乐迪SU04_超声波模块使用说明书
SU04定高避障模块
前言:
SU04是个超声波收发一体的测距模块,用于Pixhawk飞控的全向避障和定高。模块可以实现pixhawk水平8个方向的避障、向上防撞、向下的定高等功能。模块的测距范围为40cm~450cm。
功能一:避障
1.固件支持
避障功能需要固件版本大于或等于3.5版本!!!
2.安装模块
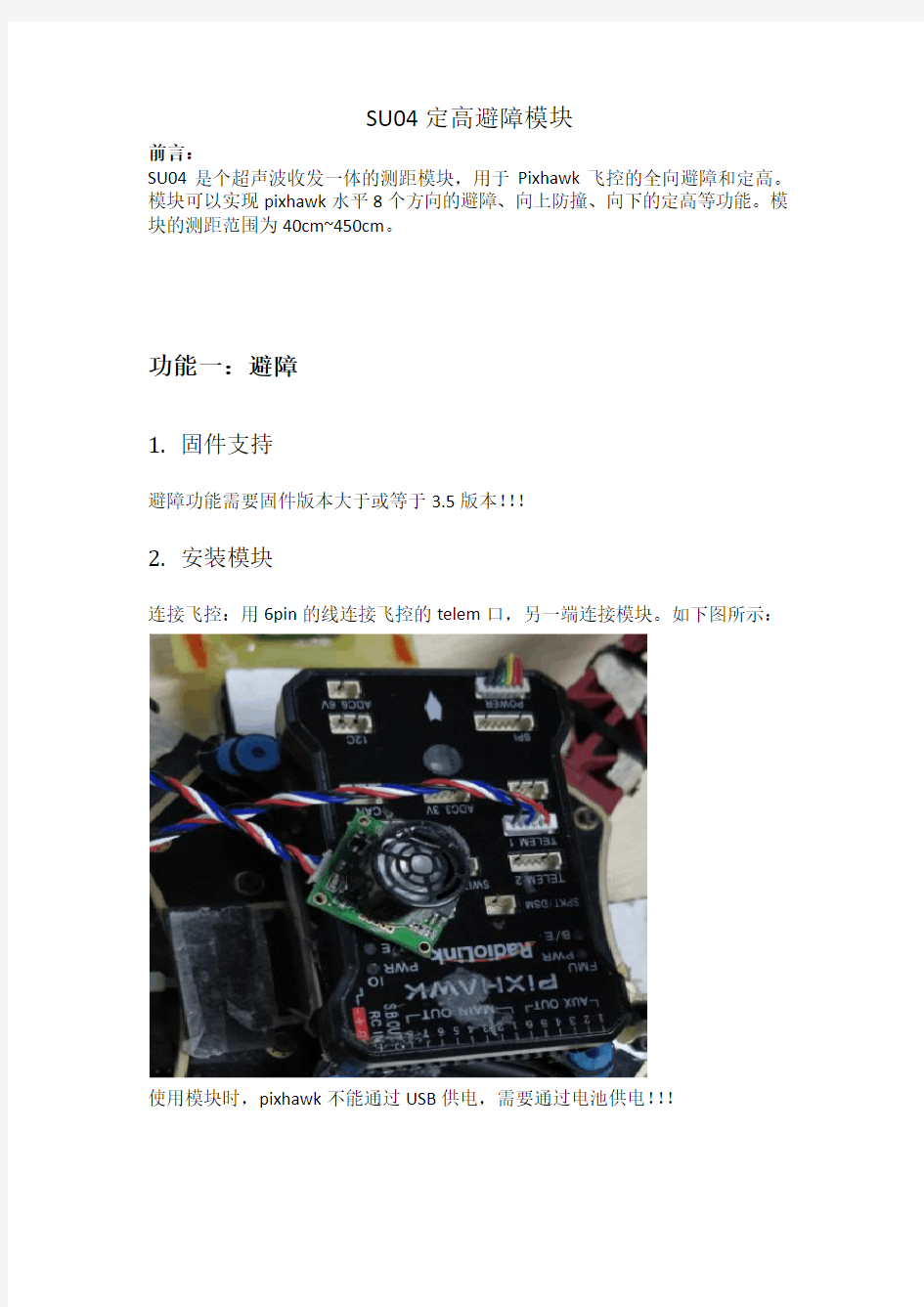
连接飞控:用6pin的线连接飞控的telem口,另一端连接模块。如下图所示:
使用模块时,pixhawk不能通过USB供电,需要通过电池供电!!!
3.配置说明
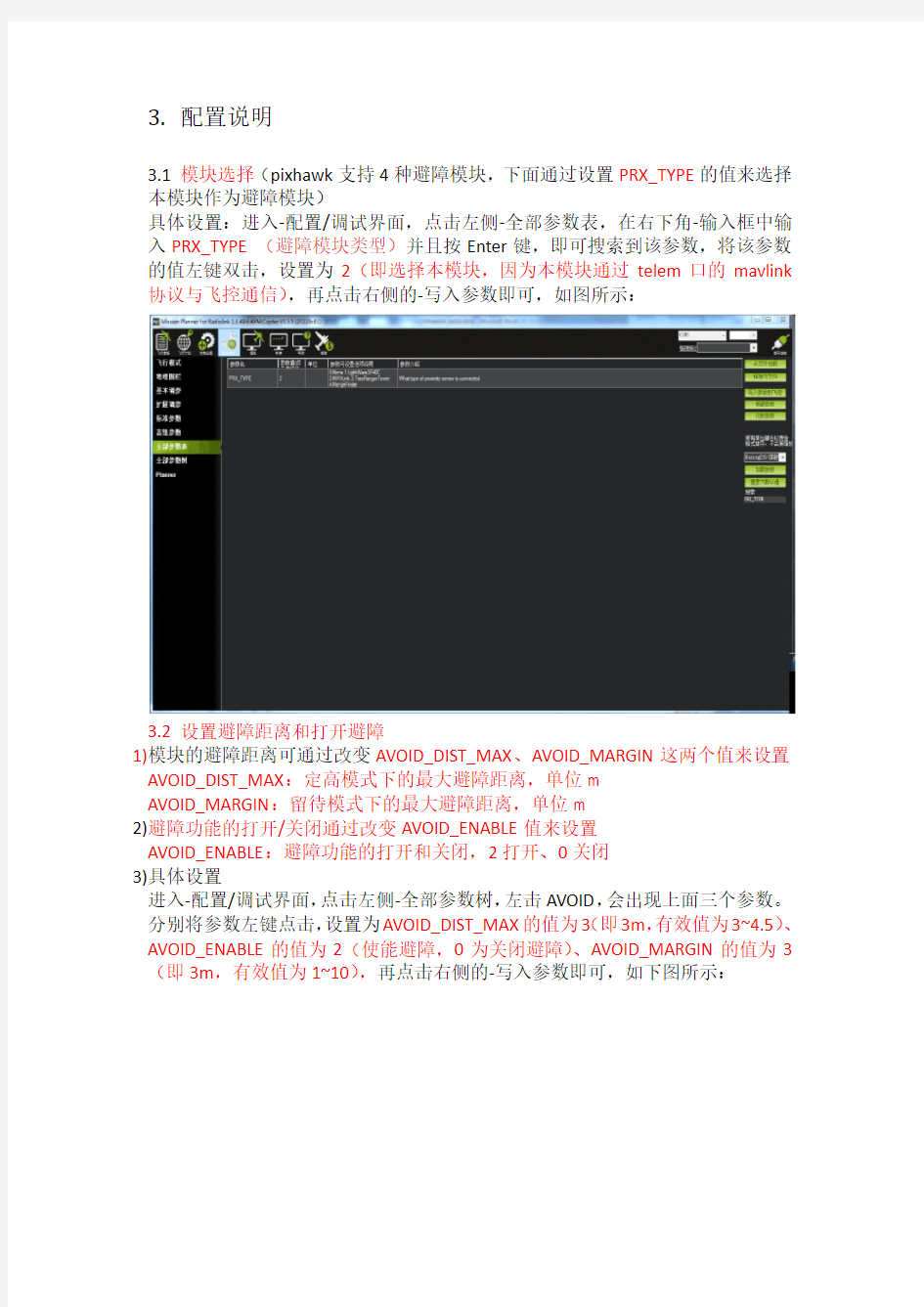
3.1模块选择(pixhawk支持4种避障模块,下面通过设置PRX_TYPE的值来选择本模块作为避障模块)
具体设置:进入-配置/调试界面,点击左侧-全部参数表,在右下角-输入框中输入PRX_TYPE(避障模块类型)并且按Enter键,即可搜索到该参数,将该参数的值左键双击,设置为2(即选择本模块,因为本模块通过telem口的mavlink 协议与飞控通信),再点击右侧的-写入参数即可,如图所示:
3.2设置避障距离和打开避障
1)模块的避障距离可通过改变AVOID_DIST_MAX、AVOID_MARGIN这两个值来设置AVOID_DIST_MAX:定高模式下的最大避障距离,单位m
AVOID_MARGIN:留待模式下的最大避障距离,单位m
2)避障功能的打开/关闭通过改变AVOID_ENABLE值来设置
AVOID_ENABLE:避障功能的打开和关闭,2打开、0关闭
3)具体设置
进入-配置/调试界面,点击左侧-全部参数树,左击AVOID,会出现上面三个参数。分别将参数左键点击,设置为AVOID_DIST_MAX的值为3(即3m,有效值为3~4.5)、AVOID_ENABLE的值为2(使能避障,0为关闭避障)、AVOID_MARGIN的值为3(即3m,有效值为1~10),再点击右侧的-写入参数即可,如下图所示:
3.3设置遥控器打开和关闭避障功能(可选)
1)此项是可选项,可跳过
飞控默认在定高模式和留待模式下,避障功能自动打开,切回自稳时,避障功能自动关闭。但是如果想实时通过遥控器来开启或关闭避障功能,需要进行此项设置。如果想只在定高和留待模式下,自动开启避障功能,可以跳过此项设置。
2)设置CH7_OPT参数。
进入-配置/调试界面,点击左侧-全部参数表,在右下角-输入框中输入CH7_OPT 并且按Enter键,即可搜索到该参数,将该参数的值左键双击,设置为40(物体避障功能),再点击右侧的-写入参数即可,如下图所示
3)遥控器设置
选择一个二挡开关作为控制7通道的开关,在地面站的初始设置界面下的必要硬件的下拉列表中,左击故障保护,打开即可显示7通道的PWM值的界面,当拨动该开关时,7通道的PWM值大于1800,代表开关拨动到该位置时,避障功能打开,拨动到另一个方向是,避障功能关闭。如下图所示
4.数据查看
在完成以上配置之后,就可以查看模块的数据,断开Pixhawk重新启动Mission Planner,在Mission Planner地面站连接时会自动启动一个新的界面,该界面可以查看模块的数据状态(如果不出现该界面,需要点击桌面任务栏下该界面的图标),如图所示
5.飞行模式
在Pixhawk配置完成并且超声波避障定高模块数据正常输出后,需要设置必要的飞行模式,最基本的模式为1:Stabilize(自稳)2:AltHold(定高)3:Loiter (悬停),如图所示
6.实际飞行
在Pixhawk配置完以上所有步骤后,请务必重启Pixhawk飞控再次检查,以上参数是否正确配置,否则有参数未配置成功都有可能造成避障失败,切记!
在确认Pixhawk正确配置所有参数之后,首次飞行,就可以找一个带有墙壁等障碍且比较宽阔的地点实机测试,飞行常用的顺序应该是:
1)给飞行器上电,等待Pixhawk飞控蓝灯闪烁,则表示飞控已经初始化完成
2)等待Pixhawk飞控蓝灯闪烁时,即可长按安全开关,直到Pixhawk安全开关红灯常亮,则表示安全开关打开完毕
3)使用遥控解锁,飞控解锁成功后,飞行器电机会开始转动,此时缓慢推动油门,飞行器起飞后,将飞行模式设置为Loiter(悬停)模式,
4)拨动遥控第7通道(或第8通道,根据之前设置来定),开启避障功能,推动摇杆将飞行器控制向前飞行至接近墙壁障碍,飞行器会自动根据前方障碍的距离来控制速度并停止在距离障碍3米左右的位置,如果由于速度太快或者惯性作用飞行器距离障碍小于3米,飞行器会自主退回至距离障碍3米左右的位置。
7.注意事项
1)使用模块时,pixhawk不能通过USB供电,需要通过电池供电,否则USB供电时造成飞控启动时间较长,模块数据不能正常通讯!!!
2)第一次飞行,请控制飞行器在较低的速度下飞行,以免操作不当造成撞机。
3)在Pixhawk飞控AltHold(定高)模式下,飞机的反应和悬停模式不一样,飞机遇到障碍物时,倾斜的角度会和遥控的pitch和roll进行融合,再做最后反应,所以在全速前进时,可能会出现来不及刹车!悬停模式下,飞机在遇到障碍物时,会停止前进,不管遥控器前进的pitch和roll有多大,因此,水平避障功能需要在悬停模式下进行。
4)模块可以实现水平8个方向的避障,需要通过模块的按键来改变模块的方向。模块默认的方向是向前,当每按一次按键,模块的方向顺时针改变一次,并且模块的灯会闪烁相应的次数,提示当前模块的方向,并且永远保存该反向作为模块的方向,用户还可以通过地面站的数据查看当前模块是哪个方向。如下图
当前为方向向右的模块。
5)模块在检测距离时,检测到物体时,模块的灯会常亮;如果障碍物距离较远,模块检测不到时,模块的灯会不断闪烁,提示不能检测到物体。
6)连接成功好,模块在上电时会闪烁几次,再熄灭,初始化完成时再常亮。
7)安装飞控时,应防止桨叶、机架对信号的干扰。
8)由于模块时收发一体的模块,因此有40cm的盲区,但在小于40cm时,默认为40cm
9)数据查看只能查看水平方向的距离,当没有距离显示时,可能模块的当前方向向上,需要通过日志才能查看向上的方向。
功能二:向上防撞
向上防撞和避障功能一致,但需要通过按键来设置模块的方向为向上。当当前为向前时,按一次按键,模块的灯快闪几次,并且通过地面查看的数据如下图时:
说明当前模块为向上防撞。
对应的防撞距离可以前面的方法设置AVOID_MARGIN(防撞距离)的值即可。
功能三;定高功能
1.安装说明
用4pin的线一端连接pixhawk的I2C口,另一端连接模块,如下图所示:
模块朝下面方向安装
2.配置说明
进入-初始设置界面,点击左侧可选硬件,再点击声呐,在右侧会出现声呐界面。在右侧的选框中,点击下拉,选中“MaxbotixI2C”或者“LightWareI2C”,如下图所示:
不需要保存,重启飞控后,再回到这个界面,会出现模块的距离时,代表设置成功
RNGFND_MAX_CM设置为450,RNGFND_MIN_CM设置为40(单位:cm)
RNGFND_MAX_CM是飞控在定高模式下能识别模块的最大距离
RNGFND_MIN_CM是飞控在定高模式下能识别模块的最小距离
当模块发送的距离超过40~450cm时,飞控不识别模块的距离,通过气压计的距离来进行定高
超声波液位计---红外手操器说明书
手持编程器用法 (1)进入编程模式 注意: ·编程器里的电池可以替换 ·手持编程器需要另外订购 将编程器对准显示屏顶部的红外端口并按键。 参数更改 1 在运行模式下将编程器对准仪器并按编程 键。再按切换 键。进入编程模式。 下一步要键入的数字会进入以下3个区域:参数号区、参数值区、通道号区。由多次重复按切换键选择进入哪个区域。当前状态进入的是参数号区 2 这时字母P 前面的数字消失,出现3个“_ _ _”表示可以更改参数号。键入“001”进入P001号参数,再键入参数值“1”,选择测量模式为“物位测量模式”。 3 按“回车”键 ,保存所设设置。 4 按切 换 键再次选择参数号区。 5 这时字母P 前面的数字消失表示,再次出现3个“_ _ _”,可以更改参数号。键入“002”进入P002号参数,再键入“1” 选择所测类型为“液体”。 6 按“回车”键 保存所设设置。 7 依此类推 设置P003参数的参数值为“2”, P004为“***”(以超声波传感器类型决定,如XPS10探头的代号为:102) P005为“1” P006为零点值,即探头发射面开始算起到仓底的距离。物位下降到此位置时,仪表输出为4mA P007为满度值,即从P006定义的仓底(零点)向上多少米为100%(物位升到此位置时,仪表输出为20mA)。 (在实际应用过程中P006、P007均可设为相同数值。例如:仓高15米,P006=15,P007=15。) 如果所购设备为双通道系列(即一个主机带两个传感器),在设定完01通道后还需要设定02通道, 详细说明如下: 8 如果设置第二通道,将左上角点号切换为“02”,重复以上步骤。 切换方法:按切换 键2次,使左上角显示“___ ___”,然后输入“02” 9 如果需要退出编程模式,进入运行模式,再次按编程键 即可。
蓝牙模块使用说明书
蓝牙模块使用说明 一、模块简介: 1、芯片简介 该蓝牙模块采用台湾胜普科技有限公司的BMX-02X模块为核心,它采用CSR BLUEcore4-External芯片并配置8Mbit的软件存储空间,成本低,使用方便。 CSR BlueCore4是英国Cambridge Silicon Radio(CSR)公司日前推出的第四代蓝牙硅芯片。这种硅芯片用于蓝牙技术推广小组(SIG)推出的增强数据传输率(EDR)蓝牙。CSR的BlueCore4的数据传输率将比现有的v 1.2蓝牙装置快三倍,并且使蓝牙移动电话或手机的耗电量较低。 蓝牙EDR的最大数据传输率为每秒2.1兆比特,而目前v1.2标准传输率则为每秒721千比特。传输率的提高意味着对一个特定量的数据来说,EDR无线电的工作将比v1.2无线电快三倍,从而减少耗电量,大大有利于依赖蓄电池的移动设备。 CSR BlueCore4完全能与现有蓝牙v1.1和v1.2装置兼容。蓝牙EDR用一种相移键控(PSK)调制模式取代标准传输率的Gaussian频移键控(GFSK),实现更高的数据传输率。 CSR BlueCore4正在以两种形式提供——一种用于外部“快闪”存储器,一种用于掩模ROM。BlueCore4-External以一种8×8mm BGA(球形格栅矩阵)封装提供,是十分灵活的解决方案,能够适应迅速更新的市场。例如,由于BlueCore
是目前可以得到的唯一能够支持蓝牙v1.2规格的所有强制和可选功能的硅芯片,BlueCore4-External为PC应用程序提供了理想的解决方案,使它们得益于以三倍速度的传输率无线传输文件,或者同时操作多个高需求的蓝牙链路。 鉴于蓝牙固件安装在芯片只读存储器上,CSR BlueCore4-ROM 的成本较低,占用面积小得多(在小片尺寸包装中为3.8×4mm,在与BC2-ROM和BC3-ROM引脚兼容的BGA中为6×6mm)。ROM芯片的尺寸和成本使它日益成为要求蓝牙功能综合起来的移动电话、手机和其它批量生产和成本敏感的应用产品的选择。 BlueCore4提供48KB的RAM,而以前的BlueCore硅芯片仅为32KB。部分这种额外的记忆存储用于对付增强数据传输率的附加缓冲空间,而其余部分则确保象Scattermode这样的未来规格得到充分支持。 BlueCore4-External和BlueCore4-ROM将先把蓝牙EDR快速数据传输率的优越性带给现有一些主要的蓝牙市场,加快文件传送,降低耗电并实现多个同时链路的操作。它还将为这种技术开辟某些潜在的新应用领域。 2、主要特性 ◆蓝牙版本:V2.0+EDR ◆输出功率:class II ◆Flash存储容量:8Mbit ◆供应电压:5V
基于单片机的超声波测距系统设计实验报告 - 重
指导教师评定成绩: 审定成绩: 自动化学院 计算机控制技术课程设计报告设计题目:基于单片机的超声波测距系统设计 单位(二级学院): 学生姓名: 专业: 班级: 学号: 指导教师: 负责项目: 设计时间:二〇一四年五月 自动化学院制
目录 一、设计题目 (1) 基于51单片机的超声波测距系统设计 (1) 设计要求 (1) 摘要 (2) 二、设计报告正文 (3) 2.1 超声波测距原理 (3) 2.2系统总体方案设计 (4) 2.3主要元件选型及其结构 (5) 2.4硬件实现及单元电路设计 (9) 2.5系统的软件设计 (13) 三、设计总结 (17) 四、参考文献 (17) 五、附录 (18) 附录一:总体电路图 (18) 附录二:系统源代码 (18)
一、设计题目 基于51单片机的超声波测距系统设计 设计要求 1、以51系列单片机为核心,控制超声波测距系统; 2、测量范围为:2cm~4m,测量精度:1cm; 3、通过键盘电路设置报警距离,测出的距离通过显示电路显示出来; 4、当所测距离小于报警距离时,声光报警装置报警加以提示; 5、设计出相应的电子电路和控制软件流程及源代码,并制作实物。
摘要 超声波具有传播距离远、能量耗散少、指向性强等特点,在实际应用中常利用这些特点进行距离测量。超声波测距具有非接触式、测量快速、计算简单、应用性强的特点,在汽车倒车雷达系统、液位测量等方面应用广泛。本次课设利用超声波传播中距离与时间的关系为基本原理,以STC89C52单片机为核心进行控制及数据处理,通过外围电源、显示、键盘、声光报警等电路实现系统供电、测距显示、报警值设置及报警提示的功能。软件部分采用了模块化的设计,由系统主程序及各功能部分的子程序组成。超声波回波信号输入单片机,经单片机综合分析处理后实现其预定功能。 关键词:STC89C52单片机; HC-SR04;超声波测距
风冷模块机组使用说明书
. . . . 风冷模块机组功能说明书 1.0概述 DFSS-5MK控制器适用于水源冷(热)水机组,可以控制单台或6压缩机,控制器由室外主板和室线控器组成,并有风盘联动接口。 2.0主要技术参数 2.1使用条件 运行电压:AC220V±10%;运行环境温度:-20~+55℃;储存温度:-35~+85℃;湿度要求:0~95%RH 2.2温度控制精度:1℃ 2.3控制器符合 □GB4706.1-1988《家用和类似用途电器的安全第一部分:通用要求》 □GB4706.32-1996《家用和类似用途电器的安全热泵﹑空调器和除湿机的特殊要求》 □GB18430.1-2001《蒸汽压缩机循环冷水(热泵)机组工商业用和类似用途的冷水(热泵)机组》 □GB18430.2-2001《蒸汽压缩机循环冷水(热泵)机组户用和类似用途的冷水(热泵)机组》 □抗干扰度符合GB4343.2-1999 □印刷电路板符合GB4588.1和GB4588.2的规定 3.0控制器功能 制冷运行 制热运行 可显示回水温度及设置温度,具有查询功能 掉电自动记忆各种参数 压缩机均衡运行及分时启动 三相缺相,逆相保护 具有完善的保护功能及显示 具有风盘联动接口 选用摩托罗拉高性能芯片,抗干扰性能达到最好 具有定时开关机功能 4.0面板操作 室线控器面板如图一
4.1.开关机 按“运转/停止”键,机组开机,指示灯亮; 再按“运转/停止”键,机组关闭,指示灯灭。 开机,关机均存储数据。 4.2.模式转换 按“模式”键,选择所需的模式,“制冷”“制热”模式 “制冷”模式显示雪花符号 “制热”模式显示太阳符号 (默认在关机状态下才可转换模式) 4.3.定时开关机 设置〖b7〗设置为0时是组合定时(设置请参阅下面设置章节) 开机状态下,按“定时”键,定时关机; 关机状态下,按“定时”键,定时开机; 按“定时”键后,小时时间闪显; 按“时间▽△”键,调整小时定时时间 再按“定时”键后,分钟时间闪显; 按“时间▽△”键,调整分钟定时时间 再按“定时”键,定时设定完成 再按“定时”键,则取消定时 设置〖b7〗设置为1时是循环定时 按“定时”键后,小时时间闪显,开始设定定时开时间; 按“时间▽△”键,调整小时定时开时间 再按“定时”键后,分钟时间闪显; 按“时间▽△”键,调整分钟定时开时间 再按“定时”键,小时时间闪显,定时开时间设定完毕,开始设定定时关时间; 按“时间▽△”键,调整小时定时关时间 再按“定时”键后,分钟时间闪显; 按“时间▽△”键,调整分钟定时关时间 按“定时”键,定时关时间设定完成 4.4.时钟设定 按住“定时”键5秒键后,小时时间闪显,进入时钟设定状态;
超声波焊接机说明书
目录: 一、使用安全指导 1.1注意事项 (2) 1.2使用安全注意事项 (2) 二、机器概述 2.1 机器基本参数 (3) 2.2本机各部件的组成 (3) 2.2.1超声波发生器(机箱)……………………………………………………‥‥4 2.2.2焊接机机体(机架)……………………………………………………………5-6 2.2.3 超声波振动系统…………………………………………………………………6-7 三、超声波发生器的使用………………………………………………………………………8-9 四、线束的焊接放置 (10) 五、安装详述 (10) 六、使用步骤 (11) 6.1 开箱 (11) 6.2 压缩空气进气源 (11) 6.3 焊接机和发生器之间连接 (12) 6.4 启动发生器 (13) 七、调整 (14) 7.1 焊头的更换调整………………………………………………………………14-15-16 7.2 左、右夹块间隙的调整 (17) 7.3线束宽度、高度调节 (18) 7.4 焊接面的更换 (19) 八、拆装系统的检测、拆装与更换.....................................................................19-20 十、维护与保养 (21)
一、使用安全指导 1. 1 注意事项 在启动和使用本公司超声波焊接机之前,请务必仔细阅读以下注意事项! ●使用手册会为你详细介绍超声波焊接机的正确使用方法,请您务必严格遵守执行 ●安装和使用本机必须由经过相关培训的专业人员进行。 ●在工作运行过程中,请您务必不要接触焊接工具头。超声波振动有可能导致严重的皮肤 灼伤。 ●操作人员经过适当培训后,才允许使用超声波焊接机。 ●本机在维护和检修前,应先断电源,防止误操作。维修和保养工作必须由受过专门培训的技术人员来完成。 ●未经设备生产厂商的许可,不得擅自打开机箱,调整机器。否则生产厂商的所有保证将自动失效。 ●操作人员均须严格遵守操作手册的安全和使用事项。 1.2 使用安全注意事项 ●在启动和使用之前,应先确保电缆线是否连接正确,确保超声波 焊接机正常接地。 ●基于使用安全的目的和避免发生损伤请勿将金属钢销或类似的 材料放置在焊接工具之间。 ●请经常的按时对焊接机及焊接工具进行维护保养,确保机器工作 在正常状态下。 ●在焊接过程中出现一些异常的情况、声音,为了避免机器的损伤, 请立即停止使用,由相关的专业人员进行维护或联系售后人员。
TS-L300超声波液位计说明书
公司名称:杭州拓胜自动化仪表有限公司 地址:杭州市石桥路272号商务楼A04室邮编:310022 销售热线:(0571)88138856 /85353259 传真:(0571)85353259 网址:https://www.360docs.net/doc/b0420127.html, E _ mail:hztuosheng@https://www.360docs.net/doc/b0420127.html, 温馨提示:安装调试前,请仔细阅读用户手册!! TS-L300型 用户手册 量程: 仪表工作电压: 杭州拓胜自动化仪表有限公司 超声波液位计
超声波液位计 超声波液位计保修卡回执 用户名称 联系地址 联系人联系电话 产品型号产品编号 验收日期安装负责人…………………………………………………………………… 超声波液位计保修卡说明 产品型号产品编号 验收日期安装负责人 保修政策: ●用户在维修时请出示保修卡。在保修期内因正常使用出现的故障,可凭 保修卡享受规定的免费保修。 ●保修期限:本公司产品保修期由验收日期起算十二个月内。 以下情况不在免费保修范围内: ●产品或其部件已超出免费保修期。 ●因使用环境不符合产品使用要求而导致的硬件故障。 ●因不良的电源环境或异物进入设备所引起的故障或损坏。 ●由于未能按使用操作手册上所写的使用方法和注意事项进行操作而造成的故障。 ●由于不可抵抗力如:雷电、水火灾等自然因素而造成的故障。 擅自拆机修理或越权改装或滥用造成的故障或损坏。 限制说明: ●请用户妥善保存保修卡作为保修凭证,遗失不补。 本保修卡解释权限归本公司所有,本公司有权对本卡内容进行修改,恕不事先通知。 7 超声波液位计 目录 1概述 (1) 2 技术指标 (1) 3仪表安装 (2) 3.1仪表外形尺寸 (2) 3.2仪表接线 (2) 3.3安装参数含义 (3) 3.4仪表安装原则 (3) 3.5安装注意事项 (4) 4仪表调试 (4) 4.1键盘说明 (4) 4.2 参数的设置 (4) 4.2.1 液位标定 (4) 4.2.2 20mA设置 (5) 4.2.3探头高度 (5) 4.2.4显示模式设置 (5) 4.4.7 P--Multi菜单 (6) 超声波液位计保修卡回执 (7)
超声波测距模块说明
最近做超声波测距,就是简单的测量引脚高电平的时间。 思路是这样的 1.使用8MHZ时钟,不分频 初始化Timerx_Init(235,1);//8Mhz的计数频率,计数到235为1cm距离 2. PA0高电平时,打开定时器,测量时间 while(PAin(0)) { TIM3->CR1|=0x01; //使能定时器3 } TIM3->CR1|=0x00; //关闭定时器3 S=temp/2 //测量距离为总路程一半 temp=0;//计数值清零 3.计数到235时,产生中断,进入中断函数。执行temp++操作 void TIM3_IRQHandler(void) { if(TIM3->SR&0X0001)//溢出中断 { temp++; } TIM3->SR&=~(1<<0);//清除中断标志位 } 4.得出距离值S 初学定时器,这样测距思路对吗 实际测试后,S值一直为0,为什么
超声波测距模块说明 1.模块引脚 从左到右(见图)模块引脚分别为:VCC、trig(控制端)、echo(接收端)、out(空脚)、GND 2.主要技术参数: 1:使用电压:DC5V 2:静态电流:小于2mA 3:电平输出:高电平VCC-0.2V 低<0.2V 4:感应角度:不大于15 度 5:探测距离:0.02m-5m 6:探测精度:3mm(既然探测精度精确到毫米,就是说数据可以显示到毫米级,也就是四位数了!) 板上接线方式:VCC、trig(控制端)、echo(接收端)、out(空脚)、GND。OUT 脚为防盗模块时的开关量输出脚,测距模块不用此脚! 3.使用方法: (1)采用IO 触发测距,给TRIG 至少10us 的高电平信号(实际上25us 最佳);此处通过IO口给一个高电平就行了。(2)模块自动发送8 个40khz 的方波,自动检测是否有信号返回; (3)有信号通过ECHO 返回,ECHO 输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.此处用定时
US100使用说明
厦门智控
USUS-100 超声波测距模块
1. 概述
US-100 超声波测距模块可实现 0~4.5m 的非接触测距功能, 拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温 度传感器对测距结果进行校正,同时具有 GPIO,等多种通信方 式,内带看门狗,工作稳定可靠。
2. 主要技术参数 电气参数
工作电压 静态电流 工作温度 输出方式 感应角度 探测距离 探测精度
USUS-100 超声波测距模块
DC 2.4V~5.5V 2mA -20~+70 度 电平或 UART(跳线帽选择) 小于 15 度 2cm-450cm 0.3cm+1%
本模块实物图及 实物图及尺寸 3. 本模块实物图及尺寸
本模块如图 3.1 和图 3.2 所示:
厦门智控
图 3.1: US-100 正面图
图 3.2:US-100 背面图
本模块的尺寸:45mm*20mm*1.6mm。板上有两个半径为 1mm 的机械孔,如图 3.3 所示:
图 3.3:US-100 尺寸图
4. 接口说明
5 Pin 接口为 2.54mm 间距的弯排针,如图 4.1 所示:
厦门智控
图 4.2:5 Pin 接口 从左到右依次编号 1,2,3,4,5。它们的定义如下: 1 号 Pin:接 VCC 电源(供电范围 2.4V~5.5V)。 2 号 Pin:接外部电路的 Trig 端。 3 号 Pin:接外部电路的 Echo 端。 4 号 Pin:接外部电路的地。 5 号 Pin:接外部电路的地。
电平触发测距 测距工作原理 5. 电平触发测距工作原理
电平触发测距的时序如图 5.1 所示:
10US
8 40K
图 5.1:US-100 测距时序图
超声波液位计四线说明书
KOE超声波液位计用户使用手册
目录 一、概述。。。。。。。。。。。。。。。。。。。。。。2 二、产品特色。。。。。。。。。。。。。。。。。。2 三、技术参数。。。。。。。。。。。。。。。。。。3 四、菜单操作及参数设置。。。。。。。。3 五、安装方法及使用注意事项。。。。8 六、接线示意图。。。。。。。。。。。。。。。。10 七、疑难现象及处理方法。。。。。。。。12 八、本机接线定义。。。。。。。。。。。。。。14 九、产品合格证。。。。。。。。。。。。。。。。15 十、产品保修记录卡。。。。。。。。。。。。16
一、概述 超声波物位仪https://www.360docs.net/doc/b0420127.html,是一台博采众长,吸取了国内外多种物位仪优点。实现了全数字化,人性化设计理念的通用型物位仪,具有完善的物位测控,数据传输和人机交流功能。主芯片采用进口工业级单片机,数字温度补偿等…相关专用集成电路。具有抗干扰性强,可任意设置上下限节点及在线输出调节,并带有现场显示,模拟量,开关量及RS485输出任选,可方便与主机连接。外壳采用铝合金防水外壳,探头部分选用PP或不锈钢头,壳体小巧且相当坚固。其电路主板采用优质贴片元器件,贴片式键盘,使产品性能更稳定可靠。因此可广泛应用于与料位,液位测控相关的各个领域。 二、产品特色 ●电压适应范围宽,12-24 V的直流电压内工作。 ●具有手动恢复出厂设置功能。 ●设定比重参数后,能直接显示出容器内重量。 ●在选择电流或电压输出时,可任意调整其输出范围。 ●具有增值/差值测距选择,既可测距离也可测物位。 ●可在工作中自动关闭显示,以节省整机耗电。 ●具有1-15级发射脉冲强度,可根据工况设定。 ●具有满量程起点和终点任意设置功能。 以下各项定货时选购 ●4组限继电器开路控制输出设定,用于料位、液位控制。 ●4~20mA电流输出,RS485串行数据输出 ●选择PC串口输出及转换附件,可直接与PC机组网。
GPS模块使用手册
GPS模块使用手册 一、GPS模块的几个重要指标 1.卫星轨迹 全球有24颗GPS卫星沿6条轨道绕地球运行(每4个一组),GPS接收模块就是靠接收这些卫星来进行定位的。但一般在地球的同一边不会超过12颗卫星,所以一般选择可以跟踪12颗卫星以下的器件就可以了。当然,所能跟踪的卫星数越多,性能越好。大多数GPS 接收器可以追踪8~12颗卫星。计算2维坐标至少需要3颗卫星,4颗卫星可以计算3维坐标。 2.并行通道 由于最多可能有12颗卫星是可见的,GPS接收器必须按顺序访问每一颗卫星来获取每颗卫星的信息,所以市面上的GPS接收器大多数是12并行通道型的,这允许它们连续追踪每一颗卫星的信息。12通道接收器的优点包括快速冷启动和初始化卫星的信息,而且在森林地区可以有更好的接收效果。一般12通道接收器不需要外置天线,除非是在封闭的空间,如船舱或车厢中。 3.定位时间 定位时间是指重启GPS接收器时,确定现在位置所需的时间。对于12通道接收器,冷启动时的定位时间一般为3~5 min,热启动时为15~30 s。 4.定位精度 普通GPS接收器的水平位置定位精度在5~10 m内。 5.DGPS功能 DGPS是一个固定的GPS接收器,用于接收卫星的信号。DGPS可以准确地计算出理论上卫星信号传送到的精确时间,然后将它与实际传送时间相比较,并计算出差值。DGPS将这个差值发送出去,其它GPS接收器就可以利用这个差值得到一个更精确的位置读数(5~10 m或者更少的误差)。许多GPS设备提供商在一些地区设置了DGPS发送机,供客户免费使用,只要客户所购买的GPS接收器有DGPS功能即可。 6.信号干扰 要获得一个很好的定位信号,GPS接收器必须至少能接收到3~5颗卫星。如果是在峡谷中或两边高楼林立的街道上,或者是在茂密的丛林里,有可能接收不到足够的卫星,无法定位或者只能得到二维坐标。同样,如果在一个建筑里面,有可能无法更新位置。一些GPS 接收器有单独的天线可以贴在挡风玻璃上,或者将一个外置天线放在车顶上,这有助于接收器收到更多的卫星信号。 二、HOLUX M-89 GPS模块特性 我们选用的是台湾生产的HOLUX M-89 GPS模块,并为其配备了PCB板,以方便与单片机进行连接,下面与反面如下图所示, HOLUX M-89 GPS接收卫星信号时一般还需要配备天线,如下图所示: HOLUX M-89 GPS模块主要特性如下: 产品特征 通道:并行32通道 频率:L1 1575.42MHz C/A码(1.023MHZ码片速率)
超声波测距实验报告
电子信息系统综合设计报告 超声波测距仪
目录 摘要 (3) 第一章绪论 (3) 1.1 设计要求 (3) 1.2 理论基础 (3) 1.3 系统概述 (4) 第二章方案论证 (4) 2.1 系统控制模块 (5) 2.2距离测量模块 (5) 2.3 温度测量模块 (5) 2.4 实时显示模块 (5) 2.5 蜂鸣报警模块 (6) 第三章硬件电路设计 (6) 3.1 超声波收发电路 (6) 3.2 温度测量电路 (7) 3.3 显示电路 (8) 3.4 蜂鸣器报警电路 (9) 第四章软件设计 (10) 第五章调试过程中遇到的问题及解决 (11) 5.1 画PCB及制作 (11) 5.2 焊接问题及解决 (11) 5.3 软件调试 (11) 实验总结 (13) 附件 (14) 元器件清单 (14) HC-SR04超声波测距模块说明书 (15) 电路原理图 (17) PCB图 (17) 程序 (18)
摘要 该系统是一个以单片机技术为核心,实现实时测量并显示距离的超声波测距系统。系统主要由超声波收发模块、温度补偿电路、LED显示电路、CPU处理电路、蜂鸣器报警电路等5部分组成。系统测量距离的原理是先通过单片机发出40KHz 方波串,然后检测超声波接收端是否接收到遇到障碍物反射的回波,同时测温装置检测环境温度。单片机利用收到回波所用的时间和温度补偿得到的声速计算出距离,显示当前距离与温度,按照不同阈值进行蜂鸣报警。由于超声波检测具有迅速、方便、计算简单、易于做到实时控制的特点,并且在测量精度方面能达到工业实用的要求,因此在生产生活中得到广泛的应用,例如超声波探伤、液位测量、汽车倒车雷达等。 关键词:超声波测距温度测量单片机 LED数码管显示蜂鸣报警 第一章绪论 1.1设计要求 设计一个超声波测距仪,实现以下功能: (1)测量距离要求不低于2米; (2)测量精度±1cm; (3)超限蜂鸣器或语音报警。 1.2理论基础 一、超声波传感器基础知识 超声波传感器是利用晶体的压电效应和电致伸缩效应,将机械能与电能相互转换,并利用波的特性,实现对各种参量的测量。 超声波的传播速度与介质的密度和弹性特性有关,与环境条件也有关: 在气体中,超声波的传播速度与气体种类、压力及温度有关,在空气中传播速度为C=331.5+0.607t/0C (m/s) 式中,t为环境温度,单位为0C. 二、压电式超声波发生器原理 压电式超声波发生器实际上是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。 三、超声波测距原理 由于超声波指向性强,能量消耗缓慢,在空气中传播的距离较远,因而超声波
干簧管传感器模块使用说明书
. 产品使用说明书 产品名称:干簧管传感器模块版本:
用途: 程控交换机、复印机、洗衣机、电冰箱、照相机、消毒碗柜、门磁、窗磁、电磁继电器、电子衡器、液位计、煤气表、水表中等等都得到了很好的应用。 模块特色: 1、采用进口常开型干簧管 2、比较器输出,信号干净,波形好,驱动能力强,超过 15mA。 3、工作电压 3.3V-5V 4、输出形式:数字开关量输出(0 和 1) 5、设有固定螺栓孔,方便安装 6、小板 PCB 尺寸:3.2cm x 1.4cm 7、使用宽电压 LM393 比较器 干簧管的特点: 干簧管是干式舌簧管的简称,是一种有触点的无源电子开关元件,具有结构简单,体积小便于控制等优点,其外壳一般是一根密封的玻璃管,管中装有两个铁质的弹性簧片电板,还灌有一种叫金属铑的惰性气体。平时,玻璃管中的两个由特殊材料制成的簧片是分开的。当有磁性物质靠近玻璃管时,在磁场磁力线的作用下,管内的两个簧片被磁化而互相吸引接触,簧片就会吸合在一起,使结点所接的电路连通。外磁力消失后,两个簧片由于本身的弹性而分开,线路也就断开了。因此,作为一种利用磁场信号来控制的线路开关器件,干簧管可以作为传感器用,用于计数,限位等等(在安防系统中主要用于门磁、窗
磁的制作),同时还被广泛使用于各种通信设备中。在实际运用中,通常用永久磁铁控制这两根金属片的接通与否,所以又被称为“磁控管”。 模块使用说明: 1.干簧管需要和磁铁配合使用,在感应到有一定的磁力的时候,会呈导通状态,模块输出低电平,无磁力时,呈断开状态,输出高电平,干簧管与磁铁的感应距离在1.5cm之内超出不灵敏或会无触发现象; 2.模块 DO 输出端可以单片机 I/O 口直接相连,通过单片机可以检测干簧管的触发状态; 3.模块 DO 输出端与继电器 IN 端相连,组成大功率干簧管开关,直接控制高电压。 产品接线说明: 1、VCC 接电源正极 3.3-5V 2、GND 接电源负极 3、DO TTL 开关信号输出
超声波测距数码管显示,内容完全正确
《单片机课程设计》 设计报告 设计课题:超声波测距 专业班级:电子信息工程xxx班 学生姓名: wang da na 指导教师: cai 设计时间: 2015年7月9日 赣南师范学院科技学院数学与信息科学系
超声波测距 一、设计任务与要求 1.设计任务: (1)利用超声波测量距离。 (2)使用数码管显示测出的距离。 (3)在超出一定的范围后进行报警。 二、方案设计与论证 1设计方案 采用单片机来控制超声波测距,信号线发射到与超声波发射器相连的信号端,超声波发射器向既定方向发射,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物将产生回波,超声波接收器接收回波,产生电平变化。 通过单片机设计一个程序,处理超声波接受的信号,计算出发射与接受的时间差,并根据距离公式计算出距离,用数码管显示。 把所测出的距离分范围,超出2米或小于0.1米蜂鸣器报警,当处于正常范围时立即停止报警。 2 原理框图 图(1) 系统原理框图 51单片机 数码管显示模 块 报警模块 超声波模块
三、电路设计 1. 电路设计 图(2)电路图 2. 主要性能参数计算 (1)超声波测距模块 本测距系统采用超声波渡越时间检测法。其原理为:检测从发射传感器发射的超声波经气体介质传播到接收传感器的时间t,这个时间就是渡越时间,然后求出距离l。设l为测量距离,t为往返时间差,超声波的传播速度为c,则有l=ct/2。超声波接收器收到反射波就立即停止计时。再由单片机计算出距离,送数码管显示测量结果。 超声波测距的算法设计: 超声波在空气中传播速度为每秒钟340米(15℃时)。t2是接收超声波时刻,t1是超声波声波发射时刻,t2-t1得出的是一个时间差的绝对值,假定t2-t1=0.03S,则有340m×0.03S=10.2m。由于在这10.2m 的时间里,超声波发出到遇到返射物返回的距离如下:如图2-2-1为测距原理。
分体超声波液位计使用说明书
注意:控制器直接暴露在阳光下,其运行温度可能会超过其指定的限制温度,并减少显示器的能见度。建议:在阳光直射的场合,采用遮阳罩,避免仪器显示屏受到阳光直射,否则会减低仪器的使用寿命 温馨提示:安装调试前,请仔细阅读用户手册!! YI2000型 用户手册 量程:0.5-5米 额定电压: AC220V 分体超声波液位计
目录 1概述 (3) 2 技术指标及选型代码 (4) 3仪器安装 (5) 3.1支架安装和法兰尺寸 (5) 3.2仪表安装方式 (6) 3.3仪表安装原则 (6) 3.4安装注意事项 (6) 3.5仪表接线 (7) 4仪表调试说明 (9) 4.1仪表界面显示说明 (9) 4.2键盘说明 (10) 4.3菜单说明 (11) 4.4参数的设置 (12) 4.4.1仪表标定的步骤 (12) 4.4.2参数4~20mA设置 (12) 4.4.3继电参数设置 (13) 4.4.4换能器高度设置 (15) 4.4.5显示模式设置 (16) 4.4.6 Window菜单 (16) 4.4.7地址ID号设置 (16) 4.4.8波特率设置 (16) 4.4.9PWDB设置 (16) 4.4.10 4~20mA设定输出 (16) 5设备清单 (17) 5.1生产厂家提供的设备以及附件 (17) 5.2现场需要具备的条件 (17)
注意事项 ●使用和运输过程中请勿强烈摇晃或碰撞设备。 ●仪表在运输与储存期间,环境温度不允许低于-40 ℃和高于+80℃,相对 湿度不大于85%,且周围不含有腐蚀性气体、无强烈电磁场;运输期间必须使用原配包装箱。 ●避免油渍及各种化学物质沾污探头表面及损伤表面。 法律免责声明 ●本产品,从最初购买的交付之日起,如果存在原材料和生产工艺上的缺 陷,都有一年的保修期限,但此类产品需在正常存储、使用和维修条件下操作并按照说明书进行。 ●出售给原购人的产品中所包括的非本公司的所有产品,仅包括特定供应 商所提供的保修(如果有),本公司不对此类产品承担任何责任。 ●本保修仅提供给原购人而不可转让。本保修不适用于任何因误用、疏忽、 事故或异常操作条件下引起损坏的产品。消耗件不在本保修范围之列。 ●本保修范围内的产品如出现任何缺陷,将不得继续使用,以防进一步损 坏。购买人须立即向本公司报告任何缺陷,否则本保修将不适用。 ●本公司如在检查后证明产品确属材料或制造缺陷,可自行决定免费维修 或替换任何此类缺陷产品,条件是该产品须在上述一年期限内退回给本公司。 ●本公司无义务或责任承担任何上述之外的缺陷。 ●本产品免于其它明示或暗示保修。本公司特此放弃特定用途的适销性和 适用性的暗示保修。 1 超声波液位计保修卡回执 用户名称 联系地址 联系人联系电话 产品型号产品编号 验收日期安装负责人 超声波液位计保修卡说明 产品型号产品编号 验收日期安装负责人 保修政策: ●用户在维修时请出示保修卡。在保修期内因正常使用出现的故 障,可凭保修卡享受规定的免费保修。 ●保修期限:本公司产品保修期由验收日期起算十二个月内。 以下情况不在免费保修范围内: ●产品或其部件已超出免费保修期。 ●因使用环境不符合产品使用要求而导致的硬件故障。 ●因不良的电源环境或异物进入设备所引起的故障或损坏。 ●由于未能按使用操作手册上所写的使用方法和注意事项进行操作而造 成的故障。 ●由于不可抵抗力如:雷电、水火灾等自然因素而造成的故障。 擅自拆机修理或越权改装或滥用造成的故障或损坏。 限制说明: ●请用户妥善保存保修卡作为保修凭证,遗失不补。 ●本保修卡解释权限归本公司所有,本公司有权对本卡内容进行修 改,恕不事先通知。 18
K-CU01 主控制器模块使用说明书
HOLLiAS MACS -K 系列模块 2014年5月B版
HOLLiAS MAC-K系列手册- K-CU01 主控制器模块使用说明书 重要信息 危险图标:表示存在风险,可能会导致人身伤害或设备损坏件。 警告图标:表示存在风险,可能会导致安全隐患。 提示图标:表示操作建议,例如,如何设定你的工程或者如何使用特定的功能。
目录 1.概述 (1) 2.接口说明 (2) 2.1主控单元结构示意图 (2) 2.2底座接口说明 (4) 2.3地址跳线 (8) 2.4IO-BUS (11) 3.状态灯说明 (12) 4.其他特殊功能说明 (14) 4.1短路保护功能 (14) 4.2诊断功能 (15) 4.3冗余功能 (15) 4.4掉电保护 (16) 5.工程应用 (18) 5.1底座选型说明 (18) 5.2应用注意事项 (18) 6.尺寸图 (19) 6.1K-CU01尺寸图 (19) 6.2K-CUT01尺寸图 (19) 7.技术指标 (20) 7.1K-CU01主控制器模块 (20) 7.2K-CUT01 4槽主控器底座 (21)
K-CU01 主控制器模块 1.概述 K-CU01是K系列硬件的控制器模块,是系统的核心控制部件,主要工作是收集I/O模块上报的现场数据,根据组态的控制方案完成对现场设备的控制,同时负责提供数据到上层操作员站显示。 控制器基本功能块主要包括系统网通讯模块、核心处理器、协处理器(IO-BUS主站MCU)、现场通讯数据链路层、现场通讯物理层、以及外围一些辅助功能模块。 K-CU01控制器模块支持两路冗余IO-BUS和从站I/O模块进行通讯,支持两路冗余以太网和上位机进行通讯,实时上传过程数据以及诊断数据。可以在线下装和更新工程,且不会影响现场控制。 K-CU01控制器模块支持双冗余配置使用。当冗余配置时,其中一个控制器出现故障,则该控制器会自动将本机工作状态设置为从机,并上报故障信息;若作为主机出现故障,则主从切换;若作为从机出现故障,则保持该状态。 两块控制器模块K-CU01和两块IO-BUS模块安装在4槽主控底座K-CUT01上,就构成了一个基本的控制器单元。 通过主控底座的主控背板,完成两个控制器模块之间的冗余连接,控制器模块通过IO-BUS模块扩展可以连接最多100个I/O模块。 通过选用不同的IO-BUS模块,控制总线拓扑结构可构成星型和总线型;同时支持远程I/O机柜。 基本的控制器单元如图1-1所示。
超声波液位计简明调试方法
超声波液位计(FMU30)简明调试方法 1.接线方式 屏蔽电缆接入仪表后,24V电压接在仪表的+,—上面,屏蔽层接到仪表里面的接地端子。另外,为保持仪表测量的稳定性,仪表外部的接地端子尽量也做一下接地。 2.调试方法 一般来说,超声波液位计的调试需要修改如下几个选项,002(罐体形状),003(介质属性),004(过程条件),005(空罐标定),006(满罐标定) 上电以后,仪表自检,然后变到测量值00, ⑴按E键进入基本设置菜单,首先看到的是002这个选项,显示的是(拱顶罐,水平卧罐,旁通管,,等几个选项),如需更改,按+或者—号键选需要选择的罐型,按E键确定。更改后+,-号键一起按返回上层菜单。 ⑵如不需更改,直接按E键进入下个菜单003。003代表被测量介质的属性,有如下几个选项(未知,液体,固体直径大于4mm,固体直径小于4mm,, 等),根据现场情况进行选择。修改方法同上。 ⑶继续按E键进入004菜单,有如下几个选项(标准,平静液面,带搅拌器,,等)一般工况选择标准。根据实际情况选择。 ⑷继续按E键进入005菜单,这个是需要修改的很重要的一个值。这个值是空罐值。把池底到超声波探头表面的实际距离输入仪表,按+键进入菜单,选中空罐的值,按E键确认修改,+,—用来修改数值,E键确认。 ⑸ +,—号一起按返回005的主目录,继续按E键进入006菜单,这个也是需要修改的值,这个值是满罐值,它表示池底到最高液位的距离,修改方法同空罐值。
基本上,仪表的调试已经完成。 另,如果显示值波动较大,这个在罐子里面的测量可能出现,这个需要做一下回波抑制。在基本设定中,按E键找到051这个菜单,进入后选择(manual,手动),+,—号—起按返回051菜单,继续按E键进入052菜单,输入抑制的距离,这个距离比空罐值要低一点,如果空罐5M的话,建议输入4.8M。+—一起按返回052菜单,继续按E键进入053菜单,选择抑制打开,等超声波自己开始进行回波抑制后,仪表会自动跳回抑制关闭状态,表示回波抑制完成。界面也会跳到008这个菜单,上面显示(测量的距离/测量值)测量距离表示探头表面到液面的距离,测量值表示池底到液面的距离。
充电模块使用说明书 模板
充电模块使用说明书
1概述 2型号说明 2.1 产品外形结构 2.2 产品重量 2.3 端子功能定义 3工作条件 4主要功能和特点 4.1 稳压、限流运行功能 模块能以设定的电压值和限流值长期对电池组充电并带负载运行。当输出电流大于限流值时模块自动进入稳流运行状态,输出电流小于限流值时模块自动进入稳压运行状态。 4.2 输出电压、输出电流调节功能 模块通过后台监控可以调节输出电压和最大限流值。 4.3并机功能 多台同型号的模块可以并联运行并自动均流。若其中某台故障时可自动退出,且不影响其它模块的正常运行。 4.4热插拔功能 并联工作在机架上的多台充电模块,在不停电状态下,可以任意插拔其中任一台模块使其接入或脱离系统,而不影响其他模块的正常工作。 4.5 散热方式 风冷。 4.6 指示灯 前面板上有3个指示灯,具体说明见表2.
表2 指示灯说明 4.7保护及报警功能 4.7.1输入保护 若充电模块的交流输入电源出现过、欠压时,模块即刻停机,无输出电压,面板上“保护ALM”黄灯亮。当交流输入电源恢复正常后,面板上“保护ALM”黄灯灭,模块自动启动,正常运行。 4.7.2短路保护 充电模块内部设有输出短路打嗝工作,可承受连续短路而不损坏模块,面板上“故障FAULT”红灯亮。当短路恢复正常后,面板上“故障FAULT”红灯灭,模块自动启动,正常运行 4.7.3过温保护 当充电模块中的整流二极管后段上部与散热器温度接触部分的温度超过100℃时,模块将自动停机,面板上“保护ALM”黄灯亮。温度降低至正常后,整流模块会自动启动,进入正常运行。 4.7.4输出过压保护 充电模块的直流输出电压大于其直流输出过压保护值时,模块停机;面板上
售后服务模块使用说明书
EAP企业管理软件平台 售后服务模块使用说明书
目 录 1.售后服务管理 (5) 1.1基础信息管理 (6) 1.1.1不良现象维护 (6) 1.1.1.1刷新信息 (7) 1.1.1.2新增信息 (7) 1.1.1.2编辑信息 (8) 1.1.2不良原因维护 (9) 1.1.3维修站档案维护 (10) 1.1.3.1刷新信息 (10) 1.1.3.2新增信息 (10) 1.1.3.3编辑信息 (11) 1.1.3.4查询信息 (11) 1.1.4故障部位维护 (12) 1.1.5维修方法维护 (13) 1.2客户服务管理 (14) 1.2.1客户信息维护 (14) 1.2.2客户反馈维护 (15) 1.3质量反馈管理 (18) 1.3.1质量反馈信息维护 (18) 1.3.1.1申请 (18) 1.3.1.2审核 (20) 1.3.1.3通过 (21) 1.3.1.4确认 (22)
1.3.1.5处理完 (23) 1.3.2质量反馈-修理月报表 (24) 1.3.2.1刷新信息 (24) 1.3.2.2查询信息 (25) 1.3.2.3打印信息 (25) 1.3.2.4导出信息 (25) 1.4配件仓库管理 (26) 1.4.1配件信息维护 (26) 1.4.2仓库入库 (27) 1.4.2.1入库 (27) 1.4.2.2处理完 (27) 1.4.3仓库出库 (28) 1.4.3.1申请 (28) 1.4.3.2处理中 (28) 1.4.3.3出库 (28) 1.4.3.4处理完 (29) 1.5业务订单管理 (30) 1.5.1订单维护 (30) 1.5.1.1申请 (30) 1.5.1.2订购中 (30) 1.5.1.3转到入库 (30) 2、编写约定 (31) 2.1 通用格式约定 (31) 2.2 图形界面格式约定 (31) 2.3 鼠标操作约定 (31)
AJ-SR04M-超声波测距模块(单头)
一体化超声波测距模块 使用说明书 型号: AJ-SRO4M-T-X 产品实物图: 深圳市安吉电子 深圳安吉电子
目录 >>产品概述 (2) >>产品特点 (4) >>产品应用 (4) >>技术参数 (5) 产品结构图 (5) 电气参数 (5) >>模块输出格式说明 (6) 模式切换方法 (6) 模块启动流程 (6) 模式1工作方式 (7) 模式2工作方式 (8) 模式3工作方式 (9) 模式4工作方式 (10) 模式5工作方式 (11) 开关量工作方式 (12)
>>模块安装说明 (13) 波束角图 (13) 位置选择 (14) 情况一 (14) 情况二 (14) 情况三 (15) 情况四 (15) 情况五 (16) 测人范围 (16) >>注意事项 (17) >>产品尺寸 (17) 超声波换能器尺寸 (17) 控制主板尺寸 (18) 板载换能器主板尺寸 (18)
>>产品概述 AJ-SR04M-T-X超声波测距模块,是采用收发一体的防水带线探头,运用 非接触试超声波探测技术设计而成。产品在20cm 至800cm 范围内,能够准确探测出与平面物体间的距离,并且在20cm 至250cm 范围内,能够准确测人。 基本工作原理:此超声波测距模块连接3-5.5V 电源后,模块本具备5种工作模式。如有相关要求,可以与本公司联系,我们会为您提供和定做符合您需求的产品 模式1:普通脉宽方波 最低功耗2.5mA 模式2:低功耗脉宽方波 最低功耗40uA 模式3:自动串口 最低功耗2.5mA 模式4:串口触发 最低功耗20uA 模式5:ASCII码输出 最低功耗20uA >>产品特点 1、体积小,使用便捷; 2、功耗低, 先择低功耗模式时 <20ua ; 3、使用电压宽 3-5.5V工作电压 3、测量精度高最高分辩率1mm精度; 4、抗干扰强; 5、一体化封闭式防水带线探头,适用于潮湿、恶劣的测量场 >>产品应用场合 1、智能小车测距,避障 2、物体距离测量,人体高度测量 3、智能交通控制,停车位控制 4、教研,安防,工业控制 5、人工智能,飞机高度测量等