基于双线性插值算法的图像放缩技术与实现
线性插值算法实现图像缩放详解
线性插值算法实现图像缩放详解 在Windows中做过图像方面程序的人应该都知道Windows的GDI有?个API函数:StretchBlt,对应在VCL中是 TCanvas类的StretchDraw方法。它可以很简单地实现图像的缩放操作。但问题是它是用了速度最快,最简单但效果也是最差的“最近邻域法”,虽然在大多数情况下,它也够用了,但对于要求较高的情况就不行了。 不久前做了?个小玩意儿,用于管理我用DC拍的?堆照片,其中有?个插件提供了缩放功能,目前的版本就是用了StretchDraw,有时效果不能令人满意,我?直想加入两个更好的:线性插值法和三次样条法。经过研究发现三次样条法的计算量实在太大,不太实用,所以决定就只做线性插值法的版本了。 从数字图像处理的基本理论,我们可以知道:图像的变形变换就是源图像到目标图像的坐标变换。简单的想法就是把源图像的每个点坐标通过变形运算转为目标图像的相应点的新坐标,但是这样会导致?个问题就是目标点的坐标通常不会是整数,而且像放大操作会导致目标图像中没有被源图像的点映射到,这是所谓 “向前映射”方法的缺点。所以?般都是采用“逆向映射”法。 但是逆向映射法同样会出现映射到源图像坐标时不是整数的问题。这里就需要“重采样滤波器”。这个术语看起来很专业,其实不过是因为它借用了电子信号处理中的惯用说法(在大多数情 况下,它的功能类似于电子信号处理中的带通滤波器),理解起来也不复杂,就是如何确定这个非整数坐标处的点应该是什么颜色的问题。前面说到的三种方法:最近邻域法,线性插值法和三次样条法都是所谓的“重采样滤波器”。 所谓“最近邻域法”就是把这个非整数坐标作?个四舍五入,取最近的整数点坐标处的点的颜色。而“线性插值法”就是根据周围最接近的几个点(对于平面图像来说,共有四点)的颜色作线性插值计算(对于平面图像来说就是二维线性插值)来估计这点的颜色,在大多数情况下,它的准确度要高于最近邻域法,当然效果也要好得多,最明显的就是在放大时,图像边缘的锯齿比最近邻域法小非常多。当然它同时还带业个问题:就是图像会显得比较柔和。这个滤波器用专业术语来说(呵呵,卖弄?下偶的专业^_^)叫做:带阻性能好,但有带通损失,通带曲线的矩形系数不高。至于三次样条法我就不说了,复杂了?点,可自行参考数字图像处理方面的专业书籍,如本文的参考文献。 再来讨论?下坐标变换的算法。简单的空间变换可以用?个变换矩阵来表示: [x’,y’,w’]=[u,v,w]*T 其中:x’,y’为目标图像坐标,u,v为源图像坐标,w,w’称为齐次坐标,通常设为1,T为?个3X3的变换矩阵。 这种表示方法虽然很数学化,但是用这种形式可以很方便地表示多种不同的变换,如平移,旋转,缩放等。对于缩放来说,相当于: [Su 0 0 ] [x, y, 1] = [u, v, 1] * | 0 Sv 0 | [0 0 1 ] 其中Su,Sv分别是X轴方向和Y轴方向上的缩放率,大于1时放大,大于0小于1时缩小,小于0时 反转。 矩阵是不是看上去比较晕?其实把上式按矩阵乘法展开就是: { x = u * Su
插值法在图像处理中的运用要点
插值方法在图像处理中的应用 作者: 专业姓名学号 控制工程陈龙斌 控制工程陈少峰 控制工程殷文龙 摘要 本文介绍了插值方法在图像处理中的应用。介绍了典型的最近邻插值、双线性插值、双三次插值、双信道插值、分形插值的原理。以分形插值为重点,在图像放大领域用MATLAB进行仿真,并与其它方法的结果做了比对。指出了各种方法的利弊,期待更进一步的研究拓展新的算法以及改进现有算法。
一、引言 人类通过感觉器官从客观世界获取信息,而其中一半以上的信息都是通过视觉获得的。图像作为人类视觉信息传递的主要媒介,具有声音、语言、文字等形式无法比拟的优势,给人以具体、直观的物体形象。在数字化信息时代,图像处理已经成为重要的数据处理类型。数字图像比之传统的模拟图像处理有着不可比拟的优势。一般采用计算机处理或者硬件处理,处理的内容丰富,精度高,变通能力强,可进行非线性处理。但是处理速度就会有所不足。图像处理的主要内容有:几何处理、算术处理、图像增强、图像复原、图像重建、图像编码、图像识别、图像理解等。以上这些图像处理大体上可分为图像的像质改善、图像分析和图像重建三大部分。 日常生活中,越来越多的领域需要高分辨率图像,采用图像插值技术来提高数字图像的分辨率和清晰度,从软件方面进行改进就具有十分重要的实用价值。多媒体通信在现代网络传输中扮演重要角色,因此插值放大提高图像分辨率是一个非常重要的问题。此外,图像变换被广泛用于遥感图像的几何校正、医学成像以及电影、电视和媒体广告等影像特技处理中。在进行图像的一些几何变换时,通常都会出现输出像素坐标和输入栅格不重合的现象,也必须要用到图像插值。图像插值是图像处理中图像重采样过程中的重要组成部分,而重采样过程广泛应用于改善图像质量、进行有损压缩等,因而研究图像插值具有十分重要的理论意义和实用价值。 图像插值是一个数据再生过程。由原始图像数据再生出具有更高分辨率的图像数据。分为图像内插值和图像间插值。前者指将一幅较低分辨率的图像再生出一幅较高分辨率的图像。后者指在若干幅图像之间再生出几幅新的图像。插值过程就是确定某个函数在两个采样点之间的数值时采用的运算过程.通常是利用曲线拟合的方法进行插值算法,通过离散的输入采样点建立一个连续函数,用这个重建的函数求出任意位置处的函数值,这个过程可看作是采样的逆过程。 20世纪40年代末,香农提出了信息论,根据采样定理,若对采样值用sinc函数进行插值,则可准确地恢复原函数,于是sinc函数被接受为插值函数,也称为理想插值函数。理想插值函数有两个缺点: (1)它虽然对带限信号可以进行无错插值,但实际中带限信号只是一小部分信号。 (2)sinc函数的支撑是无限的,而没有函数既是带限的,又是紧支撑的。 为了解决这个问题,经典的办法是刚窗函数截断sinc函数,这个窗函数必须在0剑l 之间为正数,在l到2之间为负数。sinc函数对应的是无限冲激响应,不适于有限冲激相应来进行局部插值。对数字图像来说,对图像进行插值也称为图像的重采样。它分为两个步骤:将离散图像插值为连续图像以及对插值结果图像进行采样。 经典的图像插值算法是利用邻近像素点灰度值的加权平均值来计算未知像素点处的灰度值,而这种加权平均一般表现表现为信号的离散采样值与插值基函数之间的二维卷积。这种基于模型的加权平均的图像插值方法统称为线性方法。经典的插值方法有:最近邻域法,双线性插值,双三次B样条插值,双三次样条插值,sinc函数等。线性方法,它们一个共同点就是,所有这些基函数均是低通滤波器,对数据中的高频信息都具有滤除和抑制效应,因
实验5 双线性插值
实验五图像的空间变换 一、实验目的 1、学习图像空间变换,并通过实验体会空间变换的效果,对其作出分析。 2、掌握利用最邻近插值和双线性插值算法(灰度插值)实现图像的缩放。 3、掌握MATLAB编程环境中基本的图像处理函数。 二、实验要求 1.读入图像,对其利用最邻近插值和双线性插值法进行缩放变换,要求先使用IPT函数进行变换,然后自己编写函数实现; 2.对比上述得到的结果。 三、实验原理 图像的空间变换,也称几何变换或几何运算,包括图像的平移、旋转、镜像变换、转置、缩放等。几何运算可改变图像中各物体之间的空间关系,这种运算可以看成是将各物体在图像内移动。 空间变换可如下表示:设(u,v)为源图像上的点,(x,y)为目标图像上的点,则空间变换就是将源图像上(u,v)处的像素值与目标图像上(x,y)处的像素值对应起来,并具有以下关系: x=X(u,v),y=Y(u,v) (即由(u,v)计算对应(x,y))(1.1) 或u=U(x,y),v=V(x,y) (即由(x,y)计算对应(u,v))(1.2) 其中X(u,v)、Y(u,v)、U(x,y)、V(x,y)均为变换。由(1.1)对应的变换称作向前映射法也叫像素移交法,而由(1.2)对应的变换称作向后映射法也叫像素填充法,向后映射法是向前映射法的逆。 最简单的插值算法是最邻近插值,也称为零阶插值。最邻近插值算法简单,在许多情况
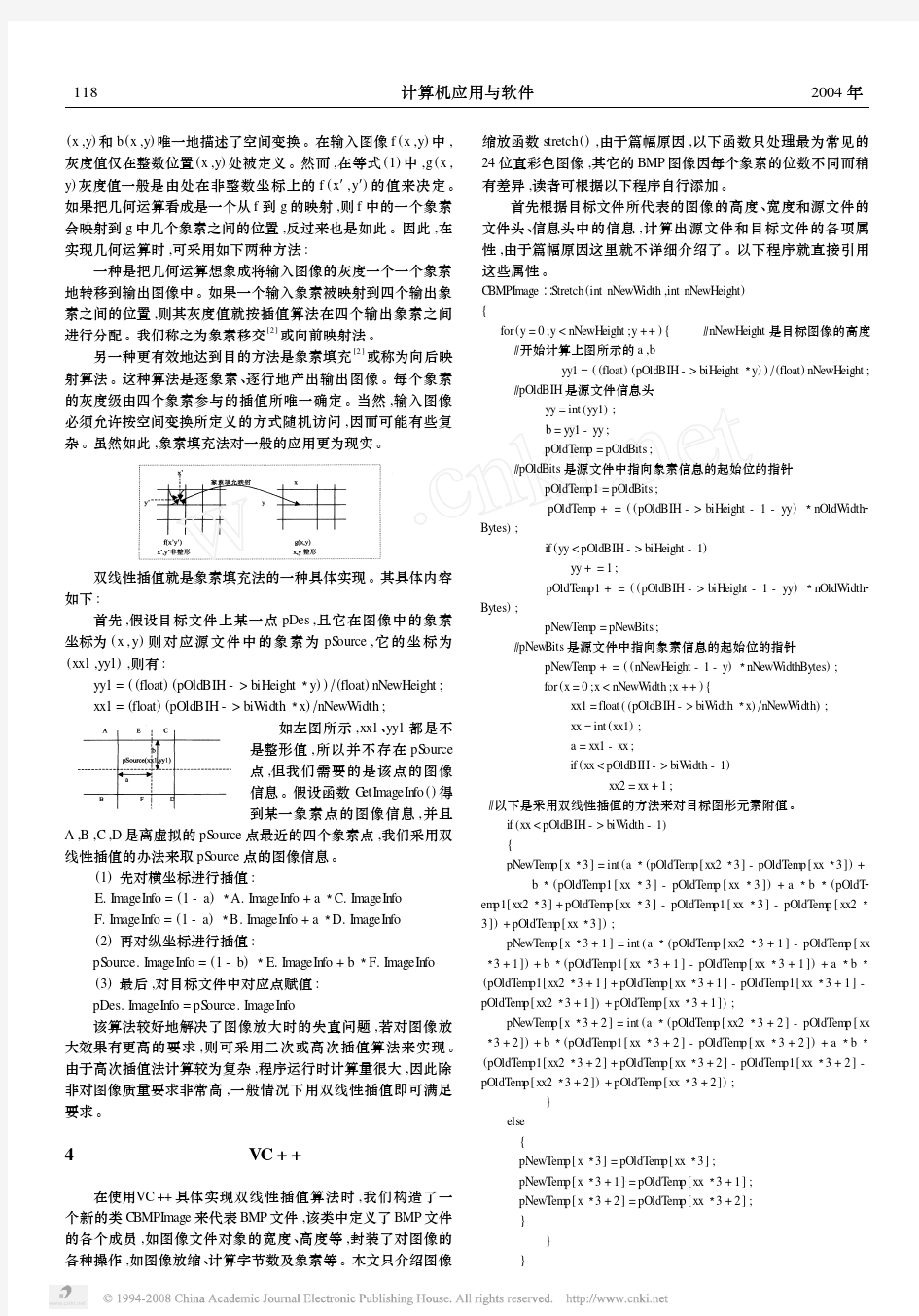
下都能得到令人满意的结果,但是当图像中包含像素之间灰度级有变化的细微结构时,最邻近算法会在图像中产生人为加工的痕迹。双线性插值算法计算量比零阶插值大,但缩放后图像质量高,不会出现像素值不连续的的情况,这样就可以获得一个令人满意的结果。最邻近点插值取插值点的4个邻点中距离最近的邻点灰度值作为该点的灰度值。设插值点(i,j)到周边4个邻点fk(i,j)(k =1,2,3,4)的距离为dk(k =1,2,3,4),则:g(i,j)=fk(i,j),dl =min{d1,d2,d3,d4},l=1,2,3,4 。 双线性插值是利用了需要处理的原始图像像素点周围的四个像素点的相关性,通过双线插值算法计算得出的。对于一个目的坐标,通过后映射法得到其在原始图像的对应的浮点坐标(i+u,j+v),其中i,j均为非负整数,u,v为[0,l]区间的浮点数,则这个像素的值f(i+u,j+v)可由原图像中坐标为(i,j)、(i+l,j)、(i,j+1)、(i+1,j+1)所对应的周围四个像素的值决定,即:f(i+u,j+v)=(1-u)×(1-v)×f(i,j)+(1-u)×v×f(i,j+1)+u×(1-v)×f(i+l,j)+u×v×f(i+l,j+1),其中f(i,j)表示源图像(i,j)处的的像素值,以此类推,这就是双线性内插值法。 如下图所示,已知(0,0)、(0,1)、(1,0)、(1,1)四点的的灰度,可以由相邻像素的灰度值f(0,0)和f(1,0)在X方向上线性插值求出(x,0)的灰度f(x,0),由另外两个相邻像素f(0,1)和f(1,1)在X方向上线性插值可求出(x,1)的灰度f(x,1),最后由f(x,0),f(x,1)在Y 方向上进行线性插值就可以得到(x,y)的灰度f(x,y)。 四、实验代码
matlab旋转+双线性插值
自己写的Matlab旋转+双线性插值图像函数效果图: 源码: clear all; I = imread('original.jpg');
[Height,Width,RGB] = size(I); II = I;%当角度为0时直接输出 %本程序是以左上角为坐标原点 %angle_j是旋转角度,正值是按顺时针旋转,负值时按逆时针旋转 angle_j = 181; %angle是弧度 angle = 2*pi*angle_j/360; %将angle转成正值 while(angle < 0) angle = 2 * pi + angle; end %约束在0-2π内 while(angle > 2 * pi) angle = angle - 2 * pi; end %tag是判断下面的while循环有没有执行过 tag = 0; while(angle > 0) %超过90度的旋转,都先旋转90度,直到角度在0°-90°之间 %原理是旋转90度整数倍时,信息是不丢失的 if angle >= pi/2 a = pi/2; angle = angle - pi/2; elseif0 < angle < pi/2 a = angle; angle = 0; end if tag == 0 tag = 1; else I = II; [Height,Width,RGB] = size(I);%在旋转后的图像上继续旋转,从而实现大于90° 的旋转 end %正向变换用 sina = sin(a); cosa = cos(a); %逆向变换用_m == _minus sina_m = sin(-a); cosa_m = cos(-a); %旋转后图像的长度和宽度 II_height = round(sina * Width + cosa * Height); II_width = round(sina * Height + cosa * Width); II = ones(II_height,II_width,3); %先转成unit8。或者下面赋值0-1规划一下。否则imshow全是白色。 II = im2uint8(II); %%%%%%%%%%%%%%%%%%%%正向映射%%%%%%%%%%%%%%%%%%%%%%%%
双线性内插值(精)
三种插值算法 最近邻插值法的 双线性内插值: 对于图像中一个目的像素,设置坐标通过反向变换得到的浮点坐标为 (i+u,j+v,其中i、j均为非负整数,u、v为[0,1区间的浮点数,则这个像素得值 f(i+u,j+v可由原图像中坐标为(i,j、(i+1,j、(i,j+1、(i+1,j+1所对应的周围四个像素的值决定,即: f(i+u,j+v = (1-u(1-vf(i,j + (1-uvf(i,j+1 + u(1-vf(i+1,j + uvf(i+1,j+1 其中f(i,j表示源图像(i,j处的的像素值,以此类推 这就是双线性内插值法。双线性内插值法计算量大,但缩放后图像质量高,不会 出现像素值不连续的的情况。由于双线性插值具有低通滤波器的性质,使高频分量受损,所以可能会使图像轮廓在一定程度上变得模糊 插值的计算方法有很多,比较常用的有最近像素插值算法、双线性插值算法、双三次插值算法和分形算法的四种。其中,最近像素插值算法是最简单的一种插值 算法,这种方法是当图片放大时,缺少的像素通过直接使用与之最接近的原有像素的颜色生成,也就是说照搬旁边的像素。如图1所示,当图片扩大时,要增加X点处的像素,由于X点与A、B这两个有效像素中的B点最接近,因此X点会直接照搬B点的像素,从而使到X点生成的效果与B点一样。虽然这种算法简单,因此处理的速度很快,但结果通常会产生明显可见的锯齿,效果往往不佳。 双线性插值算法,是指输出的图像的每个像素都是原图中四个像素运算的结果 , 由于它是从原图四个像素中运算的,因此这种算法很大程度上消除了锯齿现象,而且效果也比较好。双三次插值算法是双线性插值算法的改进算法,它输出图像的每个像素都
时域插值的几种图像放大方法
基于时域插值的几种图像放大方法 摘要:图像插值是图像比例缩放的常用方法。针对时域图像的放大问题,介绍了最邻近、双线性和双立方三种插值方法,并使用matlab 对其进行实现、分析。结果表明双立方插值得到的图像质量最高,最邻近和双线性速度较快。 1 引言 在数字图像处理中,图像的几何变换作为图像处理的基础操作之一,为图像分析提供了灵活多变的预处理模式,简化了后级处理过程,图像的几何变换还为生成特殊样式的图形提供了可能。在图像的几何变换中,图像的比例缩放是最常用的模式。图像的比例缩放是指对数字图像大小按某确定比例进行调整的过程。 对于数字图像 ),(P y x f = 则其缩放21k k ?倍的图像 ),(I 21y k x k f = 若21k k =,则I 为x 轴方向和y 轴方向等比例缩放的图像;否则,图像内的像素位置会发生相对变化,产生图像几何畸变。在本文中,讨论等比例放大图像时的情况,即 121≥=k k 由图像变换的思想,图像几何变换应当是源图像到目的图像矩阵的映射(前向映射)。前向映射时,由于系数k 为有理数,矩阵坐标为自然数的情况,此目的矩阵映射为空;同时目的矩阵存在无灰度值相对应的情况。 因此,可引入逆映射法,首先生成一个对应大小的空目的矩阵,分别计算目的矩阵每个像素点对应于原矩阵的位置,对于落在源图像两像素之间的点,可用
插值法为其映射一个灰度值,这个过程称为重采样。 重采样得出的灰度值由周围像素点的灰度和其权值特性决定,在此讨论三种常见的插值算法:最邻近(Nearest Neighbor )、双线性(Bilinear )和双立方(Bicubic )。 2 最邻近插值 最邻近插值是最简单的插值方式,它是将目的矩阵映射到源矩阵上,将其距离最近的像素点的值作为插值的值。 将目的矩阵的点),(I y x f =映射到源矩阵上, )/,/(21k y k x f 定义函数 ?????????? ?>-≤-=5 .05.0)(t t t t t t t h 图1 则目的矩阵的元素灰度值 ))/(),/((21k y h k x h f P = 在程序设计只需将转换到源矩阵的坐标四舍五入至整数 ))/(),/((21k y round k x round f P = 以4*4的像素矩阵RGB 色域为例 ??? ???????????(0,0,143) 5)(239,255,1 (0,79,255) (0,0,143)(0,79,255) (255,63,0) )(31,25,233 (127,0,0))(31,25,233 (0,0,143) (0,79,255) 5)(239,255,1)(31,25,233 (0,79,255) 5)(239,255,1 (255,63,0) 将其放大30倍,并与Matlab 库函数imresize()放大结果比较 ?? t ?? t t -
双线性插值
双线性插值,又称为双线性内插。在数学上,双线性插值是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值。例如已知的红色数据点与待插值得到的绿色点如图1所示: 图1 假如我们想得到未知函数在点的值,假设我们已知函数 在, , , 及四个点的值。首先在 x 方向进行线性插值,得到 然后在 y 方向进行线性插值,得到 这样就得到所要的结果, 如果选择一个坐标系统使得的四个已知点坐标分别为(0, 0)、(0, 1)、(1, 0) 和(1, 1),那么插值公式就可以化简为
或者用矩阵运算表示为 这就是双线性内插值法。双线性内插值法计算量大,但缩放后图像质量高,不会出现像素值 不连续的的情况。由于双线性插值具有低通滤波器的性质,使高频分量受损,所以可能会使 图像轮廓在一定程度上变得模糊。 双线性插值法的MATLAB源代码为: I=imread('lena.jpg'); %读入原图像 [nrows,ncols,z]=size(I); %读取图像矩阵大小,方便后面操作 K = str2double(inputdlg('please input scale factor (must between 0.2 - 5.0)', 'INPUT scale factor', 1, {'0.5'})); width = K * nrows; height = K * ncols; J = uint8(zeros(width,height,z)); widthScale = nrows/width; heightScale = ncols/height; for x = 5:width - 5 % 5是为了防止矩阵超出边界溢出 for y = 5:height - 5 for z=1:3 xx = x * widthScale; % xx, yy为原坐标,x,y为新坐标 yy = y * heightScale; if((xx/double(uint16(xx))==1.0)&&(yy/double(uint16(yy))==1.0)) J(x,y,z) = I(int16(xx),int16(yy),z); %若xx,yy为整数,直接赋值 else a = double(uint16(xx)); b = double(uint16(yy)); x11 = double(I(a,b,z)); % x11 <- I(a,b) x12 = double(I(a,b+1,z)); % x12 <- I(a,b+1) x21 = double(I(a+1,b,z)); % x21 <- I(a+1,b) x22 = double(I(a+1,b+1,z));% x22 <- I(a+1,b+1) J(x,y,z) = uint8((b+1-yy)*((xx-a)*x21+(a+1-xx)*x11)+(yy-b)* ((xx-a)*x22+(a+1-xx)*x12)); %用双线性插值计算公式计算 end end end end
最邻近插值和双线性插值算法的比较
最邻近插值和双线性插值算法的比较 摘要:图像缩放是数字图像处理的一个基本内容,为了更好地对数字图像细节进行描述,本文简单介绍了图像处理中的空间变换、最邻近插值算法,重点分析了双线性插值算法,并通过MATLAB仿真进行图像的缩放,比较实验结果,从而验证双线性插值算法效果较好。 关键词:图像缩放;空间变换;最邻近插值;双线性插值; 0引言 数字图像处理的对象因其涉及到社会的各个领域,倍受到越来越多的关注,而图像缩放作为数字图像处理中的基本操作尤为重要,在社会的很多领域都需要对图像进行放大和缩小。本文主要比较了空间变换、最邻近插值算法和双线性插值算法。 1图像处理中的空间变换 图像的空间变换[1],也称几何变换或几何运算,包括图像的平移、旋转、镜像变换、转置、缩放等。几何运算可改变图像中各物体之间的空间关系,这种运算可以跛看成是将各物体在图像内移动。 空间变换可如下表示:设(u,v)为源图像上的点,(x,y)为目标图像上的点,则空间变换就是将源图像上(u,v)处的颜色值与目标图像上(X,y)处的颜色对应起来 (u,v) (x,y) 并具有以下关系: x=X(u,v),y=Y(u,v) (即由(u,v)计算对应(x,y))(1) 或 u=U(x,y),v=V(x,y) (即由(x,y)计算对应(u,v))(2) 其中X(u,v)、Y(u,v)、U(x,y)、V(x,y)均为变换。由(1.1)对应的变换称作向前映射法也叫像素移交法,而由(1.2)对应的变换称作向后映射法也叫像素填充法,向后映射法是向前映射法的逆[1,4]。 对于向前映射法来说,由于许多输入像素可能映射到输出图像的边界之外,故向前映射法有些浪费,而且每个输出像素的灰度值可能要由许多输入像素的灰
图像处理之三种常见双立方插值算法
图像处理之三种常见双立方插值算法 图像处理之三种常见双立方插值算法双立方插值计算 涉及到16个像素点,其中(i’, j’)表示待计算像素点在源图像 中的包含小数部分的像素坐标,dx表示X方向的小数坐标,dy表示Y方向的小数坐标。具体可以看下图: 根据上述图示与双立方插值的数学表达式可以看出,双立方插值本质上图像16个像素点权重卷积之和作为新的像素值。其中R(x)表示插值表达式,可以根据需要选择的表达式不同。常见有基于三角取值、Bell分布表达、B样条曲线表达式。1. 基于三角形采样数学公式为 最简单的线性分布,代码实现如下:[java] view plain copy private double triangleInterpolation( double f ) { f = f / 2.0; if( f < 0.0 ) { return ( f + 1.0 ); } else { return ( 1.0 - f ); } } 2.基于Bell分布采样的数学公式如下: Bell分布采样数学公式基于三次卷积计算实现。代码实现如下:[java] view plain copy private double bellInterpolation( double x ) { double f = ( x / 2.0 ) * 1.5; if( f > -1.5 && f < -0.5 ) { return( 0.5 * Math.pow(f + 1.5, 2.0)); } else if( f > -0.5 && f < 0.5 )
数字图像处理中常用的插值方法
分类: 算法 数字图像处理中常用的插值方法 2010-11-15 14:05 在做数字图像处理时,经常会碰到小数象素坐标的取值问题,这时就需要依据邻近象如:做地图投影转换,对目标图像的一个象素进行坐标变换到源图像上对应的点时,数,再比如做图像的几何校正,也会碰到同样的问题。以下是对常用的三种数字图像 1、最邻近元法 这是最简单的一种插值方法,不需要计算,在待求象素的四邻象素中,将距离待求象
对于 (i, j+v),f(i, j) 到 f(i, j+1) 的灰度变化为线性关系,则有: f(i, j+v) = [f(i, j+1) - f(i, j)] * v + f(i, j) 同理对于 (i+1, j+v) 则有: f(i+1, j+v) = [f(i+1, j+1) - f(i+1, j)] * v + f(i+1, j) 从f(i, j+v) 到 f(i+1, j+v) 的灰度变化也为线性关系,由此可推导出待求象素灰度的计算 f(i+u, j+v) = (1-u) * (1-v) * f(i, j) + (1-u) * v * f(i, j+1) + u * (1-v) * f(i+1, j) 双线性内插法的计算比最邻近点法复杂,计算量较大,但没有灰度不连续的缺点,结性质,使高频分量受损,图像轮廓可能会有一点模糊。 3、三次内插法 该方法利用三次多项式S(x)求逼近理论上最佳插值函数sin(x)/x, 其数学表达式为: 待求像素(x, y)的灰度值由其周围16个灰度值加权内插得到,如下图:
待求像素的灰度计算式如下:f(x, y) = f(i+u, j+v) = ABC 其中:
基于MATLAB的数字图像插值算法的比较与分析
基于MATLAB的数字图像插值算法的比较与分析 摘要:本文主要讨论插值法的发展历史及现在的发展状况,插值法的主要贡献人物和现在科学中,插值法的重要性。本文首先介绍了插值法的思想和基本求解思路,随后我们在插值法中挑选了3种较有优势的插值法.进行讨论,并给出它们的数学定义和计算公式,从中我们可以看出,插值法的思想贯穿每一种插值法,然后我们运用MATLAB软件对这三种插值法进行源代码编程,在MATLAB软件中能够把这三种插值法运行出来。 关键字:最邻近点插值;双线性插值;双三次插值;Matlab 1.引言:所谓数字图像处理]就是利用计算机对图像信息进行加工以满足人的视觉心理或者应用需求的行为。实质上是一段能够被计算机还原显示和输出为一幅图像的数字码。 21世纪是一个充满信息的时代,图像作为人类感知世界的视觉基础,是人类获取信息、表达信息和传递信息的重要手段。数字图像处理即用计算机对图像进行处理,其发展历史并不长。数字图像处理技术源于20世纪20年代,当时通过海底电缆从英国伦敦到美国纽约传输了一幅照片,采用了数字压缩技术。首先数字图像处理技术可以帮助人们更客观、准确地认识世界,人的视觉系统可以帮助人类从外界获取3/4以上的信息,而图像、图形又是所有视觉信息的载体,尽管人眼的鉴别力很高,可以识别上千种颜色,但很多情况下,图像对于人眼来说是模糊的甚至是不可见的,通过图象增强技术,可以使模糊甚至不可见的图像变得清晰明亮。另一方面,通过数字图像处理中的模式识别技术,可以将人眼无法识别的图像进行分类处理。通过计算机模式识别技术可以快速准确的检索、匹配和识别出各种东西。 数字图像处理技术已经广泛深入地应用于国计民生休戚相关的各个领域。 在计算机中,按照颜色和灰度的多少可以将图像分为二值图像、灰度图像、索引图像和真彩色RGB图像四种基本类型。大多数图像处理软件都支持这四种类型的图像。 在数字图像处理中.图像插值是图像超分辨处理的重要环节。插值是一种最基本、最常用的几何运算,它不仅应用广泛,而且插值的精度直接影响最终的图像处理结果,在图像处理软件中对图像进行缩放时,插值算法的好坏直接关系到图像的失真程序.插值函数的设计是插值算法的核心问题。常采用三种插值算法:最近邻点插值、双线性插值和双三次插值。其中双三次插值的效果最好,而且这一结论也得到了普遍的公认。 2.常用图像处理插值算法的概念 数字图像的插值算法有许多应用领域.其中图像缩放是最典型的应用实例。由于图像像素的灰度值是离散的,因此一般的处理方法是对原来在整数点坐标上的像索值进行插值生成连续的曲线(面)。然后在插值曲线(面)上重新采样以获得放大或缩小图像像索的灰度值。常用的图像插值算法图像的变形变换就是源图像到目标图像的坐标变换。简单的想法就是把源图像的每个点坐标通过变形运算转为目标图像的相应点的新坐标,但是这样会导致一个问题 就是目标点的坐标通常不会是整数,而且像放大操作会导致目标图像中没有被源图像的点映 射到,这是“向前映射”方法的缺点,所以一般都是采用“逆向映射”法。但是逆向映射法同样会出现映射到源图像坐标时不是整数的问题,这里就需要“重采样滤波器”,就是如何确定这个非整数坐标处的点应该是什么颜色的问题。下面提到的两种方法:最近邻域法,线性插值法都是所谓的“重采样滤波器” 下面简要介绍目前常用的三种插值采样方法。
双线性插值-matlab实现
双线性插值算法 张俊飞一、算法简介 假设c[a]到c[a+1]之间是线性变化的,那么对于浮点数 x( a <= x < a+1) c(x) = c[a+1]*( x - a) + c[a]*( 1 + a - x); c(x) = c[a] + [ (c[a+1]-c[a])/(b-a)]*( x - a); b = a+1; c(x) = c[a] + [ c[a+1] - c[a]]*( x - a); 把这种插值方式扩展到二维情况:对于一个二维数组c, 我们假设对于任意一个浮点数i,c(a,i)到c(a+1,i)之间是线性变化的,c(i,b)到c(i,b+1)之间也是线性变化的(a,b都是整数) , 那么对于浮点数的坐标(x,y)满足(a <= x < a+1, b <= y < b+1),可以先分别求出c(x,b)和c(x,b+1): c(x,b) = c[a+1][b]*( x - a) + c[a][b]*( 1 + a - x); c(x,b+1) = c[a+1][b+1]*( x - a) + c[a][b+1]*( 1 + a - x); 现在已经知道c(x,b)和c(x,b+1)了,而根据假设c(x,b)到c(x,b+1)也是线性变化的,所以: c(x,y) = c(x,b+1)*( y - b) + c(x,b)*( 1 + b - y) 二、matlab实现 在command窗口输入chahzi('cameraman.tif',2),这里cameraman.tif为灰度图片,得到结果如下: origin image
result image 在command窗口输入chahzi('a.jpg',0.5),这里a.jpg为彩色图片,得到结果为: origin image
插值法在数字图像处理中的应用
插值法在数字图像处理中的应用 一、引言 数字图像处理的对象涉及到社会生活的许多领域。而图像的放大作为数字图像处理中的基本操作尤为重要。 插值法是一种古老的数学方法,尤其是近几十年发展起来的二维插值,是图像处理中不可或缺的方法。本文主要讨论了最近邻插值法和双线性插值法,并分别用这两种算法实现了图像的放大,从而得出这两种不同算法之间的差异。 二、插值法 (一)一维插值 已知n+1个节点(xj,yj)(j=0,1,2…n,其中xj互不相同。不妨设a=x0 (如图1),通过全部已知节点,即zi=f xi,yi ,(i=0,1,2…,n),再用,进行插值,即z= f(x,y)。 常用的插值法有最近邻插值法和双线性插值法:y?=f(x?)。 图 1.最近邻插值法 最近邻插值法就是把所求点的值与它附近的(2×?2)4个邻近的值作比较,取与它的值就近的节点的值为的插值点函数值。 在图像处理中,最近邻插值即选择离它所映射到的位置最近的输入像素的灰度值为插值结果。若几何变换后输出的图像上坐标为(x′,y′)的像素点在原图像上的对应坐标为(u,v),则近邻插值公式为:gx′,y′ =f(x,y) x=[u+0.5] y=[v+0.5] 其中[ ]表示取整。 2.双线性插值法 图像缩放的双线性内插值算法的原理解析 图像的缩放很好理解,就是图像的放大和缩小。传统的绘画工具中,有一种叫做“放大尺”的绘画工具,画家常用它来放大图画。当然,在计算机上,我们不再需要用放大尺去放大或缩小图像了,把这个工作交给程序来完成就可以了。下面就来讲讲计算机怎么来放大缩小图象;在本文中,我们所说的图像都是指点阵图,也就是用一个像素矩阵来描述图像的方法,对于另一种图像:用函数来描述图像的矢量图,不在本文讨论之列。 越是简单的模型越适合用来举例子,我们就举个简单的图像:3X3 的256级灰度图,也就是高为3个象素,宽也是3个象素的图像,每个象素的取值可以是0-255,代表该像素的亮度,255代表最亮,也就是白色,0代表最暗,即黑色。假如图像的象素矩阵如下图所示(这个原始图把它叫做源图,Source): 234 38 22 67 44 12 89 65 63 这个矩阵中,元素坐标(x,y)是这样确定的,x从左到右,从0开始,y从上到下,也是从零开始,这是图象处理中最常用的坐标系,就是这样一个坐标: ---------------------->X | | | | | ∨Y 如果想把这副图放大为4X4大小的图像,那么该怎么做呢?那么第一步肯定想到的是先把4X4的矩阵先画出来再说,好了矩阵画出来了,如下所示,当然,矩阵的每个像素都是未知数,等待着我们去填充(这个将要被填充的图的叫做目标图,Destination): ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 然后要往这个空的矩阵里面填值了,要填的值从哪里来来呢?是从源图中来,好,先填写目标图最左上角的象素,坐标为(0,0),那么该坐标对应源图中的坐标可以由如下公式得出: 机器视觉中常用图像处理算法 机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。机器视觉是使用计算机(也许是可移动式的)来模拟人的视觉,因此模拟才是计算机视觉领域的最终目标,而真正意义上的图像处理侧重在“处理”图像:如增强,还原,去噪,分割,等等,如常见的Photoshop就是功能强大的图像处理软件。大部分的机器视觉,都包含了图像处理的过程,只有图像处理过后,才能找到图像中需要的特征,从而更进一步的执行其它的指令动作。在我们实际工程应用中研究的一些图像算法,实际上是属于机器视觉,而不是纯粹的图像处理。总的来说,图像处理技术包括图像压缩,增强和复原,匹配、描述和识别3个部分,在实际工程中,这几块不是独立的,往往是环环相扣、相互辅助来达到实际效果。接下来简单介绍一下机器视觉中常用的图像处理算法。 一、滤波 滤波一般在图像预处理阶段中使用,改善图像信息,便于后续处理,当然,这不是绝对的,在图像算法过程中如果有需要,随时可以进行滤波操作。比较常用的滤波方法有以下三种: 1、均值滤波 均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点(,) x y,选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(,) g x y,即 x y,作为处理后图像在该点上的灰度值(,) 波方法可以平滑图像,速度快,算法简单。但是无法去掉噪声,只能减弱噪声。 2、中值滤波 I=imread('flower.jpg'); %读入原图像 [nrows,ncols]=size(I);%读取图像矩阵大小,方便后面操作 K = str2double(inputdlg('please input scale factor (must between 0.2 - 5.0)', 'INPUT scale factor', 1, {'0.5'})); width = K * nrows; height = K * ncols; J = uint8(zeros(width,height)); widthScale = nrows/width; heightScale = ncols/height; for x = 5:width - 5 % 5是为了防止矩阵超出边界溢出 for y = 5:height - 5 xx = x * widthScale; % xx, yy为原坐标,x,y为新坐标 yy = y * heightScale; if (xx/double(uint16(xx)) == 1.0) & (yy/double(uint16(yy)) == 1.0) J(x,y) = I(int16(xx),int16(yy));%若xx,yy为整数,直接赋值 else a = double(uint16(xx)); b = double(uint16(yy)); x11 = double(I(a,b)); % x11 <- I(a,b) x12 = double(I(a,b+1)); % x12 <- I(a,b+1) x21 = double(I(a+1,b)); % x21 <- I(a+1,b) x22 = double(I(a+1,b+1)); % x22 <- I(a+1,b+1) J(x,y) = uint8( (b+1-yy) * ((xx-a)*x21 + (a+1-xx)*x11) + (yy-b) * ((xx-a)*x22 +(a+1-xx) 对图像进行旋转,使用最近邻插值法,双线性插值,三次卷积插值三种方法进行插值。 源码: clc;clear all;close all; Img=imread('test1.bmp'); Img=double(Img); [h w]=size(Img); alpha=pi/6; %逆时针旋转的角度 wnew=w*cos(alpha)+h*sin(alpha); %新图像的宽width hnew=w*sin(alpha)+h*cos(alpha); %新图像的高heighth wnew=ceil(wnew); %取整 hnew=ceil(hnew); u0=w*sin(alpha); %平移量 T=[cos(alpha),sin(alpha);-sin(alpha),cos(alpha)]; %变换矩阵 Imgnew1=zeros(hnew,wnew); Imgnew2=zeros(hnew,wnew); Imgnew3=zeros(hnew,wnew); for u=1:hnew %u和v是新图像坐标,变换到原图像坐标x和y中。 for v=1:wnew tem=T*([u;v]-[u0;0]); x=tem(1); y=tem(2); if x>=1 & x<=h & y>=1 & y<=w %若变换出的x和y在原图像范围内 x_low=floor(x); x_up=ceil(x); y_low=floor(y); y_up=ceil(y); if (x-x_low)<=(x_up-x) %采用最近点法,选取距离最近点的像素赋给新图像x=x_low; else x=x_up; end if (y-y_low)<=(y_up-y) y=y_low; else y=y_up; end p1=Img(x_low,y_low); %双线性插值,p1到p4是(x,y)周围的四个点p2=Img(x_up,y_low); p3=Img(x_low,y_low); p4=Img(x_up,y_up); s=x-x_low; t=y-y_low; Imgnew1(u,v)=Img(x,y); Imgnew2(u,v)=(1-s)*(1-t)*p1+(1-s)*t*p3+(1-t)*s*p2+s*t*p4; end if x>=2 & x<=h-2 & y>=2 & y<=w-2 %若变换出的x和y在原图像范围内x_1=floor(x)-1; x_2=floor(x); x_3=floor(x)+1; x_4=floor(x)+2; y_1=floor(y)-1; y_2=floor(y); y_3=floor(y)+1; y_4=floor(y)+2; A=[sw(1+x-x_2),sw(x-x_2),sw(1-(x-x_2)),sw(2-(x-x_2))]; C=[sw(1+y-y_2),sw(y-y_2),sw(1-(y-y_2)),sw(2-(y-y_2))]; B=[ Img(x_1,y_1),Img(x_1,y_2),Img(x_1,y_3),Img(x_1,y_4); Img(x_2,y_1),Img(x_2,y_2),Img(x_2,y_3),Img(x_2,y_4); Img(x_3,y_1),Img(x_3,y_2),Img(x_3,y_3),Img(x_3,y_4); Img(x_4,y_1),Img(x_4,y_2),Img(x_4,y_3),Img(x_4,y_4)]; Imgnew3(u,v)=A*B*C'; end 用MATLAB 进行图像处理算法的界面设计 目录 1.设计目的 (3) 2.题目分析 (3) 3.总体设计 (3) 4.具体设计 (5) 5.结果分析 (34) 6.心得体会 (34) 7.附录代码 (36) 1、设计目的:综合运用MATLAB工具箱实现图像处理的GUI程序设计,利用MATLAB图像处理工具箱,设计和实现自己的Photoshop 。 2、题目分析 利用matlab的GUI程序设计一个简单实用的图像处理程序。该程序应具备图像处理的常用功能,以满足用户的使用。现设计程序有以下基本功能: 1)图像的读取和保存。 2)设计图形用户界面,让用户能够对图像进行任意的亮度和对比度变化调整,显示和对比变换前后的图像。 3)设计图形用户界面,让用户能够用鼠标选取图像感兴趣区域,显示和保存该选择区域。 4)编写程序通过最近邻插值和双线性插值等算法将用户所选取的图像区域进行放大和缩小整数倍的操作,并保存,比较几种插值的效果。 5)图像直方图统计和直方图均衡,要求显示直方图统计,比较直方图均衡后的效果。 6)能对图像加入各种噪声,并通过几种滤波算法实现去噪并显示结果。 7)额外功能。 3、总体设计 图一 软件的总体设计界面布局如上图所示,主要分为2个部分:显示区域与操作区域。显示区域:显示载入原图,以及通过处理后的图像。 操作区域:通过功能键实现对图像的各种处理。 在截图中可见,左部为一系列功能按键如“还原”、“撤销”、“截图”等等;界面正中部分为图片显示部分,界面中下方为系列功能切换选择组。 设计完成后运行的软件界面如下: 图二 与图一先比,运行后的界面更为简洁。 利用“编辑”菜单可调出相应的功能键。例如:图像缩放的双线性内插值算法的原理解析
常用算法简介
双线性插值Matlab程序
matlab旋转实现(最近邻值-双线性-三次卷积插值实现插值)
MATLAB中GUI在图像处理应用中的设计(包括各种算法)