实验二PID控制器参数对控制系统性能的影响
实验二 数字PID 控制器的设计
——直流闭环调速实验
预习报告
一、实验目的:
1. 理解晶闸管直流单闭环调速系统的数学模型和工作原理;
2. 掌握PID 控制器参数对控制系统性能的影响;
3. 能够运用MATLAB/Simulink 软件对控制系统进行正确建模并对模块进行正确的参数设置;
4. 掌握计算机控制仿真结果的分析方法。 二、实验工具:
MATLAB 软件(6.1以上版本)。 三、实验内容:
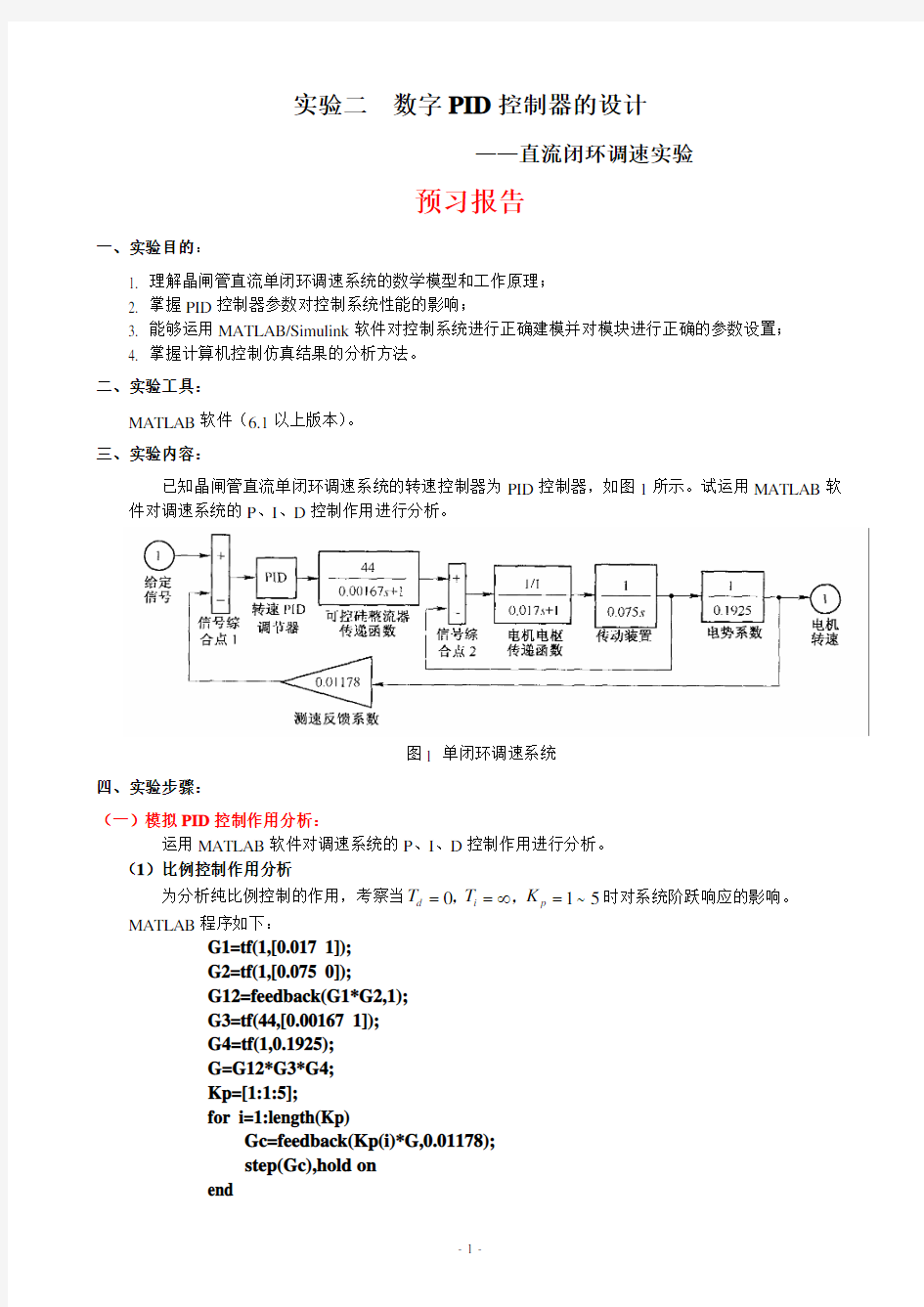
已知晶闸管直流单闭环调速系统的转速控制器为PID 控制器,如图1所示。试运用MATLAB 软件对调速系统的P 、I 、D 控制作用进行分析。
图1 单闭环调速系统 四、实验步骤:
(一)模拟PID 控制作用分析:
运用MATLAB 软件对调速系统的P 、I 、D 控制作用进行分析。 (1)比例控制作用分析
为分析纯比例控制的作用,考察当0d i p T T K 15==∞=~,, 时对系统阶跃响应的影响。MATLAB 程序如下:
G1=tf(1,[0.017 1]);
G2=tf(1,[0.075 0]);
G12=feedback(G1*G2,1); G3=tf(44,[0.00167 1]); G4=tf(1,0.1925); G=G12*G3*G4; Kp=[1:1:5];
for i=1:length(Kp)
Gc=feedback(Kp(i)*G,0.01178); step(Gc),hold on end
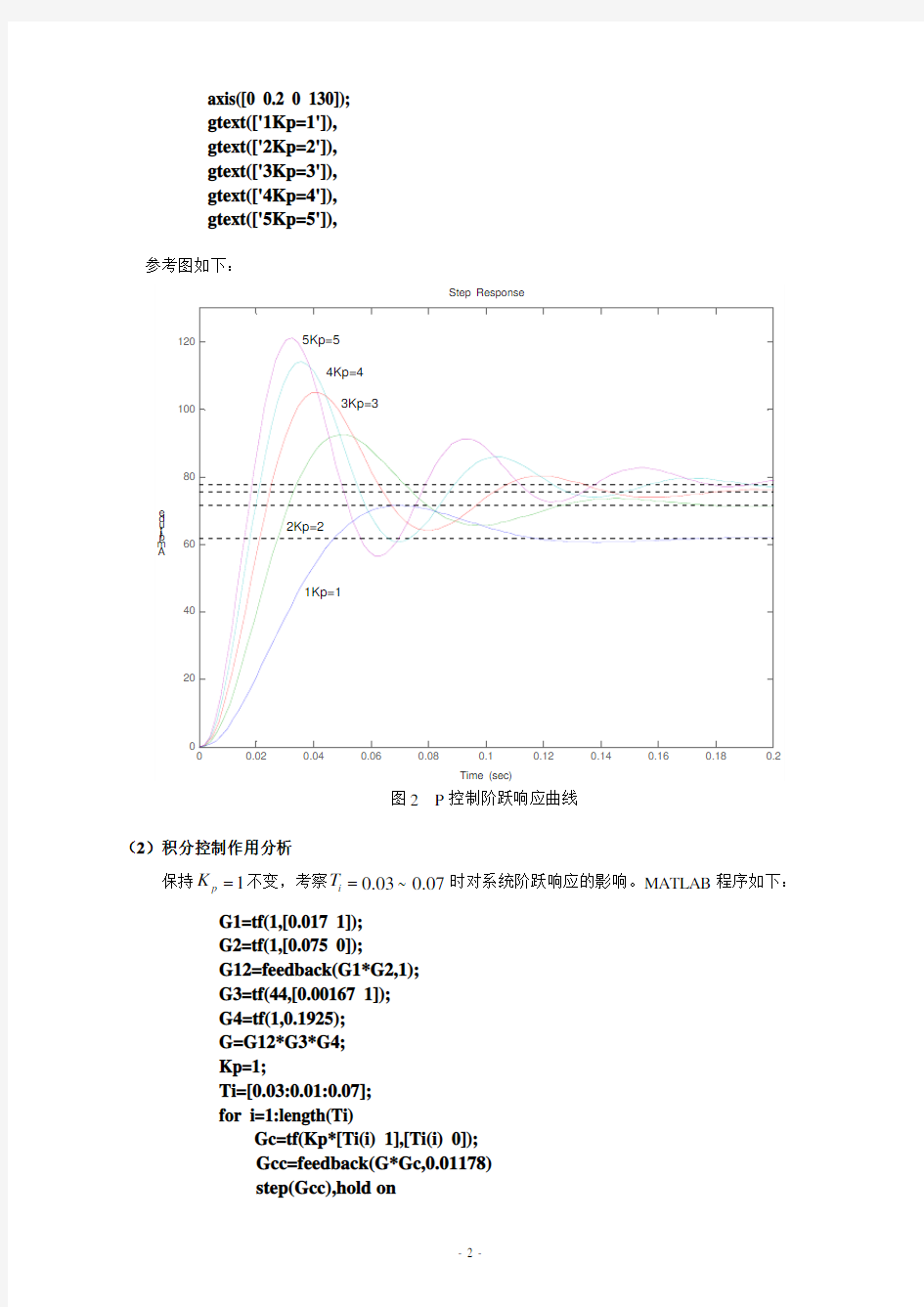
axis([0 0.2 0 130]); gtext(['1Kp=1']), gtext(['2Kp=2']), gtext(['3Kp=3']), gtext(['4Kp=4']), gtext(['5Kp=5']),
参考图如下:
图2 P 控制阶跃响应曲线
(2)积分控制作用分析
保持不变,考察时对系统阶跃响应的影响。MATLAB 程序如下:
1p K =0.030.07i T =~G1=tf(1,[0.017 1]); G2=tf(1,[0.075 0]);
G12=feedback(G1*G2,1); G3=tf(44,[0.00167 1]); G4=tf(1,0.1925); G=G12*G3*G4; Kp=1;
Ti=[0.03:0.01:0.07]; for i=1:length(Ti)
Gc=tf(Kp*[Ti(i) 1],[Ti(i) 0]); Gcc=feedback(G*Gc,0.01178) step(Gcc),hold on
end
gtext(['1Ti=0.03']), gtext(['2Ti=0.04']), gtext(['3Ti=0.05']), gtext(['4Ti=0.06']), gtext(['5Ti=0.07']),
(3)微分控制作用分析
为分析微分控制的作用,保持0.010.01p i K T ==, 不变,考察当1284d T =~时对系统阶跃响应的影响。MATLAB 程序如下:
G1=tf(1,[0.017 1]); G2=tf(1,[0.075 0]);
G12=feedback(G1*G2,1); G3=tf(44,[0.00167 1]); G4=tf(1,0.1925); G=G12*G3*G4; Kp=0.01; Ti=0.01;
Td=[12:36:84]; for i=1:length(Td)
Gc=tf(Kp*[Ti*Td(i) Ti 1],[Ti 0]); Gcc=feedback(G*Gc,0.01178) step(Gcc),hold on end
gtext(['1Td=12']), gtext(['2Td=48']), gtext(['3Td=84']),
(4)仿真结果分析
自己根据实验曲线,进行仿真结果分析。 (二)数字PID 控制作用分析:
仿照上述过程,独立完成PID 离散化仿真程序编写及结果分析。
(1)比例控制作用下,取采样时间0.001秒。 仿真结果参考图如图3。
图3 数字P控制作用仿真结果图
(2)比例积分控制作用下,取采样时间0.001秒。
仿真结果参考图如图4。
图4 数字PI控制作用仿真结果图
(3)比例积分微分控制作用下,取采样时间0.05秒。
仿真结果参考图如图5。
图5 数字PID控制作用仿真结果图(4)仿真结果分析
自己根据实验曲线,进行仿真结果分析。
*选作实验*
一、系统描述:
伺服跟踪控制系统如图6所示。要求运用Simulink 软件对给出的伺服跟踪控制系统进行建模,并分析控制器参数、、对控制系统控制性能的影响。
e K 1c T 2c
T
图6 伺服跟踪控制系统
其中各个参数分别为:
12316
0.001,27,56,0.0275,9,0.004065,
1.7110,2500,28.3,0.5,4440.0,0.049,
0.02865,0.04
c c c e A A m L L s V G B T T T K A K R L J N F J K K T K ?=========×=======
二、实验步骤:
(1)从Simulink 相应模块库中选择建模所需模块。 (2)对所选模块进行正确连接。
(3)设置模块运行参数、仿真时间和解法参数。 (4)运行系统仿真。
三、建立仿真:
设置仿真时间为10秒,采用变步长的ode45解法,设置输入信号为普通正弦信号。
四、参数分析:
控制器参数、、对控制系统控制性能的影响。 e K 1c T 2c T
执笔人: 北京交通大学
测控系 王爽心
2005年5月22日