雷达数据显示终端的系统模型与实现
一种多通道雷达数据记录仪的设计与实现

图1
维普资讯
中 圈 民 航 飞 行 学 院 学 报 4 2
J I l 0 Chn C I dain 1ig olg f a f . ia M A' t F y C le e o n
Ma h m
m
Vo . 3No. 1】 1
作控制服务器连接 ,可独立运行 ,不设置操作与显示 功能,这部分功能分配在系统操作控制服务器 E ,必
通管制指挥质量评洁、空中交通管制指挥差错、事故 征候、空管事故等的事后分析.计算 .直观显示 、 定 量评估和数据、图形打印等 。
一
、
系统结构
多通道雷达数据记录仪由雷达信号接口单元 1 、 雷达数据记录单元 I和系统操作控制服务器 I 三部 I I I
维普资讯
Mad. 2 0 I 02
V .3N 1 o l
中 国 民 航 飞 行 学 院 学 报 Ju t o h a il v t n l l C lg ora f i Cv A i i F ig o ee r] C n l ao yI l
( a hr) D t S a 、卫星或 a e
系统操作控制服务器提供人工操作界面 、系统
工作状态显示、实时监视及回放雷达图象显示,并通 过 L N 的控制接口实现对各{ 录单元的控制、记录 A 已
D N 终端及调制解调器 ( D M )的同步串行通 D MO E 信 口,采甩进口的高可靠性无源数据分配器 ( 以色列 BO KB L C OX产 )与 A C 自动化系统共享雷达源数 T
小于 3 1天。根据系统可靠性没计原则.尽量简化数 据记录单元硬、软件的规模和复杂性 , 提高数据记录 务器可以在不使用时关机。系统时钟 由 G S或外部 P
标捆 问校准。
天气雷达数据处理系统的设计与实现
便、 便于升级 , 完全能够实 时、 高效地处理 常规天气雷达信号。
关 键 词 : 气 雷达 ; 据 处 理 系统 ; 号 处 理 器 ; 线控 制 器 天 数 信 天 文献标识码 : A 中 图 分 类 号 : N99 4 T 5 .
() 1 为提高系统的可靠性、 稳定性、 易维护性 以及设备 的小型化 , 在系统的信号处理器和天线控制器的设计 中使 用 复杂 可编 程逻辑 器件 ( P D) , C L l引。 () 2 信号处理器和天线控制器作为两个独立 的功能设备分别设计 , 分开放置。信号处理器以插卡的形式插
设, 在我 国气象业务和科研中发挥了重要作用 。由于多种原 因, 国业务天气雷达终端的型号繁多 , 我 且在技术标 准 上存 在很 大差 异 , 号处理 方 法 , 据格 式 规定 , 品种类 和 生成 方 法 , 信 数 产 以及 资料 存 储格 式 和方 法 都不 相 同 , 有
的信 号 和数据 处 理 出现错误 , 测数据 失 真 , 观 给正 常业 务观测 , 网拼 图 、 组 数据 共享 以及 重大科 学试 验带 来 困难 和 损失 … 1。另一 方面 , 大规 模集 成 电路 以其 卓越 的性 能和 价格 优 势 , 现代 电子 产 品 的研 制 生产 中被广 泛 采 用 。 超 在 为 此 , 国气 象局 实施 了“ 国天 气雷 达终 端 更新 ” 目, 数 字化 天 气雷 达 进 行更 新 改造 , 中 全 项 对 以确 保 能正 确 地处 理 观 测数 据 , 一雷 达产 品 的数 据 格式 , 足全 国天气 雷 达组 网拼 图 、 据交 换 、 统 满 数 资料 共享 的需求 。 “ 天气雷 达数 据处 理系统 ” 更新 项 目的一个 重要 组成 部 分 , 是 主要 完 成 雷达 回波 的采集 与处 理 、 天线 控 制 、 实 时显 示 与存储 、 回波强 度定标 等 功能 , 雷达 数据 的后续 处理 , 成实 用 的预报 产 品提供 支持 。 为 生 天气 雷达 数 据处理 系统 包含 信号 处理 器 、 天线 控制 器 、 系统处 理软 件 等部 分 。
雷达回波模拟器系统设计与实现

雷达回波模拟器系统设计与实现雷达回波模拟器系统设计与实现引言:雷达回波模拟器是一种用于模拟雷达系统的测试和评估的关键设备,可以在实验室环境中模拟各种真实的雷达回波信号。
本文基于雷达回波模拟器的设计与实现,详细介绍了该系统的原理、结构、主要模块和软硬件实现。
一、系统原理雷达回波模拟器系统是通过生成合成的雷达回波信号,模拟雷达对目标的探测和跟踪的过程。
其主要原理是以真实的目标信息为基础,通过计算机算法和数字信号处理技术,生成与之相匹配的虚拟回波信号。
这些信号可以反映出不同目标的特性,如目标的速度、位置、形状等。
二、系统结构雷达回波模拟器系统主要由以下几个模块组成:1. 数据库模块:用于存储和管理各类雷达回波信号数据,包括目标特性、距离、速度、形状等数据。
2. 参数设置模块:提供用户界面,用于设置模拟器系统的参数,包括目标参数、雷达参数、环境参数等。
3. 目标生成模块:根据用户设定的目标参数,生成合成的虚拟目标回波信号。
4. 信道模拟模块:模拟雷达与目标之间的信号传播过程和环境对信号的影响,如衰减、多径效应等。
5. 雷达接收机模块:接收和处理经信道模拟后的回波信号,包括滤波、解调等。
6. 显示与分析模块:将处理后的回波信号以图形化的方式显示出来,并提供相应的分析工具,如波形分析、频谱分析等。
三、软硬件实现1. 系统硬件实现:系统硬件主要由计算机、数字信号处理器(DSP)、模拟前端电路、显示设备等组成。
计算机作为系统的主控制单元,负责整个系统的运行和控制。
DSP负责对目标回波信号进行数字信号处理,包括滤波、解调等。
模拟前端电路实现了雷达接收机的模拟电路功能,将接收到的回波信号转换为数字信号。
显示设备用于将处理后的回波信号以图形化的方式显示出来。
2. 系统软件实现:系统软件主要分为控制软件和信号处理软件两部分。
控制软件运行在计算机上,通过用户界面与用户进行交互,实现参数设置、数据管理、系统控制等功能。
信号处理软件则运行在DSP 上,负责对目标回波信号进行数字信号处理,生成合成的虚拟回波信号。
基于WEBGIS的气象探测数据显示系统的设计与实现
基于WEBGIS的气象探测数据显示系统的设计与实现作者:郝振荣王小兰来源:《科技与创新》2014年第06期摘要:根据气象数据空间分布的特点,基于B/S架构,采用Map Server地理信息服务器、Oracle Spatial空间信息管理组件和Post GIS,Open Scales等开源WEBGIS软件完成了山西省气象探测数据显示系统。
该系统实现了气象观测站、雷达、闪电和卫星云图等多种气象数据的集成显示,为天气预报、气象服务等业务应用提供了数据支持,全面提高了气象数据的共享应用能力。
关键词:WEBGIS;气象探测;显示系统;数据中图分类号:P208 文献标识码:A 文章编号:2095-6835(2014)06-0144-03随着气象业务服务需求的牵引和技术发展的推动,气象观测业务已从低时空分辨率有限视野的定时常规监测向遥感、遥测、连续、自动的高时空分辨率综合观测方向发展。
综合探测系统所提供的多元化监测信息是进行大气环境分析、天气预报和气候预测重要的基础资料。
如何将收集到的各种气象探测数据以准确、合理、多样化的方式展现出来,增强对气象预报、预测和公共气象服务业务的科技支撑,已成为迫切需要解决的问题。
WEBGIS作为地理信息系统基于Web的实现方式,与传统的桌面GIS相比,它具有以下特点:独立于操作系统,部署便捷;容易实现大范围的共享访问;客户端共同采用服务端数据,保证了数据的一致性,避免产生信息孤岛;业务用户不必花费大量的经费采购昂贵的GIS 软件。
对访问空间性和时间性显著、数据量巨大的数据,WEBGIS具有很大的优势。
气象数据在空间和时间上连续分布的特性使得地理信息系统成为解决上述问题的可行方法之一。
1 系统分析与设计1.1 系统分析按照GIS划分的数据类型,主要有矢量数据和栅格数据。
它可将气象探测数据与GIS数据相对应,即以站点观测组织的要素数据,比如气温、气压、湿度、降水和雷电等为矢量数据;以面或多维空间组织的雷达和卫星云图等资料为栅格数据。
雷达数据显示终端的系统模型与实现

Abta tStain aa Dsly (DD sa mpratcmp nn fAi T a i Coto S s src :i t D t ipa S )i n i otn o oe to r rfc nrl y u o
维普资讯
第 2 0卷 第 】朝
20 0 2年 2月
中 国 民 航 学 院 学 报
J OURNAL OF CI L VI AVI ATI ON UNI ERS TY V I OF CHI NA
Vol20 o 1 N
F  ̄ a r, 0 2  ̄ ay 2 0
u e o i a o a s ly l f St t n D t Di a . u i a p Ke W o d AT ; DD; i f t T y r s: C S L nl G K+;e t p x v co ma r
本 项 目 中 , 笔 者 尝 试 研 制 了 一 套 基 于 LnL it x
操作 系统的空 中交通 管制 系统。 中, 其 雷达数据显 示 终端就是该空中交通管 制系统 中的一个重要组
空 中 交 通 管 制 ( rTaf o t lS s m) Ai rfc C nr yt 简 成 部 分 。 i o e
称 A C系统 , T 是把计算机 、 雷达 、 显示 器和通信等
固 1 空 中主通管 制 末统蛆 成框 图
窗 口 、 窗 口 、 陆 窗 口 、 令 输 人 窗 口 、 统 状 态 子 着 命 系 窗 ¨ 和 飞 机列 表 窗 口 。其 中 主 窗 口 和 子 窗 口用 于
二次雷达显控终端的设计与实现

二次雷达显控终端的设计与实现李红兵【摘要】In order to satisfy the increasing demand of modern secondary radar to the display and control terminal with high performance, this paper designs and realizes display and control terminal of universal radar based on CPU subcard.For this display and control terminal, the hardware integrates several communication interfaces such as gigabit Ethernet, RapidIO bus interface, USB man-machine interactive interface, LVDS video output, etc., and the software development uses Qt tool under Linux operating system, the graphice human-computer interaction and flight path display are realized, and the display interface is friendly and attractive.Finally, the actual test verifies the correctness of the method, and the display terminal with high performance is successfully applied to a certain secondary radar.%为了满足现代二次雷达对高性能显控终端日益增长的需求,设计与实现了基于CPU子卡的通用雷达显控终端,该显控终端硬件集成千兆以太网、RapidIO总线通信接口、USB人机交互接口和LVDS视频输出等功能;软件开发在Linux操作系统上,通过采用Qt实现了图形化人机交互、图表、航迹显示,显示界面友好、美观.最后通过实际测试,验证了工作的正确性,并将此应用于某型二次雷达中.【期刊名称】《舰船电子对抗》【年(卷),期】2019(042)001【总页数】5页(P112-116)【关键词】二次雷达;CPU子卡;显控终端;Linux;人机交互【作者】李红兵【作者单位】中国电子科技集团公司第十研究所, 四川成都 610036【正文语种】中文【中图分类】TN957.70 引言显控终端是二次雷达信息输出和人机交互的重要设备,主要完成雷达系统的参数设置、图表和航迹显示、工作状态检测、参数查询等功能[1]。
基于C#设计的空管二次雷达显示系统

基于C#设计的空管二次雷达显示系统黄永坚【摘要】设计一种空管二次雷达显示系统,该系统实现现有二次雷达配备的显示系统应有的功能,具备目标点迹航迹显示、雷达原始视频显示,并实现目标数据统计分析及系统性能监视.系统通过基于分层开放式模块设计实现了软件总体架构的设计,与此同时,设计了消息控制机制以及包括AsterixR类、Tag类和显示类等多种类.系统实现硬件资源简洁,性能较好.【期刊名称】《科技视界》【年(卷),期】2018(000)024【总页数】2页(P17-18)【关键词】空管;二次雷达显示;C#;类设计【作者】黄永坚【作者单位】中国民用航空中南地区空中交通管理局广西分局,广西南宁 530000【正文语种】中文【中图分类】TP311.520 引言空管二次雷达是空中交通管制工作监视的重要设备,可以为空管自动化系统提供有效的数据源。
空管二次雷达的自身显示也非常重要,其对于雷达头数据质量的判断、空管自动化及雷达性能分析及故障排查有关键性作用。
对于空管技术保障人员,空管二次雷达的显示是一种技术保障的工具也是学习雷达数据处理的重要平台。
通常国内外雷达生产家都会配备一个以上的雷达本地终端显示,但是对于实际空管现场运行有不少不合实际的情况。
本文从实际出发,研究设计一种雷达显示系统,该系统通过C#设计实现,在实际中应用性能较好,对设备维护人员理解相关数据处理和信号处理有一定的意义。
1 设计的出发点及功能本文的设计依照《MH/T 4010-2006空中交通管制空管二次雷达设备技术规范》以及《MHT 4008-2000空管雷达及管制中心设施间协调移交数据规范》,研究相应的雷达数据格式包括 ASTERIX CAT001、CAT002、CAT034、CAT048以及CAT240多种欧控雷达格式。
结合实际情况系统采用良好的人机交互界面,通过局域网实现远程部署及远程显示能力,具备目标点迹航迹显示、雷达原始视频显示,实现目标数据统计分析及系统性能监视。
雷达阵地三维数字化系统的设计与实现——基于国产三维激光扫描仪的雷达阵地快速勘测应用

雷达阵地三维数字化系统的设计与实现——基于国产三维激光扫描仪的雷达阵地快速勘测应用李光伟;曹原;才长帅【摘要】雷达装备性能的发挥常常受制于雷达阵地周围地理环境,因而根据地理环境合理选择雷达阵地架设点是充分发挥雷达系统性能和有效遂行战斗任务的重要前提.雷达阵地三维数字化系统以基于国产三维激光扫描仪所获取的地形数据为基础,构建三维高程地形模型,可以有效地计算雷达架设点的遮蔽数据以及断面数据,从而为精确、快速地勘选雷达阵地提供重要的辅助作用.%The performance of aradar system is usually affected by its surrounding geographical environment. Radar position selection is therefore an essential prerequisite for fully exerting the effect of the radar and efficiently carrying out combat missions.Based on the terrain data obtained by domestic three-dimensional laser scanners,three-dimensional digital system for radar position selection can accurately provide the shadowing area and the cross-section of the terrain.Thus it can support to exactly and rapidly select the radar position.【期刊名称】《电子测试》【年(卷),期】2015(000)021【总页数】4页(P24-27)【关键词】雷达阵地勘选;三维激光扫描;点云数据【作者】李光伟;曹原;才长帅【作者单位】空军装备研究院雷达与电子对抗研究所,北京,100085;空军装备研究院雷达与电子对抗研究所,北京,100085;空军装备研究院雷达与电子对抗研究所,北京,100085【正文语种】中文【中图分类】E919三维激光扫描仪作为一种新型的非接触式海量高精度数据获取手段,在国内外已经得到了广泛的应用。
基于DirectX的雷达可视化仿真系统的设计与实现

DOI : 1 0 . 3 9 6 9  ̄ . i s s n . 1 0 0 7 — 1 4 2 3 . 2 0 1 3 . 0 1 . 0 1 7
基于 D i r e c t X的雷达可视化仿真 系统 的设计与 实现
0 引
言
( 1 ) 描 述对 象 集群 是一 系列 由用 户 构建 的对 象 . 用户 通过设置其属性 . 以及 这些对 象的互相关联 . 可 以 描述整个 图形 界面上要表现 的信息 这些描述 对象集
群 包 括 窗 口菜 单 、 对话框 、 控件 、 地图 、 图层 、 图元 、 等
法对不 同型号的雷达所提 供的信处理包括数据 的采集 、 分类 、 分析及 处理 。 ( 2 ) 绘 制者( f g D r a w e r ) 跟 踪描述 对象 集群 的变 化 .
在适 当的时候 控制图元调度者和漫游控制在硬件 中准 备绘制 的对象 ,然后在适 当的时候 以优化后 的绘 制方
周 俊 成
( 四川 大 学 计 算 机 学 院 ,成 都 6 1 0 0 0 0 )
摘 要 :针 对 指 挥 控 制 系统 处 理 大 量 雷 达 数 据 所 面 临 的 问 题 . 利 用三维可视化技 术. 建 立 一 个 基 于
Di r e c t X 的 雷 达 可视 化 仿 真 系统 。 系统 通 过 软 件 形 式 , 替代业界常用的雷达扫描转换卡 。 对
随着雷达 行业 的快速发 展 , 在 军事 、 飞行 、 安全 等 许多领域 内 .都 需要在各种指挥 控制 中心显示 终端上 显示雷达信 号处理后 的态 势图形或文字信 息 .所 以 目
雷达对抗仿真系统中雷达数据库设计与实现
0 引言
随着 武器装备 的快 速发展 ,雷达等 电子设 备所 面临 的电磁环境越 来越 复杂 ,为 了研究 复杂 电磁 环 境 下雷达 对抗装 备的效 能 , 目前 国 内外普 遍采用 计 算 机仿真 的方法 ,开发各 种雷达对抗 仿真 系统 ,对
第2 5卷 第 1 期 21 0 0年 1月
海 军 航 空 工 程 学 院 学 报
J un l f v l rn u c l n  ̄ n u e l ie t o r a Na a o a t a dAs o a f a v  ̄i o Ae i a i Un y
、 1 2 No 1 ,.5 0 . J .00 n a 2 1
7) 数据库 服务器 。 仿真 系统的运 行存在 大量数 据信息 的交 互 、读取 和存储 ,数据库 服务器为各个
厂
磊
台位提供初 始化所需 信息和保 存仿真过 程以及结果
巾的重要信 息 。
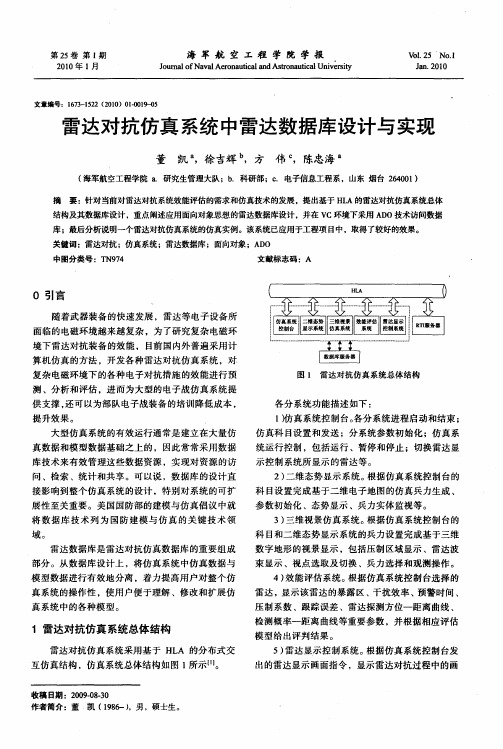
2 雷 达对 抗 仿 真 系统 应 用 流 程
雷达对抗仿 真系统 的应用流 程如 图 2所示 L。 2 】
域。
各分 系统功能描 述如下 :
1 真系统控 制 台。 肪 各分 系统进 程启动 和结束 ;
仿真科 目设置 和发送 ;分系统 参数初 始化 ;仿 真系
统运行 控制 ,包括运 行 、暂停 和停止 ;切换雷达 显 示控制 系统所 显示 的雷达等 。 2) 二维 态势显示 系统 。 根据 仿真 系统 控制 台的 科 目设置 完成基 于二维 电子地 图的仿真兵 力生成 、 参 数初始化 、态势 显示 、兵 力实体 监视等 。 3) 三维视 景仿真 系统 。 根据仿 真系统控 制 台的
基于FPGA的激光雷达SLAM测绘设计与实现

基于FPGA的激光雷达SLAM测绘设计与实现激光雷达(SLAM)是一种通过激光传感器实现地图构建和自我定位的技术,在无人驾驶、机器人导航和三维环境模型构建等领域有着广泛的应用。
而FPGA (Field Programmable Gate Array) 是一种灵活可编程的集成电路,可以通过编程重新配置其内部电路,因此被广泛应用于数字信号处理和实时图像处理等领域。
本文将结合FPGA和激光雷达SLAM技术,探讨其在测绘设计与实现中的应用。
一、激光雷达SLAM技术简介激光雷达SLAM技术是一种通过激光传感器获取环境地图信息,并对机器人自身位置进行实时定位的技术。
通过激光传感器获取环境的距离和角度信息,然后利用SLAM算法实时构建地图,并根据机器人的运动轨迹进行自我定位,从而实现无需外部定位设备的自主导航。
激光雷达SLAM技术主要分为前端激光传感器数据的获取和后端SLAM算法的实时处理两个部分。
前端激光传感器获取到的距离和角度信息需要经过滤波、数据配准和特征提取等处理,以获得清晰可靠的环境地图数据。
而后端SLAM算法则负责实时地图构建和机器人自身定位,通常采用的是基于概率、特征匹配和运动模型的算法。
二、FPGA在激光雷达SLAM中的应用1. 数据获取与处理FPGA可以用于激光雷达数据的快速采集、滤波和预处理。
激光雷达传感器产生的海量数据需要实时处理,FPGA的并行计算能力和高速数据通路使得其能够处理大规模的激光雷达数据流。
FPGA能够实现高速的数据滤波和预处理算法,对激光雷达采集的原始数据进行有效的降噪和数据配准,从而提高地图构建的准确性和稳定性。
2. 实时地图构建与定位FPGA可以用于实时的激光雷达SLAM算法的加速计算。
SLAM算法通常需要进行大规模的地图匹配和特征提取计算,而FPGA的并行计算能力和灵活的编程结构使得其能够加速这些复杂的计算任务。
通过将SLAM算法的关键部分实现在FPGA硬件逻辑中,可以实现低延迟、高精度的地图构建和机器人定位,提高激光雷达SLAM系统的实时性和稳定性。
基于激光雷达的室内导航系统设计与实现

基于激光雷达的室内导航系统设计与实现室内导航系统是指通过科技手段,在室内环境中利用定位和导航技术为用户提供准确可靠的导航服务。
基于激光雷达的室内导航系统是一种先进的室内导航系统,它采用激光雷达作为主要的感知设备,实现对室内环境的精准定位和导航。
基于激光雷达的室内导航系统设计与实现主要包括以下几个方面:硬件设计、传感器数据处理、室内地图构建和路径规划算法。
首先是硬件设计。
激光雷达是基于激光原理工作的传感器,它通过向周围发射激光束并接收反射光束来实现对距离和方向的测量。
在室内导航系统中,我们需要选择一个适合的激光雷达,并将其安装在导航机器人上。
同时,还需添加其他传感器,如惯性导航系统、摄像头等,以提高定位和导航的准确性。
其次是传感器数据处理。
激光雷达产生的数据包含了环境中障碍物的距离和方向信息。
我们需要对这些数据进行处理,以提取出所需的信息。
常用的方法有点云数据处理和图像分析算法。
点云数据处理将激光雷达扫描得到的数据转化为三维点云模型,用于室内地图的构建和路径规划。
图像分析算法通过分析激光雷达扫描得到的图像,识别出环境中的障碍物,为导航提供决策依据。
第三是室内地图构建。
在基于激光雷达的室内导航系统中,室内地图的构建是核心任务之一。
通过激光雷达扫描得到的点云数据,可以建立室内环境的三维模型。
这种三维模型可以包括房间的布局、墙壁、家具等信息。
通过将这些信息进行处理和标记,可以形成一个完整的室内地图。
室内地图的构建是系统的基础,对导航系统的准确性和有效性至关重要。
最后是路径规划算法。
在室内导航系统中,路径规划是实现导航功能的关键所在。
通过分析室内地图和实时感知数据,系统需要计算出最优的导航路径。
常用的路径规划算法有A*算法、Dijkstra算法等。
这些算法通过权衡路径长度和时间等因素,选择出最优的路径,并指导导航机器人的移动。
综上所述,基于激光雷达的室内导航系统设计与实现是一个复杂而重要的任务。
通过合理选择和配置硬件设备,有效处理传感器数据,构建准确的室内地图,并利用先进的路径规划算法,可以实现高精度、可靠的室内导航服务。
基于C^++语言的雷达系统组件化建模与仿真
计算机测量与控制.2020.28(11) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·187 ·收稿日期:20200331; 修回日期:20200417。
基金项目:国防基础科研资助项目(JCKY2016205B006)。
作者简介:张晓东(1993),男,山西忻州人,硕士研究生,助理工程师,主要从事遥测信号处理与仿真方向的研究。
文章编号:16714598(2020)11018705 DOI:10.16526/j.cnki.11-4762/tp.2020.11.038 中图分类号:TP391.9文献标识码:A基于犆++语言的雷达系统组件化建模与仿真张晓东,李 想(中国飞行试验研究院,西安 710089)摘要:传统的基于面向过程式语言的雷达仿真系统存在功能耦合严重,运行速度慢,开发难度大的问题。
为了降低雷达仿真系统的开发难度,提高程序复用性,利用C++语言面向对象编程的特性和软件工程中组件复用的思想,设计了一种基于C++语言的雷达系统建模与仿真方法,将雷达系统各个组成部分包括资源调度、发射机、天线、回波生成、接收机、信号处理和数据处理抽象成单个功能组件分别进行开发,然后根据雷达系统工作顺序将各个组件集成在一起,实现了一个包含雷达参数设置、场景设置、数据存储和显控终端的完整的雷达仿真系统。
仿真实验结果表明组件化雷达仿真系统运行正确,目标探测误差符合要求,航迹显示正常,并且具有较好的程序复用性和扩展性,促进了现代雷达仿真的快速应用。
关键词:C++语言;组件复用;雷达;仿真犆狅犿狆狅狀犲狀狋犕狅犱犲犾犻狀犵犪狀犱犛犻犿狌犾犪狋犻狅狀狅犳犚犪犱犪狉犛狔狊狋犲犿犅犪狊犲犱狅狀犆++犔犪狀犵狌犪犵犲ZhangXiaodong,LiXiang(ChineseFlightTestEstablishment,Xi an 710089,China)犃犫狊狋狉犪犮狋:Thetraditionalradarsimulationsystembasedonprocedurallanguagehastheproblemsofseriousfunctionalcoupling,slowrunningspeedanddifficultdevelopment.Inordertoreducethedevelopmentdifficultyofradarsimulationsystemandimprovethereusabilityofprograms.UsingthecharacteristicsofC++languageobject-orientedprogrammingandtheideaofcomponentreuseinsoftwareengineering,aC++language-basedradarsystemmodelingandsimulationmethodisdesigned.Thevariouscomponentsoftheradarsystemincludingresourcescheduling,transmitter,antenna,echogeneration,receiver,signalprocessinganddataprocess ingareabstractedintosinglefunctionalcomponentsfordevelopment,andthenthevariouscomponentsareintegratedtogetheraccord ingtotheworkingorderoftheradarsystemtoachieveacompleteradarsimulationsystemincludingradarparametersetting,scenesetting,datastorageanddisplayandcontrolterminal.Thesimulationexperimentresultsshowthatthecomponentradarsimulationsystemrunscorrectly,thetargetdetectionerrormeetstherequirements,thetrackdisplayisnormal,andithasgoodprogramreuseandscalability,whichpromotestherapidapplicationofmodernradarsimulation.犓犲狔狑狅狉犱狊:C++programminglanguage;componentreuse;radar;simulation0 引言目前,世界各国都高度重视雷达仿真技术的发展。
基于Qt的雷达信息显示设计

基于Qt的雷达信息显示设计安良;刘扬;莫红飞【摘要】A novel approach for radar's information display based on the graphics view framework of Qt is presented.Linux OS gradually replaces Windows OS in many fields especially in military product because of its characteristics of open source, free of charge and sciential property right. Qt becomes the main GUI development tool of Linux OS because of its own advantages. With the radar's information display based on the graphics view framework of Qt, GUI possesses the advantage of real-time information display and simple programme structure; and with Qt Designer tool and style sheet mode provided by Qt, GUI design becomes more simple and GUI is more friendly.%提出了一种基于Qt图形化视图框架的雷达信息显示的新方法.Linux操作系统由于具有开源、免费、具有知识产权的特点,在许多领域特别是在军品领域逐步取代Windows操作系统的地位.而Qt由于自身优势,成为Linux操作系统下图形用户界面的主流开发工具.采用基于Qt图形化视图框架的雷达信息显示,使得图形用户界面具有信息显示实时、程序架构简单的优点,而且通过采用Qt Desingner工具、style sheet方式使得图形用户界面设计简单、界面友好.【期刊名称】《现代电子技术》【年(卷),期】2011(034)011【总页数】4页(P26-28,32)【关键词】Qt;图形化视图框架;图元;场景;图形化视图;样式表【作者】安良;刘扬;莫红飞【作者单位】中国电子科技集团第38研究所,安徽合肥230088;中国电子科技集团第38研究所,安徽合肥230088;中国电子科技集团第38研究所,安徽合肥230088【正文语种】中文【中图分类】TN957.51-340 引言雷达信息显示界面是雷达系统人机交互的接口。
雷达航迹数据融合算法仿真系统设计与实现

据融合算法 的性能进行分析 比较 , 最后利用该 系统对简单融合算法进行仿真分 析。
关键词 数据融合 ; 雷达航迹 ;系统仿真;MATL AB
TP 3 9 1 中 图分 类号
De s i g n a n d Re a l i z a t i o n o f S i mu l a t e S y s t e m f o r Da t a F u s i o n Ab o u t Ra d a r Da a t
口
准 关 成 态
鱼 塑 … j
本文基 于 Ma t l a b 数值计算软 件 , 设计 实现多雷达 数据
融合仿 真系统 , 给多雷达数 据融 合提 供一个 良好 的仿 真测 试 和评 估的平台 , 利用 该平 台对多 雷达数 据融合 算法 性能 进行仿 真分 析 。
j墅 竖 堕 塑 一j …
总第 2 8 4 期
2 0 1 3 年第 6 期
计算机与数字工程
C o mp u t e r& Di g i t a l E n g i n e e r i n g
V0 1 . 4 1 No . 6
9 20
雷 达 航 迹数 据 融 合 算 法 仿真 系统 设 计 与 实现
图 1 分 布 式 处 理 系 统 结 构 图
本文仿真系统即采用 了分布式结构 。
2 . 1 雷 达 航 迹 数 据 处 理
2 系统 模 型
多雷达数据融合系统 主要分 为两 类 : 集 中式 处理 系统 和分布式处 理系统 。集中式结 构将 本地雷达 的点 迹信息集 中到多雷达 处理中心 , 进行数据对准 、 点迹相关 、 数据互联 、 航 迹滤波 、 预测与综 合跟踪 。这种结 构 的最大优 点是 信息 损失小 , 但数据相关 困难 , 要求融合 中心系统有较 大数 据运 算 能力 , 数据运算量大 , 系统生存 能力 较差 ; 分布 式 的特点 是: 先 由各雷达本地数据处理单元进行航迹跟 踪 , 产生本地
跟踪雷达三维场景显示系统的设计与实现

跟踪雷达三维场景显示系统的设计与实现莫建文;邹路路;首照宇;张彤;袁华【摘要】In order to satisfy the urgent demand for detailed battlefield visualization in local wars,also in order to achieve comprehensive surveillance of targets'performance posture and movement situation in the radar field and make up for the disadvantages like being unintuitive about 3D space information on traditional radar display terminals,using OSG rendering engine,with 3D scene situation construction and man-agement as its core,the paper designs and implements a tracking radar 3D scene display system.The system implements the dynamic loading of large scale terrain model,ground fire attack display and air target real-time transformation,varied viewpoints and other fundamental tech-nologies.System operation results show that it bears good performance and can completely simulate real-time and vivid 3D scene display effects according to the radar information.%针对局部战争中对作战细节可视化的迫切需求,为实现全方位监视雷达视野中目标的表现姿态和运动情况,弥补传统雷达显示终端对三维空间信息表现不直观,画面单一等缺点,研究雷达信息的三维可视化显示,模拟真实的战场环境。
现代雷达系统分析与设计(陈伯孝)第5章

针对无源干扰的特点,采取适当的对抗措施,如提高雷达信 号处理能力、优化雷达工作参数、采用多站雷达协同探测等 ,以提高雷达在无源干扰环境下的探测性能。
复合干扰识别与对抗措施
复合干扰识别
当雷达同时受到多种类型的有源和无源干扰时,需要综合运用信号分析、特征提取和分类识别等方法 ,对复合干扰进行识别。
现状
现代雷达技术已经相当成熟,具有高分辨率、高灵敏度、多功能等特点。同时, 随着人工智能、大数据等技术的融合应用,雷达正朝着智能化、网络化方向发展 。
雷达系统组成与功能
组成
雷达系统主要由发射机、天线、接收机、信号处理机、终端显示设备等组成。其中,发射机负责产生高频电磁波; 天线用于电磁波的辐射和接收;接收机负责接收回波信号;信号处理机对回波信号进行处理以提取目标信息;终 端显示设备用于显示目标信息。
对抗措施
针对复合干扰的特点,采取综合的对抗措施,如综合运用有源和无源干扰对抗技术、采用自适应抗干 扰算法、优化雷达系统结构等,以提高雷达在复合干扰环境下的探测和抗干扰能力。
05
雷达性能评估方法
探测性能评估指标
探测距离
雷达能够探测到的目标的 最远距离,是评估雷达探 测性能的重要指标。
探测精度
雷达对目标位置、速度等 参数的测量精度,直接影 响雷达的探测性能。
利用信号处理技术对雷达回波信号进行参 数估计,如距离、速度、角度等,为后续 的目标识别和跟踪提供准确的信息。
恒虚警率检测
在复杂环境中,通过自适应调整检测 门限,保持恒定的虚警率,以提高雷 达的检测性能。
杂波抑制技术
01
02
03
动目标显示
通过相减或滤波等方法, 抑制地物杂波,提高运动 目标在雷达图像中的可见 度。
基于osg技术雷达终端显示软件设计

设计计算基于OSG技术雷达终端显示软件设计张奔1,王笛】,王淑萍2(1.中国电子科技集团第二十八研究所,江苏南京210007$.中国人民解放军32180部队,北京100072)摘要:雷达终端主要用来显示雷达视频回波数据,雷达操作员通过观察雷达终端显示的视频回波来确定发现的目标以及目标的位置#传统的雷达视频回波显示方式是利用硬件技术在光栅显示器上实现,随着计算机技术的发展,雷达终端软件化显示已经成为一种趋势#提出基于OSG技术实现雷达视频回波显示,从雷达数据接收、坐标变换、纹理生成、多线程处理等环节阐述整个雷达终端显示软件设计过程#利用OSG的多重纹理混合技术实现了雷达视频与目标信息叠加显示,采用多线程处理方式提高了软件的稳定性和负载能力,此外软件还实现了雷达回波局部三维显示#通过测试,软件从网络中接入雷达实测数据,能够实时绘制和刷新雷达视频#画面显示清晰流畅,没有出现抖动现象#关键词:OSG;雷达终端;PPI显;三维显示;坐标变换;多线程处理中图分类号:TN957文献标志码:ADesign of Radar Terminal Display Software Based on OSG TechnologyZHANG Ben1,WANG Di,WANG Shuping2(1.The28h Institute of China Electronics Technology Group Corporation,Nanjing210007,China&2.32180Troop of PLA,Beijing100072,China)Abstract:Radar terminal was mainly used to display radar video echo data,radar operator determined the target and its locationbyobservingthevideoechodisplayedbyradarterminal Thetraditionalradarvideoechodisplay modewasrealized byusinghardwaretechnologyonrasterdisplay Withthedevelopmentofcomputertechnology!thesoftwaredisplayofra-darterminalhasbecomingatrend ItproposedtorealizeradarvideoechodisplaybasedonOSGtechnology Itdescribedthe wholedesignprocessofradarterminaldisplaysoftwarefromradardatareception!coordinatetransformation!texturegener-ationandmulti-threadingprocessing The multi-texture mixing technology of OSG was used to realize the overlay display of radarvideoandtargetinformation Themulti-threadprocessingmethodimprovedthestabilityandloadcapacityofthesoft-ware Inaddition!thesoftwarealsorealizedthelocalthree-dimensionaldisplayofradarecho Throughtestingandsoftware accessingradardatathroughnetwork!thesoftwarecandrawandrefreshradarvideoinrealtime Thepictureshowedclear-lyandsmoothlywithoutanyjiterKey words:OSG,radar terminal,PPI display,three-dimensional display,coordinate transform,multi-thread processing雷达终端是雷达整机的重要组成部分,其主要用来显示雷达前端发送过来的视频和检测后的目标点航迹信息。
激光雷达点云数据处理与三维可视化平台的设计与开发

激光雷达点云数据处理与三维可视化平台的设计与开发摘要:目前,激光雷达已经广泛地应用于商用,其数据收集和处理技术也得到了极大的发展。
激光雷达扫描时,会生成许多离散数据,一般称之为点云数据。
云数据是一组由真实对象的三维坐标、色彩、亮度等数据组成的数据。
本文描述了激光雷达点数据处理的背景与特点,分析了可视化平台设计与开发的意义,最后分析了激光雷达点云数据处理及可视化平台的整体设计。
关键词:激光雷达;点云数据处理;三维可视化平台引言:当前,国内外的点云数据处理和可视化软件都是基于数据的采集,其成本相对较高,个别软件存在一定的局限性,无法完全满足用户的需要。
为此,本文设计了一种基于点云的数据处理与可视化的激光雷达数据采集与处理系统。
本文基于PCL点云的数据处理库,与程序开发平台相结合,完成了软件的数据处理,并利用Qt设计工具进行了软件界面部分的开发。
一、激光雷达点云数据处理的背景与特点1.1点云数据处理的背景激光雷达最初是作为军事用途的,后来由于科技进步和社会需要,目前已被广泛地应用于商用。
当今社会,资讯科技的飞速发展,数字技术深刻地影响着我们的生活。
现在,各种各样的大数据与我们的日常生活息息相关,它们在我们的生活中记录着各种各样的信息。
人们在三维空间中的生存数据越来越多,有研究显示,若要建立一套可持续使用的GIS,光是资料的投入就要占总投资的五至七成。
我们目前更加重视海量数据的处理技术,随着计算机硬件的不断发展,人们对数据的处理能力不断提高,三维模型技术也得到了快速的发展。
我们可以清楚地看到,在医疗、休闲娱乐、人工智能等多个方面,对三维数据的应用已成为一种趋势。
1.2点云数据处理的特点在扫描目标物体时,激光扫描仪的特征是不断地重复获取和处理数据,点云数据是由多种扫描设备所获得的,其特征如下:第一,这是一个相当庞大的数字。
在大多数情况下,扫描装置可以收集到数以万计的数据。
第二,数据更加密集。
扫描装置的扫描步长对采集数据的密度有一定的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C#\? 库 #$%&’ 操作系统
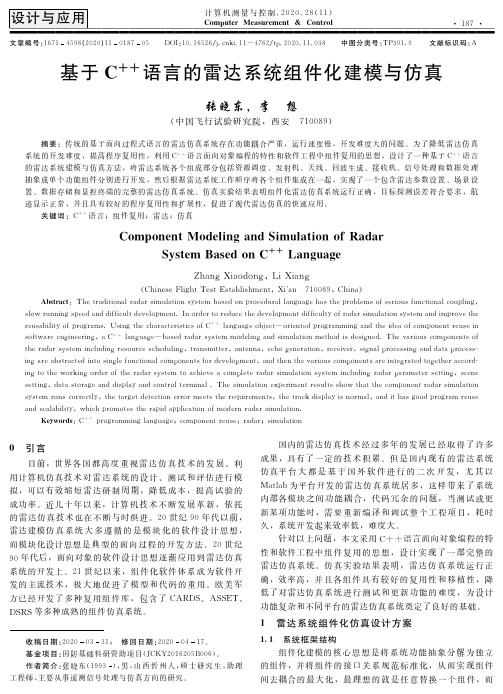
图% 雷达数据显示终端组成库及其配置关系
!"* 通用函数库
通用函数库提供了一些通用的函数,例如球 极平面投影函数、 屏幕投影函数、 坐标系旋转函数 和坐标系平移函数。
!"# 图形绘制库
图形绘制库包括多个软件模块,它们主要用 于在主窗口、子窗口和着陆窗口内绘制各种图形 元素。该库中包含了基本图形绘制模块、 高级图形 绘制模块、 飞机信息绘制模块、 机场数据 模 块 、 空 域绘制模块、 航线绘制模块、 区域绘制模 块 、 全向 信标台模块、 无方向性导航台模块、 报告点绘制模 块、 山峰绘制模块、 经纬网格绘制模块、 限制高度 模块和空中走廊模块等。
本 项 目 中 , 笔 者 尝 试 研 制 了 一 套 基 于 8(09:
& 引言
’() *)+,,(- ./01)/2 345167) 空中交通管制( 简
称 ’*. 系统, 是把计算机、 雷达、 显示器和通信等 先进的电子设备综合利用到空中交通管制方面的 一个复杂的电子系统。该系统以计算机为核心, 实 现了对雷达、 飞行计划、 气象、 人 % 机对话等信息的 自动化处理, 为管制员提供了及时、 准确的飞行情 报和管制参数, 从而大大提高了空域的利用率, 增 强了空中飞行安全, 减轻了管制人员的工作负担。
空中交通管制系统组成框图
$%&%’) 如图 # 所示, 由雷达( 获取的雷达数据 $()*) 经过雷达数据处理器( 进行相关、 滤波和融
合处理后,经过计算机局域网络分发到系统内部
+,( 和 *(() 进行显示; 飞行情报处 的各个终端( -()*) 理器( 通过民航专用通信网接收飞行情报数
据( 飞行计划和气象数据) , 经过相应处理后将其
<8A?6 ’6&&2&Y2C#ID ; !@ W6&& Q&Y2 @! EJ-T-J*+,,-.+ ;
为了提高静态航图数据的显示速度,在数据 处理软件启动时应该将所需的航图数据提前存储 到地图数据队列中。
Z 雷达数据显示终端软件模块 及其配置关系
本雷达数据显示终端软件采用了 L()7Y 操作 系统, 使用 H 语言进行开发。 该软件主要有以下函 数库组成: 图形绘制库、 地图数据库、 窗口管理库、 菜单管理库、 动态数据库、 消息队列库 、 网络通信 库、 配置函数库和通用函数库等 [ 个部分组成。图
-(() 分发到飞行计划显示终端( 和雷达数据终端 *(() ( 中进行显示, 同时该处理器也负责接收本
系统内部提交的飞行计划数据并将其发送到其它
($-) 主 的空中交通管制系统中; 数据录取终端(
要用于无间断记录并存储飞行动态数据和飞行情
-(( 是飞行计划显示终端的简称, 报数据; 该终端
主要用于显示、 创建、 编辑和修改飞行计 划 数 据 ;
的数据,并通过接收信息队列将信息传送给前台 的数据处理程序; 另外, 服务器软件也负责将发送 信息队列中的信息通过网络分发到网络中去。下 面给出了数据通信软件和服务器软件进行信息交 换时所使用的数据结构。
第 !" 卷 第 # 期
刘海涛, 宫峰勋, 马国欣: 雷达数据显示终端的系统模型与实现
#I
磁盘
!"# 服务器软件
雷达数据显示终端由两个逻辑上相互独立的 软件单元组成:位于前台的数据处理软件和位于 后台运行的服务器软件。 这两个软件通过 /4567 操 作系统提供的信息队列连接在一起。服务器软件 在计算机系统启动时自动在后台运行,该软件自
(,*) 一个数据库管理系统( , 该 终 端 使 用 *./ 数
"#$$% ) 作者简介: 刘海涛( , 男, 河北深县人, 讲师, 工学硕士, 研究方向为数据通信和新航行系统 (
#1
其它飞行情报区
中 国 民 航 学 院 学 报
!""! 年 ! 月
几个方面的功能:
-8$9) (
飞行情 报数据 雷达数据
$%&%’
#) 雷达信息显示功能; !) 气象信息显示功能; 0) 有限的飞机计划显示、 编辑功能; 1) 航图信息显示功能; 2) 飞行器管制功能; 3) 其它辅助功能;
8(09: 操作系统; >*?@; 词: 空中交通管制系统; 雷达数据显示终端; 矢量地图 D 文献标识码:
*A#$B!C 中图分类号:
E65(F0 +0G H7I267601+1(/0 /, 3(19+1(/0 E+1+ E(5I2+4 3/,1J+)6
!"# $%&!’%(, )*+) ,-./!01., 23 )1(!0&.
!""#!"$!%& 收稿日期:
操作系统的空中交通管制系统。其中, 雷达数据显 示终端就是该空中交通管制系统中的一个重要组 成部分。
" 空中交通管制系统
首先简要介绍空中交通管制系统的组成及各 部分的功能。图 " 给出了一个典型的空中交通管 制系统。
’’’’基金项目: 中国民航总局, 西北空管局和中国民航学院合作项目 !
<3 &4 54%66&7 2%.%/-8-.’ 9(::-/- , 93 #9 , 5&%.;&. =&&=&& , 9<&.% K
!"#$%&’$: 3(19+1(/0 E+1+ E(5I2+4 <3EEK (5 +0 (7I/)1+01 -/7I/0601 /, ’() *)+,,(- ./01)/2 345L 167! D4 +0+245(0F 1M6 ,90-1(/0 /, 3(19+1(/0 E+1+ E(5I2+4 1M6 I+I6) G6,(065 1M6 +)-M(16-19)6 /, 3(19+1(/0 E+1+ E(5I2+4 5/,1J+)6 +0G ,9)1M6) 6:I+1(+165 /0 1M6 ,90-1(/0 /, 6+-M 5/,1J+)6 7/GL 926 /, 3(19+1(/0 E+1+ E(5I2+4! ()* +,%-#: ’*.; 3EE; 8(09:; >*?@; N6-1/) 7+I
0 雷达数据显示终端的体系结构
本部分依据第 ! 部分分析的结果,给出了雷 达数据显示终端软件的逻辑组成及其相互间的关
*(( 是雷达数据显示终端的简称,管制员通过该 +,( 是控制及监视显示终端的简称,其主要用于
监控和管理系统内部的各个终端;另外为了便于 编辑和输入系统所需的各种数据,系统还提供了
终端设备提供的数据,为飞行 器 提 供 管 制 服 务 ; 系, 如图 ! 所示。
!"( 网络通信库
网络通信库实现了对 #$%&’ 操作系统网络功
网 络 通 信 库 消 息 队 列 库 配 置 函 数 库 通 用 函 数 库
图形绘制库
库
地 图 数 据 库
窗 口 管 理 库
菜 单 管 理 库
动 态 数 据 库
能的封装,其他模块可以直接使用该库函数进行 网络通信。
!") 配置函数库
<’:;?2 ?:2 ; <’:;?2 <5; <’:;?2 N5;
!@ -:2(27%& @! !@ .6;7)% ,4&&% @! !@O&62(8?: ,4&&% @!
<8A?6 8M(CID ; !@ H;)26;::&6 P76(5%(82(;) /)%(8?2;6 @! <8A?6 234&CID ; !@ -(686?’2 Q34& @! <8A?6 KC!D ; <’:;?2 8’: ; <()2 A%< ; !@ R?S& Q76B7:&)8& H?2&<;63 @! !@ H:&?6&% W:(<A2 L&N&: @! !@ H:&?6&% X&?%()< @! <8A?6 %?CID ; !@ T&52()?2(;)U5A;K 2A& 6&8&(N&6V5 HP/ @!
雷达数据显示终端的系统模型与实现
刘海涛;宫峰勋;马国欣
< 中国民航学院 空管学院, 天津 =&&=&& )
摘要: 介绍了空中交通管制系统的组成和工作原理, 对空中交通管制系统中雷达数据显示终端 软件的功能进行了分析, 并在此基础上给出了雷达数据显示终端软件的体系结构, 最后详细说 明了雷达数据显示终端软件各个模块的组成和功能。 关 键
! !" " ! ) # !""! + ! ,
$ % & ’ ( ) ( *
"#$!"# %#!$
&’()%*+,’-,./"/+,*"/*0/’%,(%/"1)2/03,’-,.4/%*,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,-567897:-"##"
!""!/")*""),*%& !"#$%)"")*+""" .