电力拖动自动控制系统Matlab仿真实验报告
电力拖动自动控制系统
---Matlab仿真实验报告
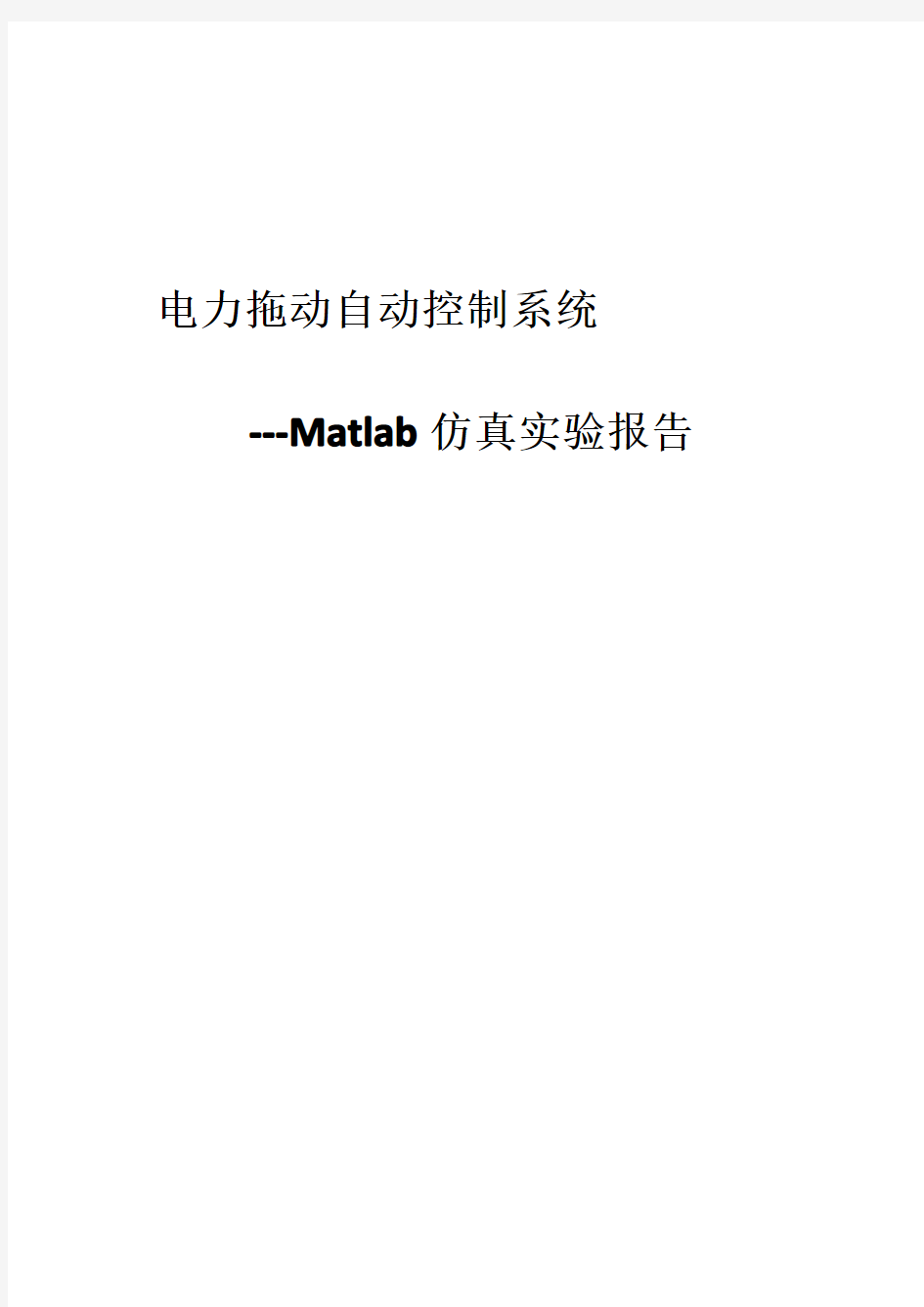
实验一二极管单相整流电路
一.【实验目的】
1.通过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;
2.通过实验进一步加深理解二极管单向导通的特性。
图1-1二极管单相整流电路仿真模型图
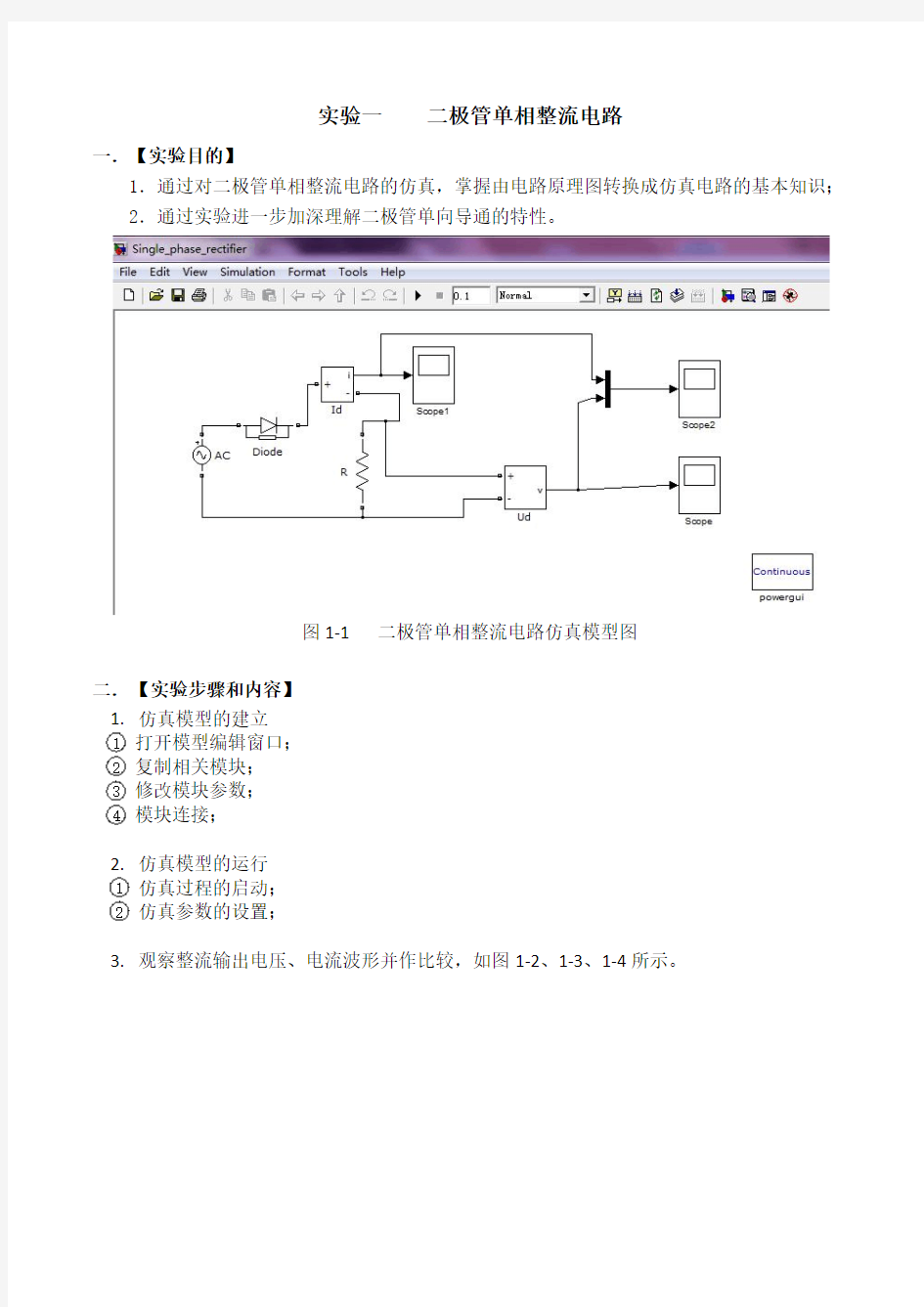
二.【实验步骤和内容】
1.仿真模型的建立
1打开模型编辑窗口;
2复制相关模块;
3修改模块参数;
4模块连接;
2.仿真模型的运行
1仿真过程的启动;
2仿真参数的设置;
3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】
由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2整流电压输出波形图图1-3整流电流输出波形图
图1-4整形电压、电流输出波形图
实验二三相桥式半控整流电路
一.【实验目的】
1.通过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;
2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:
(1)交流电压源参数U=100V,f=25Hz,三相电源相位依次延迟120°。
(2)晶闸管参数Rn=0.001Ω,Lon=0.0001H,Vf=0V,Rs=50Ω,Cs=250e-6F。
(3)负载参数R=10Ω,L=0H,C=inf。
(4)脉冲发生器的振幅为5V,周期为0.04s(即频率为25Hz),脉冲宽度为2。
图2-1三相桥式半控整流电路仿真模型图
当α=0°时,设为0.0033s,0.0166s,0.0299s。
图2-2α=0°整流输出电压等波形图
当α=60°时,触发信号初相位依次设为0.01s,0.0233s,0.0366s。
图2-3α=60°整流输出电压等波形图
三.【实验总结】
三相可控整流电路中,最基本的是三相半波可控整流电路,应用最为广泛的是三相桥式全控整流电路、双反星形可控整流电路以及十二脉波可控整流电路等,均可在三相半波的基础上进行分析。在电阻负载时,当,负载电流连续(其,最大);当,负载电流断续,电阻负载时的移相范围为0~150°,阻感负载时U
d
的移相范围为0~90°。
实验三三相桥式全控整流电路
一.【实验目的】
1.加深理解三相桥式全控整流及有源逆变电路的工作原理;
2.研究三相桥式全控整流电路整流的工作原理和现象分析
图3-1三相桥式全控整流电路仿真模型图
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,
模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
参数设置:
(1)交流电压源参数U=100V,f=25Hz,三相电源相位依次延迟120°。(2)晶闸管参数Rn=0.001Ω,Lon=0.0001H,Vf=0V,Rs=50Ω,Cs=250e-6F。(3)负载参数R=10Ω,L=0H,C=inf。
(4)脉冲发生器的振幅为5V,周期为0.04s(即频率为25Hz),脉冲宽度为2。
当α=0°时,正相脉冲分别设为0.0033,0.0166,0.0299s;-C,-A,-B 相触发脉冲依次是0.01,0.0233,0.0366s.
图3-2α=0°整流输出电压等波形图
三.【实验总结】
目前在各种整流电路中,应用最为广泛的是三相桥式全控整流电路。整流一周脉动六次,每次脉动的波形都一样,故该电路为六脉波整流电输出电压u
d
路。带电阻负载时三相桥式全控整流电路角的移相范围是0~120°,带阻感负载时角的移相范围是0~90°
实验四直流斩波
一.【实验目的】
1.加深理解斩波器电路的工作原理;
2.掌握斩波器主电路、触发电路的调试步骤和方法;
3.熟悉斩波器电路各点的电压波形;
图4-1直流斩波仿真模型图
图4-2示波器1输出波形图
图4-3示波器2输出波形图
图4-4负载端电压输出波形图
图4-5负载端电压平均值波形图
图4-6斩波电路输出电压、电流波形图
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,
模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置,直流电压E=200V。
负载电压的平均值为
(4-1)
式中,为V处于通态的时间;为V处于断态的时间;T为开关周期;为导通占空比。
负载电流的平均值为
(4-2)
由于占空比为50%,所以斩波输出电压负值为50V。
三.【实验总结】
根据对输出电压平均值进行调制的方式不同,斩波电路可有如下三种控制方式:
1.保持开关周期T不变,调节开关导通时间,称为脉冲宽度调制(Pulse Width
Modulation,PWM);
2.保持开关导通时间不变,改变开关周期T,称为频率调制或调频型;
3.和T都可调,使占空比改变,称为混合型。
实验五单闭环转速反馈控制直流调速系统
一.【实验目的】
1.加深对比例积分控制的无静差直流调速系统的理解;
2.研究反馈控制环节对系统的影响和作用.
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块
连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置.
转速负反馈闭环调速系统:
直流电动机:额定电压,额定电流额定转速电动机电动势系数,假定晶闸管整流装置输出电流可逆,装置的放大系数,滞后时间常数,电枢回路总电阻,电枢回路电磁时间常数,电力拖动系统机电时间常数,转速反馈系数对应额定转速时的给定电压
比例积分控制的直流调速系统的仿真框图如图5-1所示。
图5-1比例积分控制的直流调速系统的仿真框图
图5-2开环比例控制直流调速系统仿真模型图
图5-3开环空载启动转速曲线图图5-4开环空载启动电流曲线图
图5-5闭环比例控制直流调速系统仿真模型图
在比例控制直流调速系统中,分别设置闭环系统开环放大系数k=0.56,2.5, 30,观察转速曲线图,随着K值的增加,稳态速降减小,但当K值大于临界值时,系统将发生震荡并失去稳定,所以K值的设定要小于临界值。当电机空载启动稳定运行后,加负载时转速下降到另一状态下运行,电流上升也随之上升。
图5-6k=0.56转速曲线图图5-7k=0.56电流曲线图
图5-8k=2.5转速曲线图图5-9k=30转速曲线图
图5-10闭环比例积分控制直流调速系统仿真模型图
图5-11PI控制转速n曲线图图5-12PI控制电流曲线图在闭环比例积分(PI)控制下,可以实现对系统无静差调节,即,提高了系统的稳定性。
三.【实验总结】
通过对本次实验的仿真,验证了比例部分能迅速响应控制作用,积分部分则最终消除稳态误差。比例积分控制综合了比例控制和积分控制两种规律的优点,又克服了各自的缺点,扬长避短,互相补充。若要求PI控制调速系统的稳定性好,又要求系统的快速性好,同时还要求稳态精度高和抗干扰性能好。但是这些指标是互相矛盾的,设计时往往需要用多种手段,反复试凑。在稳、准、快和抗干扰这四个矛盾的方面之间取得折中,才能获得比较满意的结果。
实验六双闭环控制直流调速系统
一.【实验目的】
1.加深了解转速、电流反馈控制直流调速系统的组成及其静特性;
2.研究调节器的工程设计方法在系统中的作用和地位。
三.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
图6-1电流环仿真模型图当KT=0.5时,电流环传递函数
图6-2KT=0.5时电流环仿真图
当KT=0.25,电流环传递函数
图6-3KT=0.25时电流环仿真图
KT=1.0,电流环传递函数
图6-4KT=1.0时电流环仿真图
当KT=0.25时,很快地得到了电流环的阶跃响应仿真结果如图6-3所示,无超调,但上升时间长;当KT=1.0,同样得到了电流环的阶跃响应的仿真结果如图6-4所示,超调打,但上升时间短。
图6-5转速环仿真模型图
图6-6转速环空载高速起动波形图图6-7转速环的抗扰波形图
三.【实验总结】
用工程设计方法来设计转速、电流反馈控制直流调速系统的原则是先内环后外环。电流环设计完成后,把电流环等效成转速环中的一个环节,再用同样的方法设计转速环。工程设计时,首先根据典型I型系统或II型系统的方法计算调节器参数,然后利用Matlab下的Simulink软件进行仿真,灵活修正调节器参数,直至得到满意的结果。
实验七异步电动机定子电流测定及调速方式一.【实验目的】
1.了解异步电动机动态数学模型的性质;
2.理解坐标变换的基本思路;
3.进一步掌握异步电动机调速方法;
4.学会M文件的编写与运行。
图7-1三相异步电动机仿真模型图
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行:仿真过程的启动,仿真参数的设置。
图7-2三相异步电动机电流仿真结果
图7-3异步电动机空载起动过程的转速仿真图
电力电子技术MATLAB仿真报告模板
《电气专业核心课综合课程设计》 题目:基于MATLAB的电力电子技术 仿真分析 学校: 院(系): 专业班级: 学生姓名: 学号: 指导教师: 目录
1.整流电路仿真………………………………………………………………………………页码 1.1单相半波可控整流系统………………………………………………………………页码 1.1.1晶闸管的仿真…………………………………………………………………页码 1.1.2单相半波可控整流电路的仿真………………………………………………页码 1.2晶闸管三相桥式整流系统的仿真…………………………………………………页码 1.3相位控制的晶闸管单相交流调压器带系统的仿真………………………………页码 2.斩波电路仿真………………………………………………………………………………页码 2.1降压斩波电路(Buck变换器)………………………………………………………页码 2.1.1可关断晶闸管(GTO)的仿真…………………………………………………页码 2.1.2 Buck变换器的仿真………………………………………………………页码 2.2升压斩波电路(Boost变换器)………………………………………………………页 码 2.2.1绝缘栅双极型晶体管(IGBT)的仿真…………………………………………页码 2.2.2 Boost变换器的仿真……………………………………………………………页码4.逆变电路仿真………………………………………………………………………………页码 4.1晶闸管三相半波有源逆变器的仿真………………………………………………页码 5.课程设计总结………………………………………………………………………………页码参考文献……………………………………………………………………………………页码 电气专业核心课综合课程设计任务书
电力电子技术实验报告
实验一 SCR、GTO、MOSFET、GTR、IGBT特性实验 一、实验目的 (1)掌握各种电力电子器件的工作特性。 (2)掌握各器件对触发信号的要求。 二、实验所需挂件及附件 序 型号备注 号 1DJK01 电源控制屏该控制屏包含“三相电源输出”等几个模块。2DJK06 给定及实验器件该挂件包含“二极管”等几个模块。 3DJK07 新器件特性实验 DJK09 单相调压与可调负 4 载 5万用表自备 将电力电子器件(包括SCR、GTO、MOSFET、GTR、IGBT五种)和负载电阻R 串联后接至直流电源的两端,由DJK06上的给定为新器件提供触发电压信号,给定电压从零开始调节,直至器件触发导通,从而可测得在上述过程中器件的V/A特性;图中的电阻R用DJK09 上的可调电阻负载,将两个90Ω的电阻接成串联形式,最大可通过电流为1.3A;直流电压和电流表可从DJK01电源控制屏上获得,五种电力电子器件均在DJK07挂箱上;直流电源从电源控制屏的输出接DJK09上的单相调压器,然后调压器输出接DJK09上整流及滤波电路,从而得到一个输出可以由调压器调节的直流电压源。 实验线路的具体接线如下图所示: 四、实验内容 (1)晶闸管(SCR)特性实验。
(3)功率场效应管(MOSFET)特性实验。
(5)绝缘双极性晶体管(IGBT)特性实验。 五、实验方法 (1)按图3-26接线,首先将晶闸管(SCR)接入主电路,在实验开始时,将DJK06上的给定电位器RP1沿逆时针旋到底,S1拨到“正给定”侧,S2拨到“给定”侧,单相调压器逆时针调到底,DJK09上的可调电阻调到阻值为最大的位置;打开DJK06的电源开关,按下控制屏上的“启动”按钮,然后缓慢调节调压器,同时监视电压表的读数,当直流电压升到40V时,停止调节单相调压器(在以后的其他实验中,均不用调节);调节给定电位器RP1,逐步增加给定电压,监视电压表、电流表的读数,当电压表指示接近零(表示管子完全导通),停止调节,记录给定电压U
Matlab通信系统仿真实验报告
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
电力电子技术仿真实验指导书
《电力电子技术实验》指导书 合肥师范学院电子信息工程学院
实验一电力电子器件 仿真过程: 进入MATLAB环境,点击工具栏中的Simulink选项。进入所需的仿真环境,如图所示。点击File/New/Model新建一个仿真平台。点击左边的器件分类,找到Simulink和SimPowerSystems,分别在他们的下拉选项中找到所需的器件,用鼠标左键点击所需的元件不放,然后直接拉到Model平台中。 图 实验一的具体过程: 第一步:打开仿真环境新建一个仿真平台,根据表中的路径找到我们所需的器件跟连接器。
提取出来的器件模型如图所示: 图 第二步,元件的复制跟粘贴。有时候相同的模块在仿真中需要多次用到,这时按照常规的方法可以进行复制跟粘贴,可以用一个虚线框复制整个仿真模型。还有一个常用方便的方法是在选中模块的同时按下Ctrl键拖拉鼠标,选中的模块上会出现一个小“+”好,继续按住鼠标和Ctrl键不动,移动鼠标就可以将模块拖拉到模型的其他地方复制出一个相同的模块,同时该模块名后会自动加“1”,因为在同一仿真模型中,不允许出现两个名字相同的模块。 第三步,把元件的位置调整好,准备进行连接线,具体做法是移动鼠标到一个器件的连接点上,会出现一个“十字”形的光标,按住鼠标左键不放,一直到你所要连接另一个器件的连接点上,放开左键,这样线就连好了,如果想要连接分支线,可以要在需要分支的地方按住Ctrl键,然后按住鼠标左键就可以拉出一根分支线了。 在连接示波器时会发现示波器只有一个接线端子,这时可以参照下面示波器的参数调整的方法进行增加端子。在调整元件位置的时候,有时你会遇到有些元件需要改变方向才更方便于连接线,这时可以选中要改变方向的模块,使用Format菜单下的Flip block 和Rotate
#电力电子技术实验报告答案
实验一锯齿波同步移相触发电路实验 一、实验目的 (1)加深理解锯齿波同步移相触发电路的工作原理及各元件的作用。 (2)掌握锯齿波同步移相触发电路的调试方法。 三、实验线路及原理 锯齿波同步移相触发电路的原理图如图1-11所示。锯齿波同步移相触发电路由同步检测、锯齿波形成、移相控制、脉冲形成、脉冲放大等环节组成,其工作原理可参见1-3节和电力电子技术教材中的相关内容。 四、实验内容 (1)锯齿波同步移相触发电路的调试。 (2)锯齿波同步移相触发电路各点波形的观察和分析。 五、预习要求 (1)阅读本教材1-3节及电力电子技术教材中有关锯齿波同步移相 触发电路的内容,弄清锯齿波同步移相触发电路的工作原理。 (2)掌握锯齿波同步移相触发电路脉冲初始相位的调整方法。 六、思考题 (1)锯齿波同步移相触发电路有哪些特点? (2)锯齿波同步移相触发电路的移相范围与哪些参数有关? (3)为什么锯齿波同步移相触发电路的脉冲移相范围比正弦波同步移相触发电路的移相范围要大? 七、实验方法 (1)将DJK01电源控制屏的电源选择开关打到“直流调速”侧,使输出线电压为200V(不能打到“交流调速”侧工作,因为DJK03-1的正常工作电源电压为220V 10%,而“交流调速”侧输出的线电压为240V。如果输入电压超出其标准工作范围,挂件的使用寿命将减少,甚至会导致挂件的损坏。在“DZSZ-1型电机及自动控制实验装置”上使用时,通过操作控制屏左侧的自藕调压器,将输出的线电压调到220V左右,然后才能将电源接入挂件),用两根导线将200V交流电压接到DJK03-1的“外接220V”端,按下“启动”按钮,打开DJK03-1电源开关,这时挂件中所有的触发电路都开始工作,用双踪示波器观察锯齿波同步触发电路各观察孔的电压波形。 ①同时观察同步电压和“1”点的电压波形,了解“1”点波形形成的原因。 ②观察“1”、“2”点的电压波形,了解锯齿波宽度和“1”点电压波形的关系。 ③调节电位器RP1,观测“2”点锯齿波斜率的变化。 ④观察“3”~“6”点电压波形和输出电压的波形,记下各波形的幅值与宽度,并比较“3”点电压U3和“6”点电压U6的对应关系。 (2)调节触发脉冲的移相范围
MATLAB仿真实验报告
MATLAB 仿真实验报告 课题名称:MATLAB 仿真——图像处理 学院:机电与信息工程学院 专业:电子信息科学与技术 年级班级:2012级电子二班 一、实验目的 1、掌握MATLAB处理图像的相关操作,熟悉相关的函数以及基本的MATLAB语句。 2、掌握对多维图像处理的相关技能,理解多维图像的相关性质 3、熟悉Help 命令的使用,掌握对相关函数的查找,了解Demos下的MATLAB自带的原函数文件。 4、熟练掌握部分绘图函数的应用,能够处理多维图像。 二、实验条件
MATLAB调试环境以及相关图像处理的基本MATLAB语句,会使用Help命令进行相关函数查找 三、实验内容 1、nddemo.m函数文件的相关介绍 Manipulating Multidimensional Arrays MATLAB supports arrays with more than two dimensions. Multidimensional arrays can be numeric, character, cell, or structure arrays. Multidimensional arrays can be used to represent multivariate data. MATLAB provides a number of functions that directly support multidimensional arrays. Contents : ●Creating multi-dimensional arrays 创建多维数组 ●Finding the dimensions寻找尺寸 ●Accessing elements 访问元素 ●Manipulating multi-dimensional arrays操纵多维数组 ●Selecting 2D matrices from multi-dimensional arrays从多维数组中选择二维矩 阵 (1)、Creating multi-dimensional arrays Multidimensional arrays in MATLAB are created the same way as two-dimensional arrays. For example, first define the 3 by 3 matrix, and then add a third dimension. The CAT function is a useful tool for building multidimensional arrays. B = cat(DIM,A1,A2,...) builds a multidimensional array by concatenating(联系起来)A1, A2 ... along the dimension DIM. Calls to CAT can be nested(嵌套). (2)、Finding the dimensions SIZE and NDIMS return the size and number of dimensions of matrices. (3)、Accessing elements To access a single element of a multidimensional array, use integer subscripts(整数下标). (4)、Manipulating multi-dimensional arrays
电力电子技术MatLab仿真
本文前言 MA TLAB的简介 MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。随着版本的升级,内容不断扩充,功能更加强大。近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。 MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。MATLAB语言的难点是函数较多,仅基本部分就有七百多个,其中常用的有二三百个。 MATLAB在国内外的大学中,特别是数值计算应用最广的电气信息类学科中,已成为每个学生都应该掌握的工具。MATLAB大大提高了课程教学、解题作业、分析研究的效率。
电力电子技术实验报告
实验一 DC-DC 变换电路的性能研究 一、实验目的 熟悉Matlab 的仿真实验环境,熟悉Buck 电路、Boost 电路、Cuk 电路及单端反激变换(Flyback )电路的工作原理,掌握这几种种基本DC-DC 变换电路的工作状态及波形情况,初步了解闭环控制技术在电力电子变换电路中的应用。 二、实验内容 1.Buck 变换电路的建模,波形观察及相关电压测试 2.Boost 变换电路的建模,波形观察及相关电压测试; 3.Cuk 电路的建模,波形观察及电压测试; 4.单端反激变换(Flyback )电路的建模,波形观察及电压测试,简单闭环控制原理研究。 (一)Buck 变换电路实验 (1)电感电容的计算过程: V V 500=,电流连续时,D=0.4; 临界负载电流为I= 20 50 =2.5A ; 保证电感电流连续:)1(20D I f V L s -?= =5 .210002024.0-150????) (=0.375mH 纹波电压 0.2%= s s f LCf D V ?8-10) (,在由电感值0.375mH ,算出C=31.25uF 。 (2)仿真模型如下: 在20KHz 工作频率下的波形如下:
示波器显示的六个波形依次为:MOSFET的门极电压、流过电阻两端的电流、电感电流、输出电压、MOSFET电流及续流二极管电流的波形。 在50KHz工作频率下的波形如下: 示波器显示的六个波形一次为:MOSFET的门极电压、流过电阻两端的电流、电感电流、输出电压、MOSFET电流及续流二极管电流的波形; 建立仿真模型如下:
(3)输出电压的平均值显示在仿真图上,分别为49.85,49.33; (4)提高开关频率,临界负载电流变小,电感电流更容易连续,输出电压的脉动减小,使得输出波形应更稳定。 (二)Boost 变换电路实验 (1)电感电容的计算过程: 升压比M= S V V 0=D -11,0V =15V,S V =6V,解得D=60%; 纹波电压0.2%=s c f f D ? ,c f RC 1=,s f =40KHz,求得L=12uH,C=750uf 。 建立仿真模型如下:
MATLAB通信系统仿真实验报告1
MATLAB通信系统仿真实验报告
实验一、MATLAB的基本使用与数学运算 目的:学习MATLAB的基本操作,实现简单的数学运算程序。 内容: 1-1要求在闭区间[0,2π]上产生具有10个等间距采样点的一维数组。试用两种不同的指令实现。 运行代码:x=[0:2*pi/9:2*pi] 运行结果: 1-2用M文件建立大矩阵x x=[0.10.20.30.40.50.60.70.80.9 1.11.21.31.41.51.61.71.81.9 2.12.22.32.42.52.62.72.82.9 3.13.23.33.43.53.63.73.83.9] 代码:x=[0.10.20.30.40.50.60.70.80.9 1.11.21.31.41.51.61.71.81.9 2.12.22.32.42.52.62.72.82.9 3.13.23.33.43.53.63.73.83.9] m_mat 运行结果: 1-3已知A=[5,6;7,8],B=[9,10;11,12],试用MATLAB分别计算 A+B,A*B,A.*B,A^3,A.^3,A/B,A\B. 代码:A=[56;78]B=[910;1112]x1=A+B X2=A-B X3=A*B X4=A.*B X5=A^3 X6=A.^3X7=A/B X8=A\B
运行结果: 1-4任意建立矩阵A,然后找出在[10,20]区间的元素位置。 程序代码及运行结果: 代码:A=[1252221417;111024030;552315865]c=A>=10&A<=20运行结果: 1-5总结:实验过程中,因为对软件太过生疏遇到了些许困难,不过最后通过查书与同学交流都解决了。例如第二题中,将文件保存在了D盘,而导致频频出错,最后发现必须保存在MATLAB文件之下才可以。第四题中,逻辑语言运用到了ij,也出现问题,虽然自己纠正了问题,却也不明白错在哪了,在老师的讲解下知道位置定位上不能用ij而应该用具体的整数。总之第一节实验收获颇多。
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
电力电子技术与电力系统分析matlab仿真
电气2013级卓班电力电子技术与电力系统分析 课程实训报告 专业:电气工程及其自动化 班级: 姓名: 学号: 指导教师:
兰州交通大学自动化与电气工程学院 2016 年 1 月日
电力电子技术与电力系统分析课程实训报告 1 电力电子技术实训报告 1.1 实训题目 1.1.1电力电子技术实训题目一 一.单相半波整流 参考电力电子技术指导书中实验三负载,建立MATLAB/Simulink环境下三相半波整流电路和三相半波有源逆变电路的仿真模型。仿真参数设置如下: (1)交流电压源的参数设置和以前实验相关的参数一样。 (2)晶闸管的参数设置如下: R=0.001Ω,L =0H,V f=0.8V,R s=500Ω,C s=250e-9F on (3)负载的参数设置 RLC串联环节中的R对应R d,L对应L d,其负载根据类型不同做不同的调整。 (4)完成以下任务: ①仿真绘出电阻性负载(RLC串联负载环节中的R d= Ω,电感L d=0,C=inf,反电动势为0)下α=30°,60°,90°,120°,150°时整流电压U d,负载电流L 和晶闸管两端电压U vt1的波形。 d ②仿真绘出阻感性负载下(负载R d=Ω,电感L d为,反电动势E=0)α=30°,60°,90°,120°,150°时整流电压U d,负载电流L d和晶闸管两端电压U vt1的波形。 ③仿真绘出阻感性反电动势负载下α=90°,120°,150°时整流电压U d,负载电流L d和晶闸管两端电压U vt1的波形,注意反电动势E的极性。 (5)结合仿真结果回答以下问题: ①该三项半波可控整流电路在β=60°,90°时输出的电压有何差异?
MATLAB Simulink系统建模与仿真 实验报告
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
电力电子技术matl新编仿真实验报告
电力电子技术m a t l新编仿真实验报告 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
上海电机学院卢昌钰 BG0801 10号 1.单相半波可控整流电路 (1)电阻性负载(R=1欧姆,U2=220V,α=30°) 接线图 电阻性负载二次电压,输出电压,二次电流,输出电流,晶闸管电压曲线 输入电压与输出电压波形 (2)阻感负载(R=1欧姆,L=,U2=220V,α=30°) 接线图 阻感负载二次电压,输出电压,二次电流,输出电流,晶闸管电压曲线 输入电压与输出电压波形 (3)阻感负载+续流二极管(R=1欧姆,L=,U2=220V,α=30°)有问题 接线图 阻感负载二次电压,输出电压,二次电流,输出电流,晶闸管电压曲线 输入与输出电压波形 2.单相桥式全控整流电路
(1)电阻性负载(R=1欧姆,U2=220V,α=60°) 电阻性负载电路图搭建 电阻负载输入电压和输出电压对比 电阻负载直流电压和电流波形 电阻负载时晶闸管T1的波形 电流i2的曲线 (2)电感性负载(R=1欧姆,L=,α=60°,U2=220V,) 阻感负载电路图搭建 阻感负载电压输入与输出波形 阻感负载输出电流id 阻感负载输出电压ud 阻感负载交变时的电流i2
阻感负载交变时的电压u2 阻感负载VT1的电压波形 (3)电感性负载+续流二极管(R=1欧姆,L=,α=60°,U2=220V,) 电感性负载+续流二极管接线图 输入和输出电压波形 负载电流 负载电压 二次侧电流 晶闸管两端电压 3.单相桥式半空整流电路 (1)电阻负载(R=1欧姆,α=60°,U2=220V,) 接线图 二次侧电压,负载电压,二次侧电流,负载电流,晶闸管电压,二极管电压,二 极管电流波形图 (2)阻感负载(R=1欧姆,L=,α=60°,U2=220V,) 接线图 二次侧电压,负载电压,二次侧电流,负载电流,晶闸管电压,二极管电压,二 极管电流波形图 (3)阻感负载+续流二极管(R=1欧姆,L=,α=60°,U2=220V,) 接线图 二次侧电压,负载电压,二次侧电流,负载电流,晶闸管VT1电压,二极管VD4 电压,二极管VD4电流波形图
《电力电子技术》实验报告-1
河南安阳职业技术学院机电工程系电子实验实训室(2011.9编制) 目录 实验报告一晶闸管的控制特性及作为开关的应用 (1) 实验报告二单结晶体管触发电路 (3) 实验报告三晶闸管单相半控桥式整流电路的调试与分析(电阻负载) (6) 实验报告四晶闸管单相半控桥式整流电路的研究(感性、反电势负载) (8) 实验报告五直流-直流集成电压变换电路的应用与调试 (10)
实验报告一晶闸管的控制特性及作为开关的应用 一、实训目的 1.掌握晶闸管半控型的控制特点。 2.学会晶闸管作为固体开关在路灯自动控制中的应用。 二、晶闸管工作原理和实训电路 1.晶闸管工作原理 晶闸管的控制特性是:在晶闸管的阳极和阴极之间加上一个正向电压(阳极为高电位);在门极与阴极之间再加上一定的电压(称为触发电压),通以一定的电流(称为门极触发电流,这通常由触发电路发给一个触发脉冲来实现),则阳极与阴极间在电压的作用下便会导通。当晶闸管导通后,即使触发脉冲消失,晶闸管仍将继续导通而不会自行关断,只能靠加在阳极和阴极间的电压接近于零,通过的电流小到一定的数值(称为维持电流)以下,晶闸管才会关断,因此晶闸管是一种半控型电力电子元件。 2.晶闸管控制特性测试的实训电路 图1.1晶闸管控制特性测试电路 3.晶闸管作为固体开关在路灯自动控制电路中的应用电路 图1.2路灯自动控制电路 三、实训设备(略,看实验指导书)
四、实训内容与实训步骤(略,看实验指导书) 五、实训报告要求 1.根据对图1.1所示电路测试的结果,写出晶闸管的控制特点。记录BT151晶闸管导通所需的触发电压U G、触发电流I G及导通时的管压降U AK。 2.简述路灯自动控制电路的工作原理。
通信工程系统仿真实验报告
通信原理课程设计 实验报告 专业:通信工程 届别:07 B班 学号:0715232022 姓名:吴林桂 指导老师:陈东华
数字通信系统设计 一、 实验要求: 信源书记先经过平方根升余弦基带成型滤波,成型滤波器参数自选,再经BPSK ,QPSK 或QAM 调制(调制方式任选),发射信号经AWGN 信道后解调匹配滤波后接收,信道编码可选(不做硬性要求),要求给出基带成型前后的时域波形和眼图,画出接收端匹配滤波后时域型号的波形,并在时间轴标出最佳采样点时刻。对传输系统进行误码率分析。 二、系统框图 三、实验原理: QAM 调制原理:在通信传渝领域中,为了使有限的带宽有更高的信息传输速率,负载更多的用户必须采用先进的调制技术,提高频谱利用率。QAM 就是一种频率利用率很高的调制技术。 t B t A t Y m m 00sin cos )(ωω+= 0≤t ≤Tb 式中 Tb 为码元宽度t 0cos ω为 同相信号或者I 信号; t 0s i n ω 为正交信号或者Q 信号; m m B A ,为分别为载波t 0cos ω,t 0sin ω的离散振幅; m 为 m A 和m B 的电平数,取值1 , 2 , . . . , M 。 m A = Dm*A ;m B = Em*A ; 式中A 是固定的振幅,与信号的平均功率有关,(dm ,em )表示调制信号矢量点在信号空
间上的坐标,有输入数据决定。 m A 和m B 确定QAM 信号在信号空间的坐标点。称这种抑制载波的双边带调制方式为 正交幅度调制。 图3.3.2 正交调幅法原理图 Pav=(A*A/M )*∑(dm*dm+em*em) m=(1,M) QAM 信号的解调可以采用相干解调,其原理图如图3.3.5所示。 图3.3.5 QAM 相干解调原理图 四、设计方案: (1)、生成一个随机二进制信号 (2)、二进制信号经过卷积编码后再产生格雷码映射的星座图 (3)、二进制转换成十进制后的信号 (4)、对该信号进行16-QAM 调制 (5)、通过升余弦脉冲成形滤波器滤波,同时产生传输信号 (6)、增加加性高斯白噪声,通过匹配滤波器对接受的信号滤波 (7)、对该信号进行16-QAM 解调 五、实验内容跟实验结果:
控制理论实验报告MATLAB仿真实验解析
实验报告 课程名称:控制理论(乙) 指导老师:林峰 成绩:__________________ 实验名称:MATLAB 仿真实验 实验类型:________________同组学生姓名:__________ 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得 实验九 控制系统的时域分析 一、 实验目的: 1.用计算机辅助分析的办法,掌握系统的时域分析方法。 2.熟悉Simulink 仿真环境。 二、实验原理及方法: 系统仿真实质上就是对系统模型的求解,对控制系统来说,一般模型可转化成某个微分方程或差分方程表示,因此在仿真过程中,一般以某种数值算法从初态出发,逐步计算系统的响应,最后绘制出系统的响应曲线,进而可分析系统的性能。控制系统最常用的时域分析方法是,当输入信号为单位阶跃和单位冲激函数时,求出系统的输出响应,分别称为单位阶跃响应和单位冲激响应。在MATLAB 中,提供了求取连续系统的单位阶跃响应函数step ,单位冲激响应函数impulse ,零输入响应函数initial 等等。 二、实验内容: 二阶系统,其状态方程模型为 ? 1x -0.5572 -0.7814 1x 1 = + u ? 2x 0.7814 0 2x 0 1x y = [1.9691 6.4493] +[0] u 2x 四、实验要求: 1.编制MATLAB 程序,画出单位阶跃响应曲线、冲击响应曲线、系统的零输入响应、斜坡输入响应; (1)画出系统的单位阶跃响应曲线; A=[-0.5572 -0.7814;0.7814 0 ]; B=[1;0];
OFDM系统仿真实验报告
无线通信——OFDM系统仿真
一、实验目的 1、了解OFDM 技术的实现原理 2、利用MATLAB 软件对OFDM 的传输性能进行仿真并对结论进行分析。 二、实验原理与方法 1 OFDM 调制基本原理 正交频分复用(OFDM)是多载波调制(MCM)技术的一种。MCM 的基本思想是把数据流串并变换为N 路速率较低的子数据流,用它们分别去调制N 路子载波后再并行传输。因子数据流的速率是原来的1/N ,即符号周期扩大为原来的N 倍,远大于信道的最大延迟扩展,这样MCM 就把一个宽带频率选择性信道划分成N 个窄带平坦衰落信道,从而“先天”具有很强的抗多径衰落和抗脉冲干扰的能力,特别适合于高速无线数据传输。OFDM 是一种子载波相互混叠的MCM ,因此它除了具有上述毗M 的优势外,还具有更高的频谱利用率。OFDM 选择时域相互正交的子载波,创门虽然在频域相互混叠,却仍能在接收端被分离出来。 2 OFDM 系统的实现模型 利用离散反傅里叶变换( IDFT) 或快速反傅里叶变换( IFFT) 实现的OFDM 系统如图1 所示。输入已经过调制(符号匹配) 的复信号经过串P 并变换后,进行IDFT 或IFFT 和并/串变换,然后插入保护间隔,再经过数/模变换后形成OFDM 调制后的信号s (t ) 。该信号经过信道后,接收到的信号r ( t ) 经过模P 数变换,去掉保护间隔以恢复子载波之间的正交性,再经过串/并变换和DFT 或FFT 后,恢复出OFDM 的调制信号,再经过并P 串变换后还原出输入的符号。 图1 OFDM 系统的实现框图 从OFDM 系统的基本结构可看出, 一对离散傅里叶变换是它的核心,它使各子载波相互正交。设OFDM 信号发射周期为[0,T],在这个周期内并行传输的N 个符号为001010(,...,)N C C C -,,其中ni C 为一般复数, 并对应调制星座图中的某一矢量。比如00(0)(0),(0)(0)C a j b a b =+?和分别为所要传输的并行信号, 若将
MATLAB仿真实验报告
MATLA仿真实验报告 学院:计算机与信息学院 课程:—随机信号分析 姓名: 学号: 班级: 指导老师: 实验一
题目:编写一个产生均值为1,方差为4的高斯随机分布函数程序, 求最大值,最小值,均值和方差,并于理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示 G仁random( 'Normal' ,0,4,1,1024); y=max(G1) x=mi n(G1) m=mea n(G1) d=var(G1) plot(G1);
实验二 题目:编写一个产生协方差函数为CC)=4e":的平稳高斯过程的程序,产生样本函数。估计所产生样本的时间自相关函数和功率谱密度,并求统计自相关函数和功率谱密度,最后将结果与理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示。 N=10000; Ts=0.001; sigma=2; beta=2; a=exp(-beta*Ts); b=sigma*sqrt(1-a*a); w=normrnd(0,1,[1,N]); x=zeros(1,N); x(1)=sigma*w(1); for i=2:N x(i)=a*x(i-1)+b*w(i); end %polt(x); Rxx=xcorr(x0)/N; m=[-N+1:N-1]; Rxx0=(sigma A2)*exp(-beta*abs(m*Ts)); y=filter(b,a,x) plot(m*Ts,RxxO, 'b.' ,m*Ts,Rxx, 'r');
periodogram(y,[],N,1/Ts); 文件旧硯化)插入(1〕 ZMCD 克闻〔D ]窗口曲) Frequency (Hz) 50 100 150 200 250 300 350 400 450 500 NH---.HP)&UO 二 balj/ 」- □歹
三相桥式全控整流电路实验报告
三相桥式全控整流电路实 验报告 Prepared on 24 November 2020
实验三三相桥式全控整流电路实验 一.实验目的 1.熟悉MCL-18, MCL-33组件。 2.熟悉三相桥式全控整流电路的接线及工作原理。 二.实验内容 1.MCL-18的调试 2.三相桥式全控整流电路 3.观察整流状态下,模拟电路故障现象时的波形。 三.实验线路及原理 实验线路如图3-12所示。主电路由三相全控整流电路组成。触发电路为数字集成电路,可输出经高频调制后的双窄脉冲链。三相桥式整流电路的工作原理可参见“电力电子技术”的有关教材。 四.实验设备及仪器 1.MCL—Ⅱ型电机控制教学实验台主控制屏。 2.MCL-18组件 3.MCL-33组件 4.MEL-03可调电阻器(900) 6.二踪示波器 7.万用表 五.实验方法 1.按图3-12接线,未上主电源之前,检查晶闸管的脉冲是否正常。 (1)打开MCL-18电源开关,给定电压有电压显示。
(2)用示波器观察MCL-33的双脉冲观察孔,应有间隔均匀,相互间隔60o 的幅度相同的双脉冲。 (3)用示波器观察每只晶闸管的控制极、阴极,应有幅度为1V —2V 的脉冲。注:将面板上的Ublf 接地(当三相桥式全控整流电路使用I 组桥晶闸管VT1~VT6时),将I 组桥式触发脉冲的六个琴键开关均拨到“接通”, 琴键开关不按下为导通。 (4)将给定输出Ug 接至MCL-33面板的Uct 端,在Uct=0时,调节偏移电压Ub ,使=90o 。(注:把示波器探头接到三相桥式整流输出端即U d 波形, 探头地线接到晶闸管阳极。) 2.三相桥式全控整流电路 (1) 电阻性负载 按图接线,将Rd 调至最大450 (900并联)。 三相调压器逆时针调到底,合上主电源,调节主控制屏输出电压U uv 、U vw 、U wu ,从0V 调至70V(指相电压)。调节Uct ,使 在30o ~90o 范围内变化,用示波器观察记录=30O 、60O 、90O 时,整流电压u d =f (t ),晶闸管两端电压u VT =f (t )的波形,并记录相应的Ud 和交流输入电压U 2 数值。 30° 60° 90° 3.电感性负载 按图线路,将电感线圈(700mH)串入负载,Rd 调至最大(450)。 调节Uct ,使 在30o ~90o 范围内变化,用示波器观察记录=30 O 、60O 、90O 时,整流电压u d =f (t ),晶闸管两端电压u VT =f (t )的波形,并记录相应的Ud 和交流输入电压U 2 数值。 30° 60° 90°
通信系统仿真实验报告(DOC)
通信系统实验报告——基于SystemView的仿真实验 班级: 学号: 姓名: 时间:
目录 实验一、模拟调制系统设计分析 -------------------------3 一、实验内容-------------------------------------------3 二、实验要求-------------------------------------------3 三、实验原理-------------------------------------------3 四、实验步骤与结果-------------------------------------4 五、实验心得------------------------------------------10 实验二、模拟信号的数字传输系统设计分析------------11 一、实验内容------------------------------------------11 二、实验要求------------------------------------------11 三、实验原理------------------------------------------11 四、实验步骤与结果------------------------------------12 五、实验心得------------------------------------------16 实验三、数字载波通信系统设计分析------------------17 一、实验内容------------------------------------------17 二、实验要求------------------------------------------17 三、实验原理------------------------------------------17 四、实验步骤与结果------------------------------------18 五、实验心得------------------------------------------27
杭电电力电子技术实验报告
电力电子技术实验报告班级: 学号: 姓名: 指导老师:余善恩、孙伟华 实验名称:锯齿波同步移相触发电路及单相半波可控整流 三相桥式全控整流及有源逆变电路实验
实验一锯齿波同步移相触发电路及单相半波可控整流一、实验目的 1.加深理解锯齿波同步移相触发电路的工作原理及各元件的作用。 2.掌握锯齿波同步触发电路的调试方法。 3.对单相半波可控整流电路在电阻负载及电阻电感负载时工作情况作全面分析。 4.了解续流二极管的作用。 二、实验内容 1.锯齿波同步触发电路的调试。 2.锯齿波同步触发电路各点波形观察,分析。 3.单相半波整流电路带电阻性负载时特性的测定。 4.单相半波整流电路带电阻—电感性负载时,续流二极管作用的观察。 三、实验线路及原理 锯齿波同步移相触发电路主要由同步检测、锯齿波形成、移相控制、脉冲形成、脉冲放大等环节组成,其原理图如图1-1所示。 主电路 (a) (b)锯齿波同步移相触发电路 图1-1 单相半波可控整流电路 由V3、VD1、VD2、C1等元件组成同步检测环节,其作用是利用同步电压U T来控制锯齿波产生的时刻及锯齿波的宽度。由V1、V2等元件组成的恒流源电路,当V3截止时,恒流源对C2充电形成锯齿波;当V3导通时,电容C2通过R3、V3放电;调节电位器RP1可以调节恒流源的电流大小,改变对电容的充电时间,从而改变了锯齿波的斜率;控制电压U ct、偏移电压U b和锯齿波电压在V5基极综合叠加,从而构成移相控制环节,RP2、RP3分别调节控制电压U ct和偏移电压U b的大小;V6、V7构成脉冲形成放大环节,C5为强触发电容用于改善脉冲的前沿,由脉冲变压器输出触发脉冲。