系统建模与仿真设计

异步电机直接转矩控制系统的建模与仿真
摘要:直接转矩控制(Direct Torgue Control,DTC)系统利用空间矢量的分析方法,直接在定子坐标系下计算和控制交流电动机的磁链和转矩。采用定子磁场定向,直接跟踪定子磁链和转矩。借助于离散的两点式调节(Bang—Bang控制)产生PWM信号,对逆变器的开关状态进行最佳控制,以获得高动态性能的转矩响应。为了能够更好的观测圆形磁链轨迹,了解直接转矩控制的特点及其所能达到的效果,对异步电动机直接转矩控制的基本原理进行充分分析的基础上,采用圆形磁链轨迹控制方法,建立了异步电动机直接转矩控制系统的Simulink仿真模型。通过对磁链、转矩估算模型的分析设计出了磁链转矩估算的u-i模型。考虑到实际中对转矩的需要是第一位的,本文制定了优先调节转矩的控制策略,为了能够更好的实现对转矩的控制,专门设计了转矩的三值调节器,并在电压空间矢量选择上,以优先考虑达到转矩要求。
关键词:直接转矩控制;异步电动机建模;MATLAB仿真
1. 引言
电气传动是现代最主要的机电能量变换形式之一。在当今社会中广泛应用着各式各样电气传动系统,其中许多机械有调速的要求:如车辆、电梯、机床、造纸机械、纺织机械等等,为了满足运行、生产、工艺的要求往往需要调速的另一类设备如风机、水泵等为了减少运行损耗,节约电能也需要调速。在上世纪80年代以前,直流传动是唯一的电气传动方式。这是因为直流电动机调速方便,只要改变电机的输入电压或励磁电流,就可以在宽广的范围内实现无级调速,而且在磁场一定的条件下它的转矩和电流成正比,从而使得它的转矩易于控制、转矩的调节性能和控制性能比较理想。
2. 直接转矩控制理论
直接转矩控制DTC(Direct Torque Control)变频调速技术是近十几年来继矢量控制变频调速技术之后发展起来的一种新型的具有高性能的交流变频调速技术。直接转矩控制技术基于定子两相静止参考坐标系,一方面维持转矩在给定值
附近,同时另一方面维持定子磁链沿着给定轨迹(预先设定,如六边形或近似圆形)运动。在经典DTC 控制结构中,采用Bang —Bang 控制器对交流电机的电磁转矩和定子磁链幅值直接进行闭环Bang —Bang 控制,从而将转矩与磁链的脉动限定在预定的范围内,当实际值超过调节范围的上下限时,Bang-Bang 控制器就会产生动作,输出的数字控制量就会发生变化。借助空间电压矢量的分析方法,利用该数字控制量产生PWM 信号,直接对逆变器的开关状态进行最佳控制。
2.1 异步电机动态数学模型
交流异步电机的数学模型相当复杂,它是一个高阶,非线性,强耦合的多变量系统,坐标变换的目的就是要简化数学模型。在讨论交流异步电机的数学模型前假设电机有如下特性:
(1)电动机三相定、转子绕组完全对称。
(2)电动机定、转子表面光滑,无齿槽效应。
(3)电动机气隙磁动势在空间正弦分布。
(4)铁心涡流、饱和及磁滞损耗忽略不计。
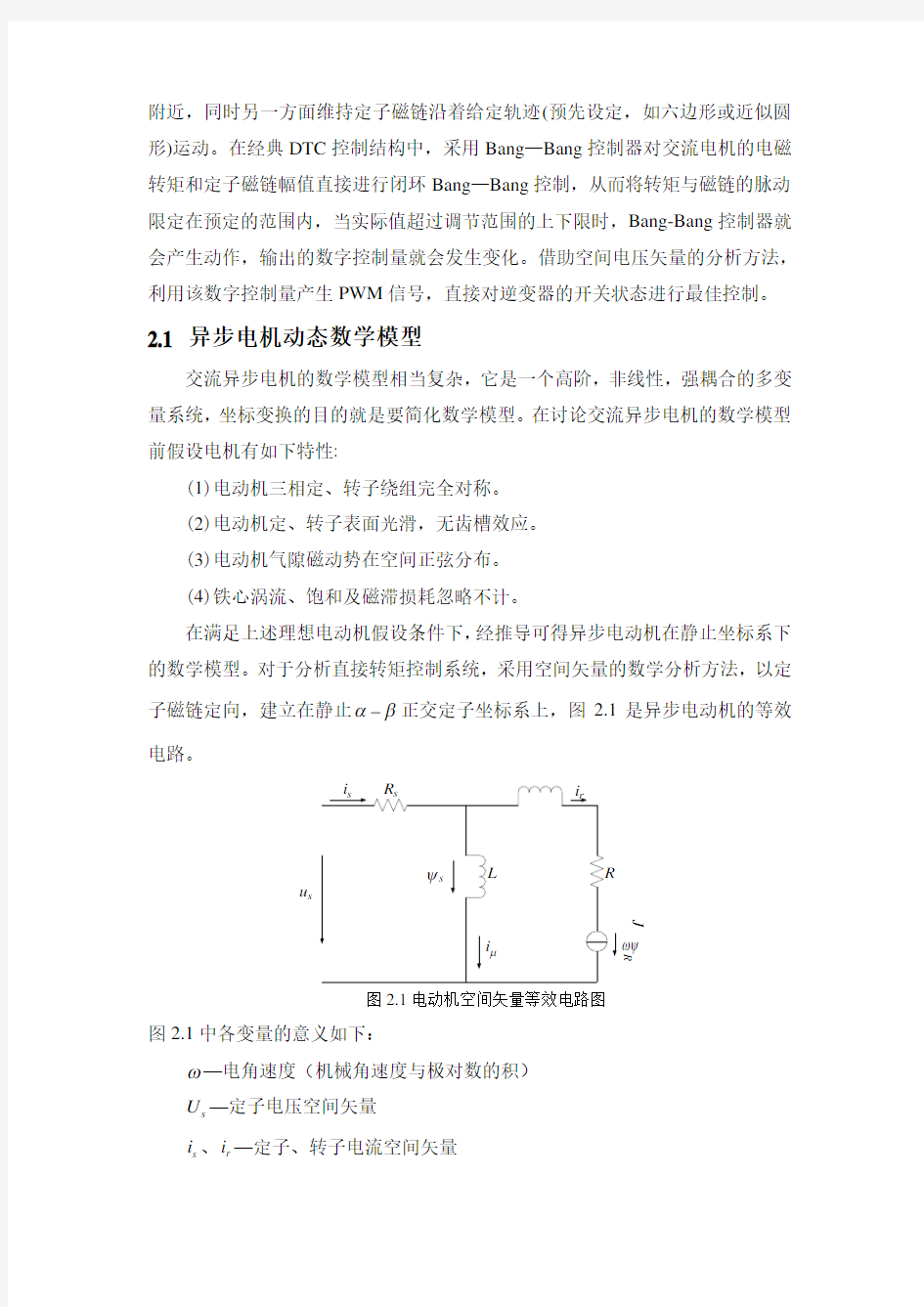
在满足上述理想电动机假设条件下,经推导可得异步电动机在静止坐标系下的数学模型。对于分析直接转矩控制系统,采用空间矢量的数学分析方法,以定子磁链定向,建立在静止βα-正交定子坐标系上,图2.1是异步电动机的等效电路。
s u s i s R s ψL i μ
r
i R
R J
ωψ
图2.1电动机空间矢量等效电路图
图2.1中各变量的意义如下:
ω—电角速度(机械角速度与极对数的积)
s U —定子电压空间矢量
s i 、r i —定子、转子电流空间矢量
s ψ、r ψ—定子、转子磁链空间矢量
s R 、L —单相定子电阻、电感
r R —折算到定子侧的单相转子电阻
σL —单相转子漏感与定子漏感之和
由图2.2可以得出定子电压方程转子电压方程:
dt
d i R U s s s s ψ+= (2—1) r r r r j dt
d i R ωψψ+-
=0 (2—2) 而定子磁链与转子磁链: r m s s s i L i L +=ψ (2—3)
s m r r r i L i L +=ψ (2—4)
转矩方程:消去电压方程和磁链方程中的s i 和r i ,可以得到定子磁链s ψ、r ψ为状态变量的异步电动机的状态方程。
s r s r r r r
s m
r r s m s r s s r s U L R j L L L R L L L R L L R d d ??????+???????????
???????--=??????01ψψσωσσσψψ (2—5) 其中电机漏感系数 r
s m L L L 2
1-=σ (2—6)
电机的电磁转矩可以表示为定子磁链和转子磁链的形式: θψψσψψσsin 2323r s r
s m r s r s m e L L L P L L L P T =?= (2—7) 此外电磁转矩还可以表示成定子磁链和定子电流形式:
)(2
3s s s s e i i P T αββαψψ-= (2—8) 运动方程:
)/(dt d P J T T r n
L e ω=- (2—9) 式2—7中,θ为定子磁链与转子磁链之间的夹角,即磁通角。
在实际运行中,保持定子磁链的幅值为额定值,以便充分利用电机,而转子磁链幅值由负载决定。当维持定子磁链和转子磁链的幅值都恒定不变时,只要改变它们两者之间的夹角就可以改变转矩,这实际上就是直接转矩控制之所以简单的根本所在。
2.2 逆变器的数学模型与电压空间矢量
逆变器如图2.2所示,每一组的上下两个开关器件的状态相反,这样逆变器共有8种开关状态组合。逆变器上、下桥臂的开关器件在任一时刻不能同时导通, 一个处于开通的状态另一个必须处于断开的状态,两者处于开关互逆状态。 M
E
E
V1V2V3V4V5
V6
Ua Uc b
U
图2.2电压型逆变器原理图
由于同一相上下桥臂的两个开关器件一个导通,则另一个关断,所以三组开关器件有八种可能的开关组合。分别用a S 、b S 、c S 来表示三相上桥臂的开关状态,以a 相为例,当a 相上桥臂导通时,记作1=a S ,当a 相上桥臂关断时,记作0=a S 。这样八种可能的开关状态如表2.1所示:
表2.1 逆变器的开关状态 状态
0 0 2 3 4 5 6 7 S a
0 1 0 0 1 1 1 1 S b
0 0 1 1 0 0 1 1 S c 0 1 1 1 1 0 0 1
八种可能的开关状态可以分成两类:一类是六种所谓的工作状态,即如上表中的状态“1”到“6”,它们的特点是三相负载并不都是接到相同的电位上去;另一类开关状态是零开关状态,即表中的状态“0”和状态“7”,它们的特点是
三相负载都接到相同的电位上去。对于逆变器的八种开关状态,对外部负载来说,逆变器输出七种不同的电压状态。这七种不同的电压状态也分成两类:一类是六种工作电压状态,它对应于开关状态“1”至“6”,分别称为逆变器的电压状态“1”至“6”;另一类是零电压状态,它对应于零开关状态“0”和“7”,由于对外来说,输出的电压都为零,因此统称为逆变器的零电压状态。
逆变器输出电压状态的空间矢量的数学表达式为:
)2(31c b a a S S S E U --=
(2—10) )2(31c a b b S S S E U --=
(2—11) )2(3
1c a c c S S S E U --= (2—12) 把逆变器的输出电压用电压空间矢量来表示,则逆变器的各种电压状态和次序就有了空间的概念。在这里我们引入Park 矢量变换,选三相定子坐标系中的a 轴和Park 矢量复平面正交的实轴重合,则其三相物理量a U 、b U 、c U 的Park 矢量()s t u 为:
??????++=343232)(π
πj c j b a s e u e u u t u
(2—13)
从而我们可以得到逆变器的7个电压状态,(000和111为零状态)六个为有效电压矢量,幅值均为
32dc u ,相邻矢量相差60度,把整个平面均匀的划分成六个扇区如图2.3所示。 (010)S U (110)
S U (011)S U (100)
S U (001)S U (101)S U β123
456
000111b
图2.3电压空间矢量在坐标系里的离散位置
3. 直接转矩控制系统的MATLAB仿真
3.1异步电机及PWM控制模块仿真
异步电动机又称感应电动机,是由气隙旋转磁场与转子绕组感应电流相互作用产生电磁转矩,从而实现机电能量转换为机械能量的一种交流电机。在本次仿真的设计中,为了减少设计时间,异步电机的模块直接在库中选择。异步电机的选取如图3.1所示。
图3.1异步电机仿真模块
异步电机的参数设置如图3.2所示。
图3.2异步电机参数设置
PWM控制模块即逆变器模块,这里根据书本的要求选取一个模块来实现。通过它的8种可能的开关组合。来控制异步电机的运行。逆变器模块的选取以及参数的设置如图3.3和3.4所示。
图3.3逆变器模块选取
图3.4逆变器参数设置
3.2三相-两相变换(3/2变换)
在三相静止绕组A、B、C和两相静止绕组a、b之间的变换,或称三相静止坐标系和两相静止坐标系间的变换,简称3/2 变换。这里需要将电压和电流进行3/2变换。3/2变换的模块如图3.5和3.6所示。
图3.5电压3/2变换
图3.6电流3/2变换
图3.7电压3/2变换设置
图3.8电流3/2变换设置
3.3转速调节器(ASR)
转速调节器调节的目的是为了是转速等于给定值,实际上它是通过调节电流转矩分量,以抵消转子磁链变化对电磁转矩的影响最后达到平衡,但是这种调节只有在转速发生变化后才起作用,为了改善动态性能,可以采用转矩控制方式,常用的转矩控制方式有两种:转矩闭环控制和在转速调节器的输出增加除法环节。ASR的设置如图3.9所示。
图3.9转速调节器ASR的设置
3.4定子磁链的计算和转矩计算模块
根据直接转矩控制系统的原理结构,定子磁链的计算模块需要将电压电流经过3/2变换后的信号转换为磁链。再经过转矩计算模块得到一个转矩与给定转矩
图3.10计算模块的设置
3.5空间电压矢量的选择模块
直接转矩控制是电机的量经过转化,转化为变频器需要的量。其中的转化是直接转矩控制,然后把最终量给变频器。在转换的过程中就要考虑到扇区的选择和空间电压矢量的选择。这里的选择方法采用了老师上课时讲到的方法。具体的模块如图3.11所示。
图3.11选择模块的设置
在模块的内部,对所采集到的信号进行了相关处理,最后生成一个控制信号给逆变器,达到控制异步电机的目的。模块内部的设置如图3.12所示。
图3.12选择模块内部的设置
图3.13扇区的选择
图3.14空间电压矢量的选择
4. 仿真结果及分析
根据第3章的仿真模块以及设置,运行的仿真结果如下图所示。仿真电机参数如下:额定功率为15KW,额定电压为400V,额定转速为1460r/min频率为工频50赫兹,取摩擦系数为0。
系统给定值如下:刚开始让异步电机运行到额定转速1460r/min,在0.6s时改变其转速变为1250r/min。
图4.1磁链结果
图4.2转速结果
图4.3三相定子电流
图4.4转矩Te
在转矩计算模块后得出的转矩Te1也用一个示波器进行了测量,结果如图4.5所示。
图4.5转矩Te1
根据仿真的结果图显示,所得的结果比较理想,但是在0.6s时PI调节器还存在部分问题。这是后续需要改进的地方。本文采用圆形磁链轨迹控制方法,建立了异步电动机直接转矩控制系统的Simulink仿真模型。通过对磁链、转矩估算模型的分析设计出了磁链转矩估算的u-i模型。考虑到实际中对转矩的需要是第一位的,本文还制定了优先调节转矩的控制策略,为了能够更好的实现对转矩的控制,专门设计了转矩的三值调节器,并在电压空间矢量选择上,以优先考虑达到转矩要求。
5. 参考文献
[1] 李迅,刘五陵,桂卫华等.基于最大转矩控制的异步电机直接转矩弱磁控制方法[J].中南大学学报(自然科学版),2012,43(1):177-183.
[2] 张令霞,张兴华.直接转矩控制系统的Matlab建模与仿真[J].电气传动,2011,41(1):9-13.
[3] 荣强,孙旭东,张杰等.基于分层优化的异步电机直接转矩预测控制[J].电机与控制应用,2013,(12):34-38,46.
[4] 袁琼珍. 新型SVM异步电机控制的仿真研究[J].防爆电机 2014.
[5] 魏祥林. 基于Simulink的异步电机DTC系统的详细建模与仿真[J].微电机 2014.
系统建模与仿真
一、基本概念 1、数字正弦载波调制 在通信中不少信道不能直接传送基带信号,必须用基带信号对载波波形的某些参量进行控制,使得载波的这些参量随基带信号的变化而变化,即所谓数字正弦载波调制。 2、数字正弦载波调制的分类。 在二进制时, 数字正弦载波调制可以分为振幅键控(ASK)、移频键控(FSK)和移相键控(PSK)三种基本信号形式。如黑板所示。 2、高斯白噪声信道 二、实验原理 1、实验系统组成 2、实验系统结构框图
图 1 2FSK信号在高斯白噪声信道中传输模拟框图 各个模块介绍p12 3、仿真程序 x=0:15;% x表示信噪比 y=x;% y表示信号的误比特率,它的长度与x相同FrequencySeparation=24000;% BFSK调制的频率间隔等于24KHz BitRate=10000;% 信源产生信号的bit率等于10kbit/s SimulationTime=10;% 仿真时间设置为10秒SamplesPerSymbol=2;% BFSK调制信号每个符号的抽样数等于2 for i=1:length(x)% 循环执行仿真程序 SNR=x(i);% 信道的信噪比依次取中的元素 sim('project_1');% 运行仿真程序得到的误比特率保存在工作区变量BitErrorRate中 y(i)=mean(BitErrorRate); end hold off% 准备一个空白的图 semilogy(x,y);%绘制的关系曲线图,纵坐标采用对数坐标 三、实验结论
图 4 2FSK信号误比特率与信噪比的关系曲线图 系统建模与仿真(二) ——BFSK在多径瑞利衰落信道中的传输性能 一、基本概念 多径瑞利衰落信道 二、实验原理 1、实验系统组成
图书管理系统UML建模
图书管理系统UML建模: 1.1、确定系统涉及的总体信息 (1)读者: ?借书 ?还书 ?书籍预定 (2)图书馆管理员: ?书籍借出处理 ?书籍归还处理 ?预定信息处理 (3)系统管理员: ?增加书目 ?删除或更新书目 ?增加书籍 ?减少书籍 ?增加读者帐户信息 ?删除或更新读者帐户信息 ?书籍信息查询 ?读者信息查询 1.2.确定系统的参与者 (1)分析系统所涉及的问题领域和系统运行的主要任务:?分析使用该系统主要功能部分的是哪些人 ?谁将需要该系统的支持以完成其工作 ?系统的管理者与维护者 (2)图书馆管理系统的参与者: ?读者(借阅者) ?图书馆管理员 ?图书馆管理系统维护者 1.3.确定系统的用例 1.3.1借阅者请求服务的用例 (1)查询借阅者信息 (2)查询书籍信息 (3)增加书目 (4)删除或更新书目 (5)增加书籍 (6)删除书籍 (7)添加借阅者帐户
(8)删除或更新借阅者帐户 1.3.2 图书馆管理员处理借书、还书等的用例 (1)处理书籍借阅 (2)处理书籍归还 (3)删除预定信息 1.3.3系统管理员进行系统维护的用例 (1)查询借阅者信息 (2)查询书籍信息 (3)增加书目 (4)删除或更新书目 (5)增加书籍 (6)删除书籍 (7)添加借阅者帐户 (8)删除或更新借阅者帐户 1.4.使用Rational Rose绘制用例图的步骤(具体详见教材P83-92) 1.创建用例图 2.用例图工具栏按钮简介 3.工具栏的定制 4.添加参与者与用例 5.添加参与者与用例之间的关系 6.添加用例之间的关系 1.5.图书馆管理系统的用例图 1.5.1借阅者请求服务的用例图
中文--Call For Papers-ISMSCS-第一届复杂管理系统建模与仿真国际研讨会-
第一届(2013)复杂管理系统建模与仿真国际研讨会征文通知 仿真建模、分析与优化,已经成为解决复杂管理系统的重要手段,正日益受到理论界和实践界的广泛关注。本会议的目标,旨在为国内外从事复杂管理系统建模与仿真的研究及实践人员提供一个高水平的、专业的论坛,通过思想碰撞与信息交流,探讨系统仿真领域的最新理论和实践,促进相互合作,进而推动仿真建模、分析与优化技术在复杂管理系统中的研究与应用。本会议邀请了国内外在仿真领域卓有建树的知名学者参加,如美国建模与仿真学会(SCS )主席J. Fowler 教授,美国冬季仿真会议(WSC )主任委员会委员J. Smith 教授,2012年WSC 会务主席美国亚利桑那大学Y .J. Son 教授等;以及中国系统仿真学会、广东省系统工程学会推荐的众多专家学者。会议将请各位专家学者就仿真理论、技术及其应用的最新进展做主题报告,大会还将组织针对性强的分组专题报告与研讨。第一届(2013)复杂管理系统建模与仿真国际研讨会期待您的参与和交流。 主办单位: 中国系统仿真学会离散仿真专业委员会 广东省系统工程学会 深圳大学 承办单位:深圳大学(管理学院) 赞助单位:深圳本斯集团 会议地点:中国·广东·深圳 会议网站:https://www.360docs.net/doc/9c11044871.html,/ismscs13/ 会议时间:2013年6月1日至2日 会议主席:李凤亮教授,深圳大学副校长 大会执行主席: 陈智民教授,深圳大学管理学院院长 周泓教授,北京航空航天大学 张光宇教授,广东省系统工程学会 Dr. J. Fowler ,Arizona StateUniv . (USA) Dr. J. Smith ,Auburn Univ . (USA) Dr. Y .J. Son ,Univ . of Arizona (U SA) 学术委员会主席:周泓教授,北京航空航天大学 学术委员会委员: Dr. J. Fowler ,Arizona StateUniv . (USA) Dr. J. Smith ,Auburn Univ . (USA) Dr. Y .J. Son ,Univ . of Arizona (U SA) Dr. P. Ahrweiler, Univ . of Dublin (Ireland) 范文慧教授,清华大学 何世伟教授,北京交通大学 胡斌教授,华中科技大学 隽志才教授,上海交通大学 任佩瑜教授,四川大学 卫军胡教授,西安交通大学 魏新教授,广东工业大学 徐哲教授,北京航空航天大学 徐宗昌教授,装甲兵工程学院 张光宇教授,广东工业大学 周明教授,深圳大学 朱一凡教授,国防科技大学 戈鹏副教授,四川大学 刘蕾副教授,电子科技大学 龚晓光副教授,华中科技大学 潘燕春副教授,深圳大学 赵晗萍副教授,北京师范大学 会议主题:复杂管理系统建模、仿真与分析---理论研究与应用实践。 议题范围(会议议题包括但不限于以下方面): 1. 复杂管理系统建模:基于系统科学/系统工程的方法; 2. 仿真建模与分析的理论和方法,如离散事件仿真、系 统动力学仿真、多智能体仿真、嵌入式仿真等; 3. 仿真技术与工具; 4. 基于仿真的复杂系统优化; 5. 基于仿真的风险决策与分析; 6. 面向可持续发展的绿色生产与服务:基于仿真的研 究; 7. 系统仿真与信息系统整合:决策支持与智能化管理; 8. 仿真在复杂管理系统中的应用,包括生产制造系统、 供应链与物流系统、交通运输系统、计算机/通讯网络管理系统、医疗服务管理系统、旅游与智慧景区管理系统、作战与综合保障系统,以及循环经济、项目管理、流程再造、工程或技术管理、战略管理、信息管理与电子商务等各大领域。 会议出版物:会议拟将录用的论文以光盘形式出版,并申请国际权威检索机构(EI/ISTP )审查收录。 论文投递:论文请用英文撰写,MS W ord 编辑,采用电子投稿方式,投递至大会邮箱ismscs2013@https://www.360docs.net/doc/9c11044871.html, ,论文格式规范详见会议网站https://www.360docs.net/doc/9c11044871.html,/ismscs13/。 最佳论文奖:大会将评选最佳论文奖(最多3篇),并颁发获奖证书。 重要时间:2013年3月1日,论文扩展摘要或全文(最多6页)投稿截止;2013年4月1日,论文录用与否通知;2013年5月15日,大会注册截止;2013年6月1日-2日,会议召开。 费用:版面费800元(5页内),每超一页加100元;会务费700元每位。版面费和会务费学生减半,详见会议网站。
系统建模与仿真课程简介
系统建模与仿真 开课对象:工业工程开课学期:6 学分:2学分;总学时:48学时;理论课学时:40学时; 实验学时:0 学时;上机学时:8学时 先修课程:概率论与数理统计 教材:系统建模与发展,齐欢,王小平编著,清华大学出版社,2004.7 参考书: 【1】离散事件系统建模与仿真,顾启泰,清华大学出版社 【2】现代系统建模与仿真技术,刘兴堂,西北工业大学出版社 【3】离散事件系统建模与仿真,王维平,国防科技大学出版社 【4】系统仿真导论,肖田元,清华大学出版社 【5】建模与仿真,王卫红,科学出版社 【6】仿真建模与分析(Simulaton Modeling and Analysis)(3rd eds.),Averill M. Law, W.David Kelton,清华大学出版社/McGraw-Hill 一、课程的性质、目的和任务 建模与仿真是当代现代科学技术的主要内容,其技术已渗透到各学科和工程技术领域。本课程以一般系统理论为基础,让学生掌握适用于任何领域的建模与仿真的一般理论框架和基本方法。 本课程的目的和任务是使学生: 1.掌握建模基本理论; 2.掌握仿真的基本方法; 3.掌握一种仿真语言及仿真软件; 4.能够运用建模与仿真方法分析、解决工业工程领域的各种常见问题。 二、课程的基本要求 1.了解建模与仿真的作用和发展,理解组成要素。 2.掌握建模的几种基本方法,及模型简化的技术手段。 3.掌握建模的一般系统理论,认识随机数的产生的原因及统计控制方式。 4.能对离散事件进行仿真,并能分析运行结果。 三、课程的基本内容及学时分配 第一章绪论(3学时) 1.系统、模型、仿真的基本概念
《生产系统建模与仿真》教学大纲
《生产系统建模与仿真》教学大纲 (理论课程) 开课系(部):工程学院课程编号:010396 课程类型:专业课总学时:48 学分:3 适用专业:工业工程开课学期:2014-2015学年第一学期 先修课程:概率论与数理统计、C语言程序设计、系统工程导论 一、课程简述 《生产系统建模与仿真》是面向工程实际的应用型课程,是工业工程系的主导课程之一。学生通过本课程的学习能够初步运用仿真技术来发现生产系统中的关键问题,并通过改进措施的实现,提高生产能力和生产效率。 本课程具有较强的理论性,同时具有较强的实践性和应用性,能够有效增强学生的系统仿真理论基础,提高学生对系统仿真、分析工作的适应性,培养其开发创新能力。 本课程的教学目标是培养学生的设计能力、创新能力和工程意识。课程以制造型生产企业为核心,通过理论教学和实践环节相结合,阐述了离散事件系统建模与仿真技术在生产企业分析中的基本原理和方法。其容涉及计算机仿真技术在生产系统分析中的作用和原理、仿真软件的介绍,重点介绍排队系统、库存系统、加工系统以及输入、输出数据分析。本课程的目的是要求学生通过学习、课堂教育和上机训练,能了解如何运用计算机仿真技术模拟生产系统的布置和调度管理;并熟悉和掌握计算机仿真软件的基本操作和能够实现的功能;使学生了解计算机仿真的基本步骤。 二、课程要求 (一)教学方法 1、启发式课堂讨论 针对关键知识点、典型题和难题,通过教师提问,鼓励学生回答问题或请到讲台前做题,并请其他学生评判或提出不同的答案或不同的解决方法。目的是加强学生自主学习的能力和判断能力,培养主动思考的习惯,启发学生的探索精神。 2、重视在教学中加强知识演进的逻辑规律的讲解 提高学生的逻辑思维能力,培养学生分析问题、解决问题的能力。 3、加强计算机辅助设计、分析 将Flexsim仿真软件引入教学中。应用计算机辅助设计、分析,能方便的改变系统
根据AMESim的气动系统建模与仿真技术研究
基于AMESim的气动系统 建模与仿真技术研究(版本A)
本文主要内容如下 (1)推导气体的流量、温度和压力方程。 (2)基于AMESim对普通气动回路进行仿真分析。并推导气动系统常用元件的 数学方程,在此基础上对气动元件及系统进行模型仿真分析。 (3)对气动比例位置系统进行建模与仿真研究,在系统仿真模型基础上进行 故障仿真研究。最后探讨基于 AMESim 的气动比例位置系统实时仿真研究。
1.气动系统建模的理论基础 气动系统和元件建模的首要任务就是要充分的明确空气的物理性质和空气的热力学性质,为准确的元件建模和系统仿真奠定基础。气动元件的结构是十分复杂的,但其中的基本规律和数学描述一般还是比较清楚的。经过前人的大量研究发现,气动系统的动态特性从本质上讲可以抽象为由一些基本环节所组成,比如放气环节、惯性环节和气容充气环节等等。而它们之间又是通过压力、力、位移、容积等参数相互关联相互影响的。 1.1 流量方程 流量特性表示元件的空气流通能力,将直接影响气动系统的动态特性。 所有的压力降取决于下面两个基本参数: a)声速流导 C(Sonic Conductance)——[null] b)临界压力比b(Critical Pressure Ratio)[S*m4/kg] ISO6358标准孔口——
标准体积流量 设绝对温度T ,绝对压力p的工况下的体积流量为Q,基准状态和标准状态下的体积流量可表示为: 空气压缩机的输出流量通常用换算到吸入口的大气状态下的体积流量来表示。以上公式同样适用于从吸入口的大气状态到基准或标准状态的换算。 气动孔口流量 在气动系统中,一般需要计算通过节流口的气体压力、流量、温度等参数,但是由于气体的可压缩性,气体在通过节流口时是个很复杂的过程,节流口前后的流道突然收缩或扩张,气体在孔口前后均会形成涡流,产生强烈的摩擦,因而机械能变成热能具有不可逆过程。同时,由于流体运动的极不规则,同一界面上的各点参数极不均匀。为了研究气体的流量特性,基本上可将阀中的节流口理想地等价为一个小孔或收缩喷嘴,并用小孔或者收缩喷嘴的流量特性来表示其流量特性。
学生管理系统建模
学生管理系统建模 步骤 (1)分析并得出系统的主要参与者与主要用况,并画出系统的用况图。为所有的用况撰写脚本,将脚本放于单独的word文档中,并将文档与相应的用况相连接。 1)确定系统的使用者 通过对上面问题陈述的分析,我们可以发现系统的使用者主要有Student和Professor,同时还需要Registrar来维护这个系统。此外,由于需要打印Student列表,故需要参与者Billing System;由于需要自动维护课程目录的改变,故需要参与者Course Catalog。因此应该在用况视图中添加如图5-15所示的参与者。 2)确定系统的用况 通过对上面问题陈述的分析,我们可以知道参与者Student主要要做view report cards和register for courses 两件工作,而参与者Professor主要要做Select Courses to Teach和Submit Grades两件工作。参与者Registrar 要维护信息,即要做Maintain Professor Information和Maintain Student Information两件工作,此外Registrar 还要控制注册何时结束,即要做Close Registration的工作。由于安全性的原因,要使用系统还需要首先做Login的工作。因此,应在用况视图中添加如图5-16所示用况。 3)用况图 通过上面的分析我们确定了系统中的参与者,用况以及它们之间的关系,根据这些关系,可以画出系统用况视图中的Main用况图,如图5-17所示:
(2)实现关键用例。做出相应的顺序图和协作图,对于每一个协作,说明其静态结构和动态结构。 为了说明协作的动态结构,我们可以画出其顺序图与协作图。对于Login协作而言,由于只有一个边界类LoginForm与系统的使用者交互,而任何系统的使用者都必须登陆,故可画出其顺序图和协作图,如图5-18和图5-19所示。
管理系统仿真建模及应用结课论文
管理系统仿真建模及应用结课论文 题目:计算机仿真技术的研究与发展 学院: 班级: 姓名: 学号:
计算机仿真技术的研究与发展 摘要:系统仿真技术也称为系统模拟技术,所谓电子通信系统的计算机仿真,就是利用计算机对实际电子通信系统物理模型或数字模型进行试验,通过这样模型实验来对一个实际系统的性能和工作状态进行分析和研究。在科研领域,计算机技术与系统仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 关键字:计算机仿真技术;概述;现状;发展前景。 一、引言 计算机仿真技术是建立在系统科学、系统辨识、控制理论、计算方法和计算机技术等学科上的一门综合性很强的技术科学。它以计算机和专业实验设备为工具,以物理系统的数学模型为基础,通过数值计算的方法,对已经存在的或尚不存在的系统进行分析、研究和设计。目前,计算机仿真技术不但是科学研究的有力工具,也是分析、综合各类工程系统或非工程系统的一种研究方法和有力手段。 计算机仿真技术已经在机械制造、航空航天、交通运输、船舶工程、经济管理、工程建设、军事模拟以及医疗卫生等领域得到了广泛的应用。 二、计算机仿真概述 计算机仿真又称计算机模拟或计算机实验。所谓计算机仿真就是建立系统模型的仿真模型进而在电子计算机上对该仿真模型进行模拟
实验研究的过程。计算机仿真方法即以计算机仿真为手段,通过仿真模型模拟实际系统的运动来认识其规律的一种研究方法。计算机仿真作为分析和研究系统运行行为、揭示系统动态过程和运动规律的一种重要手段和方法, 随着系统科学研究的深入、控制理论、计算技术、计算机科学与技术的发展而形成的一门新兴学科。近年来, 随着信息处理技术的突飞猛进,使仿真技术得到迅速发展。 计算机仿真主要有以下三种仿真形式: 物理仿真:按照实际系统的物理性质构造系统的物理模型,并在物理模型上进行试验研究。直观形象,逼真度高,但代价高,周期长。在没有计算机以前,仿真都是利用实物或者它的模型来进行研究的。 半物理仿真:即物理数学仿真,一部分以数学模型描述,并把它仿真计算模型,一部分以实物方式引入仿真回路。针对存在建立数学模型困难的子系统的情况,必须使用此类仿真,如航空航天、武器系统等研究领域。 数字仿真:首先建立系统的数学模型,并将数学模型转化为仿真计算模型,通过仿真模型的运行达到对系统运行的目的。现代计算机仿真由仿真系统的软件/硬件环境,动画与图形显示、输入/输出等设备组成。 作为新兴的技术方法,与传统的物理实验相比较,计算机仿真有着很多无可替代的优点: 1. 模拟时间的可伸缩性 由于计算机仿真受人的控制,整个过程可控性比较强,仿真的时间可
生产系统建模与仿真教学文案
生产系统建模与仿真 实验报告 实验一Witness仿真软件认识 一、实验目的 1、学习、掌握Witness仿真软件的主要功能与使用方法; 2、学习生产系统的建模与仿真方法。 二、实验内容 学习、掌握Witness仿真软件的主要功能与使用方法 三、实验报告要求 1、写出实验目的: 2、写出简要实验步骤; 四、主要仪器、设备 1、计算机(满足Witness仿真软件的配置要求) 2、Witness工业物流仿真软件。 五、实验计划与安排 计划学时4学时 六、实验方法及步骤 实验目的: 1、对Witness的简单操作进行了解、熟悉,能够做到基本的操作,并能够进行简单的基础建模。 2、进一步了解Witness的建模与仿真过程。 实验步骤: Witness仿真软件是由英国lanner公司推出的功能强大的仿真软件系统。它可以用于离散事件系统的仿真,同时又可以用于连续流体(如液压、化工、水力)系统的仿真。目前已成功运用于国际数千家知名企业的解决方案项目,有机场设施布局
优化、机场物流规划、电气公司的流程改善、化学公司的供应链物流系统规划、工厂布局优化和分销物流系统规划等。 ◆Witness的安装与启动: ?安装环境:推荐P4 1.5G以上、内存512MB及以上、独立显卡64M以上显存,Windows98、Windows2000、Windows NT以及Windows XP的操作系统支持。 ?安装步骤:⑴将Witness2004系统光盘放入CD-ROM中,启动安装程序; ⑵选择语言(English);⑶选择Manufacturing或Service;⑷选择授权方式(如加密狗方式)。 ?启动:按一般程序启动方式就可启动Witness2004,启动过程中需要输入许可证号。 ◆Witness2004的用户界面: ?系统主界面:正常启动Witness系统后,进入的主界面如下图所示: 主界面中的标题栏、菜单栏、工具栏状态栏等的基本操作与一般可视化界面操作大体上一致。这里重点提示元素选择窗口、用户元素窗口以及系统布局区。 ?元素列表窗口:共有五项内容,分类显示模型中已经建立和可以定义的模型元素。Simulation中显示当前建立的模型中的所有元素列表;Designer中显示当前Designer Elements中的所有元素列表;System中显示系默认的特殊地点;Type中
第一章 系统建模与仿真概述
第一章系统建模与仿真概述 系统:系统是由两个以上相互区别或相互作用的单元有机的结合在起来,完成某一功能的综合体。 系统的特征:1.系统的整体性 2.系统的层次性 3.系统的相关系 4.系统的目的性 5.系统对环境的适应性系统: 模型:模型是对系统的特征要素,有关信息和变化规律的一种抽象表述、它反映 了系统某些本质属性,描述了系统各要素间的相互关系,系统与环境之间的相互 作用。 模型的意义:1.客观实体系统很难做试验,或者根本不能做实验。 2.对象问题虽然可以做试验,但是利用模型更便于理解。 3.模型易于操作,利用模型的参数变化来了解现实问题的本质和规 律更加经济方便。 系统模型的种类:抽象模型和形象模型 抽象模型:数学模型图形模型计算机模型概念模型 形象模型:模拟模型实体模型 建立模型的步骤: 1.弄清问题,掌握实际情况 2.搜集资料 3.确定因素之间的关系 4.构造建模 5.求解模型 6.检验模型的正确性 系统建模预防针的一般方法和步骤(P17) 仿真的发展趋势:建模方法面对对象仿真分布交互仿真人工智能与 计算机仿真虚拟现实仿真 Internet网上仿真 第二章商贸物流系统建模与仿真 商贸流通在社会经济中的地位与作用:1,商贸流通是连接生产和消费的纽带; 2,商贸流通对生产具有反作用; 3,商贸流通是国民经济现代化的支柱。 商贸活动的内容: 1,商流,对象物所有权转移的活动称为商流。 2,物流,是指事物从供给方向需求方的转移。
3,资金流,主要是指资金流的转移过程,包括付款,转账等过程,是 整个商贸活动的目的。 4,信息流,指商品信息的提供,商品促销信息,技术支持,售后服务 等内容,也包括诸如询单价,报单价,付款通知单,转账通知单等商业贸易单证以及交易 方的支付能力和支付信誉。 预测:所谓预测就是人们对某一不确定的或未知事件的表述。 预测的作用:从变化的事物中找出使事物发生变化的变化的固有规律,寻找和研究各种变化现象的背景及其演变的逻辑关系,从而去揭示事物未来的面貌。 判断预测方法:一,部门负责人评判预测法;二,销售人员估计法;三,德尔菲法;四, 历时类比法。 德尔菲法:依靠技术专家小组背靠背景来判断,来代替面对面的会议,是不同专家将分歧的幅度和理由都能够表达出来,经过客观分析以求达到客观规律的一致意见。 时间序列预测技术:一,移动平均预测法(计算题p30例2); 二,指数平均预测法。 DRP:是分销需求计划的简称,它是MRP原理和技术在流通领域中的应用。该技术主要解决分销物资的应用和调度问题,其基本目标是合理进行分销物资和资源配置,以达到既有效 地满足市场需求优势的配置费用最省的目的。 *DRP的基本概念 1.库存:指仓库或物流中心实际存在的物资数量。 2.安全库存:为便于生产经营活动正常进行,防止因需求货供应的波动 引起缺货或停工待料,经常在仓库各项目保持一定数量的计划库存量, 成为安全库存。 3.期初和期末库存:指在论述的时间段开始和结束时本单位的实际库存。 4.进货提前期:指从发出订货到所定货物运回并入库所需要的时间长度。 5.送货提前期:指从接收订单到货物送到用户手中并接收入库的时间长度。 6.在途物资:指供应商已经接受订单备货,但尚未来到本单位入库的物资。 7.订货批量:指一次订货所订的物资数量。 8.时间周期:就是根据实际需要划分的时间段信息,如一日,周,月划分。 9.计划期:是指DRP尽心运算的整个时间段,可能是一个月,一个季度 或一年,他可划分为几个计划周期。 10.物流中心:从事物流活动的具有完善的信息网络的场所或组织。 BOD简介:B OD是MRP中物料清单BOM的概念和结构在分销领域的运用,它同BOM在产品结构树中连接各零件和成品一样,在供应方和各个需求方之间架起了一座沟通的桥梁。 DRP在分销网络中的运作原理(p43DRP原理图)
图书馆管理系统uml建模
基于UML的图书馆管理系统建模设计 一、摘要 面向对象的软件工程,同传统的面向过程的软件工程相比,在需求的获取、系统分析、设计和实现方面都有着很大的区别。UML是OOA和OOD的常用工具。使用UML来构建软件的面向对象的软件工程的过程,就是一个对系统进行不断精化的建模的过程。这些模型包括用例模型、分析模型、设计模型,然后,我们需要使用具体的计算机语言来建立系统的实现模型。当然,在整个软件工程中,我们还需要建立系统的测试模型,以保证软件产品的质量。 使用面向对象的工具来构建系统,就应该使用面向对象的软件工程方法。然而,我们经常会发现,在实际的开发过程中,很多开发人员虽然能够理解UML的所有图形,却仍然不能得心应手的使用UML来构建整个项目,其很大的原因,是仍然在使用原有的软件工程方法,而不清楚如何使用UML来建立系统的这些模型,不清楚分析和设计的区别,以及他们之间的转化。 应用软件系统,就其本质来说,是使用计算机对现实世界进行的数字化模拟。应用软件的制造过程,按照UML的方法,就是建立这一系列模型的过程。关于这个图书馆系统,基本的需求比较简单,就是允许学生可以在图书馆借阅和归还图书,另外,也可以通过网络或者图书馆的终端来查阅和预订书。当然,图书馆管理员也可以对图书进行管理。为了简化系统,我们没有把图书馆中的人员作细分。 本文只是对使用UML的过程做一个探讨,着眼于使用UML进行建模的过程,说明各个层次的模型之间的区别和联系,展示系统演进的过程,而不会深入UML的细节方面。对于更加复杂的系统,其分析和设计的方法是相通的,可以举一反三。 二、图书馆管理系统可行性分析 随着政府机关与广大企事业单位内部网络的广泛建立,在通用信息平台上构筑高效实用的协同工作和自动化办公应用系统,满足信息高度共享和即时发布的需求,有效实现内部知识管理,已成为众多用户的共同需求。 图书管理系统,为政府机关与广大企事业单位自动化办公提供了一个较好的解决方案。在开发过程中,按照软件工程的步骤,从设计到开发采用了面向对象的思想和技术,采用了SQL SERVER 2000数据库,使得本系统可以方便的和其他子系统进行数据交换。同时,注意从软件的图形应用界面上优化软件质量,使得本系统具有很强的可操作性。 三、图书馆管理系统需求分析 3.1、系统目标设计 系统开发的总目标是实现内部图书借阅管理的系统化、规范化和自动化。 能够对图书进行注册登记,也就是将图书的基本信息(如:书的编号、书名、作者、价格等)预先存入数据库中,供以后检索。 能够对借阅人进行注册登记,包括记录借阅人的姓名、编号、班级、年龄、性别、地址、电话等信息。 提供方便的查询方法。如:以书名、作者、出版社、出版时间(确切的时间、时间段、某一时间之前、某一时间之后)等信息进行图书检索,并能反映出图书的借阅情况;以借阅人编号对借阅人信息进行检索;以出版社名称查询出版社联系方式信息。 提供对书籍进行的预先预订的功能。 提供旧书销毁功能,对于淘汰、损坏、丢失的书目可及时对数据库进行修改。
生产系统建模与仿真
《建模与仿真》课程教学大纲 (Modeling and Simulation) 课程编码: 学分:2.5 总学时:40 适用专业:工业工程 先修课程:生产计划与控制、工程统计学、工程数学、运筹学、计算机编程技术 一、课程的性质、目的和任务 《建模与仿真》是面向工程实际的应用型课程,是工业工程系的主导课程之一。学生通过本课程的学习能够初步运用仿真技术来发现生产系统中的关键问题,并通过改进措施的实现,提高生产能力和生产效率。本课程的目的是要求学生通过学习、课堂教育和上机训练,能了解如何运用计算机仿真技术模拟生产系统的布置和调度管理。并熟悉和掌握计算机仿真软件的基本操作和能够实现的功能。使学生了解计算机仿真的基本步骤。结合本课程的特点,使学生掌握或提高系统化分析问题和解决问题的能力,为系统化管理生产打下基础。二、教学基本要求 具体在教学过程中要求学生应该达到: 1.全面了解本课程的性质与任务、框架内容以及理论和方法; 2.掌握仿真的概率统计基础知识。 3.掌握供理论模型建模方法。 4.掌握仿真模型的设计与实现方法。 5.熟练应用建模理论,对排队系统、库存系统、加工制造系统进行建模仿真。 三、教学内容与学时分配 离散事件系统仿真是仿真技术的重要领域,在规划论证、方案评估、计划调度、 加工制造、产品试验、生产培训、训练模拟、管理决策等方面得到广泛应用。本课程 深入地介绍了离散事件系统建模仿真的理论、方法和技术,突出对理论建模方法和计 算机实现技术的讲解,对离散事件系统建模仿真的发展和应用情况做了比较详尽的介 绍。 具体教学内容如下: 第一章绪论 4学时
本章分析了系统和制造系统定义、组成与特点,介绍了系统建模与仿真的基本概念和使用步骤,并给出应用案例。 本章教学目标: 本章教学基本要求: 了解常用术语及常用的仿真软件,了解仿真技术的的发展状况及应用。 理解系统与制造系统的定义及系统建模与仿真的概念及系统、模型与仿真之间的关系。 掌握制造系统建模与仿真的基本概念及基本步骤。 本章教学重点:制造系统建模与仿真的原则及基本步骤。 本章教学难点:制造系统建模与仿真的原则及基本步骤 第一节系统与制造系统 0.3学时 (一)什么是系统 (二)制造系统的组成与特点 第二节系统建模与仿真的基本概念。 0.3学时 (一)系统、模型与仿真的关系 (二)系统建模与仿真技术的特点 第三节制造系统建模与仿真的基本概念。 0.3学时 (一)制造系统建模与仿真的特点分析 (二)制造系统类型及建模元素 (三)制造系统仿真的功能分析 第四节系统建模与仿真的基本步骤 0.4学时 第五节系统建模与仿真的案例分析 0.5学时 (一)连杆生产线的组成与功能分析 (二)连杆生产线仿真模型的构建 (三)仿真逻辑的分析与定义 (四)仿真结果分析及系统优化 第二章系统建模与仿真的基本原理 2学时 本章在分析离散事件系统模型的分类和元素组成的基础上,介绍了建立系统模型的常用方法。 本章教学目标:使学生掌握常用的系统建模方法 本章教学基本要求:
软件建模-图书管理系统
西安科技大学 《软件建模与UM》 实验报告 题目:图书管理系统 学院:计算机科学与技术学院_____________ 专业及班级:软件工程1203班______________ 姓名:____________ 宋小波____________________ 学号:12080103021 _____________________ 日期:2015⑹7
一.实验目 (1) 二.实验内容 (1) 三.系统需求建模 (1) 五.系统静态建模 (3) 5.1系统用例图 (4) 5.2类图 (6) 六.系统动态建模 (8) 6.1状态图 (8) 6.2时序图 (9) 七.系统物理建模 (9) 7.1组件图及部署图 (9) 八.总结 (10)
一、实验目的 了解UML的基本原理和面向对象的分析设计方法,初步掌握Rational Rose 2003建模工具的使 用方法,进一步巩固软件工程的理论知识。 二、实验内容 1、初步掌握Rational Rose 2003开发工具的使用,包括建立用例、活动者、用例图、顺序图、协作图、类图、对象图、包、状态图、活动图、构件图、配置图等。 2、了解面向对象的基本概念,初步掌握Rose环境下用UML进行分析和设计的技术;基本学会在Rose环境下用UML语言为系统建模。 3、为一个图书管理系统的需求分析阶段建立模型。(需求建模) 三.图书管理系统的功能需求: 1、馆员管理:维护馆员信息,有查询、添加、修改、删除功能。馆员身份不同,分别对应不同的操作权限。超级管理员拥有系统维护、数据库维护的权限;一般管理员负责不同的日常工作模块;馆长拥有一切权限。馆员类别划分加强系统安全性。 2、码表维护:维护各种码表,包括:国家码表、语种码表、出版商码表、丛书码表、编辑类型码表、版本码表、图书大小码表。对码可进行添加、修改、删除操作。 3、修改密码:输入当前馆员旧密码、新密码,检查输入完整性,如果旧密码输入不正确,则不能修改。密码录入时以符号(*)显示,密码加密后保存到数据库,以保证数据安全性。 4、编目设定:编目操作过程中,需要设定一定参数,以保证系统正常运行。可以选择设定里的”是否自动产生索书号、流通号"等,如果选择为真,则由系统按一定的算法得出索书号、流通号, 并且保证数据唯一性;如果为假,则由操作馆员录入。虽然系统能自动判断号码的唯一性,但有可能进行多次修改才能保证不重复,增加了数据输入量。保留字段和加载默认值可以在录入信息时,自动加载某些数据,以减少人工录入的工作量。编目设定就是保留这些设定,并且在系统配置文件中保留最近一次设置,下次进入系统时自动加载各项设定。 5、编目管理:编目管理是系统最主要的组成部分之一,主要是维护书目基本信息和部分流通信息。提供图书编目信息的添加、修改功能,以及图书副本的初始流通信息的添加、修改、删除。 6、流通设定:流通操作过程中,需要设定一定参数,以保证系统正常运行。如在"通用设定” 里设定操作方式(快速借还操作[光笔扫描条形码输入卜手工借还操作[键盘输入]),过期罚款、图 书损坏丢失罚款参数,过期催还时间,办卡手续费等,为整个流通操作流程顺利进行提供依据。借 书参数设定实际是读者类型的维护,操作馆员可以根据实际情况设定不同读者类型以及相应的借书等参数。在后继功能模块中,以此判断是否该进行催还、罚款操作。
制造系统建模与仿真在工业工程中的应用 0713020
制造系统建模与仿真在工业工程中的应用0713020 工业工程刘鹏 [摘要]介绍了企业发展和建模的必要性和必然性,分析了制造系统的建模与仿真在优化企业资源中的作用及意义,详细地论述了制造系统的建模与仿真在优化企业资源中的具体应用。 关键词:制造系统;建模与仿真;企业优化;仿真应用 系统建模与仿真技术的含义 系统建模与仿真技术是以相似原理、模型理论、系统技术、信息技术以及建模与仿真应用领域的有关专业技术为基础,以计算机系统、与应用相关的物理效应设备及仿真器为工具,利用模型参与已有或设想的系统进行研究、分析、设计、加工生产、试验、运行、评估、维护、和报废(全生命周期)活动的一门多学科的综合性技术。 仿真科学和技术的通用性和战略性 仿真的通用性表现在一切基础学科(如物理、化学、天文?)都可以通过仿真来研究;并可以极大地提高研究的安全性。仿真的战略性表现在一切复杂巨系统的研究都离不开仿真技术,可以说研究复杂巨系统采用仿真技术是唯一的途径。正如宋健院士所说:“系统仿真是科学实验的利器。 国内仿真技术发展 在我国仿真技术经过半个多世纪的发展,已经从军工走向国民经济。已经从工程走向非工程;已经从确定的小系统走向不确定的复杂巨系统。最初的仿真技术只是用计算机来求解方程,为了实时性,大
都采用电子模拟计算机。现在的仿真技术已经融合了信息技术、网络技术、系统技术、控制技术和高性能的计算技术,以完全崭新的面貌出现在我们的面前。 现在,摆在我们仿真工作者面前的任务是:在虚拟世界与真实世界之间架起一座桥梁;通过仿真技术构筑起一个平台,来勾画出创新型国家的轮廓,例如,国家正投入几个亿,来建设国家级研究经济模型的仿真实验室。 仿真技术,一方面反映了我国仿真技术和仿真技术应用发展的现状,另一方面,又对我国仿真技术今后的发展方向产生了指导作用。近年来,我国仿真技术及其应用的发展是十分迅猛的。仿真技术的发展,使人感到震惊。研究天文、地理、宇宙进化论等等,要依靠仿真,几乎没有哪个领域能离开仿真技术。凡是能写成方程的都要进行仿真。故应鼓励仿真界的科技人员发挥聪明才智,搞好仿真技术。 仿真技术的广度、深度、高度的提高,正反映了我国仿真技术和应用的发展。例如,“面向复杂性地理问题的虚拟研讨厅体系研究”,“复杂系统建模中的几个问题”等都是有代表性的好文章,反映了我国仿真技术已经在军事和国民经济的一些复杂巨系统研究建设中发挥越来越重要的作用。 1、制造系统的建模与仿真在优化企业资源中的作用及意义 计算机仿真技术作为一门高新技术,其方法学建立在计算机能力的基础之上。随着计算机技术的发展,仿真技术也得到迅速的发展,其应用领域及其作用也越来越大。尤其在航空、航天、国防及其他大
物流系统建模与仿真软件简介
一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。
《系统建模与仿真》课程大纲【模板】
《系统建模与仿真》课程大纲 课程名称(中文):系统建模与仿真 课程名称(英文):System Modeling and Simulation 课程编码:Y********C 开课单位:电气**学院 授课对象:硕士研究生 任课教师:王仁明 学时:32 学分:2学期:2 考核方式: 大型作业 先修课程:现代控制理论、数值分析 课程简介: 一、教学目的与基本要求: 本课程是电气信息类硕士研究生的基础学位课。通过本课程学习,掌握建模与仿真的基本方法和技术及其仿真结果分析方法。能熟练地运用这些方法和技术及MATLAB、mathematica 等软件对各类典型的系统进行建模与仿真,并对仿真结果进行有效地分析。了解建模与仿真的学科前沿,包括Agent 的建模方法,Swarm仿真,Petri网建模方法,分布建模与仿真。 二、课程内容与学时分配 1、课程主要内容: 系统建模与仿真的基本概念,方法论和计算机仿真实现技术.包括:系统建模方法论及其发展历史;层次分析法在系统建模中的应用; Matlab/Simulink系统建模与仿真基本原理及应用; 模糊控制系统建模与仿真; 遗传算法系统建模与仿真; 基于Petri网的建模与仿真; Agent 的建模与仿真. 2、课程具体安排: 三、实验、实践环节及习题内容与要求 布置大型作业,进行编程上机仿真. 四、教材及主要参考文献:
1、建模与仿真. 王红卫编著. 2002. 北京:科学出版社 1)系统仿真技术. 黄柯棣等编著. 1998. 长沙:国防科技大学出版社 2)离散事件系统建模与仿真. 顾启泰编著. 1999. 北京:**大学出版社 3)控制系统计算机辅助设计. 薛定宇编著. 2006. 北京:**大学出版社 4)连续系统仿真与离散事件系统仿真. 熊光楞,肖田元,张燕云. 1991. 北京:**大学出版社5)MATLAB7.0/Simulink6.0建模仿真开发与高级工程应用. 黄永安等编著. 2005. 北京:**大学出版社 6)基于MATLAB/Simulink的系统仿真技术与应用. 薛定宇等编著. 2002. 北京:**大学出版社 7)MATLAB 7.0控制系统应用与实例. 刘叔军等编著. 2006. 北京:机械工业出版社 撰写人:XXX 学位分委员会签字: 学院主管研究生教学院长签字:
系统建模与仿真习题答案(forstudents)分解
第一章习题 1-1什么是仿真?它所遵循的基本原则是什么? 答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。 它所遵循的基本原则是相似原理。 1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点? 答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性。 仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法。 1-3数字仿真包括那几个要素?其关系如何? 答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验。 1-4为什么说模拟仿真较数字仿真精度低?其优点如何?。 答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低 但模拟仿真具有如下优点: (1)描述连续的物理系统的动态过程比较自然和逼真。 (2)仿真速度极快,失真小,结果可信度高。 (3)能快速求解微分方程。模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关。 (4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进