最新智能控制技术(亲自整理的知识点)

智能控制
(1)智能控制与传统控制的区别
答:传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制问题,难以解决对复杂系统的控制。
智能控制能解决被控对象的复杂性、不确定性、高度的非线性,是传统控制发展的高级阶段。
(2)智能控制的概念
答:智能控制是人工智能、自动控制、运筹学的交叉。
(3) 1986年美国的PDP 研究小组提出了BP 网络,实现了有导师指导下的网络学习,为神
经网络的应用开辟了广阔的发展前景。
(4) 专家系统主要由知识库和推理机构成(核心)
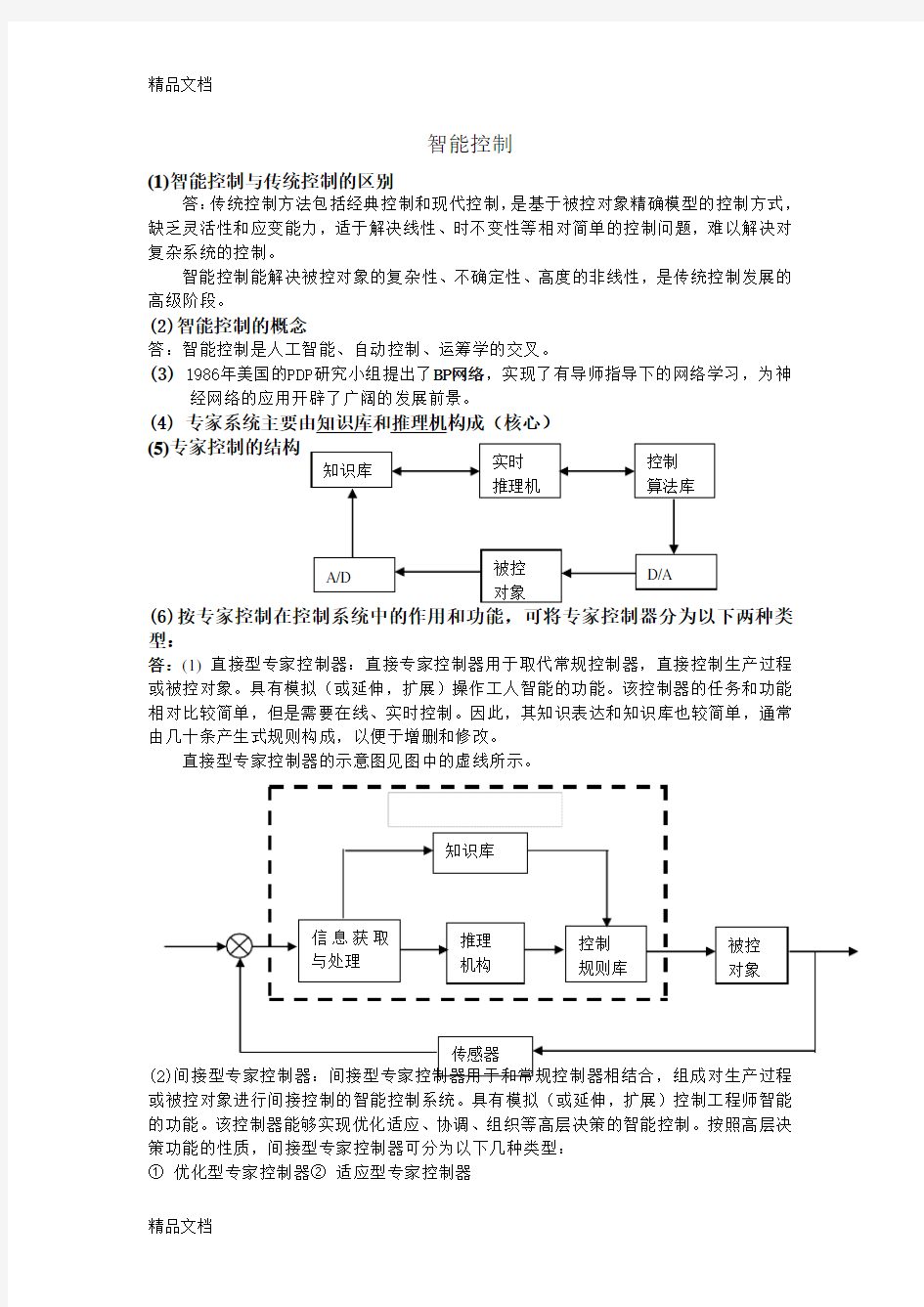
(5)专家控制的结构
(6)按专家控制在控制系统中的作用和功能,可将专家控制器
分为以下两种类型:
答:(1) 直接型专家控制器:直接专家控制器用于取代常规控制器,直接控制生产过程或被控对象。具有模拟(或延伸,扩展)操作工人智能的功能。该控制器的任务和功能相对比较简单,但是需要在线、实时控制。因此,其知识表达和知识库也较简单,通常由几十条产生式规则构成,以便于增删和修改。
直接型专家控制器的示意图见图中的虚线所示。
(或被控对象进行间接控制的智能控制系统。具有模拟(或延伸,扩展)控制工程师智能的功能。该控制器能够实现优化适应、协调、组织等高层决策的智能控制。按照高层决策功能的性质,间接型专家控制器可分为以下几种类型: ① 优化型专家控制器② 适应型专家控制器
③ 协调型专家控制器④ 组织型专家控制器
例3.4 设 求A ∪B ,A ∩B 则
(7) 在模糊控制中应用较多的隶属函数有以下6种隶属函数。 (1)高斯型隶属函数
高斯型隶属函数由两个参数σ和c 确定:2
22)(),,(σσc x e
c x f --=
其中参数b 通常为正,参数c 用于确定曲线的中心。 M a t l a b 表示为 c]),σ[gaussmf(x,
(3) S 形隶属函数
S 形函数s i g m f (x ,[a c ])由参数a 和c 决定:)
(11),,(c x a e c a x f --+=
其中参数a 的正负符号决定了S 形隶属函数的开口朝左或朝右,用来表示“正大”或“负大”的概念。M a t l a b 表示为sigmf(x,[a,c])
(4)梯形隶属函数
梯形曲线可由四个参数a ,b ,c ,d 确定:???
???
?????≥≤≤--≤≤≤≤--≤=d
x d x c c d x d c x b b x a a b a x a x d c b a x f 01
),,,,( 其中参数a 和d 确定梯形的“脚”,而参数b 和c 确定梯形的“肩膀”。 M a t l a b 表示为:
d])c,b,[a,trapmf(x,
(5)三角形隶属函数
三角形曲线的形状由三个参数a ,b ,c 确定????
????
?≥≤≤--≤≤--≤=c
x c x b b c x c b x a a
b a x a x
c b a x f 00
),,,(
其中参数a 和c 确定三角形的“脚”,而参数b 确定三角形的“峰”。 M a t l a b 表 示为c])b,[a,trimf(x, (6)Z 形隶属函数
4
3
2
15.04.01.03.0u
u u u B A +++=I 43216.08.02.09.0u u u u B A +++=Y 4
3215.08.02.09.0u u u u A +++=
43216.04.01.03.0u u u u B +++=
这是基于样条函数的曲线,因其呈现Z 形状而得名。参数a 和b 确定了曲线的形状。
例3-10 设
图 高斯型隶属函数(M=1)
图 S 形隶属函数(M =3) 图 梯形隶属函数(M=4) 图 三角形隶属函数(M =5)
图 Z 形隶属函数(M=6) ?
?1.07.0??9.04.0
则
例3-9 设论域x={a 1,a 2,a 3},y={b 1,b 2,b 3},z={c 1,c 2,c 3},已知
3
211
.015.0a a a A ++=
3
216
.011.0a b b B ++=
2
11
4.0c c C +=
试确定“If A AND B then C ”所决定的模糊关系R ,以及32111
.05.00.1a a a A +
+=
11230.10.51B b b b =
++时的输出C 1
。
解:
[]T 0.50.1
0.50.5A B=10.11
0.60.1
1.00.60.10.1
0.1
0.1A B ??
??
?????∧=∧=??????????
??
将A ×B 矩阵扩展成如下列向量:
()[][]
T
T1
T
R=A B C= 0.10.50.50.1 1.00.6
0.10.10.10.410.10.4
0.40.10.40.40.10.10.10.10.5
0.5
0.11
0.6
0.10.10.1????=?
???
o
当输入为A 1和B 1时,有:
()
[]
T2
0.10.510.10.50.50.10.10.1A B ?=()[]T
111
110.1
0.510.50.1
0.5
10.1
0.50.50.10.1
0.1
0.1A B A B ??
??
??
???=?=∧=??????????
??
将A 1×B 1矩阵扩展成如下行向量:
最后得
[][]
T
10.10.4
0.40.10.40.40.10.10.10.10.51
0.1
0.5
0.5
0.1
0.1
0.10.1
0.5
0.5
0.1
1
0.6
0.1
0.1
0.1 0.4
0.5C ??=?
???
=o 即:
112
0.40.5C c c =
+
(8)模糊控制原理框图
??
????=??????∨∨∨∨=9.03.09.07.01.09.02.03.09.01.04.07.0B A Y ??
?
???=??????∧∧∧∧=1.02.01.04.01.09.02.03.09.01.04.07.0B A I ??
????=??????----=1.07.09.03.09.013.011.017.01A