GPS-CORS操作步骤
一、华测CORS简要操作说明
外业操作
首先将手簿和GPS主机用蓝牙连接在一起,方法如下:打开RTKCE(测地通),选择【配置】——【手簿端口配置】,选择【蓝牙】和【X90DGP】S打钩。点【配置】,选择【搜索】,系统会自动搜索主机蓝牙,搜索完成之后点击【主机编号】,选择【绑定】,【退出】——【确定】即可。(蓝牙绑定之后,下次开机时只要打开软件就可以自动连接)
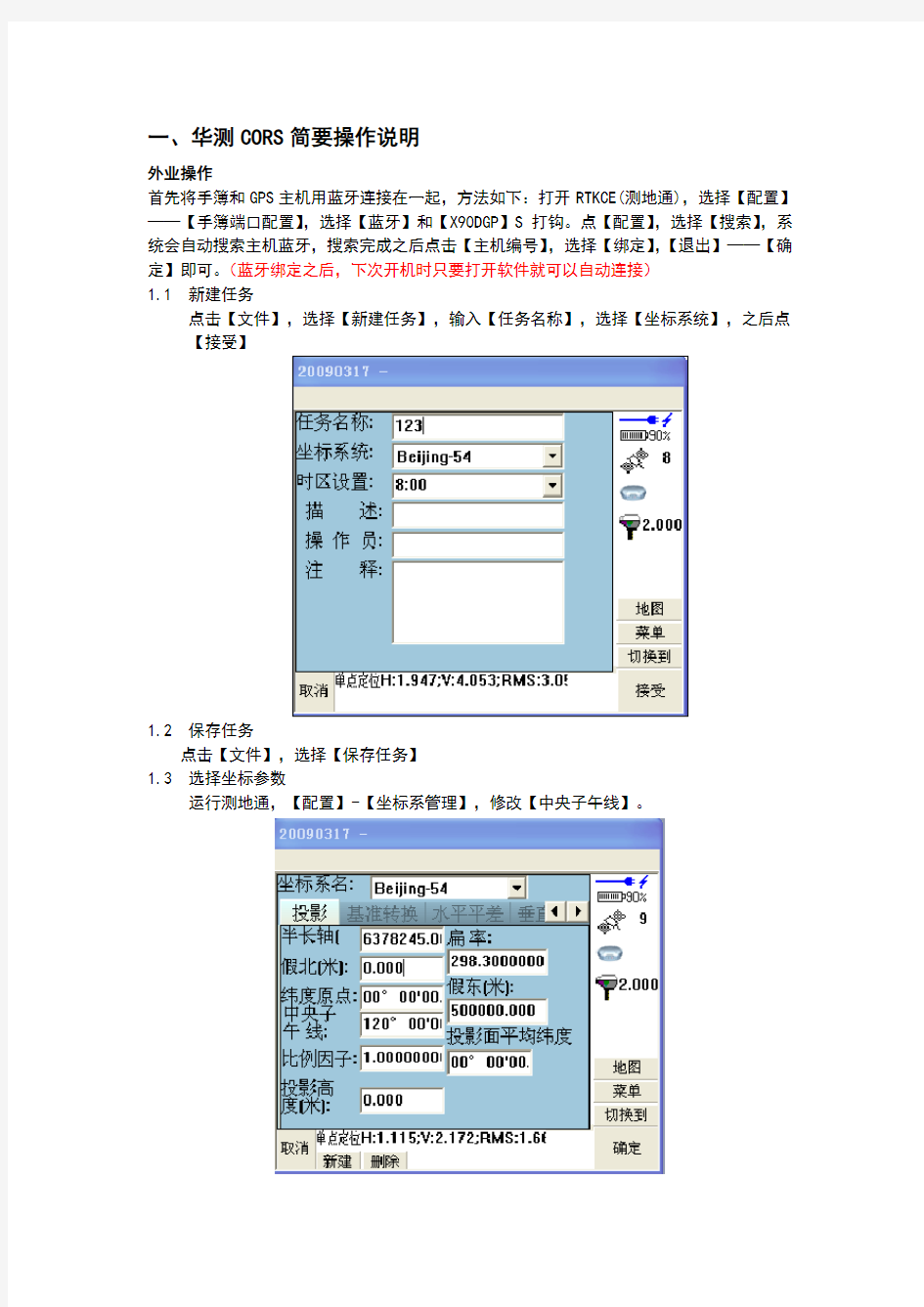
1.1新建任务
点击【文件】,选择【新建任务】,输入【任务名称】,选择【坐标系统】,之后点【接受】
1.2保存任务
点击【文件】,选择【保存任务】
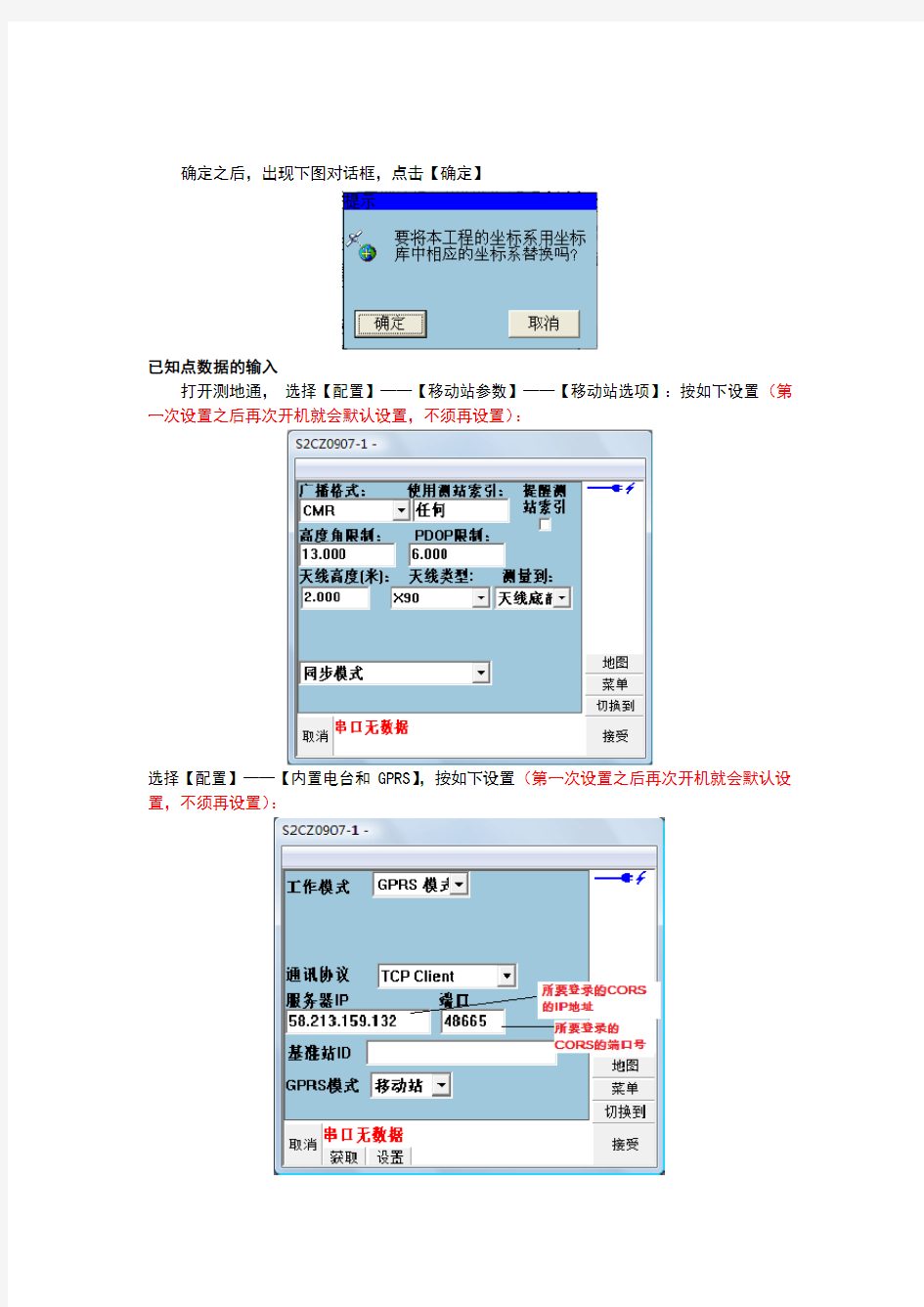
1.3选择坐标参数
运行测地通,【配置】-【坐标系管理】,修改【中央子午线】。
确定之后,出现下图对话框,点击【确定】
已知点数据的输入
打开测地通,选择【配置】——【移动站参数】——【移动站选项】:按如下设置(第一次设置之后再次开机就会默认设置,不须再设置):
选择【配置】——【内置电台和GPRS】,按如下设置(第一次设置之后再次开机就会默认设置,不须再设置):
选择完内容之后,点【设置】,将内容写入接收机(设置表示修改,获取表示查看)。
选择【配置】——【移动站参数】——【内置VRS移动站】,将源列表(江苏CORS默认的源列表是Leica),用户名,密码输入:
JSCORS中心:IP—,端口:48665
南师大CORS基站:IP—;接入点—RTCM30;端口—6060;
用户账号—nsd1—nsd10,;密码—同账号
当GPRS状态显示“准备CORS登陆”的时候点【设置】,过一段时间会弹出一个对话框“成功登录VRS网络,请启动移动站接收机”,点【确定】,此时GPRS状态会显示CORS登陆成功。
点击【测量】——【启动移动站接收机】。约15秒钟左右仪器就会由无差分信号到固定。
只有到固定的状态才可以测量(这样才能保证精度)。
所有跟测量相关的内容都在测量界面下
测地形:通过测量——测量点对需要测量的地物进行测量。在选项中可以更改观测时间和水平精度、垂直精度。要求:控制点A3954,A4115一定要观测
如果想查看测得点坐标只需点文件——元素管理器——点管理器就可以查看到各个点的坐标。
点放样:选择测量——点放样——常规点放样,按照个人想要放样的点选择方法,如果放样的点很多,将所有的点增加进来以后,选择最近点进行放样,放完该点之后再在放样列表中将删除该点(在点管理器中是不会被删除的)。
导入数据:
首先要新建一个文本文档,然后在文本文档里编辑需要放样的格式,具体参照下图:
将手簿开机后,用数据线连上电脑,然后将数据保存在手簿里即可。
导入时只需选择【文件】——【导入】——【当地点坐标导入】,在路径里找到手簿里保存的文件点【接受】。在【文件】——【元素管理器】——【点管理器】中可以查看点的坐标。导出数据:
选择【文件】——【导出】——【点坐标导出(.dat)或其他格式数据导出】。
如果第一次测量或放样没有进行完,第二次进行测量或放样的时候只需选择之前的任务,然后选择【配置】——【移动站参数】——【内置VRS移动站】,当GPRS状态显示“准备CORS 登陆”时点设置,然后提示登录成功的时候,等仪器固定即可接着进行工作。
二、南方CORS简要操作说明(工程之星)
1.插手机卡,接收机开机;
2.接收机与手簿连接:双击右下角蓝牙标识——>点击“扫描设备”——>选中接收机编号
——>点“+”符号——>双击“串口服务”,串口号选7,8或9——> “确定”——>“OK”
3.手簿与基站的连接:双击“EGSTAR”(工程之星——>“配置”——>“端口配置”,修改
端口号(和前一步串口号相同)——> “确定”;
4.接收机与基站的网络连接:“配置”——>“网络设置”——>“编辑”:前4项默认设置:
连接方式—GPRS;模式—NTRIP-VRS;IP—;接入点—RTCM30;端口—6060;用户账号—nsd2,;密码—同账号——> “确定”(warning询问窗口——>OK),出现“所有参数设置完毕”——> “确定”;点击左下角“连接”,4个步骤都√(如第2项GPRS不能通过,检查手机卡)——>(提示“成功完成连接”)“确定”
(如果连接完成后回到主界面,状态栏中P是单点解,需要查看差分格式:配置——>
仪器设置——>移动站设置——>差分数据格式RTCA(省网RTCM3))
5.数据文件的预处理:点击“工程”——>“新建工程”——> 输入作业路径:日期+小组
编号(自动在此目录下生成一个*.eg文件)——> “确定”——>椭球系名称—WGS84;
“下一步”——> 投影方式—高斯投影;中央子午线—;“下一步”——> 不选“启用四参数”,直接“下一步”——>“下一步”——>直接“确定”;(用于将WGS84坐标转换到地方坐标系,若只获取原始点坐标,此步骤可省去)(按照提示可配置其他参数,如数据点采集方式“平滑测量”)
6.参数设置:配置——>工程设置——>查看——>查看工程配置参数(即查看和编辑上一
步的配置)
7.数据采集:(待卫星数足够、几何精度因子满足精度要求)点击“测量”——>“点测量”
(或快捷键“A”)——>点击ENT保存,编辑点信息(其中选杆高,输入实际高度)——>查看点信息(或快捷键“BB”)
8.数据导出设置:所有点测完,点击“工程”——>“文件导入导出”,选中“文件导出”
——>“测量文件”(是新建的*.eg文件名,包含所有的点信息)编辑“——>成果文件”,输入导出的文件名(经过简化的用户自定义的数据文件);数据格式是用户自定义的(可选择南方CASS的DAT文件:“Pn,Pc,y,x,h”),“导出”,“OK”
9.数据导出:打开同步软件ActiveSync—>选择“浏览”—>“Flash Disk”\“Jobs”\
10.点校正:
①在已知控制点量测GPS坐标
②输入——>求转换参数——>增加——>输入已知点原始坐标——>确定——>从坐标管
理库选点——>确定——>确定
③重复②直到所有参与校正的点坐标输入完毕
④输入——>求转换参数——>保存——>在当前工程目录下生成一个参数文件.cot—
—>OK
⑤输入——>求转换参数——>应用——>是
11.异常:如果端口断开,在“配置”——>“端口配置”中重新连接一下;
12.其他操作:左下角“信息”:查看点位、星图、星表(信噪比>45较好,4颗以上卫星);
右下角“图形”:查看当前工程下所有测点的平面图;
13.“测量”——>“点放样”:点击“向上箭头”、“目标”(选择已经存储的要放样的点坐
标),然后按提示移动接收机
南方接收机指示灯说明:
3个灯(表达6种指示,上下各3个)
上3红基站蓝牙电池
下3绿差分卫星外接电源
设置模式:同时长按“开机键”+“F键”(听到声音放开)
按“F键”在6个灯之间切换,分别是:
1.移动站-
2.基准站-
3.静态-
4.(内置电台)数据链-
5.网络手机卡(做移动站)-
6.外接电台(做基站)
不同模式的组合:1-5(CORS);1-4(RTK的移动站);2-6(RTK的基站);3(静态接收)“开机键”确定
短按“F键”查看当前模式
只按“开机键”,默认上一次的测量模式
第2个灯,显示卫星数
第3个灯,电量(闪烁表明电量不足)
华测接收机指示灯说明:
外业测量
领取仪器:卫星接收机、手簿、对中杆、对讲机
对中、整平
记录数据:测站编号、对中杆高度
每点观测时间10—15秒
草图记录
注意事项:
成功进行观测的四要素:
?接收机
?CORS基站运行正常
?手机卡通讯正常
?卫星运行正常
地形点的选取
测图中的其他问题
一定要绘制草图
地形点编号
多路径效应
空间后方交会编程实习报告
空间后方交会编程实习报告 一实习目的 用程序设计语言(Visual C++或者C语言)编写一个完整的单片空间后方交会程序,通过对提供的试验数据进行计算,输出像片的外方位元素并评定精度。本实验的目的在于让学生深入理解单片空间后方交会的原理,体会在有多余观测情况下,用最小二乘平差方法编程实现解求影像外方位元素的过程。通过上机调试程序加强动手能力的培养,通过对实验结果的分析,增强学生综合运用所学知识解决实际问题的能力。 二实习内容 利用一定数量的地面控制点,根据共线条件方程求解像片外方位元素。 三实习数据 已知航摄仪的内方位元素:f k =153.24mm,x =y =0.0mm,摄影比例尺为1:50000; 4个地面控制点的地面坐标及其对应像点的像片坐标: 四实习原理 如果我们知道每幅影像的6个外方位元素,就能确定被摄物体与航摄影像的关系。因此,如何获取影像的外方位元素,一直是摄影测量工作者所探讨的问题。可采取的方法有:利用雷达、全球定位系统(GPS)、惯性导航系统(INS)以及星相摄影机来获取影像的外方位元素;也可以利用影像覆盖范围内一定数量的控制点的空间坐标与摄影坐标,根据共线条件方程,反求该影像的外方位元素,这种方法称为单幅影像的空间后方交会。 单像空间后方交会的基本思想是:以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的外方位元素Xs,Ys,Zs,t,w,k。 五实习流程 (1)获取已知数据。从摄影资料中查取影像比例尺1/m,平均摄影距离(航空摄影的航高、内方位元素x0,y0,f;获取控制点的空间坐标Xt,Yt,Zt。 (2)量测控制点的像点坐标并进行必要的影像坐标系统误差改正,得到像点坐标。 (3)确定未知数的初始值。单像空间后方交会必须给出待定参数的初始值,在竖直航空摄影且地面控制点大体对称分布的情况下,可按如下方法确定初始值:
中药处方的调配流程
中药处方的调配流程 The document was finally revised on 2021
中药处方的调配流程 一按规定进行处方审核 1.首先查看患者姓名、性别、年龄、处方日期、医师签名/盖章等,项目不全则不予调配。 2.审阅处方药名、剂量、剂数、先煎、后下等书写是否规范,如有疑问立即与处方医师联系,更改之处需医师再次签名。 3.如有相反、相畏药物时不予调配,确属病情需要时经医师再次签名后方可调配。 4.当处方剂量超量时,特别是有毒剧药如制川乌、制草乌、制附子、麻黄、马钱子、细辛等超过用量,应与处方医师联系纠正或重签字后方可调配。 5.了解各种用药禁忌,如妊娠、哺乳、肝、肾功能不全、老年、体弱者等忌服的中药,必要时提示医生及患者。 二看划价 1.由于中药的别名较多,划价工作宜由中药专业人员完成。 2.经审方合格后才能划价。 3.计价方法是将每味药的剂量乘以单价得出每味药的价格,再将全方相加即得总价,以四舍五入的方法保留至分。 4.代煎药可加收煎药费。 三是调配
1.调配前再次审查相反、相畏、禁忌、毒性药剂量等,确认处方没有差错。 2.根据药物不同体积重量选用适当的戥子,一般用克戥,称取贵重或毒性药,克以下的要用毫克戥,保证剂量准确。称量前检查定盘星准。 3.一方多剂时用递减分戥法称量,每味药应逐剂回戥,特别是毒性药禁止凭主观估量,更不可随便抓配。 4.坚硬或大块的矿石、果实、种子、动物骨及胶类药,调配时应捣碎成小块或粗末入药。 5.不得将变质、发霉、虫蛀等药品调配入药。 6.为便于核对,按照处方药味顺序调配,顺序间隔摆放。 7.先煎、后下、包煎、烊化、另煎、冲服等特殊煎煮方法的药品必须单包并注明。 四是检查复核 1.复核药品与处方所开药味和剂数是否符合,有无多配、漏配、错配、掺混他药或异物等现象; 2.有无相反、相畏、妊娠禁忌和超剂量等; 3.有无变质、发霉、虫蛀、鼠咬、泛油、以生代制、未捣碎等; 4.是否将先煎、后下、包煎、烊化、另煎、冲服等特殊要求药品单包;. 5.抽查剂量准确程度,要求每剂重量差异不超过±5%,贵重药和毒性药不超过±1%。 五是发药
摄影测量后方交会
单张相片后方交会
目录 ●作业任务 (3) ●解算原理 (3) ●具体过程 (4) ●算法描述及程序流程 (4) ●计算结果 (7) ●结果分析 (8) ●心得体会及建议 (8) ●参考文献 (9)
一,作业任务 已知摄影机主距f=153.24mm,四对点的像点坐标与相应地面坐标列入下表: 表1-1 计算近似垂直摄影情况下后方交会解。 二,解算原理 【关键词1】中心投影构像方程 在摄影测量学中,最重要的方程就是中心投影构像方程(图2-1)。这个方程 将地面点在地面摄影测量坐标系中的坐标(物方坐标)和地面点对应像点的像平 面坐标联系起来。在解析摄影测量与数字摄影测量中是极其有用的。在以后将要 学习到的双像摄影测量光束法、解析测图仪原理及数字影像纠正等都要用到该 式。 图2-1 在上述公式中:x和y分别为以像主点为原点的像点坐标,相应地面点坐标 为X,Y,Z,相片主距f以及外方位元素Xs,Ys,Zs,ψ,ω,κ。 而在此次作业中,就是已知四个地面控制点的坐标以及其对应的像点坐标, 通过间接平差原理来求解此张航片的外方位元素。 【关键词2】间接平差 在一个平差问题中,当所选的独立参数X的个数等于必要观测值t时,可将 每个观测值表达成这t个参数的函数,组成观测方程,然后依据最小二乘原理求 解,这种以观测方程为函数模型的平差方法,就是间接平差方法 间接平差的函数模型为: 随机模型为: 平差准则为:VtPV=min 【关键词3】单像空间后方交会 利用至少三个已知地面控制点的坐标A(Xa,Ya,Za)、B(Xb,Yb,Zb)、Z(Xc,
Yc,Zc),与其影像上对应的三个像点的影像坐标a(xa,ya)、b(xb,yb)、c(xc,yc),根据共线方程,反求该像点的外方位元素Xs,Ys,Zs,ψ,ω,κ。这种解算方法是以单张像片为基础,亦称单像空间后方交会。 在此次作业中,就是已知四个控制点在地面摄影测量坐标系中的坐标和对应的像点坐标。由此可以列出8个误差方程,存在两个多余观测数,则n=2。故可利用间接平差里,依据最小二乘法则,进行求解。由于共线条件方程是非线性函数模型,为了便于计算,需把非线性函数表达式用泰勒公式展开成现行形式,即“线性化”。而又因为仅取泰勒级数展开式的一次项,未知数的近似值改正是粗略的,所以必须计算采用逐渐趋近法,解求过程需要反复趋近,直至改正值小于限差为止。 三,具体过程 1,获取已知点数据:从摄影资料中查取像片比例尺1/m,平均航高,内方元素x0,y0,f;从外业测量成果中,获取控制点的地面测量坐标Xt,Yt,Zt,并转换成摄影测量坐标X,Y,Z。 2,量测控制点的像点坐标:将控制点标刺在像片上,利用立体坐标量测仪量测控制点的像框坐标,并经像点坐标改正,得到像点坐标x,y。 3,确定未知数的初始值:在竖直摄影测量情况下,角元素的初始值为0,及ψ=ω=κ=0; 线元素中,Zso =m*f+(Z[0]+Z[1]+Z[2]+Z[3])/4,Xso,Yso的取值可用四个角点上制点坐标的平均值,即:Xso=(X[0]+X[1]+X[2]+X[3])/4;Yso=(Y[0]+Y[1]+Y[2]+Y[3])/4;4,计算旋转矩阵R:利用角元素的近似值计算方向余弦,组成R阵。公式如下:R[0][0]=cos(ψ)*cos(k)-sin(ψ)*sin(w)*sin(k); R[0][1]=-cos(ψ)*sin(k)-sin(ψ)*sin(w)*cos(k); R[0][2]=-sin(ψ)*cos(w); R[1][0]=cos(w)*sin(k); R[1][1]=cos(w)*cos(k); R[1][2]=-sin(w); R[2][0]=sin(ψ)*cos(k)+cos(ψ)*sin(w)*sin(k); R[2][1]=-sin(ψ)*sin(k)+cos(ψ)*sin(w)*cos(k); R[2][2]=cos(ψ)*cos(w); 5,逐点计算像点坐标的近似值:利用未知数的近似值按共线方程计算控制点像点坐标的近似值(x)、(y); 6,组成误差方程式:参照教材(5-8)式、(5-9b)式、(5-4)式逐点计算误差方程的系数阵和常数项。 7,组成法方程:计算法方程的系数矩阵与常数项。 8,解求外方位元素:根据法方程,按间接平差原理解求外方位元素改正值,并与相应的近似值求和,得到外方位元素的新的近似值。 9,检查计算是否收敛:将求得的外方位元素的改正值与规定的限差比较,小于限差则计算终止,否则用新的近似值重复第4至第8步骤计算,直至满足要求为止。 四,算法描述及程序流程。 算法描述(图4-1):
全站仪后方交会法步骤和高程测量步骤
全站仪后方交会法步骤和 高程测量步骤 Revised final draft November 26, 2020
1、角度测量(angleobservation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB,则: 1)当精度要求不高时: 瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。 2)当精度要求高时:——可用测回法(methodofobservationset)。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。 2、距离测量(distancemeasurement) PSM、PPM的设置——测距、测坐标、放样前。 1)棱镜常数(PSM)的设置。 一般:PRISM=0(原配棱镜),-30mm(国产棱镜) 2)大气改正数(PPM)(乘常数)的设置。 输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。 (1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”(MEAS)。 3、坐标测量(coordinatemeasurement) (1)功能:可测量目标点的三维坐标(X,Y,H)。 (2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已
知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。。。 若输入:方位角,测站坐标(,);测得:水平角和平距。则有: 方位角: 坐标: 若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有: 高程: (3)方法: 输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。 4、点位放样(Layout) (1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。 (2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值dD和角度差dHR或纵向差值ΔX和横向差值ΔY。 3)根据显示的dD、dHR或ΔX、ΔY,逐渐找到放样点的位置。
全站仪后方交会操作过程
全站仪放样,作为施工过程中一项重要环节,对技术员已上升为必须擅长的仪器操作内容。全站仪建站一般有两种方法,即极坐标法建站和后方交会法建站。现以尼康全站仪为例,讲述全站仪后方交会法建站、放样全过程。(其他品牌全站仪可参考进行) 一、建站 1.将仪器架于两已知点均可通视,且可完全看到放样目标点位置的高处。尽量保证视线夹角在60度左右,仪器架设高度适中,三脚架腿踩实,不可出现放样过程中架腿松动现象。(注意:整个放样过程中仪器附近不应有人来回走动,且放样人员应尽量站在一点不动,减少因人员走动导致仪器震动偏移。) 2.固定仪器,上下松动架腿大致调整圆水准器气泡基本居中,按下电源键开机,上下左右转动一下,按下“0”键,进入精平模式。 将水准管放于平行于两螺旋连线方向,关注屏幕上数值,“”过大,便同时向内或向外转动平行方向两螺旋至数值符合要求(一般数值处于5"以内即可);“”过大,便左转或右转垂直方向螺旋至数值符合要求。旋转60度,检查,若仍有些许偏差,再按上述调整。再旋转60度继续检查至完成。 3.按下“确定”键记录,按“建站”键进入建站模式,选择“后方交会法”按“确定”。①若全站仪内已有建站点坐标,可在“PT”栏输入点名(“MODE”键可切换数字与字母),按“确定”键自动跳出坐标,再输入棱镜高(本项目为1.35m和1.2m两种);②若全站仪内无建站点坐标,于“PT”处按“确定”键进入坐标输入界面,XYZ
输完后,按“确定”回到界面,再输入仪器高。 CD数值暂时不输,按“确定”跳过进而记录,进入瞄准后视点1界面,视线内横竖丝卡住棱镜头“横竖尖头”(一般要求:竖向从镜杆底部瞄起,再翻转上去;横向以卡住两边尖为准),瞄准后,点击“测量1”(一般仪器内部设置“测量1”为棱镜模式且双频,“测量2”为免棱镜模式且单频,具体设置可内部调节变动)测量,待响两声后,在不转动仪器前按“确定”键记录,重复“PT”输入点坐标和棱镜高进行后视点2的瞄准,按“测量1”测量(若发现测量时后视瞄准有移动,再瞄准再按“测量1”测量)。 4.确定无误后,按“确定”键记录,自动开始计算建站误差,一般要求建站误差在5mm以内。(考虑仪器自身状态和其他情况,计算出结果有几种不正常情况:①建站误差过大,处理办法为按一次“ESC 键”返回测量后视点2,再次瞄准,测量,再计算,若还是很大,重新建站;②出现“输入第三个点”,处理办法为检查输入点坐标是否输入有误,确定无误,再次测量,若不行,重新建站) 建站误差符合要求后,按“确定”键记录,重新输入点名,其他可按“确定”或“”键跳过,最后“确定”键完成建站。 二、放样 点击“放样”键,按“确定”或“”键跳过界面,至下一个坐标输入界面,输入坐标,瞄准,“测量1”测量,按指示告知架镜人员左右前后移动至定点位置,通知定点。 一次“ESC”键返回,再按“确定”或“”键跳过界面,进入下
处方调配的一般程序药学专业技术人员应按操作规程调剂处方药品
处方调配的一般程序药学专业技术人员应按操作规程调剂处方药品,一般包括以下过程:认真审核处方,准确调配药品,正确书写药袋或粘贴标签,包装;向患者交付处方药品时,应当对患者进行用药说明 与指导。 1.审核处方首先是开方医师的资质是否符合规定,不同的药品是否使用规定的处方笺书写,还包括以 下内容: (1)对规定必须做皮试的药物,处方医师是否注明过敏试验及结果的判定; (2)处方用量与临床诊断的相符性; (3)剂量、用法; (4)剂型与给药途径; (5)是否有重复给药现象; (6)是否有潜在临床意义的药物相互作用和配伍禁忌。 2.调配药品 (1)仔细阅读处方,按照药品顺序逐一调配; (2)对贵重药品及麻醉药品等分别登记账卡; (3)药品配齐后,与处方逐条核对药名、剂型、规格、数量和用法,准确规范地书写标签; (4)调配好一张处方的所有药品后再调配下一张处方,以免发生差错; (5)对需要特殊保存的药品加贴醒目的标签提示患者注意,如“置2~8℃保存”; (6)在每种药品外包装上分别贴上用法、用量、贮存条件等的标签; (7)核对后签名或盖名章; (8)法律、法规、医保、制度等有关规定的执行情况。 特殊调剂:根据患者个体化用药的需要,药师应在药房中进行特殊剂型或剂量的临时调配,如稀释液体、磨碎片剂并分包、分装胶囊、制备临时合剂、调制软膏等,应在清洁环境中操作,并作记录。 3.发药 (1)核对患者姓名,最好询问患者所就诊的科室以帮助确认患者身份; (2)逐一核对药品与处方相符性,检查规格、剂量、数量,并签字; (3)发现配方错误时,应将药品退回配方人,并及时更正;
(4)向患者说明每种药品的服用方法和特殊注意事项,同一药品有两盒以上时要特别说明; (5)发药时应注意尊重患者隐私; (6)尽量做好门诊用药咨询工作。 药品的摆放1.根据药品性质所要求的条件,对不同性质的药品应按规定放置冷藏、干燥处,常温以及避 光、冰冻等分别保存; 2.根据药品管理法要求,分别对麻醉药品、精神药品、毒性药品等分别专柜加锁保存; 3.从药品价格出发,对贵重药品单独保存; 4.对一些误用可引起严重反应的一般药品,如氯化钾注射液、氢化可的松注射液等宜单独放置; 5.对于名称相近、包装外形相似、同种药品不同规格等常引起混淆的药品应分开摆放并要有明显标记。 来源:考试大-初级药士、初级药师、主管药师考试 对差错的应对措施及处理原则 差错处理应遵守以下步骤: 1.建立本单位的差错处理预案。 2.当患者或护士反映药品差错时,须立即核对相关的处方和药品;如果是发错了药品或错发了患者, 药师应立即按照本单位的差错处理预案迅速处理并上报部门负责人。 3.根据差错后果的严重程度,分别采取救助措施,如请相关医师帮助救治、到病房或患者家中更换、 致歉、随访,取得谅解。 4.若遇到患者自己用药不当,请求帮助,应积极提供救助指导,并提供用药教育。 5.认真总结经验,对引起差错的环节进行改进,订出防止再次发生的措施。 责编
单像空间后方交会和双像解析空间后方-前方交会的算法程序实现
单像空间后方交会和双像解析空间后方-前 方交会的算法程序实现 遥感科学与技术 摘要:如果已知每张像片的6个外方位元素,就能确定被摄物体与航摄像片的关系。因此,利用单像空间后方交会的方法,可以迅速的算出每张像片的6个外方位元素。而前方交会的计算,可以算出像片上点对应于地面点的三维坐标。基于这两点,利用计算机强大的运算能力,可以代替人脑快速的完成复杂的计算过程。 关键词:后方交会,前方交会,外方位元素,C++编程 0.引言: 单张像片空间后方交会是摄影测量基本问题之一,是由若干控制点及其相应像点坐标求解摄站参数(X S,Y S,ZS,ψ、ω、κ)。单像空间后方交会主要有三种方法:基于共线条件方程的平差解法、角锥法、基于直接线性变换的解法。而本文将介绍第一种方法,基于共线条件方程反求象片的外方位元素。 而空间前方交会先以单张像片为单位进行空间后方交会,分别求出两张像片的外方位元素,再根据待定点的一对像点坐标,用空间前方交会的方法求解待定点的地面坐标。可以说,这种求解地面点的坐标的方法是以单张像片空间后方交会为基础的,因此,单张像片空间后方交会成为解决这两个问题以及算法程序实现的关键。
1.单像空间后方交会的算法程序实现: (1)空间后方交会的基本原理:对于遥感影像,如何获取像片的外方位元素,一直是摄影测量工作者探讨的问题,其方法有:利用雷达(Radar)、全球定位系统(GPS)、惯性导航系统(I N S)以及星像摄影机来获取像片的外方位元素;也可以利用一定数量的地面控制点,根据共线方程,反求像片的外方位元素,这种方法称为单像空间后方交会(如图1所示)。 图中,地面坐标X i、Yi、Zi和对应的像点坐标x i、yi是已知的,外方位元素XS、Y S、ZS(摄站点坐标),ψ、ω、κ(像片姿态角)是待求的。 (2)空间后方交会数学模型:空间后方交会的数学模型是共线方程, 即中心投影的构像方程: 式中X、Y、Z是地面某点在地面摄影测量坐标系中的坐标,x,y是该地面点在像片上的构像点的像片坐标,对 于空间后方交会而言它们是已知的,还有主距f是已知的。而9个方向余弦a 1,a 2,a3;b1,b 2,b 3;c 1,c2,c 3是未知的,具体表达式可以取
药房处方调配标准操作规程
药房处方调配标准操作规程 门诊药房是医院提供药物治疗服务的关键环节。处方调配工作质量,直接影响药物治疗效果。而错发药则会给患者带来心理、生理上不同程度的损害,并造成患者和医院的经济损失,也严重影响医院声誉。为进一步提高门诊药房服务水平,杜绝差错,特制定门诊药房《处方调配标准操作规程》如下: 一、基本配置 设发药窗口一个,配备收方调配和发药人员各一名,配读卡、记账用微机一台,备好足够的大小药袋、笔及其它调配发药工具。 另设用药咨询窗口一个,配备药品咨询服务人员一名。 二、人员、环境要求 1.药剂人员准时上岗开窗,佩带工号胸章,出示工号牌,仪表端正。岗上不看报、不大声喧哗、不与人闲谈、嘻戏、不干私活。 2.药剂人员应使用文明用语,语气、语调一律做到平顺、和蔼。不得态度冷漠,更不可与患者或其家属发生争吵,也不提倡微笑服务。 3.药剂人员应对每种药品的不同商品名、剂量、包装规格及一般用量用法有所掌握。 4.保持岗位环境卫生、整洁,药品严格按定位存放,不得任意堆放。发药桌面上不得留有与发药无关的物品。 5.药剂人员应经过专门上岗前培训,掌握国家药品管理的有关法律法规,以及各级行政部门关于药品使用的有关规定。 三、处方调配标准操作规程 1.收方调配 (1)收方调配人员向取药者索取处方和磁卡。辨别医保、自费相关单据是否符合要求。辨别是本人还是家属或他人代取药。 (2)审核处方完整性,包括科别、姓名、性别、年龄、日期及药名、剂型、剂量、数量和用法、合计是否清楚、正确。 (3)用电脑读卡机读取磁卡信息,对照处方姓名、药品名称、剂型、剂量、数量与电脑显示的处方信息是否一致,收费是否准确。 (4)检查所配药品之间是否存在配伍禁忌或不合理用药。对药名相近相似而
发药流程图完整
门药022:中药颗粒核对发药流程 主要依据: 1、《处方管理办法》卫生部令第53号,自2007年5月1日起施行。 关键点: “四查十对”:查处方,对科别、姓名、年龄;查药品,对药名、剂型、规格、数量;查配伍禁忌,对药品性状、用法用量;查用药合理性,对临床诊断。 “十八反十九畏”:甘草反甘遂、大戟、海藻、芫花;乌头反贝母、瓜蒌、半夏、白蔹、白芨;藜芦反人参、沙参、丹参、玄参、细辛、芍药。硫黄畏朴硝,水银畏砒霜,狼毒畏密陀僧,巴豆畏牵牛,丁香畏郁金,川乌、草乌畏犀角,牙硝畏三棱,官桂畏赤石脂,人参畏五灵脂。 “毒性”:05版药典共收载有毒中药72种。其中大毒中药10种,有毒中药38种,小毒中药24种。列入卫生部“毒性药品管理品种”范围,受《医疗用毒性药品管理办法》约束的有毒中药共28种,除此之外认定其为“有毒中药”都应慎重考虑。
门药211:住院部中药颗粒(长嘱临嘱)调剂流程 主要依据: 1、《处方管理办法》卫生部令第53号,自2007年5月1日起施行。 关键点: “四查十对”:查处方,对科别、姓名、年龄;查药品,对药名、剂型、规格、数量;查配伍禁忌,对药品性状、用法用量;查用药合理性,对临床诊断。 “十八反十九畏”:甘草反甘遂、大戟、海藻、芫花;乌头反贝母、瓜蒌、半夏、白蔹、白芨;藜芦反人参、沙参、丹参、玄参、细辛、芍药。硫黄畏朴硝,水银畏砒霜,狼毒畏密陀僧,巴豆畏牵牛,丁香畏郁金,川乌、草乌畏犀角,牙硝畏三棱,官桂畏赤石脂,人参畏五灵脂。 “毒性”:05版药典共收载有毒中药72种。其中大毒中药10种,有毒中药38种,小毒中药24种。列入卫生部“毒性药品管理品种”范围,受《医疗用毒性药品管理办法》约束的有毒中药共28种,除此之外认定其为“有毒中药”都应慎重考虑。
后方交会程序实现(c语言版)
#include for(l=0;l 1、角度测量(angle observation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB ,则: 1)当精度要求不高时: 瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。 2)当精度要求高时:——可用测回法(method of observation set )。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。 2、距离测量(distance measurement ) PSM 、PPM 的设置——测距、测坐标、放样前。 1)棱镜常数(PSM )的设置。 一般:PRISM=0 (原配棱镜),-30mm (国产棱镜) 2)大气改正数(PPM )(乘常数)的设置。 输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”(MEAS )。 3、坐标测量(coordinate measurement ) (1)功能:可测量目标点的三维坐标(X ,Y ,H )。 (2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。。。 若输入:方位角,测站坐标(,);测得:水平角和平距。则有: 方位角: 坐标: 若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有: 高程: (3)方法: 输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。 4、点位放样(Layout) (1)功能:根据设计的待放样点P 的坐标,在实地标出P 点的平面位置及填挖高度。(2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值dD 和角度差dHR 或纵向差值Δ X 和横向差值Δ Y 。 3)根据显示的dD 、dHR 或ΔX 、ΔY ,逐渐找到放样点的位置。 5、程序测量(programs ) (1)数据采集(data collecting) (2)坐标放样(layout) (3)对边测量(MLM)、悬高测量(REM)、面积测量(AREA)、后方交会(RESECTION) 等。 ( 安全管理 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 处方审核、调配、核对操作程序 (标准版) Safety management is an important part of production management. Safety and production are in the implementation process 处方审核、调配、核对操作程序(标准版) 1.目的:规范处方审核、调配、核对操作程序,保证药品质量。 2.范围:处方调配 3.责任人:处方审核人员、处方调配人员。 4.操作程序: 4.1接到处方后,由驻店执业药师审核或处方审核人员对处方进行远程审核,审核内容包括顾客的姓名、年龄、药品名称、剂型、剂量、用法、开方日期、配伍禁忌等。 4.1.1项目不齐或字迹辨认不清的,审核人员将处方交还顾客,并告知顾客找开方医生补齐或书写清楚。 4.1.2用量、用法不准确或有配伍禁忌的,审核人员将处方返还顾客,并告知顾客找开方医生更正或重新签名。 4.1.3处方所列药品本店没有的,审核人员将处方交还顾客,并告知顾客找开方医生更换其他药品。 4.1.4处方审核合格的,驻店执业药师在处方上签名,通过远程处方审核的留有处方审核人员姓名及指纹,方可将处方交调配人员。 4.2调配人员依照审核人员签名的处方核算药价。4.3顾客交款后,处方交调配人员调配。 4.4调配人员根据处方内容逐项调配。4.4.1调剂过程中如有疑问,调配人员立即向处方审核人员咨询。 4.4.2调剂完成后,调配人员在处方上签全名,将处方与药品交处方审核人员复核。 4.5处方审核人员按处方对照药品逐一进行复核。 4.5.1如有错发或数量不符,处方审核人员立即告知调配人员予以更正。 4.5.2复核无误的,交还调配人员发药。 4.6调配人员发药的同时,向顾客交待清楚药品的用法、用量、禁忌、注意事项等。 云博创意设计 MzYunBo Creative Design Co., Ltd. 程序运行环境为Visual Studio2010.运行前请先将坐标数据放在debug 下。 1.单像空间后方交会 C语言程序: #include 18.后方交会测量 后方交会通过对多个已知点的测量定出测站点的坐 标。 输入值或观测值 输出值 Ni.Ei.Zi:已知点的坐标值No.Eo.Zo:测站点的坐标值 Hi :水平角观测值 Vi :垂直角观测值 Di :距离观测值 已知点(P1) 已知点(P2) 测站点(P0) 已知点(P4) 已知点(P3) BTS-800 通过观测2-10 已知点便可计算出测站点的坐标。 当观测的已知点超过 2 个,计算N、E 坐标时将采用最小二乘法进行平差,并给出平差结果的不确定度。而Z 坐标则通过计算平均值求取。因此,观测的已知点越多,计算所得的坐标精度也就越高。 后方交会测量也可在菜单模式下选取“后方交会”来进行。 使用“后方交会”,已知点输入应按顺时针顺序输入,否则计算结果可能不准确。 49 18.1 测量两已知点求取测站坐标 操作过程操作键 1.在测量模式第三页下按【后交】进入 显示 后方交会测量功能,显示已知点坐标 输入屏幕。 在菜单模式下选取“3.后方交会”也 可以进入后方交会测量 2.输入已知点1 的坐标,每输入一行数据 按【】,输入完成后,照准已知点 1 棱镜,按【测量】进行测量。 3.测量完成后,显示测量结果,并要求输 入已知点棱镜高。【后交】 【测量】 【输入测量已知点1】 N﹤m﹥: E﹤m﹥: Z﹤m﹥: 【后方交会】 S: 557.259m ZA: 97°31′05″ HAR: 351°15′06″ 连续测量模式需按【停止】停止测量。 4.按【确定】,进入已知点2 坐标输入及测 量。 重复2-3 完成已知点2 的输入及测量。 【确定】 50 { System; System.Collections.Generic; System.Linq; System.Text; namespace 单像空间后方交会 { class Program { static void Main( string [] args) for (j = 0; j < 5; j++) if (j < 3) "请输入第 {0} 个点的第 {1} 个地面坐标: ", i + 1, j + 1); double .Parse( Console .ReadLine()); "请输入第 {0} 个点的第 {1} 个像点 坐标: ", i + 1, j - 2); double .Parse( Console .ReadLine()); Console .WriteLine(); // 归算像点坐标 (i = 0; i < 4; i++) for (j = 3; j < 5; j++) if (j == 3) zuobiao[i, j] = zuobiao[i, j] - x0; else zuobiao[i, j] = zuobiao[i, j] - y0; // 计算和确定初值 double zs0 = m * f, xs0 = 0, ys0 = 0; for (i = 0; i < 4; i++) else using using using using x0 = y0 = int x0, y0, i, j; double f, m; Console .Write( " 请输入像片比例尺: "); double .Parse( Console .ReadLine()); Console .Write( " 请输入像片的内方位元素 x0:" ); // 均以毫米为单 位 int .Parse( Console .ReadLine()); Console .Write( " 请输入像片的内方位元素 y0:" ); int .Parse( Console .ReadLine()); Console .Write( " 请输入摄影机主距 f:" ); double .Parse( Console .ReadLine()); Console .WriteLine(); // 输入坐标数据 double [,] zuobiao = new double [4, 5]; (i = 0; i < 4; i++) for Console .Write( zuobiao[i, j] = Console .Write( zuobiao[i, j] = for 空间后方交会程序 ————————————————————————————————作者:————————————————————————————————日期: ? 一. 实验目的: 掌握摄影测量空间后方交会的原理,利用计算机编程语言实现空间 后方交会外方位元素的解算。 二. 仪器用具及已知数据文件: 计算机wind ows xp 系统,编程软件(VI SUA L C ++6.0),地面控 制点在摄影测量坐标系中的坐标及其像点坐标文件shu ju.txt 。 三. 实验内容: 单张影像的空间后方交会:利用已知地面控制点数据及相应像点坐标根据 共线方程反求影像的外方位元素。 数学模型:共线条件方程式: ) (3)(3)(3) (1)(1)(1Zs Z c Ys Y b Xs X a Zs Z c Ys Y b Xs X a f x -+-+--+-+--= ) (3)(3)(3)(2)(2)(2Zs Z c Ys Y b Xs X a Zs Z c Ys Y b Xs X a f y -+-+--+-+--= 求解过程: (1)获取已知数据。从航摄资料中查取平均航高与摄影机主距;获取 控制点的地面测量坐标并转换为地面摄影测量坐标。 (2)量测控制点的像点坐标并做系统改正。 (3)确定未知数的初始值。在竖直摄影且地面控制点大致分布均匀 的情况下,按如下方法确定初始值,即: n X X S ∑=0,n Y Y S ∑=0,n Z mf Z S ∑=0 φ =ω=κ=0 式中;m为摄影比例尺分母;n为控制点个数。 (4)用三个角元素的初始值,计算个方向余弦,组成旋转矩阵R 。 (5)逐点计算像点坐标的近似值。利用未知数的近似值和控制点的地面坐标代入共 线方程式,逐点计算像点坐标的近似值(x )、(y )。 (6)逐点计算误差方程式的系数和常数项,组成误差方程式。 (7)计算法方程的系数矩阵A A T 和常数项l A T ,组成法方程式。 (8)解法方程,求得外方位元素的改正数dXs ,S dY ,s dZ ,d φ,dω,d κ。 (9)用前次迭代取得的近似值,加本次迭代的改正数,计算外方位元素的新值。 中药处方的调配流程 一按规定进行处方审核 1.首先查看患者姓名、性别、年龄、处方日期、医师签名/盖章等,项目不全则不予调配。 2.审阅处方药名、剂量、剂数、先煎、后下等书写是否规范,如有疑问立即与处方医师联系,更改之处需医师再次签名。 3.如有相反、相畏药物时不予调配,确属病情需要时经医师再次签名后方可调配。 4.当处方剂量超量时,特别是有毒剧药如制川乌、制草乌、制附子、麻黄、马钱子、细辛等超过用量,应与处方医师联系纠正或重签字后方可调配。 5.了解各种用药禁忌,如妊娠、哺乳、肝、肾功能不全、老年、体弱者等忌服的中药,必要时提示医生及患者。 二看划价 1.由于中药的别名较多,划价工作宜由中药专业人员完成。 2.经审方合格后才能划价。 3.计价方法是将每味药的剂量乘以单价得出每味药的价格,再将全方相加即得总价,以四舍五入的方法保留至分。 4.代煎药可加收煎药费。 三是调配 1.调配前再次审查相反、相畏、禁忌、毒性药剂量等,确认处方没有差错。 2.根据药物不同体积重量选用适当的戥子,一般用克戥,称取贵重或毒性药,克以下的要用毫克戥,保证剂量准确。称量前检查定盘星准。 3.一方多剂时用递减分戥法称量,每味药应逐剂回戥,特别是毒性药禁止凭主观估量,更不可随便抓配。 4.坚硬或大块的矿石、果实、种子、动物骨及胶类药,调配时应捣碎成小块或粗末入药。 5.不得将变质、发霉、虫蛀等药品调配入药。 6.为便于核对,按照处方药味顺序调配,顺序间隔摆放。 7.先煎、后下、包煎、烊化、另煎、冲服等特殊煎煮方法的药品必须单包并注明。 四是检查复核 1.复核药品与处方所开药味和剂数是否符合,有无多配、漏配、错配、掺混他药或异物等现象; 2.有无相反、相畏、妊娠禁忌和超剂量等; 3.有无变质、发霉、虫蛀、鼠咬、泛油、以生代制、未捣碎等; 4.是否将先煎、后下、包煎、烊化、另煎、冲服等特殊要求药品单包; . 5.抽查剂量准确程度,要求每剂重量差异不超过±5%,贵重药和毒性药不超过±1%。 五是发药 1.核对处方姓名和取药号牌后,询问患者开药剂数以便再次核实。 空间后交-前交程序设计 (实验报告) 姓名: 班级: 学号: 时间: 空间后交-前交程序设计 一、实验目的 用 C 、VB或MATLAB语言编写空间后方交会-空间前方交会程序 ⑴提交实习报告:程序框图、程序源代码、计算结果、体会 ⑵计算结果:像点坐标、地面坐标、单位权中误差、外方位元素及其精度 二、实验数据 f=150.000mm,x0=0,y0=0 三、实验思路 1.利用空间后方交会求左右像片的外方位元素 (1).获取m(于像片中选取两点,于地面摄影测量坐标系中选取同点,分别计算距离,距离比值即为m),x,y,f,X,Y,Z (2).确定未知数初始值Xs,Ys,Zs,q,w,k (3).计算旋转矩阵R (4).逐点计算像点坐标的近似值(x),(y) (5).组成误差方程式 (6).组成法方程式 (7).解求外方位元素 (8).检查是否收敛,即将求得的外方位元素的改正数与规定限差比较,小于限差即终止;否则用新的近似值重复步骤(3)-(7) 2.利用求出的外方位元素进行空间前交,求出待定点地面坐标(1).用各自像片的角元素计算出左、右像片的方向余弦值,组成旋转矩阵R1,R2 (2).根据左、右像片的外方位元素,计算摄影基线分量Bx,By,Bz (3).计算像点的像空间辅助坐标(X1,Y1,Z1)和(X2,Y2,Z2) (4).计算点投影系数N1和N2 (5).计算未知点的地面摄影测量坐标 四、实验过程 ⑴程序框图 函数AandL %求间接平差时需要的系数 %%%已知 %a=像点坐标x,b=像点坐标y,f内方位元素主距 %φ=q,ψ=w,κ=k %像空间坐标系X,Y,Z %地面摄影测量坐标系Xs,Ys,Zs function [A1,L1,A2,L2]=AandL(a,b,f,q,w,k,X,Y,Z,Xs,Ys,Zs) %%%%%%%%%%%选择矩阵元素 a1=cos(q)*cos(k)-sin(q)*sin(w)*sin(k); a2=-cos(q)*sin(k)-sin(q)*sin(w)*cos(k); a3=-sin(q)*cos(w); b1=cos(w)*sin(k); b2=cos(w)*cos(k); b3=-sin(w); c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k); c2=-sin(q)*sin(k)+cos(q)*sin(w)*cos(k); c3=cos(q)*cos(w); %%%%%%%共线方程的分子分母 X_=a1*(X-Xs)+b1*(Y-Ys)+c1*(Z-Zs); Y_=a2*(X-Xs)+b2*(Y-Ys)+c2*(Z-Zs); Z_=a3*(X-Xs)+b3*(Y-Ys)+c3*(Z-Zs); %%%%%%%近似值 x=-f*X_/Z_; y=-f*Y_/Z_; %%%%%%%A组成L组成 a11=1/Z_*(a1*f+a3*x); a12=1/Z_*(b1*f+b3*x); a13=1/Z_*(c1*f+c3*x); a21=1/Z_*(a2*f+a3*y); a22=1/Z_*(b2*f+b3*y); a23=1/Z_*(c2*f+c3*y); a14=y*sin(w)-(x/f*(x*cos(k)-y*sin(k))+f*cos(k))*cos(w); a15=-f*sin(k)-x/f*(x*sin(k)+y*cos(k)); a16=y; a24=-x*sin(w)-(y/f*(x*cos(k)-y*sin(k))-f*sin(k))*cos(w); a25=-f*cos(k)-y/f*(x*sin(k)+y*cos(k)); a26=-x; lx=a-x; ly=b-y; %%%%%%%%%组成一个矩阵,并返回 A1=[a11,a12,a13,a14,a15,a16]; A2=[a21,a22,a23,a24,a25,a26]; L1=lx; L2=ly; 函数deg2dms全站仪后方交会法步骤和高程测量步骤
处方审核、调配、核对操作程序(标准版)
摄影测量程序汇总(后方交会+前方交会+单模型光束法平差)
后方交会测量步骤
摄影测量学单像空间后方交会程序设计作业
空间后方交会程序
中药处方的调配流程
空间后交-前交程序设计实验报告