差分&xnet
差分线的设置,相对等长线以及xnet的设置
不同的信号对走线的要求不同,差分线为了抗干扰能力强,要求两根信号线在一定范围内等长等间距。而现对等长线要求信号的相对延时在一定的范围内必须比较接近。
这个设置在原理图阶段可以设置,不过现在要讲的主要是在allegro环境下的设置。
一差分线的设置
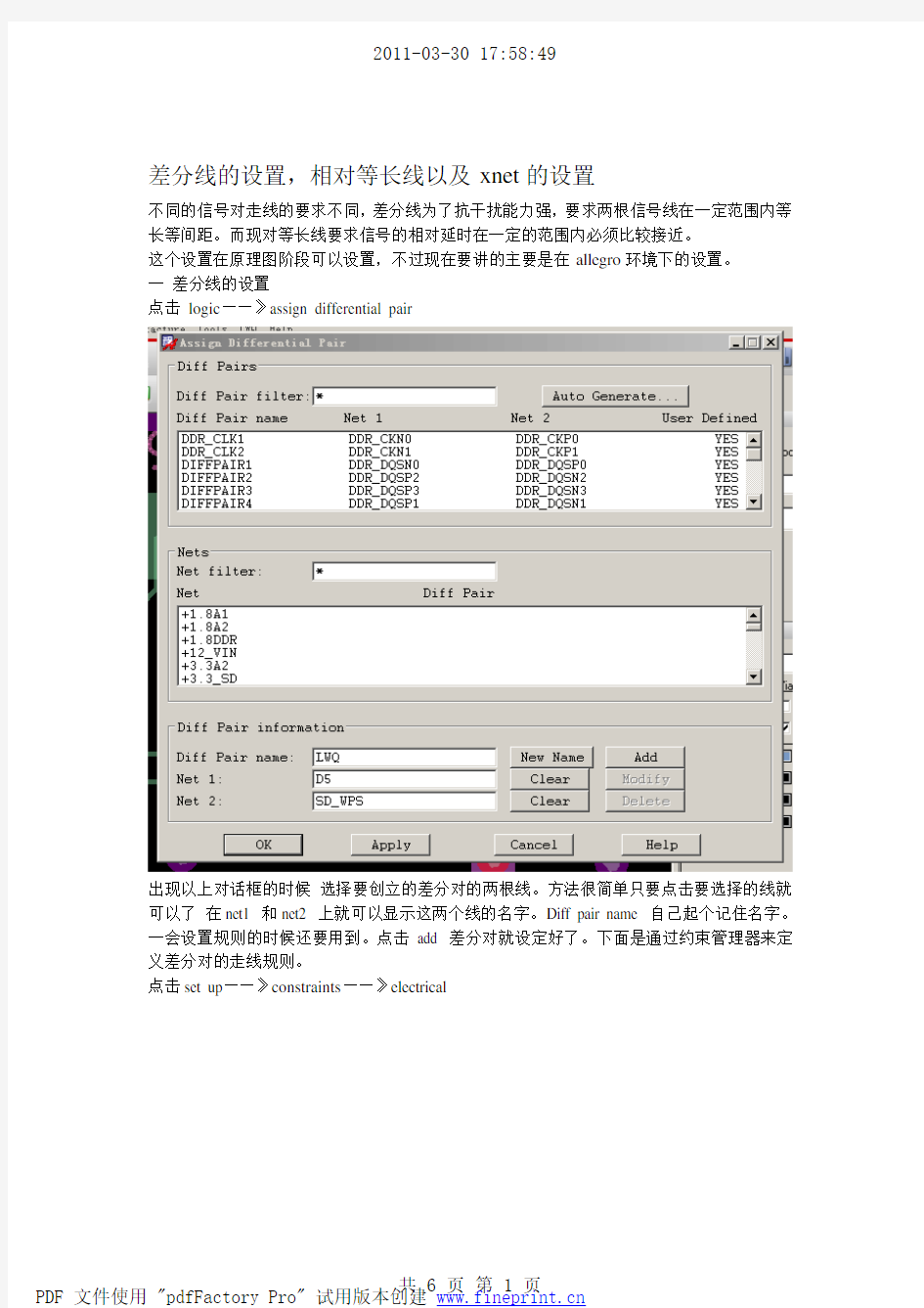
点击logic——》assign differential pair
出现以上对话框的时候选择要创立的差分对的两根线。方法很简单只要点击要选择的线就可以了在net1 和net2 上就可以显示这两个线的名字。Diff pair name 自己起个记住名字。一会设置规则的时候还要用到。点击add 差分对就设定好了。下面是通过约束管理器来定义差分对的走线规则。
点击set up——》constraints——》electrical
选择net ——》differential pair 找到我们刚才设定的差分对名字lwq4 规则设定为5/7 Ok
二等长线以及xnet 的设置
许多等长线要求的场合往往等长线里还包含电阻,如果不用xnet 就需要画两组等长线,给布线带来很大的工作量。特别是布线空间有限的时候。
1.设置xnet
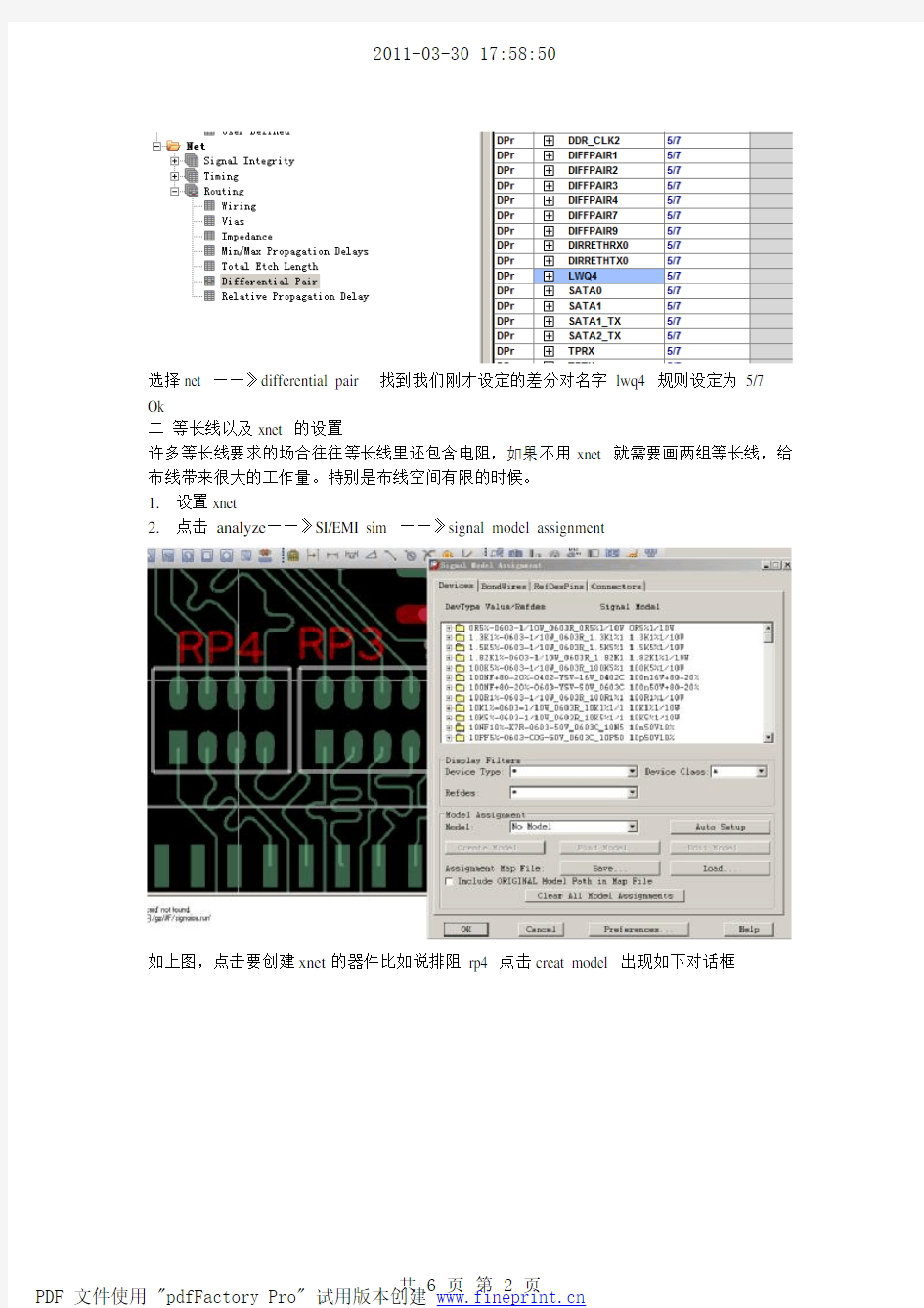
2.点击analyze——》SI/EMI sim ——》signal model assignment
如上图,点击要创建xnet的器件比如说排阻rp4 点击creat model 出现如下对话框
点击ok 出现如下对话框
这里value 是仿真的时候用的阻值我们可以随便填个值比如说10 不过记住要这组等长线所有value 都要相等。Single pins 这个非常重要,现在我们用的是排阻他有八个引脚。就是说有四根线输入输出排阻,那么 1 脚和8脚对应第一根线的输入输出,那么2 脚和7脚对应第二根线的输入输出,那么3 脚和6脚对应第三根线的输入输出,那么4脚和5脚对应第四根线的输入输出,所以single pins 就对应 1 8 2 7 3 6 4 5 。如果是两个引脚的电阻那就是1 2 了。点击ok 回到signal model assignment 界面点击ok 这样xnet 就设置好了。
下面设置等长线组,需要打开约束管理器。
点击set up——》constraints——》electrical
找到net ——》routing——》relative propagation delay 找到我们要设置等长线的网络右键单击creat——》pin par
Frist pins 选择开始输出的地方second pins 选择信号终结的那段单击ok 同样方法建立其他网络的pin par
Ok
选中说有的已创建好的pin par
黑色的部分就是然后右键单击creat ——》match group
在match group 输入等长线组的名字点击ok
这样等长线就设置好了接下来是设置规则
还是net ——》routing——》relative propagation delay
点击delta:tolerance 下的按键
Default unit 选择mil 点击ok
在一个蓝色字体的global 填入0:15mil 最大差距为15
点击analye——》analysis moldes
选择electrical modes 里面有个realative propagation delay 把on 勾上按f9 分析
接下来就是去拉等长线了。
有限差分法
有限差分法 一、单变量函数: 用中心差分法(matlab程序见附录)计算结果如下: 图1 中心差分法
表1 数据对比 二、一维热传导: 在此取φ(x)=0,g1(t)= g2(t)=100-100*exp(-t)
问题描述: 已知厚度为l的无限大平板,初温0度,初始瞬间将其放于温度为100度的流体中,流体与板面间的表面传热系数为一常数。 试确定在非稳态过程中板内的温度分布。 (1)显式差分法: 图3 显式差分法 (2)隐式差分法: 图4 隐式差分法
小结:显式格式仅当时格式是稳定的。(其中称为网格比) 隐式格式从k层求k+1层时,需要求解一个阶方程组。而且隐式格式的稳定性对网格比没有要求,即为绝对稳定的。 三、Possion方程: 取f=1,R=1 图5差分法
图6 误差小结:观察误差曲面,其绝对误差数量级为
附Matlab程序: 第1题: %===========================Boundary Value Problem 1 clear;clc; A=[-2.01 1 0 0 0 0 0 0 0; 1 -2.01 1 0 0 0 0 0 0; 0 1 -2.01 1 0 0 0 0 0; 0 0 1 -2.01 1 0 0 0 0; 0 0 0 1 -2.01 1 0 0 0; 0 0 0 0 1 -2.01 1 0 0; 0 0 0 0 0 1 -2.01 1 0; 0 0 0 0 0 0 1 -2.01 1; 0 0 0 0 0 0 0 1 -2.01;]; c1=[0.1;0.2;0.3;0.4;0.5;0.6;0.7;0.8;0.9]; C=0.01*c1-1*[0;0;0;0;0;0;0;0;1]; y=A\C; x=0:0.1:1; yn=[0;y;1]; ye=2*(exp(x)-exp(-x))/(exp(1)-exp(-1))-x; figure(1); plot(x,yn,'*',x,ye); legend('numerical solution','exact solution') xlabel('x','fontsize',20); ylabel('y','fontsize',20); set(gca,'fontsize',18); figure(2); err=abs(ye'-yn); plot(x,err); legend('error') xlabel('x','fontsize',20); ylabel('y','fontsize',20); set(gca,'fontsize',18); 第2题: %========================Boundary Value Problem 1_Explicit %显式 clear;clc l=20;%板厚 h=1;%步长 J=l/h; T=50;%时间
珞琪rtk无人机后差分数据处理案例
RTK无人机数据处理案例 本次工程的主要内容是通过机载RTK获取无人机在飞行过程中的持续观察数据,将RTK数据导入差分后处理软件(PPK软件)RockyPPS进行处理,获取无人机拍照时的高精度POS数据(即无人机在拍照时的三维地理信息),再将POS数据与拍摄照片导入影像后处理软件PhotoMetric中完成三维重建工作,得到拍摄区域内的三维地理信息,将其与在地面预先测算好的检校点进行比较分析,得到整体三维重建的精度情况。 一、工程概况 本次作业区域大小为1000米乘800米,飞行高度为370米,拍摄相片数量为76张,RTK基站信息格式为UniCore格式,RTK流动站信息格式为OEMV,预设的检校点数量为20个,检校点坐标系为国家2000大地坐标系。 pt0546067.06573370255.36623.4217 pt1546249.152********.49715.4442 pt2546302.92513370959.91514.676 pt3546077.69143370976.09419.129 pt4546057.95183370642.55119.5544 pt5545899.63453370808.34422.7109 pt6545840.7833371091.50222.6866 pt7546440.97263370969.24411.7632 pt8546439.66423370825.79111.031 pt9546452.0933370744.30510.5249 pt10546458.87263370674.86810.1986 pt11546469.47463370537.539.3458 pt12546510.29083370408.2988.5436
单基准站模式下多种GNSS差分数据的传输
单基准站模式下多种GNSS差分数据的传输 平先才,陈星荣,梁向棋,吕娇,舒晓明 (长江航道测量中心,湖北 武汉 430000) 摘 要:本文针对单基准站单一GNSS差分数据的传输问题,对拥有内置无线模块的天宝SPS985做了分析和研究,根据仪器的通讯数据格式以及其所支持的协议设置实现了单基准站模式下多种GNSS差分数据的传输,并做了利用4G路由器为天宝SPS985基准站提供网路信号的实验,实验表明,该方法解决了单基准站模式下多种GNSS差分数据不兼容的问题,实现了使用天宝SPS985网络基站时,市场上主流的GNSS接收机间的多种差分数据传输。该技术可以广泛应用于测绘领域。 关键词:单基准站模式;多种GNSS差分数据;多种GNSS接收机;4G无线路由 中图分类号:P228.4 文献标识码:A 文章编号:1006—7973(2018)8-0043-02 DOI编码:10.13646/https://www.360docs.net/doc/8c8159269.html,ki.42-1395/u.2018.08.019 从上个世纪70年代开始,随着信息技 术的高速发展,卫星导航定位(GNSS)精 度的一步步提升,使其在建筑、渔业、气 象、电信、测绘等行业得到大幅度深层次 地扩展应用。由于GNSS具有高精度、全 天候、高效率、多功能、操作简便等特点, 在常规的大比例尺地形图测绘项目中,利 用GNSS测量技术很大程度上提高了测量 作业的效率和可靠性,大大降低技术人员 的作业强度。 但是,在实际生产测绘作业过程中, 当我们遇到GNSS接收机品牌类型多但是 同一型号仪器的数量少的时候,往往需要 架设两个甚至多个基准站,这个时候整个 过程就略显繁琐,也会浪费一部分人力物 力资源。于是设想,使用其中某一个GNSS 接收机架设基准站,其他各种品牌型号的 GNSS接收机作为流动站都能正常接收差分 信号,并能保障其日常作业精度等要求, 该功能的实现,可以为技术人员提供更加 便捷高效的测绘作业。 1 常用GNSS接收机介绍 全球导航卫星系统(Global Navigation Satellite System),简称GNSS,它是所有全球导航卫星系统及其增强系统的集合名词,是利用全球的所有导航卫星所建立的覆盖全球的全天侯无线电导航系统。目前,GNSS包含了美国的GPS、俄罗斯的GLONASS、中国的Compass(北斗)、欧盟的Galileo系统,SBAS 广域差分系统,DORIS星载多普勒无线电定轨定位系统,QZSS 准天顶卫星系统,GAGAN GPS静地卫星增强系统等,可用的卫星数目达到100颗以上。它利用了众多卫星导航系统中的一个或多个系统进行导航定位,并同时提供卫星的完备性检验信息(Integrity Checking)和足够的导航安全性预警信息。 表1列出了5种市场上常用的GNSS接收机型号的通讯数据格式及支持模式。 从表1可以看出,不同品牌的GNSS接收机和同一品牌不同型号的GNSS接收机,它们通讯数据格式及支持模式都不一样。在表1品牌型号的GNSS接收机中只有天宝系列可以支持多种协议、多种数据格式信号,但是在使用天宝系列架设网络基站时,差分数据通过手簿网络上传服务器进行转发,在这种测量模式 型号通讯数据格式支持模式 天宝R8差分数据格式CMR+、CMRx、RTCM2.1、RTCM2.3、RTCM3.0、 RTCM3.1、RTCM3.2 网络模式支持支持Trimble、Pacific Crest和SATEL无线电协议 天宝SPS985 差分数据格式CMR 、CMR+、CMRx、RTCM3、RTCM2.X 网络模式支持支持TCP/IP协议,支持NTRIP协议 中海达H32 差分数据格式CMR、RTCM2.X、RTCM3.0、RTCM3.2 网络模式支持支持UDP和TCP/IP协议,支持NTRIP协议 南方银河1差分数据格式CMR+、CMRx、RTCM2.1、RTCM2.3、RTCM3.0、 RTCM3.1、RTCM3.2 网络模式支持VRS、FKP、MAC,支持NTRIP协议 莱卡GS15 差分数据格式Leica、Leica4G、CMR、CMR+、RTCM2.1/2.3/3.0/3.1 网络模式支持支持TCP/IP协议,支持NTRIP协议 表1 各品牌型号GNSS接收机的主要通讯数据格式及支持模式 C W T中国水运2018·0843
偏微分中心差分格式实验报告(含matlab程序)
二阶常微分方程的中心差分求解 学校:中国石油大学(华东)理学院 姓名:张道德 一、 实验目的 1、 构造二阶常微分边值问题: 22,(),(), d u Lu qu f a x b dx u a u b αβ?=-+=<
11122 222222333222122112 100121012010012 00N N N u f q h h u f q h h h u f q h h h q u f h h ---???? ??+-???? ??? ???? ???????-+-? ?????? ???????????=-+? ?????? ???????????-???? ????????-+????? ?? ????? 可以看出系数矩阵为三对角矩阵,而对于系数矩阵为三对角矩阵的方程组可以用“追赶法”求解,则可以得出二阶常微分方程问题的数值解。 四、 举例求解 我们选取的二阶常微分方程边值问题为: 2 22242,01 (0)1,(1), x d u Lu x u e x dx u u e ?=-+=-<
差分法
第三章 有限差分法 函数()f x ,x 为定义在区间[]a b ,上的连续变 量。将区间[]a b ,等分成n 份,令()h b a n =-称为 步长,x 在这些离散点处的取值为 x a ih i =+ ()i n =01,,, 称为节点。函数()f x 在这些节点处的差值 ()()()()()() f x h f x f x f x h f x h f x h i i i i i i +---+--??? ?? (5-1) 分别称为一阶向前、向后和中心差分,可以用它 们作为函数()f x 在x i 处的微分近似值。这些差分 与相应x 区间的比值 ()()[] ()() [ ] ()()[] 1 1 1 2h f x h f x h f x f x h h f x h f x h i i i i i i +---+--?????? ??? (5-2) 分别称为一阶向前、向后和中心差商,可以用它 们作为函数()f x 在x i 处的导数近似值。完全类似 地可以定义高阶差商,例如常用的二阶中心差商 ()()()[] 1 22h f x h f x f x h i i i +-+- (5-3) 可以作为函数()f x 在x i 处的二阶导数近似值。 §3.1 常微分方程初值问题的差分解法 考虑电学中的一个问题:如图5-1。研究 电容器上的电荷随时间的变化规律。 图5-1 RC 放电回路 这个问题对应的微分方程及其定解条件为:
d d Q t Q RC Q Q t =-=??? ??=00 (5-4) 这是一阶微分方程的初值问题,它的解析解为 Q Q e t RC =-0 (5-5) 一、欧拉(Euler )折线法 求解下列普遍形式的一阶微分方程的初值 问题: ()[]()'=∈=?????y f x y x a b y a y ,,0 (5-6) 首先,将区间[]a b ,等分n 份,取值 a x x x b n =<<<=01 ,步长h x x i i =-+1。 然后,用一阶向前差商近似一阶导数,即 ()() ()()[] y x y x h y x f x y x i i i i i +-≈'=1, (5-7) 简记()y x y i i ≈,则式(5-7)可以写成差分格式: ()y y h f x y i i i i +=+?1, ()i n =-011,,, (5-8) 此即向前欧拉差分格式。这是一个递推计算格式, 从区间左端点即式(5-6)中的初始条件出发,按式 (5-8)依次可以算到区间右端点,得到的 y y y n 12,,, 就是原方程解()y x 的近似值。 应用式(5-8)计算RC 放电方程(5-4),按SI 单 位制,取Q 010=,RC =8,时间步长h =1,计 算结果如下:
编制中心差分法程序报告(结构工程研究生作业)
中心差分法计算单自由度体系的动力反应 北京工业大学结构工程 组员:胡建华 S201204111 马 恒 S201204112 陈相家S201204083 张力嘉S201204022 0前言 时域逐步积分法是数值分析方法,它只假设结构本构关系在一个微小的时间步距内是线性的。时域逐步积分法是结构动力问题中一个得到广泛研究的课题,并在结构动力反应计算中得到广泛应用。由于引进的假设条件不同,可以有各种不同的方法,比如中心差分法,线性加速度法,平均常加速度法,Wilson-θ法等,其中中心差分法精度最高。在本文中,通过编制中心差分法计算单自由度体系的动力反应的程序来了解其应用及稳定性。 1中心差分法原理 中心差分法的基本思路:是将运动方程中的速度向量和加速度向量用位移的某种组合来表示,将微分方程组的求解问题转化为代数方程组的求解问题,并在时间区间内求得每个微小时间区间的递推公式,进而求得整个时程的反应。 中心差分法只在相隔t ?一些离散的时间区间内满足运动方程,其基于有限差分代替位移对时间的求导(即速度和加速度),如果采用等时间步长,t t i ?=?,则速度与加速度的中心差分近似为: t u u u i i ?-= -+? 21 1 (a) 2 1 12t u u u u i i i ?+-= -+? ? (b) 而离散时间点的运动为 )(),(),(i i i i i i t u u t u u t u u ? ?? ?? ? === ( =i 0,1,2,3,……) 由体系运动方程为:0)()()(=++? ? ?t ku t u c t u m i (c) 将速度和加速度的差分近似公式(a )和式(b )代入式(c )可以得到i t 时刻的运动方程: 0221 12 11=+?-+?+--+-+i i i i i i ku t u u c t u u u m (d )
中心差分法计算程序编程.doc
中心差分法计算程序编程 姓名:张泽伟 学号: 电话: 一、中心差分法程序原理说明 1.1 中心差分法思路 中心差分法的基本思路:是将运动方程中的速度向量和加速度向量用位移的某种组合来表示,将微分方程组的求解问题转化为代数方程组的求解问题,并在时间区间内求得每个微小时间区间的递推公式,进而求得整个时程的反应。 1.2 中心差分法原理 中心差分法只在相隔t ?一些离散的时间区间内满足运动方程,其基于有限 差分代替位移对时间的求导(即速度和加速度),如果采用等时间步长,t t i ?=?, 则速度与加速度的中心差分近似为: t u u u i i ?-= -+?211 (a) 21 12t u u u u i i i ?+-= -+?? (b) 而离散时间点的运动为 ) (),(),(i i i i i i t u u t u u t u u ??????=== ( =i 0,1,2,3,……) 由体系运动方程为:0 )()()(=++???t ku t u c t u m i (c) 将速度和加速度的差分近似公式(a )和式(b )代入式(c )可以得到i t 时 刻的运动方程: 02211211=+?-+?+--+-+i i i i i i ku t u u c t u u u m (d ) 在(d )式中,假设i u 和1-i u 是已知的,即在i t 及i t 以前时刻的运动已知,则 可以把已知项移到方程的右边,整理得到: 12212)2()2()2(-+?-?-?--=?+?i i i u t c t m u t m k u t c t m (e)
由式(e )就可以根据i t 及i t 以前时刻的运动,求得1+i t 时刻的运动,如果需 要可以用式(a )和式(b )求得体系的速度和加速度。 1.3 初始条件转化 假设给定的初始条件为 ),0(), 0(00? ?==u u u u (g ) 由式(g )确定1-u 。在零时刻速度和加速度的中心差分公式为: t u u u ?-= -?2110 (h ) ` 21 0102t u u u u ?+-=-?? (i ) 将式(i )消去1u 得:020012???-?+?-=u t u t u u (j ) 而零时刻的加速度值0??u 可以用t =0时的运动方程 0000=++???ku u c u m 确定 即 )(1000ku u c m u --=?? ? (k ) 这样就可以根据初始条件 00,?u u 和初始荷载0P ,就可以根据上式确定1-u 的 值。 1.4 中心差分法编程思路 ① 基本数据准备和初始条件计算: )(1000ku u c m u --=?? ? 020012??? -?+?-=u t u t u u ② 计算等效刚度和中心差分计算公式中的相关系数: t c t m k ?+?=22
中心差分法在单自由度中的应用
中心差分法求解单自由度体系的自由振动问题 前言 时域逐步积分法是根据运动方程,引进某些假设,建立由t 时刻状态向量i u 、i u ?、i u ? ?到t +t ?时刻的状态向量1+i u 、1+?i u 、1+??i u 的递推关系,从而从t =0时刻的初始状态向量0u 、0?u 、0? ?u 出发,逐步求出各时刻的状态向量,由于引进的假设条件不同,可以有各种不同的方法,下面主要介绍一种时域逐步积分方法-中心差分法。 中心差分法(central difference method)原理[1] 中心差分法的基本思路:是将运动方程中的速度向量和加速度向量用位移的某种组合来表示,将微分方程组的求解问题转化为代数方程组的求解问题,并在时间区间内求得每个微小时间区间的递推公式,进而求得整个时程的反应。 中心差分法只在相隔t ?一些离散的时间区间内满足运动方程,其基于有限差分代替位移对时间的求导(即速度和加速度),如果采用等时间步长,t t i ?=?,则速度与加速度的中心差分近似为: t u u u i i ?-=-+?211 (a) 2 112t u u u u i i i ?+-=-+?? (b) 而离散时间点的运动为 )(),(),(i i i i i i t u u t u u t u u ??????=== ( =i 0,1,2,3,……) 由体系运动方程为:0)()()(=++???t ku t u c t u m i (c) 将速度和加速度的差分近似公式(a )和式(b )代入式(c )可以得到i t 时刻的运动方程: 02211211=+?-+?+--+-+i i i i i i ku t u u c t u u u m (d ) 在(d )式中,假设i u 和1-i u 是已知的,即在i t 及i t 以前时刻的运动已知,则可以把已知项移到方程的右边,整理得到: 12212)2()2()2(-+?-?-?--=?+?i i i u t c t m u t m k u t c t m (e)
中心差分法计算单自由度体系动力反应样本
中心差分法计算单自由度体系动力反应 1, 程序说明 中心差分法基于有限元查分代替位移对时间的求导( 即速度和加速度) 。如果采用等时间步长, i t t ?=?, 则速度和加速度的中心查分近似为 .11..11222i i i i i u u u t u u u u t +-+--=?-+=? 体系的运动方程为 ... ()()()()mu t cu t ku t P t ++= 联立以上三式, 得 1111222i i i i i i i u u u u u m c ku P t t +-+--+-++=?? 上式中, 假设i u 和1i u -是已知的, 即i t 和i t 以前时刻的运动已知, 则能够把已知 项移到方程的右边, 整理得 11222222i i i i m c m m c u P k u u t t t t t +-??????+=---- ? ? ???????????? 这样, 就能够计算体系任意时刻的位移, 速度和加速度。 2, 程序框图
3, 程序清单 %计算等效刚度和中心差分法计算公式中的系数 clear, m=17.5e3;k=875500;c=35000;aa=input(' 请选择时间步长 1 or 2 or 3 \n 1: dt=0.02 ; 2 : dt=0.3 ; 3: dt=其它\n'); if aa==1 dt=0.02; end if aa==2 dt=0.3; end if aa==3 dt=input('请输入时间步长\n dt= ') end t=0:dt:1.2; n=fix(1.2/dt+1);kr=m/(dt * dt) + c/(2 * dt); a=k-2 * m/(dt * dt); b=m/(dt * dt)-c/(2 * dt); %求力p p1=0:1:40;p2=39:-1:0;one=ones(1,40);p3=(one<0);p=1000*[p1,p2,p3]; for i=1:n if t(i)<=0.4,p(i)=100000*t(i); end if t(i)>0.4&&t(i)<=0.8,p(i)=8*t(i); end if t(i)>0.8,p(i)=0; end
对流扩散方程有限差分方法
对流扩散方程有限差分方法 求解对流扩散方程的差分格式有很多种,在本节中将介绍以下3种有限差分格式:中心差分格式、Samarskii 格式、Crank-Nicolson 型隐式差分格式。 3.1 中心差分格式 时间导数用向前差商、空间导数用中心差商来逼近,那么就得到了(1)式的中心差分格式]6[ 2 1 11 1122h u u u v h u u a u u n j n j n j n j n j n j n j -+-+++-=-+-τ (3) 若令 h a τ λ=,2h v τ μ=,则(3)式可改写为 )2()(2 111111n j n j n j n j n j n j n j u u u u u u u -+-+++-+--=μλ (4) 从上式我们看到,在新的时间层1+n 上只包含了一个未知量1 +n j u ,它可以由时间层n 上的值n j u 1-,n j u ,n j u 1+直接计算出来。因此,中心差分格式是求解对 流扩散方程的显示格式。 假定),(t x u 是定解问题的充分光滑的解,将1 +n j u ,n j u 1+,n j u 1-分别在),(n j t x 处 进行Taylor 展开: )(),(),(211 ττO t u t x u t x u u n j n j n j n j +??? ?????+==++ )(2),(),(3 22211 h O x u h x u h t x u t x u u n j n j n j n j n j +? ???????+????????+==++ )(2),(),(3 22211 h O x u h x u h t x u t x u u n j n j n j n j n j +????????+????????-==-- 代入(4)式,有 2 1 11 1122),(h u u u v h u u a u u t x T n j n j n j n j n j n j n j n j -+-+++---+-= τ )()()(2222 h O v x u v h O a x u a O t u n j n j n j ?-????????-?+????????++????????=τ )()()(222h O v a O x u v x u a t u n j n j n j ?-++????????-??? ?????+????????=τ
中心差分法
(1)中心差分法求解反应谱程序: clc load('GM.txt'); %输入原始数据 n=length(GM); t=0.01; Tn=0.02:0.02:4; m=length(Tn); MaxAcc=zeros(1,m); MaxVel=zeros(1,m); MaxDis=zeros(1,m); Damp=0.05; %确定阻尼比 mm=1; for T=0.02:0.02:4 %中心差分法求解结构响应时程 Dis=zeros(1,n+1); Vel=zeros(1,n); Acc=zeros(1,n); w=2*pi/T; c=2*w*Damp; k=w*w; Acc(1,1)=-1*GM(1,2); Vel(1,1)=0; Dis(1,2)=0; Dis(1,1)=(t^2)/2*Acc(1,1); for i=2:1:n Ke=1/(t^2)+c/(2*t); P=-1*GM(i-1,2)-(1/(t*t)-c/(2*t))*Dis(1,i-1)-(k-2/(t*t))*Dis(1,i); Dis(1,i+1)=P/Ke; end for ii=2:1:n-1 Vel(ii)=(Dis(ii+2)-Dis(ii))/(2*t); Acc(ii)=(Dis(ii+2)-2*Dis(ii+1)+Dis(ii))/(t*t)+GM(ii); end MaxAcc(1,mm)=max(abs(Acc)); %求解确定周期下结构最大响应MaxVel(1,mm)=max(abs(Vel)); MaxDis(1,mm)=max(abs(Dis)); mm=mm+1; end figure(1) %绘制反应谱 plot(Tn,MaxAcc(1,:)) title('加速度反应谱') xlabel('自振周期(s)') ylabel('最大绝对加速度Sa(g)')
有限差分方法概述
有限差分法(Finite Difference Method,简称FDM)是数值方法中最经典的方法,也是计算机数值模拟最早采用的方法,至今仍被广泛运用。该方法将求解域划分为差分网格,用有限个网格节点代替连续的求解域。有限差分法以Taylor级数展开等方法,把控制方程中的导数用网格节点上的函数值的差商代替进行离散,从而建立以网格节点上的值为未知数的代数方程组。该方法是一种直接将微分问题变为代数问题的近似数值解法,数学概念直观,表达简单,是发展较早且比较成熟的数值方法。对于有限差分格式,从格式的精度来划分,有一阶格式、二阶格式和高阶格式。从差分的空间形式来考虑,可分为中心格式和逆风格式。考虑时间因子的影响,差分格式还可以分为显格式、隐格式、显隐交替格式等。目前常见的差分格式,主要是上述几种形式的组合,不同的组合构成不同的差分格式。差分方法主要适用于有结构网格,网格的步长一般根据实际地形的情况和柯朗稳定条件来决定。 构造差分的方法有多种形式,目前主要采用的是泰勒级数展开方法。其基本的差分表达式主要有三种形式:一阶向前差分、一阶向后差分、一阶中心差分和二阶中心差分等,其中前两种格式为一阶计算精度,后两种格式为二阶计算精度。通过对时间和空间这几种不同差分格式的组合,可以组合成不同的差分计算格式。 下面我们从有限差分方法的基本思想、技术要点、应用步骤三个方面来深入了解一下有限差分方法。 1.基本思想 有限差分算法的基本思想是把连续的定解区域用有限个离散点构成的网格来代替,这些离散点称作网格的节点;把连续定解区域上的连续变量的函数用在网格上定义的离散变量函数来近似;把原方程和定解条件中的微商用差商来近似,积分用积分和来近似,于是原微分方程和定解条件就近似地代之以代数方程组,即有限差分方程组,解此方程组就可以得到原问题在离散点上的近似解。然后再利用插值方法便可以从离散解得到定解问题在整个区域上的近似解。在采用数值计算方法求解偏微分方程时,再将每一处导数由有限差分近似公式替代,从而把求解偏微分方程的问题转换成求解代数方程的问题,即所谓的有限差分法。 2.技术要点 如何根据问题的特点将定解区域作网格剖分;如何把原微分