:从左往右看为顺时针方向。
题 图 题 图
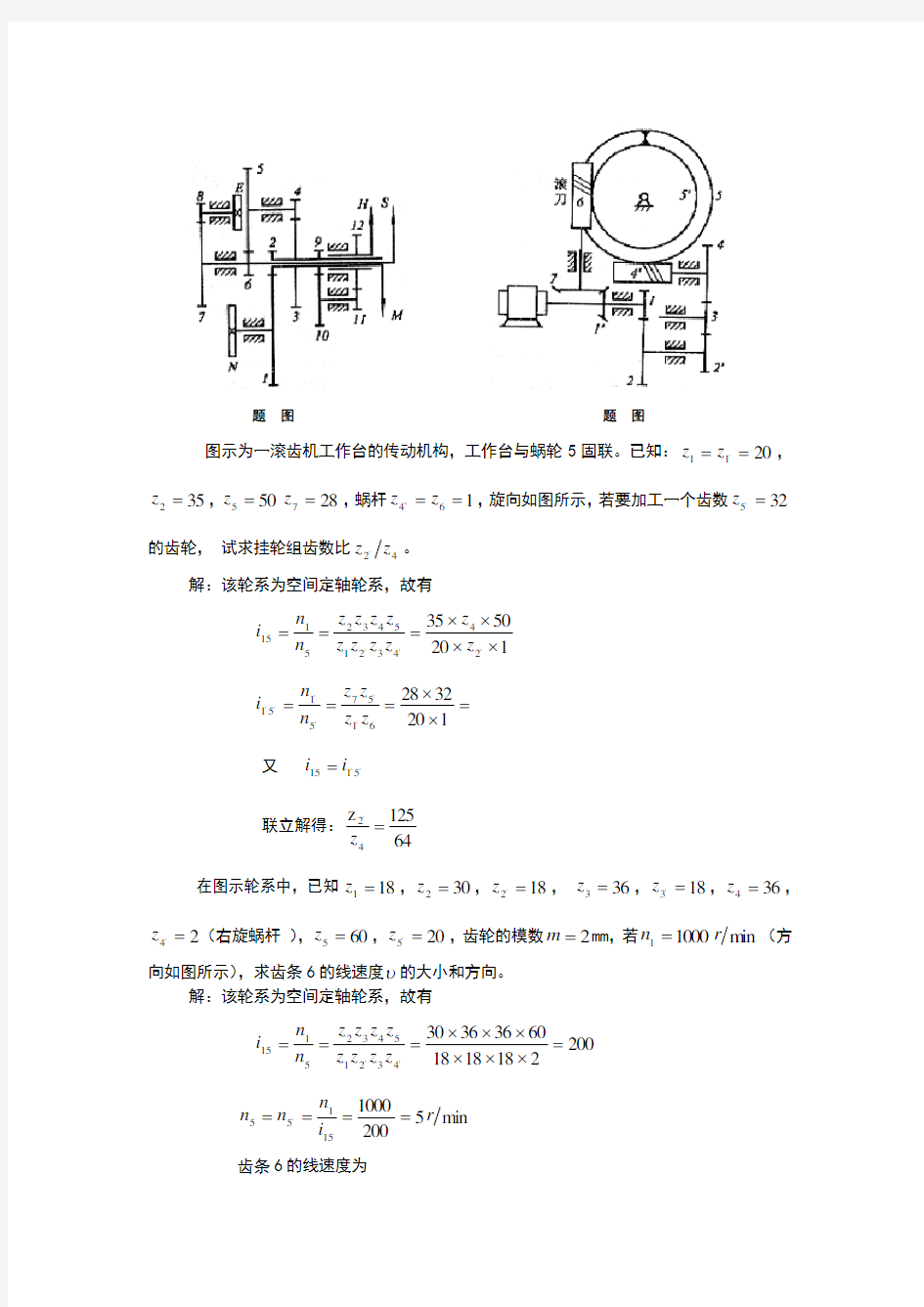
在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z ,
404=z 。试求:(1)传动比i 14;(2)如要变更i 14的符号,可采取什么措施
解: (1) 620
202040
304032143214-=????==
''z z z z z z i
由于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—”
(2)如要变更i 14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。
在图示的机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z ,
68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针的传动比SM i 和分针与时
针的传动比MH i 。
解: 该轮系为平面定轴轮系,故有 608864
60)1(463524664=??=-====
z z z z n n i n n i M S SM 126
824
24)1(11912102129912=??=-====
z z z z n n i n n i H M MH
题 图 题 图
图示为一滚齿机工作台的传动机构,工作台与蜗轮5固联。已知:2011=='z z ,
352=z ,505=z 287=z ,蜗杆164==''z z ,旋向如图所示,若要加工一个齿数32
5='z 的齿轮, 试求挂轮组齿数比42z z '。
解:该轮系为空间定轴轮系,故有 12050
3524432154325115????===
'''z z z z z z z z z z n n i =??===
''''''1
2032
2861575151z z z z n n i 又 5115''=i i 联立解得:
64
125
z 42='z 在图示轮系中,已知181=z ,302=z ,182='z , 363=z ,183='z ,364=z ,
24='z (右旋蜗杆 ),605=z ,205='z ,齿轮的模数2=m mm ,若m in 10001r n =(方
向如图所示),求齿条6的线速度υ的大小和方向。
解:该轮系为空间定轴轮系,故有 200218181860363630432154325115=??????===
''z z z z z z z z n n i min 5200
1000
15155r i n n n ===
=' 齿条6的线速度为
s mm mz n d 5.1060
5
20260
60
555=???=
=
=
'
'
'πππυ
方向:水平向右。
题 图 题 图
图中所示轮系中,已知各轮齿数为:2065321=====z z z z z , 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
解:由于齿轮1、4、5、7为同轴线,有
3214d d r r ++=
则 100404020223214=++=++=z z z z 同理 6040202657=+=+=z z z 又该轮系为空间定轴轮系,故有 1520
2060
100)1(5174653217643235115-=??-=-=-==
z z z z z z z z z z z z z z n n i 图示(a)、(b)为两个不同结构的锥齿轮周转轮系,已知201=z ,242=z ,
302=''z ,403=z , m in 2001r n =,min 1003r n -=。求两轮系的H n 等于多少
题 图
解:在图(a )所示差动轮系1、2—2/
、3中 21323113'
=--=
z z z z n n n n i H H
H
30
2040
24100n 200??=---H H n
解得 m in 600r n H -= 方向与轮1的方向相反。
在图(b )所示差动轮系1、2—2/
、3中
21323113'
-=--=
z z z z n n n n i H H
H
30
2040
24100n 200??-=---H H n
解得 m in 4.15r n H = 方向与轮1的方向相同。
在图示轮系中,已知601=z ,182=z ,213=z ,各轮均为标准齿轮,且模数相等。试求(1)齿轮4的齿数4z ,(2)传动比H i 1的大小及行星架H 的转向。
解:在行星轮系1、2—3、4中,根据同心条件有
2
)
(2)(3221z z m z z m -=-
解得 634=z 10
12160631811131421411=??-=-=-==
z z z z i n n i H
H H 行星架H 的方向与轮1的方向相同。
题 图 题 图
在如图所示轮系中,已知201=z ,252=z ,153=z ,604=z ,齿轮1的转速
m in 3001r n =,求H n 的大小和方向。
解:在行星轮系1、2—3、4中, 有 615206025111131421411=??+=--=-==
z z z z i n n i H
H H )( min 506
300
11r i n n H H ===
方向与轮1的方向相同。 如图所示为一用于自动化照明灯具上的周转轮系。已知:601=z ,3022==''z z ,
4043==z z ,1205=z ,输入轴转速m in 5.191r n =,求箱体的转速。
解: 在行星轮系1、2—2/
—3—4、5、箱体H 中, 有 3403060120403011114215
3231511=????+=--=-==
'z z z z z z i n n i H H H )( min 5.63
5
.1911r i n n H H ===
方向与轮1的方向相同。
题 图 题 图
在图示的变速器中,已知:28611==='z z z ,80353===''z z z ,
26742===z z z ,当鼓轮A 、B 、C 分别被刹住时,求传动比H i 1
解: 刹住鼓轮A 时,1、2、3(H )组成定轴轮系。有 7
20
2880)
1(21321-=-=-=z z z z i H 刹住鼓轮B 时,1/
、4、5、H 组成行星轮系。有 7
27
28801)(11155111=+=-
-=-=='''z z i i i H
H H 刹住鼓轮3时,该轮系由差动轮系1/
、4、5、H 和行星轮系3/
、7、6、5(行星架)
组成。
在差动轮系1/
、4、5、H 中,有
7
20
2880155151-=-=-=--=
'''z z n n n n i H H H
在行星轮系3/
、7、6、5中,有
20
2780281)(11365
635353=+=--=-==
''''z z i n n i 又 H n n ='3 联立求解得 27
47
1=
H i 在图示轮系中,已知301=z ,262=z ,21432==='z z z ,304='z ,25=z (右旋蜗杆 ),又已知齿轮1的转速为m in 1301r n =,蜗杆5的转速为min 4505r n =方向如图所示,求构件H 的转速H n 。
解:该轮系是由定轴轮系1、2;差动轮系2/
、3—3/
、4、H 和定轴轮系4/
、5组成。
在定轴轮系1、2中
15
133026122112====
z z n n i min 15012
1
22r i n n n ==
=' 方向:箭头向上 在定轴轮系4/
、5中
152
30544545====
'''z z n n i min 30455
44r i n n n ==
='
' 方向:箭头向上 在差动轮系2/
、3—3/
、4、H 中,
1244242-=-=--=
'
''z z
n n n n i H H H
130150-=--H
H
n n
解得:m in 90r n H = 方向:箭头向上
题 图 题 图
在如图所示轮系中,已知各轮齿数,21=z ,502=z ,242='z ,483=z ,
205=z ,406=z ,齿轮均为标准齿轮,标准安装,主动轮1转向如图所示,试求i 16并标
出轮2、5、6的转向。
解:该轮系是由定轴轮系1、2;行星轮系2/
、3、4、5(行星架)和定轴轮系5、6组成。
根据同心条件:1202324=+=''z z z 在定轴轮系1、2中
252
50122112====
z z n n i 蜗轮2的方向:箭头向上 在行星轮系2/
、3、4、5中,
624
1201)(11245
425252=+=--=-==
''''z z i n n i 在定轴轮系5、6中
220
406556===
n n i 30056521216=??='i i i i
齿轮5的方向:箭头向上,齿轮6的方向:箭头向左。
在图示轮系中,已知:201=z ,302=z ,25543===z z z ,756=z ,257=z ,
m in 100r n A =方向如图所示。试求B n 的大小和方向。
解:该轮系是由行星轮系2、1—7、6、A 和行星轮系3、4、5、B 组成。 在行星轮系2、1—7、6、A 中,
325
3075201)(1172712622=??+=--=-==
z z z z i n n i A
A A
m in 3002r n = 方向:箭头向上
在行星轮系3、4、5、B 中,
225
251)(11353533=+=--=-==
z z i n n i B
B B m in 150r n B = 方向:箭头向上
题 图
图示的减速装置中,齿轮1装在电动机的轴上,已知各轮的齿数:2021==z z ,
603=z ,904=z ,2105=z ,又电动机的转速m in 1440r n =。求轴B 的转速B n 及其
回转方向。
解:该轮系是由周转轮系1、2、3、4和周转轮系4、5、H 组成。 在周转轮系1、2、3、4中
320
60
134341413-==-=--=
z z n n n n i
在周转轮系4、5、H 中
3
7
902104545445===--=--=
z z n n n n n n n i B B H H H
又3n n B = 联立求得:min 8.17225
3
1r n n B -≈-= B n 的转向与1n 的转向相同。
题 图 题 图
在图示电动三爪卡盘传动轮系中,已知各齿轮的齿数为:61=z ,2522=='z z ,
573=z ,564=z ,试求传动比14i 。
解:该轮系中包含有行星轮系1、2、3、H ;差动轮系1、2—2/
、4、H 和行星轮系
3、2—2/
、4、H 。其中只有两个轮系起独立作用。
在行星轮系1、2、3、H 中,
2
216571)(11131311=+=--=-==
z z i n n i H
H H 在行星轮系3、2—2/
、4、H 中,
56
15657111434344-=-=-=-==
z z i n n i H H H 联立以上两式求解:5884114-==H
H
i i i
在图示自行车里程表的机构中,C 为车轮轴。已知各齿轮的齿数为171=z ,682=z 、
233=z ,194=z ,204='z ,及245=z 。当车轮转一圈时,指针P 转过多少圈
解:该轮系是由定轴轮系1、2;行星轮系5、4/
—4、3、2(行星架)。
在定轴轮系1、2中
417
68122112====
z z n n i 在行星轮系5、4/
—4、3、2中,
114
11924232011145342
532552-=??-=-=-==
''z z z z i n n i
45652
12
5115-===
i i n n i 15456
1n n n P -
==
题 图 题 图
在图示轮系中,已知各齿轮的齿数为:281=z ,,783=z ,244=z ,806=z ,又若m in 10001r n =,求:当分别将轮3或轮6刹住时,构件H 的转速H n 。
解:刹住轮3时,1、2、3、H 组成一行星轮系。有
145328781)(11131311-=+=--=-==
z z i n n i H
h H min 15.26411
r i n n H
H -==
构件H 的方向与1n 相反。 刹住轮6时,该轮系由差动轮系1、2、3、H 和行星轮系4、5、6、3(行星架)组成。
在差动轮系1、2、3、H 中
28
78
133113-=-=--=
z z n n n n i H H H
在行星轮系4、5、6、3(行星架)中
3
1324801)(11463
463443=+=--=-==
z z i n n i 41n n =
联立解得 23
53
11==
H H n n i
min 96.43311
r i n n H
H ==
构件H 的方向与1n 相同。
机械原理题目---轮系
第六章轮系及其设计 计算及分析题 1、已知:Z1=30,Z2=20,Z2’=30,Z3 = 25,Z4 = 100,求i1H。 2、图示轮系,已知各轮齿数Z1=18,Z2= Z4=30,Z3=78,Z5=76,试计算传动比i15。 1 2 3 4 5 H 3、在图示轮系中,已知各轮齿数为Z1=Z3=30,Z2=90,Z2’=40,Z3’=40,Z4=30,试求传动比i1H,并说明I、H轴的转向是否相同? 4、在图示轮系中,已知各轮齿数为Z1 =15,Z2=20,Z2’ = Z3’= Z4=30,Z3=40,Z5= 90,试求传动比i1 H,并说明H的转向是 否和齿轮1相同? 1 I 2 2’ 33’ 4 H
5、在图示轮系中,已知各轮的齿数为Z1= 20,Z2=30,Z3=80,Z4=25,Z5=50,试求传动比i15。 6、在图示轮系中,已知各轮齿数为Z1=19,Z2=76,Z2’= 40,Z3=20,Z4= 80,试求传动比i1H。 7、在图示轮系中,已知各轮齿数为Z1= 20,Z2’= 25,Z2= Z3=30,Z3’= 20,Z4=75,试求: (1)轮系的传动比i1H。 (2)若n1=1000r/min,转臂H的转速n H=? 8、已知图示轮系中各轮的齿数Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min,转向如图。试求轮3的转速n3的大小和转向。 1 2 2’ 3 4 5 3’ 4 5 1 2 3 H 1 2 3 2’ 3’ 4 H
9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。 10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。 11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=?。 1 2 3 H 4 5 n 1 1 2 3 H 2’ 3’ 4 5 1 2 2’ 3 4 5
最新机械基础轮系练习题
XXXXX学校《机械基础》练习题 一、填空题 1.由一系列相互啮合齿轮所构成的传动系统称为_________. 2.按照轮系传动时各齿轮的轴线位置是否固定,轮系分为________和________两大类. 3.当轮系运转时,所有齿轮几何轴线的位置相对于机架固定不变的轮系称为_______. 4.轮系中,既有定轴轮系又有行星轮系的称为________. 5.采用行星轮系,可以将两个独立的运动_______为一个运动,或将一个运动_______为两个独立的运动.6.轮系中含有圆锥齿轮、蜗轮蜗杆、齿轮齿条,其各轮转向只能用_________的方法表示. 7.定轴轮系中的传动比等于_________的转速之比,也等于该轮系中________与_______之比. 8.在各齿轮轴线相互平行的轮系中,若齿轮的外啮合对数是偶数,则首轮与末轮的转向_______;若为奇数,则首轮与末轮的转向__________. 9.在轮系中,惰轮常用于传动距离稍__________和需要改变________的场合. 10.在轮系中,末端件若是齿轮齿条,它可以把主动件的________运动变为齿条的______运动. 11.轮系的特点:(1)可获得_________的传动比;(2)可实现__________距离传动;(3)可实现________、________要求;(4)可_________或__________运动. 12.平面定轴轮系中传动比计算公式为_________,其中(-1)的n次方,n表示 ________.若(-1) 的n次方为正,则首、末两轮转向____. 13.定釉轮系中任一从动件的转速计算公式为______________________. 14.定轴轮系末端通常有下列三种传动形式,则末端件的移动速度v(或移动距离L)的计算公式分别为: (1)末端为螺旋传动时:________________ (2)末端为滚动轮传动时:______________ (3)末端为齿轮齿条传动时:_____________ 二、单选题 1.若齿轮与轴之间( ),则齿轮与轴各自转动,互不影响. A.空套 B.固定 c.滑移 D.空间配合 2.如图所示的轮系中,设已知Z1= Z2=Z3′=Z4= 20,Z3=Z5= 60,又齿轮1、3、3′与5同轴线,试求传动比i15。( ) A.3 B.6 C.9 D. 12 3.汽车后桥传动轴部分组成的轮系为( ) A.平面定轴轮系 B.空间定轴轮系 c.周转轮系 D.都有可能 4.定轴轮系传动比大小与轮系中惰轮的齿数 ( ) A.无关 B.有关,成正比 C.有关,成反比D.有关,不成比例 5.若主动轴转速为1 200 r/min,若要求从动轴获得12 r/min的转速,应采用( )传动. A. -对直齿圆柱齿轮 B.链 c.轮系 D.蜗轮蜗杆6.关于轮系的说法,正确的是 ( ) A.所有机械传动方式中,轮系的传动比最大 B.轮系靠惰轮变速,靠离合器变向 C.周转轮系只能实现运动的合成与分解 D.轮系的传动比,是构成该轮系所有机械传动方式传动叱的连乘积 7.在轮系中,两齿轮间若增加( )个惰轮时,首、末两轮的转向相同. A.奇数 B.偶数 c.任意数 D.以上都可以 8.轮系的末端是螺旋传动,已知末端轴转速行n=80 r/min,三线螺杆的螺距为4 mm,则螺母每分钟移动距离为( )mm. A. 240 B.320 C.960 D. 160 9.轮系的末端是齿轮齿条传动,已知小齿轮的模数,m=3 mm,齿数z=25,末轴转速n=75r/mln,则齿条每分钟移动的距离为( )mm. A.17662.5 B.5625 C.5887.5 D.8331 10.如图所示轮系,Ⅳ轴可得到几种转速( ) A.3种 B.6种 C.9种 D.12种 三、计算题 1.如图所示为多刀半自动车床主轴箱传动系统.已知带轮直径D1=D2-=180 mm,z1=45,z2=72,z3=36,z4 =81,z5 =59,z6 =54,z7=25,z8=88.试求当电动机转速n=1443 r/min时,主轴Ⅲ的各级转速.
轮系及其设计习题解答样本
32'1 O 12 3'O 3 O 4 4O 2 第六章 齿轮系及其设计习题解答 6.1 在图示手摇提高装置中,已知各轮齿数为201=z ,502=z ,153=z , 304=z ,406=z 。试求传动比16i 并指出提高重物时手柄转向。 解:2001 152040305053164216=????==z z z z z z i 方向:从左往右看为顺时针方向。 题 6.1 图 题 6.2 图 6.2 在图示轮系中,各轮齿数为201=z ,402=z ,202='z ,303=z ,203='z ,404=z 。试求:(1)传动比i 14;(2)如要变更i 14符号,可采用什么办法? 解: (1) 620 202040304032143214-=????==''z z z z z z i 由于该轮系为空间定轴轮系,其方向只能用画箭头办法判断,又轮4轴线与轮1平行,通过画箭头判断轮4和轮1转向相反,故在传动比前加“—” (2)如要变更i 14符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一种惰轮。 6.3 在图示机械式钟表机构中,E 为擒纵轮,N 为发条盘,S 、M 、及H 分别为秒针、分针和时针。已知:721=z ,122=z ,643=z ,84=z ,605=z ,86=z ,607=z , 68=z ,89=z ,2410=z ,611=z ,2412=z ,求秒针和分针传动比SM i 和分针与时针传动比MH i 。 解: 该轮系为平面定轴轮系,故有
60886460)1(463524664=??=-====z z z z n n i n n i M S SM 12682424)1(11912102129912=??=-==== z z z z n n i n n i H M MH 题 6.3 图 题 6.4 图 6.4 图示为一滚齿机工作台传动机构,工作台与蜗轮5固联。已知:2011=='z z ,352=z ,505=z 287=z ,蜗杆164==''z z ,旋向如图所示,若要加工一种齿数325='z 齿轮, 试求挂轮组齿数比42z z '。 解:该轮系为空间定轴轮系,故有 120503524432154325115????==='''z z z z z z z z z z n n i =??=== ''''''120322861575151z z z z n n i 又 5115''=i i 联立解得:64 125z 42='z 6.5 在图示轮系中,已知181=z ,302=z ,182='z , 363=z ,183='z ,364=z ,24='z (右旋蜗杆 ),605=z ,205='z ,齿轮模数2=m mm ,若m in 10001r n =(方向如图所示),求齿条6线速度υ大小和方向。
机械原理试题及答案5
第八章轮系 一、选择题 1.轮系可以分为________两种类型。 A.定轴轮系和差动轮系 B.差动轮系和行星轮系 C.定轴轮系和复合轮系 D.定轴轮系和周转轮系 2.差动轮系的自由度为_________。 A.1 B.2 C.3 D.4 3.行星轮系的自由度为__________。 A.1 B.2 C.3 D.4 4.在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动 比数值计算的一般公式是i 1n =_________。 A.轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积 B.轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积 C.轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积 D.轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积 5.在运用反转法解决周转轮系传动比的计算问题时,下列公式中________是正确的。 A.i H mn=(n m —n H )/(n n —n H ) B.i H mn =(n n —n H )/(n m —n H ) C.i H mn =(n H —n n )/(n m —n n ) D.i H mn =(n m —n n )/(n n —n H ) 6.基本周转轮系是由________构成。 A.行星轮和中心轮 B.行星轮、惰轮和中心轮 C.行星轮、行星架和中心轮 D.行星轮、惰轮和行星架 7.下列四项功能中,哪几项_______可以通过轮系的运用得以实现。 ○1两轴的较远距离传动○2变速传动 ○3获得大的传动比○4实现合成和分解运动 A.○1○2 B.○1○2○3 C.○2○3○4 D.○1○2○3○4 8.如图所示,一大传动比的减速器。已知其各轮的齿数为z 1=100,z 2 =101,z 2’ =100 , z 3=99。其输入件对输出件1的传动比i H1 为________ A.10000 B.1000 C.1500 D.2000
-轮系计算题专项训练附答案
轮系计算题专项训练(答案)第六章 =40=2,蜗轮z,,z=20z=40,蜗杆z=161、如图所示,已知:,,, z,3241323并确定各轮的回转方向。nn=800。试求蜗轮的转速41 求传动比 zz、z。zz2、在图示轮系中,已知zz、zz655'、、 4'1、、2、2' 3、 i16 4。 i162z4z5z61z2'z4'z5' ,转向如图所示。蜗轮的齿=21、图示轮系中蜗杆为双头左旋蜗杆Z31=40, 的齿数为Z=1, 2为单头右旋蜗杆Z蜗轮3=50数为Z,
蜗杆3'22=16, =18, Z=46, Z=26, Z=20, ZZ其余各轮齿数为=30, Z65''5'344。i。求=22Z1771 / 7 i172Z3Z4Z5Z6Z71Z2'Z3'Z4'Z5'Z6=50*40*20*18*22/2*1*30*26* 46= 220.7 4、在习题图8所示的轮系中,已知z=15 , z=25 , z=15 , z=30 , 若n=500 ,求齿轮5转速的大小32'21z=15 , z=30, z=2 , z=60, 和15'4'34方向。 2 / 7
zzznz60?30?25?30,=2.5 (n , 顺)时针53412200???52?15?15znzzz?15???41235n5005;齿轮的方向可以画箭头确定。1)n??r(/m?52.52002005、在图示轮系中,已知zzz、zzzzz、z。求传动比65'、、、12、2'3、4 4'5、i。16 3 / 7
,6、如图所示轮系,已知Oz?48z?35,z?20,??z?24,z46,z?23,z48,??15412324的转动 方向。5为主动轴。试计算轮系的传动比并确定齿轮i15 Z=15,=(右旋),Z60,Z2Z7、在如图所示的轮系中,已知= 15==30,Z5i=?)431 2, 该轮系的传动比,求:Z=30 (116 6的转速大小和方向?,求轮=n2()若1200 r / 61 4 / 7
机械原理-习题PRN
绪论 1、试述构件和零件的区别与联系? 2、何谓机架、原动件和从动件? 第一章机械的结构分析 1、两构件构成运动副的特征是什么? 2、如何区别平面及空间运动副? 3、何谓自由度和约束? 4、转动副与移动副的运动特点有何区别与联系? 5、何谓复合铰链?计算机构自由度时应如何处理? 6、机构具有确定运动的条件是什么? 7、什么是虚约束? 1、画出图示平面机构的运动简图,并计算其自由度。 (a) (b) (c) 2、一简易冲床的初拟设计方案如图。设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。 3、计算图示平面机构的自由度,高副低代,判断杆组、机构级别;机构中的原动件用圆弧箭头表示。
(d) (e) (f) 第二章 平面机构的运动分析 1、已知作平面相对运动两构件上两个重合点的相对速度1 2A A V 及1 2B B V 的方向,它们的相对瞬心P 12在何处? 2、当两构件组成滑动兼滚动的高副时,其速度瞬心在何处? 3、如何考虑机构中不组成运动副的两构件的速度瞬心? 4、利用速度瞬心,在机构运动分析中可以求哪些运动参数? 5、在平面机构运动分析中,哥氏加速度大小及方向如何确定? 1、 试求出下列机构中的所有速度瞬心。 (a) (b) (c) (d) 2、图示的凸轮机构中,凸轮的角速度ω1=10s -1 ,R =50mm ,l A0=20mm ,试求当φ=0°、45°及90°时,构件2的速度v 。
题2图 凸轮机构 题3图 组合机构 3、图示机构,由曲柄1、连杆2、摇杆3及机架6组成铰链四杆机构,轮1′与曲柄1固接,其轴心为B ,轮4分别与轮1′和轮5相切,轮5活套于轴D 上。各相切轮之间作纯滚动。试用速度瞬心法确定曲柄1与轮5的角速比ω1/ω5。 第三章 平面连杆机构 1、如何依照各杆长度判别铰链四杆机构的型式? 2、平面四连杆机构最基本形态是什么?由它演化为其它平面四杆机构,有哪些具体途径? 3、图示摆动导杆机构中,AB 杆匀角速转动。该机构存在的几何条件是什么?给定其摆杆的行程速度变化系数K 后,怎么用K 值表达AB 和AC 杆的长度关系? 题3、4图 题5图 4、图示摆动导杆机构中,AB 杆匀角速转动。若 AB AC 2 ,那么,其摆杆的行程速度变化系数为何值?又若摆杆顺时针 方向转动为回程,要求有比工作行程较大的平均速度,那么,应如何选择AB 杆的转向? 5、试回答图示曲柄滑块机构存在的几何条件。若AB 杆等角速转动,而滑块向右移动为回程。要求回程比工作行程少占用时间,那么,应如何选取AB 杆的转向? 1、图示铰链四杆机构,已知:l BC =50mm ,l CD =35mm ,l AB =30mm ,AD 为机架, (1)若此机构为曲柄摇杆机械,且AB 为曲柄,求l AB 的最大值: (2)若此机构为双曲柄机构,求l AB 的范围; (3)若此机构为双摇杆机构,求l AB 的范围。 (a ) (b) 题1图 题2图
机械原理题目---轮系
第六章 轮系及其设计 计算及分析题 1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。 2、图示轮系,已知各轮齿数Z 1=18, Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。 1 2 3 4 5 H | 3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同 — 4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否 和齿轮1相同 1 I 2 2’ 33’ 4 H
5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。 7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求: (1)轮系的传动比i 1H 。 (2)若n 1=1000r/min ,转臂H 的转速n H = | 1 2 2’ 3 4 5 [ 3’ 4 5 1 2 { H 1 2 3 2’ 3’ 4 H
8、已知图示轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。试 求轮3的转速n 3 的大小和转向。 @ 9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。 10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。 11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=。 1 2 3 H 4 5 n 1 1 2 3 H 2’ 3’ \ 45
8轮系习题答案
习 题 答 案 8-1 如图,已知轮系中各轮齿数, Z 1=20, Z 2=50, Z 2‘= 15, Z 3=30 ,Z 3‘=1 , Z 4= 40, Z 4’= 18 , Z 5= 54 ,求i 15和提起重物时手轮转向 解: 600181152054403050''3'215 432154=??????==Z Z Z Z Z Z Z Z i 转向如图所示。 题8-1图 8-2已知轮系中各轮齿数, Z 1=27,Z 2=17,Z 3=99,n 1=6000r/min,求i 1H 和n H 。 解: 0 -313313113==--==n z z n n n n n n i H H H H H 26.311 311=+==Z Z n n i H H 设n 1转向为正,则 1 11,min /184026.36000n n r i n n H H H === 8-3如图所示的外啮合周转轮系中,已知Z 1=100, Z 2=101, Z 2'=100, Z 3=99,求系杆H 与齿轮1之间的传动比i H 1。 解: 213223113)1(Z Z Z Z i H H H -=--=ωωωω
代入上式03=ω 100100991011'21321??=??=-Z Z Z Z H ωω 10000 1100009999111=-==H H i ωω 1000011== ∴ωωH H i 8-4 图示圆锥齿轮组成的周转轮系中,已知Z 1=20, Z 2=30, Z 2‘=50, Z 3=80,n 1=50r/min. 求系杆H 转速。 题8-4图 解: ' 213231Z Z Z Z n n n n H H ??-=-- 等式右边的符号是在转化轮系中确定的。设n1转向为正,则 50 208030050??-=--H H n n min /7.14r n H =∴ 与n1转向相同,方向的判定如图所示。 8-5 如图为标准圆柱直齿轮传动系统,已知Z 1=60, Z 2=20, Z 2‘=25,各轮模数相等,求: 1)Z 3; 2)若已知n 3=200r/min, n 1=50r/min, n 3,n 1转向如图,求系杆H 转速大小和方向; 3)若n 1方向与图中相反时,则系杆H 转速大小和方向如何 解: 1)首先根据同心条件求出Z 3 )(2 1)(213'221Z Z m Z Z m +=- 153=Z
课程教案模板
课程教案 (按章编写) 课程名称:机械原理 适用专业:机械设计制造及自动化等机械类专业 年级、学年、学期:2002级,2004-2005学年第二学期 教材:《机械原理》,黄茂林、秦伟主编,机械工业出版社,2002 《机械原理教程》,申永胜主编,清华大学出版社,1999 任课教师:秦伟 编写时间:2005年2月
绪论 (1) 第一章机构的结构设计 (3) 第二章平面连杆机构及其分析与设计 (5) 第三章凸轮机构及其设计 (7) 第四章轮系及其设计 (9) 第五章其它常用机构 (11) 第六章机械动力学 (12) 第七章机械系统运动方案设计 (14) 绪论 一、教学目标及基本要求 1. 认识和了解机器及其基本功能结构—机构;了解机构的基本功能和结构特征;对机构、可动联接、构件、零件等有明确的概念和具体的认识。 2. 了解本课程的研究对象、主要内容以及在机械设计和人才培养中的地位和作用;了解学习本课程的要求和方法 通过“绪论”的学习,使学生能为后继内容的学习打下一定的感性认识和理性认识基础;明确本课程的内容与作用,激发学生学习的兴趣和积极性。 二、教学内容及学时分配 机器的功能结构及机构(1学时) 机械原理课程的定位与任务 机械原理课程的主要内容、基本要求与学习方法(第二、三节共0.5学时) 三、教学内容的重点和难点 从机器及机械系统的总体去认识机构。 机构的基本功能特征—传递与变换运动;机构的基本功能结构—构件及可动联接。 本课程的学习内容与要求,注意突出其系统综合性和创新性。 四、教学内容的深化与拓宽 介绍本学科领域的现状及发展前沿。 五、教学方式与手段及教学过程中应注意的问题 充分利用多媒体教学手段,通过典型机器案例的功能分析、结构分析及工作过程(特别是其运动传递、变换与做功的过程)分析,具体、形象、生动地认识了解机构及其结构与运动学特征,认识典型常用机构。 应强调学习知识和培养培养能力是相辅相成的,但后者比前者更重要。本课程的教学内容较多而教学时数相对较少,因此在讲授本课程时,着重讲重点、讲难点、讲思路、讲方法
机械原理题库及其答案
机械原理自测题库—单选题(共63 题) 1、铰链四杆机构的压力角是指在不计算摩擦情况下连杆作用于___上的力与该力作用点速度所夹的锐角。 A.主动件 B.从动件 C.机架 D.连架杆 答: 2、平面四杆机构中,是否存在死点,取决于___是否与连杆共线。 A.主动件 B.从动件 C.机架 D.摇杆 答: 3、一个K大于1的铰链四杆机构与K=1的对心曲柄滑块机构串联组合,该串联组合而成的机构的行程变化系数K___。 A.大于1 B.小于1 C.等于1 D.等于2 答: ___。 4、在设计铰链四杆机构时,应使最小传动角γ min A.尽可能小一些 B.尽可能大一些 C.为0° D.45° 答: 5、与连杆机构相比,凸轮机构最大的缺点是___。 A.惯性力难以平衡 B.点、线接触,易磨损 C.设计较为复杂 D.不能实现间歇运动
答: 6、与其他机构相比,凸轮机构最大的优点是___。 A.可实现各种预期的运动规律 B.便于润滑 C.制造方便,易获得较高的精度 D.从动件的行程可较大 答: 7、___盘形凸轮机构的压力角恒等于常数。 A.摆动尖顶推杆 B.直动滚子推杆 C.摆动平底推杆 D.摆动滚子推杆 答: 8、对于直动推杆盘形凸轮机构来讲,在其他条件相同的情况下,偏置直动推杆与对心直动推杆相比,两者在推程段最大压力角的关系为___。 A.偏置比对心大 B.对心比偏置大 C.一样大 D.不一定 答: 9、下述几种运动规律中,___既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。 A.等速运动规律 B.摆线运动规律(正弦加速度运动规律) C.等加速等减速运动规律 D.简谐运动规律(余弦加速度运动规律)答: 10、对心直动尖顶推杆盘形凸轮机构的推程压力角超过许用值时,可采用___
齿轮传动习题(含答案)
齿轮传动 一、选择题 7-1.对于软齿面的闭式齿轮传动,其主要失效形式为________。 A .轮齿疲劳折断 B .齿面磨损 C .齿面疲劳点蚀 D .齿面胶合 7-2.一般开式齿轮传动的主要失效形式是________。 A .轮齿疲劳折断 B .齿面磨损 C .齿面疲劳点蚀 D .齿面胶合 7-3.高速重载齿轮传动,当润滑不良时,最可能出现的失效形式为________。 A .轮齿疲劳折断 B .齿面磨损 C .齿面疲劳点蚀 D .齿面胶合 7-4.齿轮的齿面疲劳点蚀经常发生在________。 A .靠近齿顶处 B .靠近齿根处 C .节线附近的齿顶一侧 D .节线附近的齿根一侧 7-5.一对45钢调质齿轮,过早的发生了齿面点蚀,更换时可用________的齿轮代替。 A .40Cr 调质 B .适当增大模数m C .45钢齿面高频淬火 D .铸钢ZG310-570 7-6.设计一对软齿面减速齿轮传动,从等强度要求出发,选择硬度时应使________。 A .大、小齿轮的硬度相等 B .小齿轮硬度高于大齿轮硬度 C .大齿轮硬度高于小齿轮硬度 D .小齿轮用硬齿面,大齿轮用软齿面 7-7.一对齿轮传动,小轮材为40Cr ;大轮材料为45钢,则它们的接触应力________。 A .1H σ=2H σ B. 1H σ<2H σ C .1H σ>2H σ D .1H σ≤2H σ 7-8.其他条件不变,将齿轮传动的载荷增为原来的4倍,其齿面接触应力________。 A .不变 B .增为原应力的2倍 C .增为原应力的4倍 D .增为原应力的16倍 7-9.一对标准直齿圆柱齿轮,z l = 21,z 2 = 63,则这对齿轮的弯曲应力________。 A. 1F σ>2F σ B. 1F σ<2F σ C. 1F σ =2F σ D. 1F σ≤2F σ 7-10.对于开式齿轮传动,在工程设计中,一般________。 A .先按接触强度设计,再校核弯曲强度 B .只需按接触强度设计 C .先按弯曲强度设计,再校核接触强度 D .只需按弯曲强度设计。 7-7.设计闭式软齿面直齿轮传动时,选择小齿轮齿数z 1的原则是________。
机械原理轮系及其设计
机械原理轮系及其设计
14.在 图 示 的 轮 系 中, 已 知 各 轮 齿 数 为z z z z z 1235620=====, 已 知 齿 轮1、4、5、7 为 同 轴 线, 试 求 该 轮 系 的 传 动 比 i 17。 15.在 图 示 万 能 刀 具 磨 床 工 作 台 横 向 微 动 进 给 装 置 中, 运 动 经 手 柄 输 入, 由 丝 杆 传 给 工 作 台。 已 知 丝 杆 螺 距 P=50 mm , 且 单 头。z z 1219==,z 318=,z 420=, 试 计 算 手 柄 转 一 周 时 工 作 台 的 进 给 量s 。 16.在 图 示 行 星 搅 拌 机 构 简 图 中, 已 知z 140 =,z 220=,ωB =31 rad/s , 方 向 如 图。 试 求: (1) 机 构 自 由 度 F ; (2) 搅 拌 轴 的 角 速 度ωF 及 转 向。
17.图 示 磨 床 砂 轮 架 微 动 进 给 机 构 中,z z z 12416===,z 348=, 丝 杠 导 程 s =4 mm , 慢 速 进 给 时, 齿 轮1 和 齿 轮2 啮 合; 快 速 退 回 时, 齿 轮1 与 内 齿 轮4 啮 合, 求 慢 速 进 给 过 程 和 快 速 退 回 过 程 中, 手 轮 转 一 圈 时, 砂 轮 横 向 移 动 的 距 离 各 为 多 少? 如 手 轮 圆周 刻 度 为200 格, 则 慢 速 进 给 时, 每 格 砂 轮 架 移 动 量 为 多 少? 18.图 示 轮 系 中,z z 13 25==,z 5100=,z z z 24620===, 试 区 分 哪 些 构 件 组 成 定 轴 轮 系? 哪 些 构 件 组 成 周 转 轮 系? 哪 个 构 件 是 转 臂H ? 传 动 比i 16=? 19.在 图 示 的 轮 系 中, 已 知 齿 轮1 的 转 速n 1 120= r/min , 转 向 如 图 所 示, 而 且 z 140=, z 220=, 求: (1)z 3=? (2)n 30=时, 齿 轮2 的 转 速n 2=?( 大 小 和 转 向) (3)n 20=时, 齿 轮3 的 转 速n 3=?( 大 小 和 转 向)
机械原理题目轮系
第六章 轮系及其设计 计算及分析题 1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。 2、图示轮系,已知各轮齿数Z 1=18,Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。 3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同 4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否和齿轮1相同 5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。 6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。 7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求: (1)轮系的传动比i 1H 。 I
(2)若n1=1000r/min,转臂H的转速n H= 8、已知图示轮系中各轮的齿数Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min,转向如图。试求轮3的转速n3的大小和转向。 9、在图示轮系中,已知各轮齿数为Z1= Z3= Z4=20,Z2=40,Z5= 60,n1 = 800r/min,方向如图所示,试求n H的大小 及转向。 10、在图示轮系中,已知各轮齿数为Z1=16 ,Z2=24,Z2’= 20,Z3=40,Z3’= 30,Z4= 20,Z5=70试求轮系的传动比 i1H。 11、在图示轮系中,已知各轮齿数为Z1= 15,Z2=25,Z2’= 20,Z3=60,Z4=10,Z5=30,n1=200r/min,n3=50r/min,试求n1、n3转向相反时,n5=。
轮系及其设计习题
轮系及其设计习题 齿解答 在图示的手摇提升装置中,已知各轮齿数为z120,z250,z315。 z430 ,z640。试求传动比i16并指出提升重物时手柄的转向。 解:i16z2z4z6503040200 z1z3z520XX1方向:从左往右看为顺时针方向。 1O1O222'O333'4O4 题图题图在图示轮系中,各轮齿数为z120,z240,z220,z330,z320,传动比i14;如要变更i14的符号,可采取什么措施?z440。试求: 解: i14z2z3z44030406 z1z2z3202020于该轮系为空间定轴轮系,其方向只能用画箭头的方法判断,又轮4的轴线与轮1平行,通过画箭头判断轮4和轮1的转向相反,故在传动比前加“—” 如要变更i14的符号,可将齿轮3和4变为内啮合齿轮,或在3、4间加一个惰轮。 在图示的机械式钟表机构中,E为擒纵轮,N为发条盘,S、M、及H分别为秒针、分针和时针。已知:z172,z212,z364,z48,z560,z68,z760。 z86,z98,z1024,z116,z1224,求秒针和分针的传动
比iSM和分针与时 针的传动比iMH。 解:该轮系为平面定轴轮系,故有iSMnSnzz6064i646(1)25360 nMn4z6z488nzznM2424i9129(1)2101212 nHn12z9z1186iMH 1 题图题图 图示为一滚齿机工作台的传动机构,工作台与蜗轮5固联。已知:z1z120,蜗杆z4z61,旋向如图所示,若要加工一个齿数z532z235,z550z728,的齿轮,试求挂轮组齿数比z2z4。 解:该轮系为空间定轴轮系,故有i15zzzzn135z4502345 n5z1z2z3z420z21n1z7z52832 n5z1z6201i15又 i15i15 联立解得: z2125 z464 在图示轮系中,已知z118,z230,z218,z336,z318,z436,,z560,z520,齿轮的模数m2mm,若n11z420XXrmin,求齿条6的线速度的大小和方向。 解:该轮系为空间定轴轮系,故有i15zzzzn1303636602345200 n5z1z2z3z41818182n110005rmin i15200n5n5齿条6的线速度为 2 d5n560mz560220560
机械原理考试知识点.doc
机械原理》考试知识点 第一篇基本机构及常用机构的运动学设计 第一章绪论 1.了解机械原理的研究对象及主要内容; 2.了解机械原理的地位和作用;3.了解机械原理的学习目的和方法。 第二章机构的结构分析与综合 1.掌握有关机构的概念,如构件、运动副、运动链、杆组等;2.掌握平面机构运动简图的绘制方法和步骤,能根据实际机械正确绘制机构运 动简图; 3.掌握机构具有确定运动的条件及平面机构自由度的计算,并注意复合铰 链、局部自由度和虚约束等情况; 4.掌握平面机构中高副低代的方法,要求代替前后,机构的自由度和机构的瞬 时运动不变; 5.掌握平面低副机构的结构分析和组成原理,能根据给定的机构运动简图进行 拆杆组,进行机构的结构分析,并确定机构的级别。 第三章平面连杆机构及其设计 1.了解平面连杆机构的类型、应用及其主要特点; 2.掌握平面连杆机构特别是它的基本形式——平面铰链四杆机构的一些基本概 念和基本知识及其演化方法和应用; 3.掌握平面连杆机构的运动特性和传力特性:如有曲柄的条件、急回特性和行 程速度变化系数、压力角与传动角、死点位置、运动连续性等; 4.掌握等视角定理及几何法刚体导引机构的设计;5.掌握机构的刚化反转法及几何法函数生成机构的设计;6.掌握急回机构的设计;
7.掌握用速度瞬心法作平面机构的速度分析方法; 8.掌握用相对运动图解法进行机构的运动分析方法; 9.掌握用复数矢量法进行机构的运动分析的方法。 第四章 凸轮机构及其设计 1.掌握凸轮机构的基本概念、凸轮机构的分类及应用; 2.掌握从动件常用的运动规律及从动件运动规律的设计原则; 3.掌握凸轮机构的反转法原理; 4.掌握图解法设计平面凸轮轮廓曲线的设计方法; 5.掌握解析法设计平面凸轮轮廓曲线的设计方法; 6.掌握凸轮机构的压力角及基本尺寸的设计。 第五章 齿轮机构及其设计 10. 掌握标准直齿圆锥齿轮的传动特点及其基本尺寸的计算。 第六章 轮系及其设计 1.掌握轮系的类型及功用; 1. 了解齿轮机构的类型和应用; 2. 3. 掌握齿廓啮合基本定律; 掌握渐开线的形成及其性4. 5. 掌握渐开线标准直齿圆柱齿轮的基本参数和几何尺寸计算; 掌握渐开线直齿圆柱齿轮的啮合传动特点,包括: 1)定传动比; 2)啮合线 与啮合角; 3)中心距的可分性; 3)正确啮合条件; 4)连续传动条件; 标准中心距和安装中心距; 6)无侧隙啮合条件等。 6. 掌握渐开线齿轮的范成法切齿原理、根切现象及最少齿数; 7. 8. 掌握渐开线齿轮的变位和变位齿轮的几何尺寸计算; 掌握平行轴斜齿圆柱齿轮齿廓曲面的形成、啮合、传动特点及标准几何尺寸计算; 9. 掌握蜗杆蜗轮传动的特点及其基本尺寸的计算;
轮系及其设计复习题及答案
07 轮系及其设计 1.平 面 定 轴 轮 系 传 动 比 的 大 小 等 于 ;从 动 轮 的 回 转 方 向 可 用 方 法 来 确 定。 2.所 谓 定 轴 轮 系 是 指 ①, 而 周 转 轮 系 是 指 ② 3.在 周 转 轮 系 中, 轴 线 固 定 的 齿 轮 为 ;兼 有 自 转 和 公 转 的 齿 轮 称 为 ; 而 这 种 齿 轮 的 动 轴 线 所 在 的 构 件 称 为 。 4.组 成 周 转 轮 系 的 基 本 构 件 有: , , ;i k 1 与i k H 1 有 区 别, i k 1 是 ;i k H 1 是 ;i k H 1 的 计 算 公 式 为 , 公 式 中 的 正 负 号 是 按 来 确 定 的。 5. 行 星 轮 系 齿 数 与 行 星 轮 数 的 选 择 必 须 满 足 的 四 个 条件 是 ①条件、 ②条件、 ③条件、 ④条件。 6.定 轴 轮 系 的 传 动 比 等 于 各 对 齿 轮传 动 比 的 连 乘 积。- - - - - - - - - - - - - - - - - ( ) 7.周 转 轮 系 的 传 动 比 等 于 各 对 齿 轮 传 动 比 的 连 乘 积。- - - - - - - - - - - - - - - - - - ( ) 8.行 星 轮 系 中 若 系 杆 为 原 动 件 可 驱 动 中 心 轮, 则 反 之 不 论 什 么 情 况, 以 中 心 轮 为 原 动 件 时 也 一 定 可 驱 动 系 杆。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( ) 9.图 示 轮 系, 给 定 齿 轮1 的 转 动 方 向 如 图 所 示, 则 齿 轮3 的 转 动 方 向 。 (A )与ω1 相 同; (B )与ω1 相 反; (C ) 只 根 据 题 目 给 定 的 条 件 无 法 确 定。 10.下 面 给 出 图 示 轮 系 的 三 个 传 动 比 计 算 式, 为 正 确 的。 (A )i H H H 12 12= --ωωωω
2019机械原理研究生考试大纲
2019年南理工机械原理研究生考试大纲 一、复习参考书 1、机械设计基础(上). 王华坤、范元勋编,兵器工业出版社,2001.8 2、机械原理. 郑文伟等. 高等教育出版社. 7版 二、复习要点 第一章绪论 1.机械原理的研究对象,机械、机器、机构 2.机械原理课程的内容 3.机械原理课程的地位与作用 第二章平面机械结构分析 1.研究机构结构分析的目的 2.平面运动副及其分类 3.平面机构运动简图 4.平面机构的自由度 重点:平面机构自由度的计算 第三章平面机构的运动分析 1.研究机构运动分析的目的和方法 2.速度瞬心法及其在机构速度分析上的应用 3.用相对运动图解法对机构进行运动分析 重点:瞬心法、相对运动图解法对机构进行运动分析 第四章平面连杆机构及其设计 1.平面连杆机构的应用及其设计的基本问题 2.平面四杆机构的基本型式及其演化 3.平面四杆机构的主要工作特征;有存在曲柄条件、行程速度变化系数、压力角、传动角、死点 4.平面四杆机构的图解法设计 重点:平面四杆机构的工作特征,压力角、传动角、行程速度变化系数的
概念与计算 第五章凸轮机构及其设计 1.凸轮机构的应用和分类 2.从动件常用运动规律及其运动特征 3.按给定运动规律设计凸轮轮廓——图解法 4.凸轮机构的基本尺寸的确定,压力角与基圆半径的关系,滚子半径选择重点:凸轮轮廓的图解法设计,压力角与基圆半径的关系 第六章齿轮机构及其设计 1.齿轮机构的应用和分类 2.平面齿轮机构的齿廓啮合基本定律 3.圆的渐开线及其性质 4.渐开线齿廓的啮合及其特点 5.渐开线标准直齿圆柱齿轮的基本参数和几何尺寸 6.渐开线直齿圆柱齿轮传动的啮合过程和正确啮合条件,齿轮的安装 7.渐开线齿轮传动的重合度 8.渐开线齿轮传动的无侧隙啮合 9.渐开线齿廓的切削加工原理 10.渐开线齿廓的根切,标准齿轮不发生根切的条件,齿轮的变位 11.变位齿轮传动,无侧隙啮合方程 12.平行轴斜齿圆柱齿轮 13.蜗杆蜗轮传动 14.锥齿轮机构 重点:直齿圆柱齿轮的传动原理及传动计算,尺寸计算,重合度计算,变位齿轮原理 第七章轮系及其设计 1.轮系及其分类 2.定轴轮系传动比计算与应用 3.周转轮系的传动比计算与应用 4.复合轮系的传动比与应用 重点:复合轮系的传动比计算
郑文纬《机械原理》配套题库【课后习题】(轮系及其设计)【圣才出品】
第6章轮系及其设计 一、思考题 思6-1 轮系如何分类?周转轮系又可作几种分类?具体如何分法? 答:(1)轮系根据各个齿轮的轴线相对于机架的位置是否固定可分为: ①定轴轮系,各个齿轮的轴线固定; ②周转轮系,至少有一个齿轮的轴线不固定。 (2)周转轮系根据自由度的不同,可分为两类: ①行星轮系,自由度为1; ②差动轮系,自由度为2。 思6-2 如何计算周转轮系的传动比?何谓周转轮系的转化机构?是不是周转轮系中A、B两轮的传动比?为什么?如何确定周转轮系输出轴的回转方向? 答:(1)假想周转轮系的系杆固定,即给周转轮系附加一个使周转轮系转化为一个定轴轮系,通过计算定轴轮系的传动比,间接计算周转轮系中各个齿轮之间的关系。 (2)经加上附加转动后所得的机构称为原周转轮系的转化机构。 (3)不是周转轮系中A、B两轮的传动比,因为它表示A、B在转化机构中的传动比,即。 (4)周转轮系输出轴的回转方向是通过计算确定的。 思6-3 怎样从一个复合轮系中区分哪些构件组成一个周转轮系?哪些构件组成一个定
轴轮系?怎样求复合轮系的传动比? 答:(1)从一个复合轮系中区分周转轮系的方法如下:先找行星轮,即找出那些绕另一几何轴线转动的齿轮,那么支持行星轮的构件就是行星架。然后循行星轮与其他齿轮啮合的线索找到两个中心轮(有时也可能只有一个中心轮),则这些行星轮、中心轮、行星架及机架便组成一个周转轮系。 (2)几个轴线固定的齿轮组成一个定轴轮系。区分定轴轮系的方法:如果一系列互相啮合的齿轮的几何轴线都是不动的,那么这些齿轮和机架便组成一个定轴轮系。 (3)求复合轮系传动比方法:首先分清它包含哪些轮系,然后应用有关公式分别列出传动比计算式,找出各轮系之间联接构件的运动关系式,最后将上述传动比计算式及联接构件关系式联立求解,进而求出复合轮系的传动比。 思6-4 空间齿轮所组成的定轴轮系的输出轴转向如何确定?其传动比有无正负号?如何求空间齿轮所组成的周转轮系的传动比?如何确定其输出轴的转动方向? 答:空间齿轮所组成的定轴轮系的输出轴转向通过画箭头的方向确定;在计算传动比时,没有正负号。 求空间齿轮所组成的周转轮系的传动比方法如下:加上附加转动后得到原周转轮系的转化机构。转化机构中任意两轮的传动比均可用定轴轮系的方法求得。在用公式计算输出轴转速时,各齿轮的转速都要加上正负号,这样求出的输出轴转速就可根据符号确定。 思6-5 第三章的更换机架法、第四章的反转法和第六章的相对运动法(或转化机构法)有什么关系?它们完全相同吗?这些方法在机构的分析与综合中有什么用处?倒置机构与转化机构有无区别?