高光谱图像分类实验报告

实验报告
姓名专业:学号日期:2015 年12 月22 日
课程名称:高光谱遥感指导教师(学生填写):
成绩:教师签名:
一、实验项目:高光谱遥感图像的分类
二、实验类型(√选):0演示实验;1验证实验;2综合实验;3设计性实验;4创新实验
三、实验目的:利用ENVI软件实现高光谱遥感图像的分类
四、实验准备:电脑一台,ENVI Classic软件,HSI数据
五、实验简要操作步骤及结果:
1、EFFORT Folishing处理。
本次实验所用HIS数据是进行了大气校正等处理后的数据,由于数据光谱曲线呈明显的锯齿状。所以先利用EFFORT Folishing工具进行处理。
1)选择Spectral->EFFORT Folishing
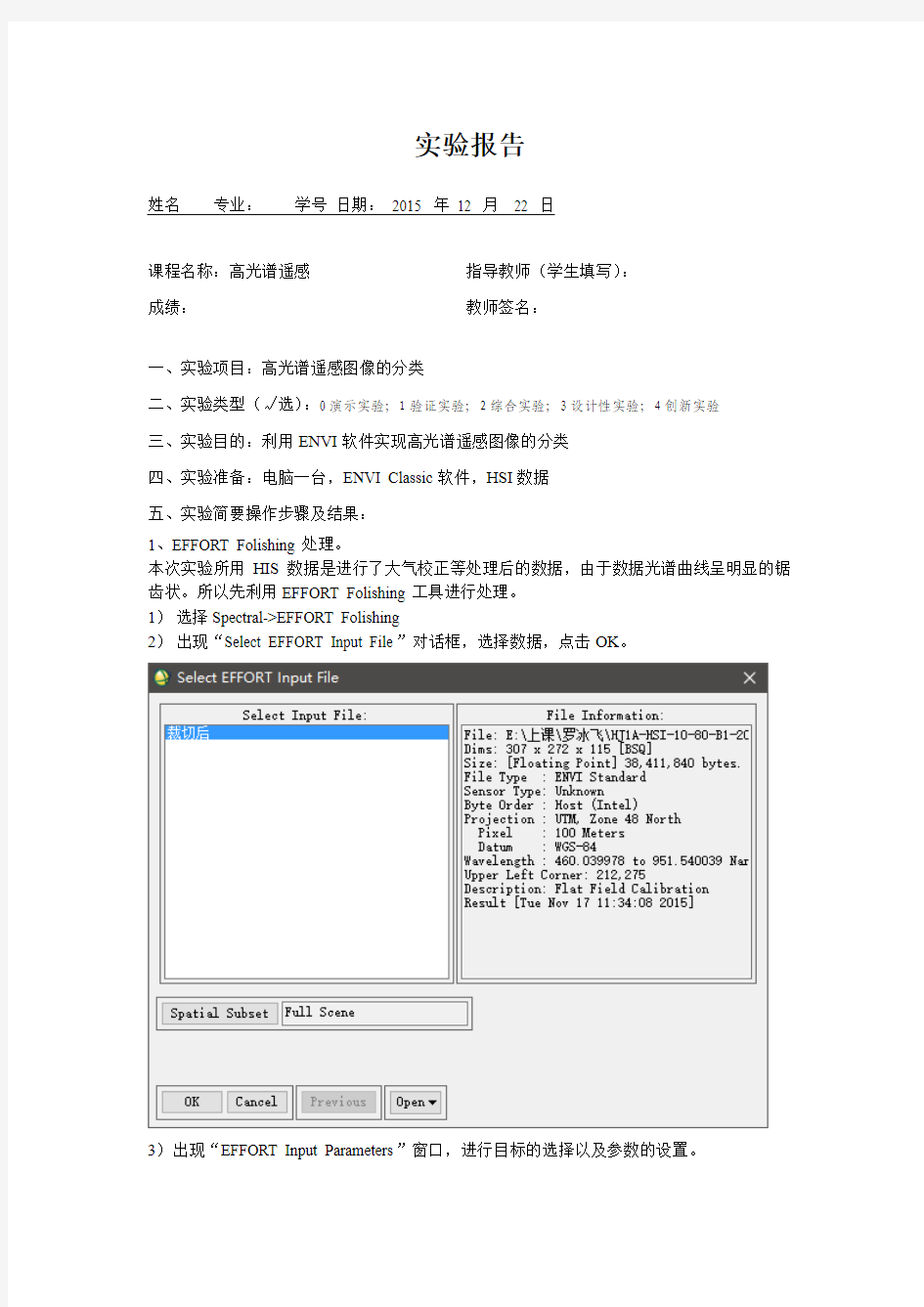
2)出现“Select EFFORT Input File”对话框,选择数据,点击OK。
3)出现“EFFORT Input Parameters”窗口,进行目标的选择以及参数的设置。
处理完成后生成数据Memory1
4)将处理前后同一像元的光谱曲线进行比较
处理前光谱曲线处理后光谱曲线
可以明显看出,经过EFFORT Folishing处理后的数据,其波谱曲线比较平缓,明显的锯齿状消失。
2、Spectral Angle Mapper 光谱角填图
光谱角填图是一种监督分类技术。该算法是将图像波谱直接同参考波谱匹配的一种交互式分类方法,是一种比较图像波谱与地物波谱或波谱库中地物波谱的自动分类方法。
定义示意图
计算公式
1)选择Spectral->Mapping Methods->Spectral Angle Mapper.
2)选择Memory1数据进行处理。出现Endmember Collection:Sam窗口。
3)在#3窗口选择Overlay->Region of Interest.用Zoom视野在图像上选择感兴趣区域(明显的地物类型区域)
4)将选择的区域加载到Endmember Collection:Sam窗口中,在Endmember Collection:Sam 窗口中选择Import->from ROI/EVF from input file.
将所选区域全选,点击OK。
5)点击Apply,出现Spectral Angle Mapper Paramemters对话框。设置参数,选择文件保存位置。
点击OK生成Angle数据。
完成基于Spectral Angle Mapper 方法的遥感图像监督分类。
注:图像中黑色区域即因为该像元比特定的最大角度的弧度阈值更大,导致不能被进行分类。
3、Linear Spectral Unmixing线性混合像元分解
混合像元分解是指从实际光谱数据(一般为多地物光谱混合的数据)中提取各种地物成分(端元)以及各成分所占的比例(丰度)的方法。
Linear Spectral Unmixing可以根据物质的波谱特征,获取多光谱或高光谱图像中物质的丰度信息,即混合像元分解过程。
线性波谱分离结果是一系列端元波谱的灰度图像(丰度图像),图像的像元值表示端元波谱在这个像元波谱中占的比重。比如端元波谱A的丰度图像中一个像元值为0.45,则表示这个像元中端元波谱A占了45%。丰度图像中也可能出现负值和大于1的值,这可能是选择的端元波谱没有明显的特征,或者在分析中缺少一种或者多种端元波谱。
1)选择Spectral-> Mapping Methods->Linear Spectral Unmixing
2)出现Unmixing Input File对话框,选择数据Memory1。
3)出现Endmember Collection:Unmixing对话框,选择Import from ROI/EVF file,将上面进行Spectral Angle Mapper处理ROI所选择的感兴趣区域加载到Endmember Collection:Unmixing对话框中。
选择所有,点击Apply
4)弹出Unmixing Parameters对话框。如果用户想在分解过程中运用限制性条件则用箭头切换按钮选择【Yes】。如果选择了【Yes】,在Weight文本框里输入一个权重。这一权重被添加在分解倒置过程中的联立方程里。权重越大,所进行的分类就越满足设定的限制条件。
5)点击OK开始进行光谱分解。
6)混合光谱分解的结果。光谱分解的结果将以一系列灰度图像的形式出现,每个端元对应一幅丰度图像,并加上一个平方根误差图像。较高的丰度(RMS误差图像的较大误差)对应较亮的像元。
Red
Green
Blue
完成线性混合像元分解,每个端元都有自己的灰度图像。像元亮度越高,说明该像元中这种端元的含量越高。
拉曼光谱
拉曼光谱实验报告 一、实验目的 1. 了解拉曼光谱的基本原理、主要部件的功能; 2. 了解拉曼光谱对所观察与分析样品的要求; 3. 了解拉曼光谱所观察材料的微观组织结构和实际应用; 4. 初步掌握制样技术和观察记录方法 二、实验仪器原理 1928年C.V.拉曼实验发现,当光穿过透明介质被分子散射的光发生频率变化,这一现象称为拉曼散射,同年稍后在苏联和法国也被观察到。在透明介质的散射光谱中,频率与入射光频率υ0相同的成分称为瑞利散射;频率对称分布在υ0两侧的谱线或谱带υ0±υ1即为拉曼光谱,其中频率较小的成分υ0-υ1又称为斯托克斯线,频率较大的成分υ0+υ1又称为反斯托克斯线。靠近瑞利散射线两侧的谱线称为小拉曼光谱;远离瑞利线的两侧出现的谱线称为大拉曼光谱。瑞利散射线的强度只有入射光强度的10-3,拉曼光谱强度大约只有瑞利线的10-3。小拉曼光谱与分子的转动能级有关,大拉曼光谱与分子振动-转动能级有关。拉曼光谱的理论解释是,入射光子与分子发生非弹性散射,分子吸收频率为υ0的光子,发射υ0-υ1的光子(即吸收的能量大于释放的能量),同时分子从低能态跃迁到高能态(斯托克斯线);分子吸收频率为υ0的光子,发射υ0+υ1的光子(即释放的能量大于吸收的能量),同时分子从高能态跃迁到低能态(反斯托克斯线)。分子能级的跃迁仅涉及转动能级,发射的是小拉曼光谱;涉及到振动-转动能级,发射的是大拉曼光谱。与分子红外光谱不同,极性分子和非极性分子都能产生拉曼光谱。激光器的问世,提供了优质高强度单色光,有力推动了拉曼散射的研究及其应用。拉曼光谱的应用范围遍及化学、物理学、生物学和医学等各个领域,对于纯定性分析、高度定量分析和测定分子结构都有很大价值。 拉曼效应起源于分子振动(和点阵振动)与转动,因此从拉曼光谱中可以得到分子振动能级(点阵振动能级)与转动能级结构的知识。用虚的上能级概念可以说明了拉曼效应: 设散射物分子原来处于基电子态,当受到入射光照射时,激发光与此分子的作用引起的极化可以看作为虚的吸收,表述为电子跃迁到虚态(Virtual state),虚能级上的电子立即跃迁到下能级而发光,即为散射光。设仍回到初始的电子态,则有如图所示的三种情况。因而散射光中既有与入射光频率相同的谱线,也有与入射光频率不同的谱线,前者称为瑞利线,后者称为拉曼线。在拉曼线中,又把频率小于入射光频率的谱线称为斯托克斯线,而把频率大于入射光频率的谱线称为反斯托克斯线。
数字图像处理实验报告
数字图像处理实验报告 实验一数字图像基本操作及灰度调整 一、实验目的 1)掌握读、写图像的基本方法。 2)掌握MATLAB语言中图像数据与信息的读取方法。 3)理解图像灰度变换处理在图像增强的作用。 4)掌握绘制灰度直方图的方法,理解灰度直方图的灰度变换及均衡化的方 法。 二、实验内容与要求 1.熟悉MATLAB语言中对图像数据读取,显示等基本函数 特别需要熟悉下列命令:熟悉imread()函数、imwrite()函数、size()函数、Subplot()函数、Figure()函数。 1)将MATLAB目录下work文件夹中的forest.tif图像文件读出.用到imread, imfinfo 等文件,观察一下图像数据,了解一下数字图像在MATLAB中的处理就是处理一个矩阵。将这个图像显示出来(用imshow)。尝试修改map颜色矩阵的值,再将图像显示出来,观察图像颜色的变化。 2)将MATLAB目录下work文件夹中的b747.jpg图像文件读出,用rgb2gray() 将其 转化为灰度图像,记为变量B。 2.图像灰度变换处理在图像增强的作用 读入不同情况的图像,请自己编程和调用Matlab函数用常用灰度变换函数对输入图像进行灰度变换,比较相应的处理效果。 3.绘制图像灰度直方图的方法,对图像进行均衡化处理 请自己编程和调用Matlab函数完成如下实验。 1)显示B的图像及灰度直方图,可以发现其灰度值集中在一段区域,用 imadjust函 数将它的灰度值调整到[0,1]之间,并观察调整后的图像与原图像的差别,调整后的灰
度直方图与原灰度直方图的区别。 2) 对B 进行直方图均衡化处理,试比较与源图的异同。 3) 对B 进行如图所示的分段线形变换处理,试比较与直方图均衡化处理的异同。 图1.1 分段线性变换函数 三、实验原理与算法分析 1. 灰度变换 灰度变换是图像增强的一种重要手段,它常用于改变图象的灰度范围及分布,是图象数字化及图象显示的重要工具。 1) 图像反转 灰度级范围为[0, L-1]的图像反转可由下式获得 r L s --=1 2) 对数运算:有时原图的动态范围太大,超出某些显示设备的允许动态范围, 如直接使用原图,则一部分细节可能丢失。解决的方法是对原图进行灰度压缩,如对数变换: s = c log(1 + r ),c 为常数,r ≥ 0 3) 幂次变换: 0,0,≥≥=γγc cr s 4) 对比拉伸:在实际应用中,为了突出图像中感兴趣的研究对象,常常要求 局部扩展拉伸某一范围的灰度值,或对不同范围的灰度值进行不同的拉伸处理,即分段线性拉伸: 其对应的数学表达式为:
拉曼光谱实验报告
拉曼光谱实验 姓名学号 何婷21530100 李玉环21530092 宋丹21530111 [实验目的] 1、了解Raman光谱的原理和特点; 2、掌握Raman光谱的定性和定量分析方法; 3、了解Raman光谱的谱带指认。 4、了解显微成像Raman光谱。 [仪器和装置] 1、显微Raman光谱系统一套,拉曼光谱仪的型号为SPL-RAMAN-785 USB2000+的拉曼光谱仪,自带785nm激光; 2、带二维步进电机平移台一台(有控制器一台); 3、PT纳米线样品; 4、光谱仪软件SpectraSuite; 5、步进电机驱动软件; 6、摄像头(已与显微镜集成在一起)。 [实验内容] 1、使用显微Raman系统及海洋光谱软件对单根或多根纳米线进行显微Raman光谱测量, 对测量的图和标准图进行比较,并通过文献阅读对PT纳米线Raman(测量和标准)的谱峰进行指认。 2、使用显微拉曼扫描系统进行二维样品表面拉曼信号收集,并生成样品表面特定波长处的 拉曼信号强度三维图,模拟样品表面拉曼表征。选择多个拉曼波长对样品形状进行观察。[实验结果及分析]
观察PbTiO3的拉曼散射谱并比对具体的拉曼散射光谱数据进行分析,可以找到以上10个拉曼散射峰,分别位于784.54nm,794.94 nm,798.60 nm,802.90 nm,806.84 nm,811.91 nm,817.10 nm,825.29 nm,832.44 nm,879.69nm附近,对应的Raman Shift分别是-7.46 cm-1 159.28 cm-1 216.94 cm-1 284.00 cm-1 344.82 cm-1 422.21 cm-1 500.44 cm-1 621.90 cm-1 725.97 cm-1 1371.21 cm-1。 (通过Raman Shift=1/λ入射-1/λ散射计算得到) PT纳米线Raman测量的谱峰指认: 分析可知,-7.46 cm-1 159.28 cm-1 216.94 cm-1 284.00 cm-1 344.82 cm-1 422.21 cm-1 500.44 cm-1 621.90 cm-1 725.97 cm-1附近的9个振动模,分别对应于PbTiO3的A1(1TO),E(1LO),E(2TO),B1+E,A1(2TO),E(2LO)+A1(2LO),E(3TO)A1(3TO),A1(3LO)声子模。 位于159.28 cm-1附近的模对应PbTiO3纳米线表面的TiO6八面体相对于Pb的振动;位于500.44 cm-1附近的模分别对应于表面Ti-O或Pb-O键的振动;位于725.97 cm-1附近的模对应于TiO6八面体中Ti-O键的振动。而位于284.00 cm-1的振动模为静模。此外,在725.97 cm-1处PbTiO3还具有额外的Raman振动模,可能与该相中含有大量且复杂的晶胞结构有关。据报道,复杂钙钛矿结构中氧八面体的畸变或八面体内B位离子的移动在某种程度上会破坏平移对称性,引起相邻晶胞不再具有相似的局部电场和极化率。 位于-7.46 cm-1处的拉曼峰强度增强,相比标准PbTiO3纳米线,其余拉曼峰强度均减弱。798nm处样品表面拉曼信号三维强度图:
高光谱图像分类
《机器学习》课程项目报告 高光谱图像分类 ——基于CNN和ELM 学院信息工程学院 专业电子与通信工程 学号 35 学生姓名曹发贤 同组学生陈惠明、陈涛 硕士导师杨志景 2016 年 11 月
一、项目意义与价值 高光谱遥感技术起源于 20 世纪 80年代初,是在多光谱遥感技术基础之上发展起来的[1]。高光谱遥感能够通过成像光谱仪在可见光、近红外、短波红外、中红外等电磁波谱范围获取近似连续的光谱曲线,将表征地物几何位置关系的空间信息与表征地物属性特征的光谱信息有机地融合在了一起,使得提取地物的细节信息成为可能。随着新型成像光谱仪的光谱分辨率的提高,人们对相关地物的光谱属性特征的了解也不断深入,许多隐藏在狭窄光谱范围内的地物特性逐渐被人们所发现,这些因素大大加速了遥感技术的发展,使高光谱遥感成为 21 世纪遥感技术领域重要的研究方向之一。 在将高光谱数据应用于各领域之前,必须进行必要的数据处理。常用的数据处理技术方法包括:数据降维、目标检测、变化检测等。其中,分类是遥感数据处理中比较重要的环节,分类结果不但直接提取了影像数据有效信息,可以直接运用于实际需求中,同时也是实现各种应用的前提,为后续应用提供有用的数据信息和技术支持,如为目标检测提供先验信息、为解混合提供端元信息等。 相对于多光谱遥感而言,由于高光谱遥感的波谱覆盖范围较宽,因此我们可以根据需要选择特定的波段来突显地物特征,从而能够精确地处理地物的光谱信[2]。目前,许多国家开展大量的科研项目对高光谱遥感进行研究,研制出许多不同类型的成像光谱仪。高光谱遥感正逐步从地面遥感发展到航空遥感和航天遥感,并在地图绘制、资源勘探、农作物监测、精细农业、海洋环境监测等领域发挥重要的作用。
信号与系统实验报告_1(常用信号的分类与观察)
实验一:信号的时域分析 一、实验目的 1.观察常用信号的波形特点及产生方法 2.学会使用示波器对常用波形参数的测量 二、实验仪器 1.信号与系统试验箱一台(型号ZH5004) 2.40MHz双踪示波器一台 3.DDS信号源一台 三、实验原理 对于一个系统特性的研究,其中重要的一个方面是研究它的输入输出关系,即在一特定的输入信号下,系统对应的输出响应信号。因而对信号的研究是对系统研究的出发点,是对系统特性观察的基本手段与方法。在本实验中,将对常用信号和特性进行分析、研究。 信号可以表示为一个或多个变量的函数,在这里仅对一维信号进行研究,自变量为时间。常用信号有:指数信号、正弦信号、指数衰减正弦信号、复指数信号、Sa(t)信号、钟形信号、脉冲信号等。 1、信号:指数信号可表示为f(t)=Ke at。对于不同的a取值,其波形表现为不同的形式,如下图所示: 图1―1 指数信号 2、信号:其表达式为f(t)=Ksin(ωt+θ),其信号的参数:振幅K、角频率ω、与初始相位θ。其波形如下图所示:
图1-2 正弦信号 3、指数衰减正弦信号:其表达式为其波形如下图: 图1-3 指数衰减正弦信号 4、Sa(t)信号:其表达式为:。Sa(t)是一个偶函数,t= ±π,±2π,…,±nπ时,函数值为零。该函数在很多应用场合具有独特的运用。其信号如下图所示:
图1-4 Sa(t)信号 5、钟形信号(高斯函数):其表达式为:其信号如下图所示: 图1-5 钟形信号 6、脉冲信号:其表达式为f(t)=u(t)-u(t-T),其中u(t)为单位阶跃函数。其信号如下图所示: 7、方波信号:信号为周期为T,前T/2期间信号为正电平信号,后T/2期间信号为负电平信号,其信号如下图所示 U(t)
激光拉曼实验报告
激光拉曼及荧光光谱实验 一、实验目的 1、 了解激光拉曼的基本原理和基本知识以及用激光拉曼的方法鉴别物质成分和分子结构的原理; 2、 掌握LRS – II 激光拉曼/荧光光谱仪的系统结构和操作方法; 3、 研究四氯化碳CCL 4、苯C 6H 6等物质典型的振动—转动光谱谱线特征。 二、实验原理 2.1 基本原理 分子有振动。原子分双子的振动按经典力学的观点可以看成是简谐振子,其能量为 A 是振幅,k 是力常数。按照量子力学,简谐振子的能量是量子化的, t=0,1,2,3,···,是振动量子数,f 是振子的固有振动频率。如果在同一电子态中,有振动能级的跃迁,那么产生的光子能量 hf t t E E h )('12-=-=ν 波数为 CO 在红外部分有4.67微米、2.35微米、1.58微米等光谱带,其倒数之比近似为1: 2:3。当Δt=1时,测得的ν ~反映了分子键的强弱。 分子有转动。双原子分子的转动轴是通过质心而垂直于联接二原子核的直线的。按照经典力学,转动的动能是 式中P 是角动量,I是转动惯量, 222211r m r m I += 可以证明 I P I E 2212 2= =ω2 2 2 121r r m m m m I μ=+= 2222 1212 1 kA kx mv E =+ = 2 12 1m m m m m += hf t E )2 1(+=m k f π21= ,3,2,)(1 ~12ωωωωλ ν =?=-'=-= =t c f t t hc E E
上式中r1,r2和r分别代表两原子到转轴的距离及两原子之间的距离,μ称为约化质量。按照量子力学,角动量应等于 代入上式得 此式可以从量子力学直接推得,J称为转动量子数。当J=0,1,2,3,···等值时,相应的J(J+1)=0,2,6,12,···,所以能级的间隔是I h 228π的2,4,6,8,···倍。 实验和理论都证明纯转动能级的跃迁只能在邻近能级之间,就是ΔJ=±1。所得 光谱的波长应该有下式表达的值: 谱线波数(ν ~)的间隔是相等的。HCL 分子远红外吸收谱中,曾观察到很多条吸收线,这些线的波数间隔应该是2B,实验测得:B=10.34厘米 -1 ,所以由此求得 转动惯量I,进而求得HCL 分子中原子之间的核间距这一重要数据。 多原子分子的转动可以近似地看作刚体的转动,这涉及到多个转轴的不同的转动惯量。其谱线结构较为复杂,只有直线型的分子和对称高的分子转动曾研究出一些结果。在分析化学领域中提供了一些分析样品的标准特征谱线可供实验参照。 光通过透明的物体时,有一部分被散射。如果入射光具有线状谱,散射光的光谱中 除有入射光的谱线外,还另有一些较弱的谱线,这些谱线的波数ν '~等于入射光某一波数0~ν加或减一个数值,即10~~~ννν±='。新出现谱线的波数与入射光的波数之差发现与光源无关,只决定于散射物。如果换一个光源,0~ν不同了,但如果散射物不变换,那么0~~νν-'还是等于原来的1~ν,散射光的波数变动反映了散射物的性质。由于散射光的波数等于入射光的波数与另一数值1 ~ν组合的数值,所以这样的散射称作组合散射。 可以在紫外或可见区观测分子的振动和转动能级,通过选择波长在可见光波段的激 ,2,1,0,2) 1(=+=J h J J P π ) 1(82 2+= J J I h E πIc h B J BJ J J J J Ic h hc E E 2''''2'8, ,3,2,12)]1()1([8~1 ππνλ= ==+-+=-==
遥感图像处理 分类 实验报告
Lab6 non-parametric classification and post classification 12021005龚鑫烨Objection:the major object of the current lab section are to implement non-parametric classification based on BP networks and support vector machines algorithms,with a full mastery of post-classification operation. Data: the subset of spot 5 imagery covering NJ. Steps: 1、identify a training dataset and an independent set of validation data for built-up, forest,cropland,grassland and water. 2、Implementing above-mentioned non-parametric algorithms to classify your image. 3、Validating your classification. 4、Refining your classification by implementing the majority filtering and modeling process if possible. 实验步骤: 1、将数据加载到envi中
建立光谱库实验报告
实验报告 姓名专业:学号:日期:2015 年12 月15 日 课程名称:指导教师(学生填写): 成绩:教师签名: 一、实验项目:建立光谱库 二、实验类型(√选):0演示实验;1验证实验;2综合实验;3设计性实验;4创新实验 三、实验目的:利用ENVI软件建立光谱库。 四、实验准备:电脑一台,ENVI软件,ViewSpec Pro软件,采集的地物光谱数据,HSI数 据。 五、实验简要操作步骤及结果: 1、数据准备 1)ASD数据的处理。利用ViewSpec Pro软件将所采集的地物光谱数据进行平均运算,以降低误差。将每种地物所求的平均光谱曲线作为光谱库建立的数据源。 2)加载高光谱图像在图像中选择典型的地物类型区域,选中区域作为光谱库建立的数据源。3)利用实验四中所提取的波谱端元座位光谱库建立的数据源 2、建立光谱库。 1)选择Spectral->Spectral Library->Spectral Library Buider. 2)出现“Spectral Library Builder”对话框时,从“Data File” (ENVI 图像文件)或ASCII File”、或“File Input Spectrum”,为新库选择数据源。 (1)当采用“Data File”,波长和FWHM 值(若存在)从ENVI 头文件中读取。 (2)当采用“ASCII File”, 必须选上包含波长值与FWHM (若存在)的列。 (3)当采用“file input spectrum”时直接弹出Spectral Library Builder 对话框。 3)点击【OK】。出现“Spectral Library Builder”对话框,允许选择光谱库
激光拉曼光谱实验报告
激光拉曼光谱实验报告 摘要:本实验研究了用半导体激光器泵浦的3Nd + :4YVO 晶体并倍频后得到的532nm 激 光作为激发光源照射液体样品的4CCL 分子而得到的拉曼光谱,谱线很好地吻合了理论分析的4CCL 分子4种振动模式,且频率的实验值与标准值比误差低于2%。又利用偏振片及半波片获得与入射光偏振方向垂直及平行的出射光,确定了各振动的退偏度,分别为、、、,和标准值0和比较偏大。 关键词:拉曼散射、分子振动、退偏 一, 引言 1928年,印度物理学家拉曼()和克利希南()实验发现,当光穿过液体苯时被分子散射的光发生频率变化,这种现象称为拉曼散射。几乎与此同时,苏联物理学家兰斯别而格()和曼杰尔斯达姆()也在晶体石英样品中发现了类似现象。在散射光谱中,频率与入射光频率0υ相同的成分称为瑞利散射,频率对称分布在0υ两侧的谱线或谱带01υυ±即为拉曼光谱,其中频率较小的成分01υυ-又称为斯托克斯线,频率较大的成分01υυ+又称为反斯托克斯线。这种新的散射谱线与散射体中分子的震动和转动,或晶格的振动等有关。 拉曼效应是单色光与分子或晶体物质作用时产生的一种非弹性散射现象。拉曼谱线的数目,位移的大小,谱线的长度直接与试样分子振动或转动能级有关。因此,与红外吸收光谱类似,对拉曼光谱的研究,也可以得到有关分子振动或转动的信息。目前拉曼光谱分析技术已广泛应用于物质的鉴定,分子结构的研究谱线特征。 20世纪60年代激光的问世促进了拉曼光谱学的发展。由于激光极高的单色亮度,它很快被用到拉曼光谱中作为激发光源。而且基于新激光技术在拉曼光谱学中的使用,发展了共振拉曼、受激拉曼散射和番斯托克斯拉曼散射等新的实验技术和手段。 拉曼光谱分析技术是以拉曼效应为基础建立起来的分子结构表征技术,其信号来源于分子的振动和转动。它提供快速、简单、可重复、且更重要的是无损伤的定性定量分析,无需样品准备,样品可直接通过光纤探头或者通过玻璃、石英、和光纤测量。拉曼光谱的分析方向有定性分析、结构分析和定量分析。
ENVI实验报告
一、实验目的 ENVI是一套功能齐全的遥感图像处理系统,是处理、分析并显示多光谱数据、高光谱数据 和雷达数据的高级工具。此次实习主要是学习一些关于ENVI的基本操作,如:图像预处理,影像分析,图像增强,几何校正,监督分类以及专题制图等步骤。 二、实验数据 ELEVATION_SOURCE = "GLS2000" EPHEMERIS_TYPE = "DEFINITIVE" SPACECRAFT_ID = "Landsat7" SENSOR_ID = "ETM+" SENSOR_MODE = "SAM" ACQUISITION_DATE = 2000-09-24 WRS_PATH = 144 三、实验内容 1.遥感数据下载 2.数据格式转化及多波段的合成 3.图像边框的裁剪 4.图像的镶嵌 6.图像几何校正 7.裁剪 8.监督分类 9.专题出图 四、实验步骤 1.遥感数据下载 输入地名及日期,搜索符合自己通途的数据,查看并下载
2.数据格式转化及多波段的合成 由于下载图像的格式tif格式,需要转成img格式。并将单波段融合成为多波段,这一步在erdas中完成。 tif转img 单波段融合成多波段 3.图像边框的裁剪 通过主图像窗口-tools-region?of?interest-roi?tool,然后自己在图像上定义出一块感兴趣区(实际中难于确定严格准确的裁剪界限)。 4.图像的镶嵌 Map→mosaicking→georeferenced 启动镶嵌模板 6.图像几何校正 设置参数,参数在原始数据中的txt中可以查看 启动校正模块,并利用google地球进行校正 7.裁剪 分别打开需要裁剪的图像和所在区域的shapefile文件 将矢量文件转成ROI 利用ROI裁剪图像 选择主菜单→basic tools→subset data via ROIS,选择裁剪图像 在spatial subset via ROI parameters中,选择由矢量生成的
激光拉曼光谱仪实验报告
实验六 激光拉曼光谱仪 【目的要求】 1.学习和了解拉曼散射的基本原理; 2.学习使用激光拉曼光谱仪测量CCL 4的谱线; 【仪器用具】 LRS-3型激光拉曼光谱仪、CCL 4、计算机、打印机 【原 理】 1. 拉曼散射 当平行光投射于气体、液体或透明晶体的样品上,大部分按原来的方向透射 而过,小部分按照不同的角度散射开来,这种现象称为光的散射。散射是光子与物质分子相互碰撞的结果。由于碰撞方式不同,光子和分子之间会有多种散射形式。 ⑴ 弹性碰撞 弹性碰撞是光子和分子之间没有能量交换,只是改变了光子的运动方向,使得散射光的频率与入射光的频率基本相同,频率变化小于3×105HZ ,在光谱上称为瑞利散射。瑞利散射在光谱上给出了一条与入射光的频率相同的很强的散射谱线,就是瑞利线。 ⑵ 非弹性碰撞 光子和分子之间在碰撞时发生了能量交换,这不仅使光子改变了其运动方向,也改变了其能量,使散射光频率与入射光频率不同,这种散射在光谱上称为拉曼散射,强度很弱,大约只有入射线的10-6。 由于散射线的强度很低,所以为了排除入射光的干扰,拉曼散射一般在入射线的垂直方向检测。散射谱线的排列方式是围绕瑞利线而对称的。在拉曼散射中散射光频率小于入射光频率的散射线被称为斯托克斯线;而散射光频率大于入射光频率的散射线被称为反斯托克斯线。斯托克斯线和反斯托克斯线是如何形成的呢?在非弹性碰撞过程中,光子与分子有能量交换, 光子转移一部分能量给分子, 或者从分子中吸收一部分能量,从而使它的频率改变,它取自或给予散射分子的能量只能是分子两定态之间的差值21E E E -=?。在光子与分子发生非弹性碰撞过程中,光子把一部分能量交给分子时,光子则以较小的频率散射出去,称为频率较低的光(即斯托克斯线),散射分子接受的能量转变成为分子的振动或转动能
遥感非监督分类实验报告书
遥感非监督分类实验报告书 部门: xxx 时间: xxx 整理范文,仅供参考,可下载自行编辑
遥感图像的非监督分类实验报告 姓名:李全意 专业班级:地科二班 学号:2018214310 指导教师:段艳 日期:2018年6月3日 1. 实验目的 通过本实验加强对遥感非监督分类处理理论部分的理解,熟练掌握图像非监督分类的处理方法,并将处理前后数据进行比较。 b5E2RGbCAP 2. 实验准备工作 <1)准备遥感数据<本实验使用的是老师提供的遥感数据); <2)熟悉遥感图像非监督分类的理论部分 3.实验步骤 4. 实验数据分析与结论 <1)通过分类前后图像的比较,发现非监督分类后的图像容易区分不同地物; <2)分类过程中存在较多错分漏分现象,同种类别中有多种地物; <3)非监督分类根据地物的光谱统计特性进行分类,客观真实且方法简单,而且具有一定的精度。 5. 实验收获及需要解决的问题 <1)对非监督分类处理遥感图像方法有了总体上的认识,基本上掌握该方法的具体操作步骤,会用该方法处理一些遥感图图像。 p1EanqFDPw
Unsupervised Classification, 在Unsupervised Classification对话框中,将参数设计设计如下: Number of classes:30,一般将分类数取为最终分类数的2倍以上;Maximum Iterations:18; 点击Color Scheme Options决定输出的分类图像为黑白的;Convergence Threshold:0.95。 点击OK即可。打开完成后图像与原图像对比: 原图:完成后: <2)打开原图像,在视窗中点击File/Open/Raster Layer,选择分类监督后的图像classification1.img,在Raster Options中,取消Clear Display如下:
高光谱实验报告三
实验三(数据处理) 姓名:郜庆科学号:2012303200109 一、实验过程(描述实验的主要步骤,列出主要方法) 【1】、回归分析 利用Excel中自带的回归分析工具对数据进行回归分析,得到结果如表所示: 回归统计 Multiple R 0.999999 R Square 0.999998 Adjusted R Square 0.999996 标准误差 1.59E-05 观测值20 方差分析 df SS MS F Significance F 回归分析7 0.001234 0.000176 695553.4 1.12E-32 残差12 3.04E-09 2.53E-10 总计19 0.001234 Coefficients 标准误差t Stat P-value Lower 95% Upper 95% 下限 95.0% 上限 95.0%
Intercept 0.000105 8.39E-05 1.249767 0.23521 -7.8E-05 0.000288 -7.8E-05 0.000288 X Variable 1 -2E-06 1.82E-06 -1.11978 0.284721 -6E-06 1.93E-06 -6E-06 1.93E-06 X Variable 2 -5.43968 0.149242 -36.4486 1.17E-13 -5.76485 -5.1145 -5.76485 -5.1145 X Variable 3 30.00856 0.835847 35.90199 1.39E-13 28.18741 31.82972 28.18741 31.82972 X Variable 4 -67.1698 1.881489 -35.7003 1.49E-13 -71.2692 -63.0704 -71.2692 -63.0704 X Variable 5 77.08559 2.136489 36.08049 1.32E-13 72.43058 81.7406 72.43058 81.7406 X Variable 6 -46.8141 1.298246 -36.0595 1.32E-13 -49.6427 -43.9854 -49.6427 -43.9854 X Variable 7 13.32797 0.35499 37.54468 8.19E-14 12.55451 14.10143 12.55451 14.10143 从回归统计表中可以得到其相关系数R值为0.999999,所以表明自变量与因变量之间有很大的相关性。R平方为复决定系数,上述复相关系数R的平方。用来说明自变量解释因变量y 变差的程度,以说明因变量y的拟合效果。此案例中的复决定系数为0.99998,表明用用自变 量可解释因变量变差的99.98%,该值越大,模型拟合效果很好。调整后的复决定系数R2,该 值为0.999996,说明自变量能说明因变量y的99.99%,因变量y的0.0001%要由其他因素来 解释。 方差分析表中的Significance F(F显著性统计量)的P值为1.12E-32,明显小于显著性水平 0.05,所以说该回归方程回归效果显著,方程中至少有一个回归系数显著不为0。 在回归参数表中,可以得到各个X的回归系数和相关性等。 【2】、使用Excel的作图功能绘制冠层的光谱曲线,波长作为x轴,反射率作为y轴。
拉曼光谱实验报告
成绩 评定 教师 签名 嘉应学院物理学院近代物理实验 实验报告 实验项目:拉曼光谱 实验地点: 班级: 姓名: 座号: 实验时间:年月日
图2 ν? 0ν ν? 斯托克斯线 瑞利线 反斯托克斯线 一、实验目的: 1、 了解拉曼散射的基本原理 2、 学习使用拉曼光谱仪测量物质的谱线,知道简单的谱线分析方法。 二、实验仪器和用具: RBD 型激光拉曼光谱仪 三、实验原理: 按散射光相对于入射光波数的改变情况,可将散射光分为瑞利散射、布利源散射、拉曼散射;其中瑞利散射最强,拉曼散射最弱。在经典理论中,拉曼散射可以看作入射光的电磁波使原子或分子电极化以后所产生的,因为原子和分子都是可以极化的,因而产生瑞利散射,因为极化率又随着分子内部的运动(转动、振动等)而变化,所以产生拉曼散射。 在量子理论中,把拉曼散射看作光量子与分子相碰撞时产生的非弹性碰撞过程。在弹性碰撞过程中,光量子与分子均没有能量交换,于是它的频率保持恒定,这叫瑞利散射,如图(1a );在非弹性碰撞过程中光量子与分子有能量交换,从而使它的频率改变,它取自或给予散射分子的能量只能是分子两定态之间的差值12E E E ?=-,当光量子把一部分能量交给分子时,频率较低的光为斯托克斯线,散射分子接受的能量转变成为分子的振动或转动能量,从而处于激发态1E ,如图(1b ),这时的光量子的频率为0ννν'=-?;光量子从较大的频率散射,称为反斯托克斯线,这时的光量子的频率为0ννν'=+?。 最简单的拉曼光谱如图2所示,中央的是瑞利散射线,频率为0ν,强度最强;低频一侧的是斯托克斯线,强度比瑞利线的强度弱很多;高频的一侧是反斯托克斯线,强度比斯托克斯线的 图(1a ) 0h ν ()0h νν+? 0h ν ()0h νν-? 图(1b ) (上能态是虚能态,实 际不存在。这样的跃迁 过程只是一种模型实 际并没有发生) 0h ν 0h ν 0h ν 0h ν
高光谱图像分类讲解学习
高光谱图像分类
《机器学习》课程项目报告 高光谱图像分类 ——基于CNN和ELM 学院信息工程学院 专业电子与通信工程 学号 2111603035 学生姓名曹发贤 同组学生陈惠明、陈涛 硕士导师杨志景 2016 年 11 月
一、项目意义与价值 高光谱遥感技术起源于 20 世纪 80年代初,是在多光谱遥感技术基础之上发展起来的[1]。高光谱遥感能够通过成像光谱仪在可见光、近红外、短波红外、中红外等电磁波谱范围获取近似连续的光谱曲线,将表征地物几何位置关系的空间信息与表征地物属性特征的光谱信息有机地融合在了一起,使得提取地物的细节信息成为可能。随着新型成像光谱仪的光谱分辨率的提高,人们对相关地物的光谱属性特征的了解也不断深入,许多隐藏在狭窄光谱范围内的地物特性逐渐被人们所发现,这些因素大大加速了遥感技术的发展,使高光谱遥感成为21 世纪遥感技术领域重要的研究方向之一。 在将高光谱数据应用于各领域之前,必须进行必要的数据处理。常用的数据处理技术方法包括:数据降维、目标检测、变化检测等。其中,分类是遥感数据处理中比较重要的环节,分类结果不但直接提取了影像数据有效信息,可以直接运用于实际需求中,同时也是实现各种应用的前提,为后续应用提供有用的数据信息和技术支持,如为目标检测提供先验信息、为解混合提供端元信息等。 相对于多光谱遥感而言,由于高光谱遥感的波谱覆盖范围较宽,因此我们可以根据需要选择特定的波段来突显地物特征,从而能够精确地处理地物的光谱信[2]。目前,许多国家开展大量的科研项目对高光谱遥感进行研究,研制出许多不同类型的成像光谱仪。高光谱遥感正逐步从地面遥感发展到航空遥感和航天遥感,并在地图绘制、资源勘探、农作物监测、精细农业、海洋环境监测等领域发挥重要的作用。高光谱遥感技术虽然是遥感领域的新技术,但是高光谱图像的分类一直制约着高光谱遥感的应用[3,4],因此对其进行研究显得尤为重要。 高光谱遥感图像较高的光谱分辨率给传统的图像分类识别算法提出严峻的挑战。波段维数的增加不仅加重了数据的存储与传输的负担,同时也加剧了数据处理过程的复杂性,并且由于波段与波段间存在着大量的冗余信息,从而使得传统图像分类算法并不适用于高光谱遥感图像的分类。传统
图像编码实验报告
图 像 压 缩 编 码(实验报告)
一、实验目的 1.理解图像压缩目的及意义; 2.理解有损压缩和无损压缩的概念; 3.了解几种常用的图像压缩编码方法; 4.利用MATLAB程序进行图像压缩。 二、实验原理 图像压缩主要目的是为了节省存储空间,提高存储、处理、传输速度。虽然表示图像需要大量的数据,但数据是高度相关的,或者说存在冗余(Redundancy),去掉这些冗余信息可以有效地压缩图像,同时不会损坏图像的有效信息。信息的冗余量有许多种,如空间冗余,时间冗余,结构冗余,知识冗余,视觉冗余等,数据压缩实质上是减少这些冗余量。高效编码的主要方法是尽可能去除图像中的冗余成分,从而以最小的码元包含最大的图像信息。 图像压缩的理想标准是信息丢失最少,压缩比例最大。不损失图像质量的压缩称为无损压缩,无损压缩不可能达到很高的压缩比;损失图像质量的压缩称为有损压缩,高的压缩比是以牺牲图像质量为代价的。压缩的实现方法是对图像重新进行编码,希望用更少的数据表示图像。 编码压缩方法有许多种,从不同的角度出发有不同的分类方法,从信息论角度出发可分为两大类。 (1)冗余度压缩方法,也称无损压缩、信息保持编码或嫡编码。具体说就是解码图像和压缩编码前的图像严格相同,没有失真,从数学上讲是一种可逆运算。 (2)信息量压缩方法,也称有损压缩、失真度编码或烟压缩编码。也就是说解码图像和原始图像是有差别的,允许有一定的失真。 应用在多媒体中的图像压缩编码方法,从压缩编码算法原理上可以分为以下几类: (1)熵编码。熵编码是纯粹基于信号统计特性的编码技术,是一种无损编码。熵编码的基本原理是给出现概率较大的符号赋予一个短码字,而给出现概率较小的符号赋予一个长码字,从而使得最终的平均码长很小。
三、高光谱遥感图像辐射与几何校正
三、高光谱遥感图像辐射与几何校正 ZB/HRS/IRSA/CAS 2007 3.1 成像光谱仪定标3.2 大气辐射传输理论 3.3 高光谱遥感图像大气辐射校正3.4 高光谱遥感图像几何纠正 张兵 中国科学院遥感应用研究所E-mail: zb@https://www.360docs.net/doc/ae7545190.html, 3.1 成像光谱仪定标 辐射定标:相对定标和绝对定标 (1)相对辐射定标就是为了校正遥感器中各个探测器元件响应度差异而对卫星遥感器测量到的原始数字计数值进行归一化的一种处理工作; (2)绝对辐射定标是通过各种标准辐射源,在不同波谱段建立成像光谱仪入瞳处的光谱辐射亮度值与成像光谱仪输出的数字量化值之间的定量关系。 相对辐射定标: 利用星上定标数据或者图像统计数据计算遥感器的每个探测器的增益和偏移量。 i i i raw i cal NG B DN DN ?= __i cal DN _相对定标后的探测元件数字计数值;原始探测元件采集的数字计数值; 第i个探测元件归一化后的偏移量,也就是暗电流,单位DN ;第i个探测元件归一化后的增益,其值通常接近1,单位DN 。 i raw DN _i B i NG 3.1 成像光谱仪定标基于图像的相对辐射定标 i σR σ直方图均衡法:对摆扫型遥感器,用每个探测器的标准差和所有波段(或者参考探测器)平均标准差来计算增益,即: ∑== =N j j R R i i N NG 1 1/σ σσσR μ每个探测器采集到的数据的平均值和参考探测器采集到的数据或者所有波段数据的平均值来计算偏置量,即: i μR R i i i B σμσμ? =3.1 成像光谱仪定标
均匀场景法:是用全图像DN 均值来计算增益系数。设第 i 个探测元的DN 值的列平均值为Q i ,则相对增益和Q i 之间存在下面的关系: i NG ∑==N j j i i Q N Q NG 1 1/ 其中N 是一排探测元的总数。 直方图匹配法:分别计算每个探测器的直方图和参考探测器的直方图,把所有探测器的均值作为参考探测器的响应输出,然后将每个探测器的直方图匹配到参考探测器的直方图上。 R R i i i B σμσμ? =成像光谱仪的绝对辐射定标: 建立成像光谱仪每个探测元件输出的数字量化值与它所对应视场中输出辐射亮度值之间的定量关系。辐射定标的三种主要方式: (1)仪器实验室定标(In-lab calibration ) 成像光谱仪的实验室内光谱定标用于确定系统各个波段的光谱响应函数;实验室内辐射定标用于确定系统各个波段对辐射量的响应能力。 (2)机上或星上定标(On-board calibration ) 机上或星上实时定标用于波段的漂移和系统辐射响应率的变化检测。 (3)野外场地定标(On -site Calibration ) 选择定标辐射场地,通过地面同步测量对遥感器定标。 3.1 成像光谱仪定标实验室光谱定标 (1) 单色仪全波长范围定标: 以低压汞灯及氪灯的发射谱线为标准;(2) 使单色仪以一定的步长扫描输出单色光,检测遥感器各通道 记录信号的波长位置、光谱响应函数; (3) 确定遥感器每个通道的波长位置、光谱响应函数等。 实验室辐射定标 绝对辐射定标采用积分球作为光源照射传感器的整个视场,根据成像光谱仪的动态范围,改变标准辐射源的辐射亮度输出级别,逐波段建立辐射亮度输入值与遥感器输出DN值的关系。 3.1 成像光谱仪定标 ) ,(),(),()(i j i j i j i j b DN a L +×=λ式中, 是第i波段第j组辐射亮度输入值; 是第i波段第j组图像灰度输出值; ,是第i波段第j组辐射定标系数。 )(i j L λij DN ),(i j a ),(i j b
拉曼光谱实验报告
嘉应学院物理学院近代物理实验 实验报告 实验项目:拉曼光谱 实验地点: 班级: 姓名: 座号:
实验时间:年月日 一、实验目的: 1、了解拉曼散射的基本原理 2、学习使用拉曼光谱仪测量物质的谱线,知道简单的谱线分析方法。 二、实验仪器和用具: RBD型激光拉曼光谱仪 三、实验原理: 按散射光相对于入射光波数的改变情况,可将散射光分为瑞利散射、布利源散射、拉曼散射;其利散射最强,拉曼散射最弱。在经典理论中,拉曼散射可以看作入射光的电磁波使原子或分子电极化以后所产生的,因为原子和分子都是可以极化的,因而产生瑞利散射,因为极化率又随着分子部的运动(转动、振动等)而变化,所以产生拉曼散射。 在量子理论中,把拉曼散射看作光量子与分子相碰撞时产生的非弹性碰撞过程。在弹性碰撞过程中,光量子与分子均没有能量交换,于是它的频率保持恒定,这叫瑞利散射,如图(1a);在非弹性碰撞过程中光量子与分子有能量交换,从而使它的频率改变,它取自或给
图2 ν?0νν? 斯托克斯线瑞利线反斯托克斯线予散射分子的能量只能是分子两定态之间的差值 12 E E E ?=-,当光量子把一部分能量交 给分子时,频率较低的光为斯托克斯线,散射分子接受的能量转变成为分子的振动或转动能 量,从而处于激发态 1 E,如图(1b),这时的光量子的频率为 ννν '=-?;光量子从较大 的频率散射,称为反斯托克斯线,这时的光量子的频率为 ννν '=+?。 最简单的拉曼光谱如图2所示,中央的是瑞 利散射线,频率为 ν,强度最强;低频一侧的 是斯托克斯线,强度比瑞利线的强度弱很多;高 频的一侧是反斯托克斯线,强度比斯托克斯线的 强度又要弱很多,因此并不容易观察到反斯托克 斯线的出现,但反斯托克斯线的强度随着温度的升高而迅速增大。斯托克斯线和反斯托克斯 线通常称为拉曼线,其频率常表示为 νν ±?,ν?称为拉曼频移。为尽可能地考虑增强入射光的光强和最大限度地收集散射光,又要尽量地抑制和消除主要来自瑞利散射的背景杂散光,提高仪器的信噪比。拉曼光谱仪一般由图3所示的五个部分构成。 仪器的外形示意图见图5所示。仪器配套实验台,各分部件安装于实验台上,实验台结实平稳,满足精度光学实验的要求。 图3 拉曼光谱仪的基本结构
ENVI实验报告
实验报告 课程名称:系部名称:测绘工程学院专业班级:遥感科学与技术11-1班学生姓名:学号:指导教师:田静 实验报告1 实验报告2 篇二:envi上机报告 《遥感软件应用与开发》 实验指导书、作业 系部名称:测绘工程学院 专业班级:遥感科学与技术11-1班 学生姓名: 学号: 指导教师:田静 测绘工程学院 目录 《遥感软件应用与开发》课程实验指导书错误!未定义书签。 实验一:envi软件安装与基本功能操作3 实验二:影像的地理坐标定位和校正19 实验三:图像融合、图像镶嵌、图像裁剪 25 实验四:图像分类 31 实验报告: 37 实验报告1: 38 实验报告2: 41 实验报告3: 44 实验报告4: 47 实验一:envi软件安装与基本功能操作 一、实验目的 熟悉遥感数据图像处理软件envi的安装过程,了解envi基本信息、基本概念及其主要特性。对envi操作界面有一个基本的熟悉,对各菜单功能有一个初步了解,为后面的实验作好准备。 二、实验学时 2学时 三、实验类型 实践 四、实验原理及内容 (1)遥感图像处理软件envi界面总体介绍 (2)envi软件能识别的图像类型介绍 (3)各种图像文件的打开 重点: envi能识别的文件类型 学生可自行阅读帮助文件学习。 五、实验步骤 1.envi的安装 2.遥感图像处理软件envi界面介绍 启动envi后,出现主菜单条,一共12项 file:文件操作。支持众多的卫星和航空传感器。支持80多种图像以及矢 量数据格式的输入,支持多种格式图像文件的直接输入。可输 出的格式包括:栅格格式和矢量格式。 basic tools:基本图像工具。提供了多种envi功能的入口。这些功能对于