无迹卡尔曼滤波在目标跟踪中的应用
卡尔曼滤波在跟踪中的应用

卡尔曼滤波在跟踪中的应用卡尔曼滤波在跟踪中的应用1. 引言在当今信息爆炸的时代,跟踪技术已经成为人们日常生活中不可或缺的一部分。
从物流追踪到电子支付,从目标检测到自动驾驶,跟踪技术在各种领域中发挥着重要的作用。
其中,卡尔曼滤波作为一种经典的统计优化方法,在跟踪问题中具有卓越的应用效果和广泛的适用性。
2. 卡尔曼滤波的原理和特点卡尔曼滤波是一种基于状态空间模型的递推滤波算法,它通过对系统的状态和观测进行联合估计,实现对系统状态的精确跟踪。
其基本原理是利用系统状态的先验估计和观测量进行状态修正,从而实现对系统状态的优化估计。
卡尔曼滤波具有以下几个特点:2.1 数学模型简洁:卡尔曼滤波基于线性系统和高斯分布假设,使得系统的描述更加简洁,计算效率更高。
2.2 递推更新:卡尔曼滤波通过递推的方式,根据当前的状态估计和观测量,得到下一时刻的状态估计,实现对系统状态的连续跟踪。
2.3 优化迭代:卡尔曼滤波通过最小化均方误差来优化状态估计,在迭代过程中不断调整估计的准确性,使得跟踪效果更加精确。
3. 卡尔曼滤波在目标跟踪中的应用3.1 运动物体跟踪:卡尔曼滤波在运动物体跟踪中具有广泛的应用。
通过结合系统的动态模型和观测模型,卡尔曼滤波可以预测运动物体的位置、速度等状态,并不断修正估计结果,从而实现对运动物体的准确跟踪。
3.2 目标检测与识别:卡尔曼滤波在目标检测与识别中属于一种重要补充手段。
通过将卡尔曼滤波与其他目标检测算法相结合,可以提高目标检测的精度和鲁棒性,有效应对目标尺度变化、遮挡等问题。
3.3 自动驾驶:卡尔曼滤波在自动驾驶系统中扮演着关键的角色。
通过对车辆状态实时跟踪和预测,卡尔曼滤波可以实现对车辆行驶路径、速度等参数的估计,从而辅助驾驶决策和行驶控制。
4. 个人观点和理解作为一种经典的统计优化方法,卡尔曼滤波在跟踪问题中的应用具有独特的优势。
相比于其他跟踪算法,卡尔曼滤波具有数学模型简洁、计算效率高、递推更新和优化迭代等特点,能够在动态环境中实现对目标位置、速度等状态的精确跟踪。
卡尔曼滤波实现目标跟踪
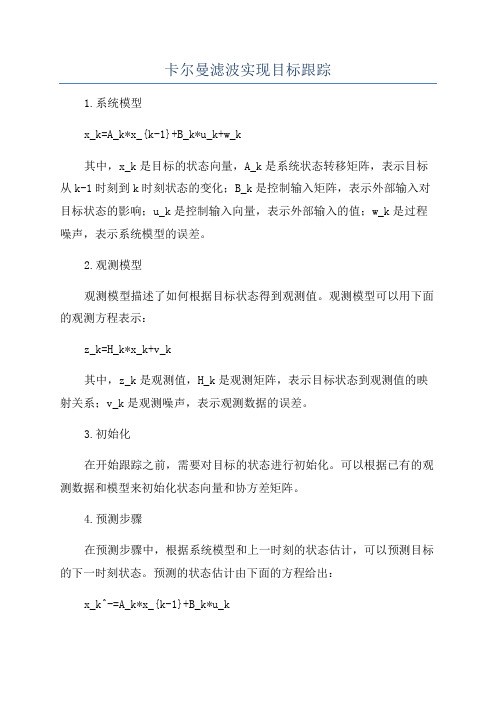
卡尔曼滤波实现目标跟踪1.系统模型x_k=A_k*x_{k-1}+B_k*u_k+w_k其中,x_k是目标的状态向量,A_k是系统状态转移矩阵,表示目标从k-1时刻到k时刻状态的变化;B_k是控制输入矩阵,表示外部输入对目标状态的影响;u_k是控制输入向量,表示外部输入的值;w_k是过程噪声,表示系统模型的误差。
2.观测模型观测模型描述了如何根据目标状态得到观测值。
观测模型可以用下面的观测方程表示:z_k=H_k*x_k+v_k其中,z_k是观测值,H_k是观测矩阵,表示目标状态到观测值的映射关系;v_k是观测噪声,表示观测数据的误差。
3.初始化在开始跟踪之前,需要对目标的状态进行初始化。
可以根据已有的观测数据和模型来初始化状态向量和协方差矩阵。
4.预测步骤在预测步骤中,根据系统模型和上一时刻的状态估计,可以预测目标的下一时刻状态。
预测的状态估计由下面的方程给出:x_k^-=A_k*x_{k-1}+B_k*u_k其中,x_k^-是预测的状态估计值。
同时,还需要预测状态估计值的协方差矩阵,可以使用下面的方程计算:P_k^-=A_k*P_{k-1}*A_k^T+Q_k其中,P_k^-是预测的协方差矩阵,Q_k是过程噪声的协方差矩阵。
5.更新步骤在更新步骤中,根据观测数据来修正预测的状态估计。
首先,计算创新(innovation)或者观测残差:y_k=z_k-H_k*x_k^-其中,y_k是观测残差。
然后,计算创新的协方差矩阵:S_k=H_k*P_k^-*H_k^T+R_k其中,S_k是创新的协方差矩阵,R_k是观测噪声的协方差矩阵。
接下来,计算卡尔曼增益:K_k=P_k^-*H_k^T*S_k^-1最后,更新估计的目标状态和协方差矩阵:x_k=x_k^-+K_k*y_kP_k=(I-K_k*H_k)*P_k^-其中,I是单位矩阵。
6.重复预测和更新步骤重复进行预测和更新步骤,可以得到目标的状态估计序列和协方差矩阵序列。
无迹卡尔曼滤波作用
无迹卡尔曼滤波作用
无迹卡尔曼滤波是一种常用的状态估计算法,它通过将高斯分布的卡尔曼滤波方法扩展到非线性系统上,能够有效处理非线性和非高斯噪声的情况。
在实际应用中,无迹卡尔曼滤波广泛应用于机器人导航、目标跟踪、图像处理等领域。
与传统的卡尔曼滤波相比,无迹卡尔曼滤波具有更高的精度和鲁棒性。
它采用了一种无迹变换技术,通过选取一组特定的采样点,建立一个与原始状态分布相似的高斯混合分布来近似非线性函数。
这种采样点的选择方式保证了无偏性和方差最小化,并且能够有效地处理不可观测的状态。
无迹卡尔曼滤波的优点还在于它能够自适应地调整卡尔曼增益和状态估计的方差,以便更好地适应不同的环境和任务。
此外,它还可以通过引入扩展状态变量来应对非线性度更高的系统,例如具有周期性特征的系统。
总之,无迹卡尔曼滤波作为一种高效可靠的状态估计算法,在各种实际应用中都有着广泛的应用前景。
- 1 -。
无迹卡尔曼滤波在目标跟踪中的应用

本科毕业设计论文题目无迹卡尔曼滤波在目标跟踪中的应用专业名称学生姓名指导教师毕业时间毕业任务书一、题目无迹卡尔曼滤波在目标跟踪中的应用二、指导思想和目的要求利用已有的专业知识,培养学生解决实际工程问题的能力;锻炼学生的科研工作能力和培养学生的团结合作攻关能力;三、主要技术指标1、熟悉掌握无迹卡尔曼滤波的基本原理;2、对机动目标进行跟踪;四、进度和要求第01周----第02周:英文翻译;第03周----第04周:了解无迹卡尔曼滤波的发展趋势;第05周----第06周:学习无迹卡尔曼滤波基本原理;第07周----第09周:掌握Matlab编程,熟悉开发环境;第10周----第11周:学习常用目标的机动模型;第12周----第13周:编写程序,调试验证;第14周----第16周:撰写毕业设计论文,论文答辩;五、参考文献和书目1. 张勇刚,李宁,奔粤阳,等. 最优状态估计-卡尔曼及非线性滤波[M],国防工业出版社,2013。
2. 冯志全,孟祥旭,蔺永政,等.UKF滤波器的强跟踪性研究[J].小型微型计算机系统, 2006, 27(11): 2142-2145。
3. 潘泉,杨峰,叶亮,等.一类非线性滤波器-UKF综述[J].控制与决策, 2005, 20(5): 481-489。
4.宋迎春. 动态定位中的卡尔曼滤波研究[D]. 博士学位论文;长沙:中南大学, 2006。
5.贺觅知.基于卡尔曼滤波原理的电力系统动态状态估计算法研究[D].西安:西安交通大学,2006。
6.孙清,张陵,张爱社,伍晓红,等.基于扩展卡尔曼滤波(EKF)的结构动态物理参数识别[A];第十届全国结构工程学术会议论文集第Ⅲ卷[C];2001年。
7.黄铫.一种扩维无迹卡尔曼滤波.电子测量与仪器学报[J].2009,2009增刊:56-60。
8.柴霖,袁建平,罗建军,等。
非线性估计理论的最新进展[J].宇航学报,2005,26(3):380-384。
无迹Kalman滤波器及其目标跟踪应用

最后 计 算 U F增益 ,更新 状 态 向量和 方差 。仿真 表 明该 方法 比 E F方 法可 用 性 更 强 K K 关键 词 :卡 尔曼滤 波 ;无迹 变换 ; 无迹卡 尔 曼滤波 中图分 类号 :T 3 1 ;T 1 . P0. 6 N7 3 1 文 献标 识码 :A
Uns e t d Ka m a le nd IsAplc to o Ta g tTr c ng c n e l n Fit ra t i a i n t r e a ki
d srb t n h a n h o a i n e o h p i t r q a o t e me n a d t e c v r a c f t e o i i t t iti u i ;t e me n a d t e c v ra c f t e o n s we e e u lt h o a n h o a i n e o h rg nm
M e s r me t n n r l c n q e a u e n d Co t a o Te h i u
卡尔曼滤波应用实例

卡尔曼滤波应用实例1. 介绍卡尔曼滤波是一种状态变量滤波技术,又称为按时间顺序处理信息的最优滤波。
最初,它是由罗伯特·卡尔曼(Robert Kalman)在国防领域开发的。
卡尔曼滤波是机器人领域中常用的滤波技术,用于估计变量,如机器人位置,轨迹,速度和加速度这些有不确定性的变量。
它利用一组测量值,通过机器学习的形式来观察目标,以生成模糊的概念模型。
2. 应用实例(1) 航迹跟踪:使用卡尔曼滤波可以进行航迹跟踪,这是一种有效的状态估计技术,可以处理带有动态噪声的状态变量跟踪问题。
它能够在航迹跟踪中进行有效的参数估计,而不受环境中持续噪声(如气动噪声)的影响。
(2) 模糊控制:模糊控制是控制系统设计中的一种重要方法,可用于解决动态非线性系统的控制问题。
卡尔曼滤波可用于控制模糊逻辑的控制政策估计。
它能够以更低的复杂性和高的控制精度来解决非线性控制问题,是一种高度有效的模糊控制方法(3) 定位和导航:使用卡尔曼滤波,可以实现准确的定位和导航,因为它可以将具有不确定性的位置信息转换为准确可信的信息。
这对于记录机器人的行走路径和定位非常重要,例如机器人搜索和地图构建中可以使用卡尔曼滤波来实现准确的定位和导航。
3. 结论从上文可以看出,卡尔曼滤波是一种非常强大的滤波技术,可以有效地解决各种由动态噪声引起的复杂问题。
它能够有效地解决估计(如机器人的位置和轨迹),控制(模糊控制)和定位(定位和导航)方面的问题。
而且,卡尔曼滤波技术具有计算速度快,参数估计效果好,能有效弥补传感器误差,还能够避免滤波状态混淆,精度较高等特点,可以在很多领域中广泛应用。
卡尔曼滤波在车辆定位系统中的应用

卡尔曼滤波在车辆定位系统中的应用随着智能交通的不断发展,车辆定位系统已成为现代交通运输领域不可或缺的一部分。
车辆定位系统可以通过对车辆的位置、速度、方向等信息进行实时监测和处理,为车辆驾驶员和交通管理部门提供准确、可靠的信息支持,从而提高车辆的安全性、效率性和舒适性。
而卡尔曼滤波作为一种常见的信号处理方法,已经在车辆定位系统中得到广泛的应用。
一、卡尔曼滤波的基本原理卡尔曼滤波是一种基于贝叶斯统计学理论的最优估计方法,能够通过对已知数据和未知数据的联合概率分布进行递归计算,得到最优的估计结果。
在车辆定位系统中,卡尔曼滤波主要用于对车辆位置、速度、方向等信息进行滤波处理,从而减少噪声干扰,提高定位精度。
卡尔曼滤波的基本流程如下:1. 系统建模:将系统状态和观测量表示为数学模型,建立状态转移方程和观测方程。
2. 预测阶段:根据系统状态的当前值和状态转移方程,预测系统状态的下一步值。
3. 更新阶段:根据观测量和观测方程,计算观测量的期望值和方差,并将预测值和观测值进行合并,得到最优的估计值和方差。
二、卡尔曼滤波在车辆定位系统中的应用1. 车辆位置估计在车辆定位系统中,卡尔曼滤波可以用于对车辆位置进行估计。
通过对车辆的速度、加速度、航向角等信息进行处理,可以得到车辆的位置信息。
同时,卡尔曼滤波还可以通过对车辆位置的历史数据进行分析,预测车辆未来的位置,从而提高车辆定位的准确性和稳定性。
2. 车辆速度估计车辆速度是车辆定位系统中一个重要的参数,可以用于判断车辆的运动状态和行驶路线。
卡尔曼滤波可以通过对车辆加速度和航向角等信息进行处理,估计车辆的速度。
同时,卡尔曼滤波还可以对车辆速度的历史数据进行分析,预测车辆未来的速度,从而提高车辆定位的准确性和稳定性。
3. 车辆方向估计车辆方向是车辆定位系统中另一个重要的参数,可以用于判断车辆行驶的方向和角度。
卡尔曼滤波可以通过对车辆航向角的历史数据进行分析,估计车辆的方向。
卡尔曼滤波在目标跟踪中的应用
卡尔曼滤波在目标跟踪中的应用卡尔曼滤波是一种常用的目标跟踪算法,它通过预测和更新两个步骤,能够有效地估计目标的状态,对于实时目标跟踪有着重要的应用。
在目标跟踪中,我们通常需要根据已有的观测数据,来预测目标的未来位置或状态。
然而,由于观测数据往往存在噪声和不确定性,仅仅依靠单个观测值进行预测往往会引入较大的误差。
卡尔曼滤波通过对系统的动态模型和测量模型进行建模,能够准确地预测目标的状态,并根据新的观测数据进行更新,从而提高目标跟踪的精度。
卡尔曼滤波的核心思想是通过融合先验估计和观测数据,得到后验估计,从而更准确地估计目标的状态。
在预测步骤中,利用系统的动态模型和先验估计,通过状态转移方程对目标的状态进行预测。
在更新步骤中,根据观测数据和测量模型,通过测量方程对预测值进行修正,得到更准确的后验估计。
卡尔曼滤波的核心是卡尔曼增益,它用于衡量观测数据的权重。
卡尔曼增益越大,观测数据的权重越大,反之亦然。
卡尔曼增益的计算依赖于系统噪声和测量噪声的协方差矩阵,以及先验估计和观测数据之间的协方差矩阵。
通过调整卡尔曼增益,可以在系统噪声和观测噪声之间取得一个平衡,从而实现对目标状态的准确估计。
卡尔曼滤波在目标跟踪中有着广泛应用。
例如,在无人机跟踪目标的场景中,通过传感器获取目标的位置和速度信息,可以利用卡尔曼滤波对目标的运动进行预测,并根据新的观测数据对预测值进行修正,从而实现对目标的精确跟踪。
另外,在自动驾驶领域,卡尔曼滤波也被广泛应用于车辆的目标检测和跟踪,通过对车辆状态的准确估计,可以实现自动驾驶系统的精确控制。
除了目标跟踪,卡尔曼滤波还在其他领域有着重要的应用。
例如,在导航系统中,卡尔曼滤波可以用于优化地图匹配和位置估计,提高导航的精度和鲁棒性。
在信号处理中,卡尔曼滤波可以用于降噪和提取有效信号,从而改善信号质量。
在机器人领域,卡尔曼滤波可以用于机器人的定位和建图,实现自主导航和环境感知。
卡尔曼滤波在目标跟踪中有着广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计论文题目无迹卡尔曼滤波在目标跟踪中的应用专业名称学生姓名指导教师毕业时间毕业任务书一、题目无迹卡尔曼滤波在目标跟踪中的应用二、指导思想和目的要求利用已有的专业知识,培养学生解决实际工程问题的能力;锻炼学生的科研工作能力和培养学生的团结合作攻关能力;三、主要技术指标1、熟悉掌握无迹卡尔曼滤波的基本原理;2、对机动目标进行跟踪;四、进度和要求第01周----第02周:英文翻译;第03周----第04周:了解无迹卡尔曼滤波的发展趋势;第05周----第06周:学习无迹卡尔曼滤波基本原理;第07周----第09周:掌握Matlab编程,熟悉开发环境;第10周----第11周:学习常用目标的机动模型;第12周----第13周:编写程序,调试验证;第14周----第16周:撰写毕业设计论文,论文答辩;五、参考文献和书目1. 张勇刚,李宁,奔粤阳,等. 最优状态估计-卡尔曼及非线性滤波[M],国防工业出版社,2013。
2. 冯志全,孟祥旭,蔺永政,等.UKF滤波器的强跟踪性研究[J].小型微型计算机系统, 2006, 27(11): 2142-2145。
3. 潘泉,杨峰,叶亮,等.一类非线性滤波器-UKF综述[J].控制与决策, 2005, 20(5): 481-489。
4.宋迎春. 动态定位中的卡尔曼滤波研究[D]. 博士学位论文;长沙:中南大学, 2006。
5.贺觅知.基于卡尔曼滤波原理的电力系统动态状态估计算法研究[D].西安:西安交通大学,2006。
6.孙清,张陵,张爱社,伍晓红,等.基于扩展卡尔曼滤波(EKF)的结构动态物理参数识别[A];第十届全国结构工程学术会议论文集第Ⅲ卷[C];2001年。
7.黄铫.一种扩维无迹卡尔曼滤波.电子测量与仪器学报[J].2009,2009增刊:56-60。
8.柴霖,袁建平,罗建军,等。
非线性估计理论的最新进展[J].宇航学报,2005,26(3):380-384。
9.何衍.机动目标跟踪与传感器网络自组织[D];博士学位论文.浙江大学:2001年。
10.汪雄良.基于参数化技术的目标跟踪方法[D];博士学位论文.国防科学技术大学;2002年。
11.祝石厚.基于卡尔曼滤波算法的动态谐波状态估计技术研究[D].重庆:重庆大学,2008,5。
12.于静文,薛蕙,温渤婴,等.基于改进的RBAUKF的电力频率跟踪新算法[M].电测与仪表.2010,47(537):22-26。
13.于静文.基于卡尔曼滤波的电能质量分析方法综述[J].电网技术。
2010,34(2):97-102。
14.魏崇毓,徐善驾,王东进,等.多探测器目标跟踪算法分析[A];第九届全国信号处理学术年会(CCSP-99)论文集[C];1999年。
15.王宏强.目标融合跟踪技术及性能预测研究[D];博士学位论文.中国人民解放军国防科学技术大学;2002年。
学生指导教师系主任摘要由于卡尔曼滤波器具有结构简单、性能最优、易于被掌握和应用等一系列的优点其已被广泛应用于状态跟踪和估计等科学领域。
值得一提的是,由于其线性的推导和计算过程,决定了卡尔曼滤波器不能应用于非线性系统。
本文主要研究的是UKF滤波方法的滤波性能、现存问题和改进方法。
首先,介绍卡尔曼滤波在军事等领域的实际应用以及其今后的发展趋势,而后,初步了解卡尔曼滤波的意义,显著地改善动态跟踪精度,它在目标跟踪中不仅利用当前的量测值,而且充分利用以前的量测数据,根据线性最小方差原则求出最优估计。
连续系统的卡尔曼滤波方程以及离散系统的卡尔曼滤波方程让我们对其在线性化的处理有了深刻的印象。
同时,通过比例Unscented变换方法,可以更为准确地求得随机分布经过非线性变换后的均值和方差。
再次,在机动目标跟踪过程中,目标的状态模型和量测模型,直角及极坐标系下跟踪系统模型等等能更好的与实际的目标运动学相匹配。
最后,滤波算法在目标跟踪中的分析,能仿真出卡尔曼滤波和无迹卡尔曼滤波在运动中的状态估计。
关键词:UKF、均值、Unscented变换方法、状态模型、量测模型ABSTRACTBecause the kalman filter has simple structure, the optimal performance, easy to master and application and so on a series of advantages, it has been widely used in scientific fields such as status tracking and estimation. Be worth what carry is, because of its derivation and calculation of the linear process, determine the kalman filter can not be applied to nonlinear system. This paper studies the UKF filter method of filtering performance, existing problems and improving methods.First of all, this paper introduces the practical application of kalman filtering in the fields such as military and its development trend in the future.And then a preliminary understanding of the meaning of the kalman filter, significantly improve the dynamic tracing accuracy, it is not only in target tracking using the current measurement value, and make full use of the previous measurement data, according to the linear minimum variance principle to find the optimal estimation. Kalman filtering equation of continuous system and discrete system let us in the kalman filter equation linearized processing has a deep impression. At the same time, through the Unscented transform method, random distribution can be obtained more accurately after nonlinear transform of the mean and variance.Again, in the process of maneuvering target tracking, the state of the target model and measurement model, right Angle tracking system and polar coordinate model and so on can better match the actual target kinematics.Finally, the analysis of the filtering algorithm in target tracking, can simulate the kalman filtering and no trace of the kalman filter state estimation in the movement.KEYWORDS:UKF, average, unscented transformation method, the state model, the measurement model目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 研究背景及意义 (1)1.2 卡尔曼滤波技术的现状 (2)1.3 有待解决的问题和发展趋势 (6)第二章无迹卡尔曼滤波的基础理论 (10)2.1 基本卡尔曼滤波 (10)2.1.1 连续系统的卡尔曼滤波方程 (10)2.1.2 离散系统的卡尔曼滤波方程 (11)2.1.3 离散卡尔曼滤波的分析 (13)2.2克服滤波发散的滤波方法 (14)2.2.1 加权衰减记忆滤波 (14)2.2.2 平方根滤波器 (17)2.3 非线性系统的卡尔曼滤波 (18)2.4 VD算法描述 (21)2.5 Unscented变换和对称采样策略 (22)2.6 UKF滤波的实现算法 (23)2.7 影响UKF精度的主要因素 (25)2.8 本章小结 (26)第三章跟踪模型的建立 (27)3.1 目标的状态模型和量测模型 (27)3.2 跟踪坐标系的选取 (27)3.2.1 直角坐标系下跟踪系统模型 (28)3.2.2 极坐标下跟踪系统模型 (28)3.2.3 量测模型的坐标转换 (29)3.3 机动目标模型的建立 (29)3.3.1 CV与CA模型 (30)3.3.2 时间相关模型(singer模型) (30)3.3.3 Noval统计模型 (31)3.3.4 机动目标“当前”统计模型 (31)3.4 本章小结 (32)第四章滤波算法在目标跟踪中的分析及比较 (33)4.1仿真想定设置 (33)4.2仿真结果及分析 (34)4.2.1 匀速直线运动仿真分析 (34)4.2.2 S形机动模型 (37)4.3 本章小结 (40)第五章结束语 (41)5.1 本文总结 (41)5.2 发展与展望 (41)参考文献 (44)致谢 (46)毕业设计小结 (47)第一章绪论1.1 研究背景及意义不管在现代军事领域、国防领域还是民用领域中,目标跟踪技术均占有非常重要的地位。
但是被探测目标的不确定性也随着现代目标隐身技术的发展以及目标机动性能的增强而增加。
尤其是在航空航天技术飞速发展的今天,作战条件以及战场环境翻天覆地的变化,迫使我们不能简单的对规则运动目标进行探测跟踪,一旦目标发生例如转向、减速、加速、下降、上升、S 型等突然的运动形态的改变,即目标发生机动时,若要对目标进行稳定、精确地跟踪就会变得很困难。