第一讲 遥感影像的配准

第一讲遥感影像预处理
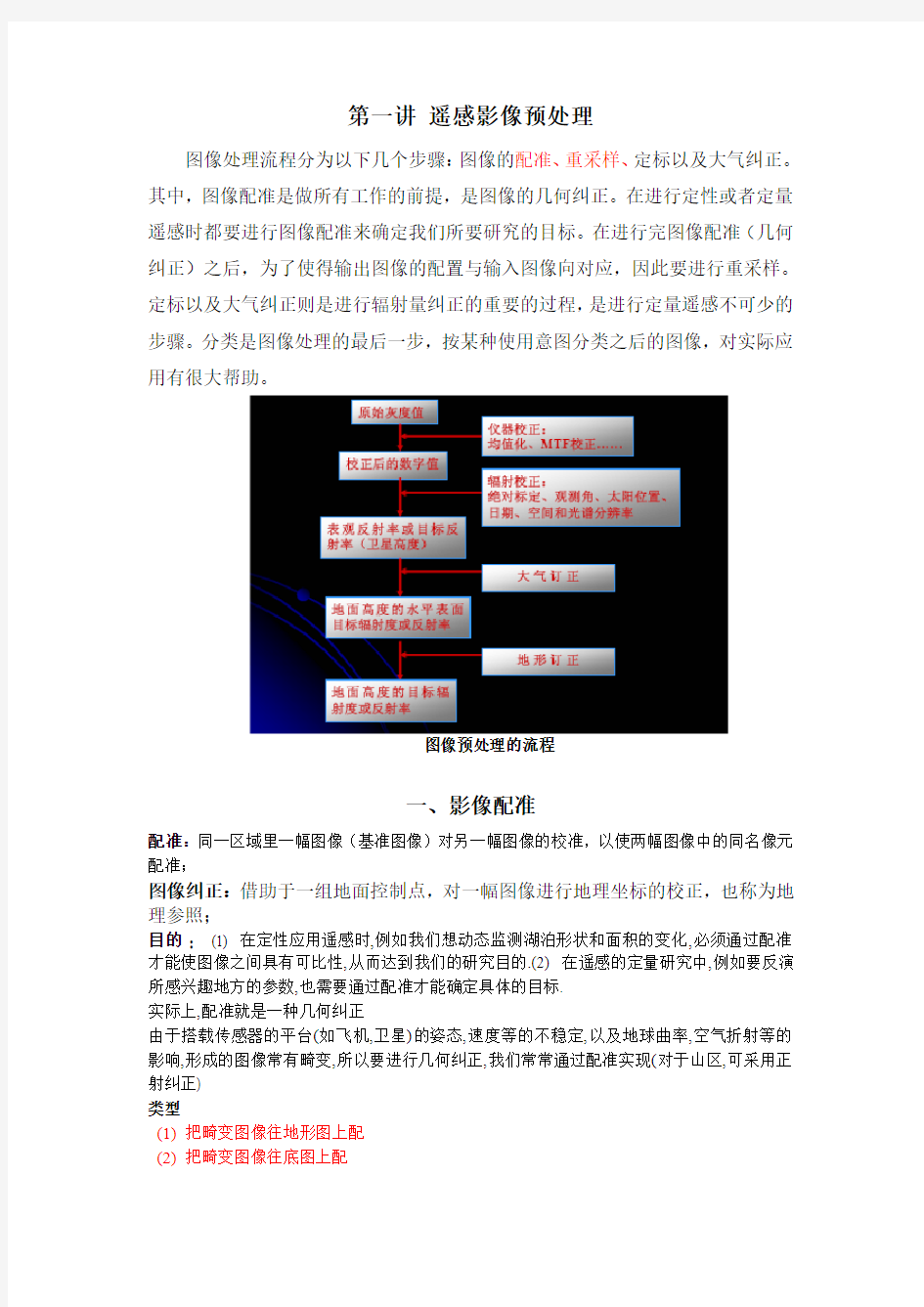
图像处理流程分为以下几个步骤:图像的配准、重采样、定标以及大气纠正。其中,图像配准是做所有工作的前提,是图像的几何纠正。在进行定性或者定量遥感时都要进行图像配准来确定我们所要研究的目标。在进行完图像配准(几何纠正)之后,为了使得输出图像的配置与输入图像向对应,因此要进行重采样。定标以及大气纠正则是进行辐射量纠正的重要的过程,是进行定量遥感不可少的步骤。分类是图像处理的最后一步,按某种使用意图分类之后的图像,对实际应用有很大帮助。
图像预处理的流程
一、影像配准
配准:同一区域里一幅图像(基准图像)对另一幅图像的校准,以使两幅图像中的同名像元配准;
图像纠正:借助于一组地面控制点,对一幅图像进行地理坐标的校正,也称为地理参照;
目的: (1) 在定性应用遥感时,例如我们想动态监测湖泊形状和面积的变化,必须通过配准才能使图像之间具有可比性,从而达到我们的研究目的.(2) 在遥感的定量研究中,例如要反演所感兴趣地方的参数,也需要通过配准才能确定具体的目标.
实际上,配准就是一种几何纠正
由于搭载传感器的平台(如飞机,卫星)的姿态,速度等的不稳定,以及地球曲率,空气折射等的影响,形成的图像常有畸变,所以要进行几何纠正,我们常常通过配准实现(对于山区,可采用正射纠正)
类型
(1)把畸变图像往地形图上配
(2)把畸变图像往底图上配
(3)把畸变图图像相互之间配
原理
(一) 多项式纠正模型:
(1)一次多项式
Xw=a0+a1*Xb+a2*Yb
Yw=b0+b1*Xb2*+bYb
(2)二次多项式
Xw=a0+a1*Xb+a2*Yb+a3*Xb^2+ a4*Yb^2+a5*Xb*Yb
Yw=b0+b1*Xb+b2*Yb+b3*Xb^2+ b4*Yb^2+b5*Xb*Yb
(3)三次多项式
Xw=a0+a1*Xb+a2*Yb+a3*Xb^2+ a4*Yb^2+a5*Xb*Yb+a6*Xb^3+a7*Yb^3+a8*Xb^2*Yb+
a9*Xb*Yb^2
Yw=b0+b1*Xb+b2*Yb+b3*Xb^2+ b4*Yb^2+b5*Xb*Yb+b6*Xb^3+b7*Yb^3+b8*Xb^2*Yb+ b9*Xb*Yb^2
求系数:
通过寻找控制点(GCP)去求系数,有几个未知数就至少要几对控制点!一次至少要3对,二次至少要6对,三次至少要10对。
有个经验式: GCP min=(t+1)(t+2)/2……其中t为多项式的次数,GCP单位为控制点的”对数”;
当然我们还可以找更多的控制点去求统计意义上的最优系数.
此外在ENVI中还提供了另外两种方法(感兴趣的可以看ENVI手册)
(二)RST(旋转、缩放和平移)
(三)三角测量
选取控制点:
在几何校正中,GCP点的选择是最重要,也是工作量最大的,对于一个精确的校正必须使用精确的地面控制点,图像中所有其它点的校正坐标均由地面控制点外推所得。被定位的地面控制点必须散布在整幅图像上,GCP点分布越均匀,数量越多,校正的可靠性越高。
我们所选的点在图像上要容易辨认,地面上最好可以实测,具有较固定的特征,不会随时间的变化而变化(例如城市的十字路口).另外在没有经过地形纠正的图像上选取控制点时,应在同一地形高度上进行(即要先消除地形的影响,可以用正射纠正).同时也可以有选择的去除一些效果不好的控制点,以达到最佳效果.RMS(均方根)误差是在用转换矩阵对一个GCP作转换时,所期望输出的坐标与实际输出的坐标之间的偏差。估算坐标和原坐标之间的差值大小代表了其每个控制点几何纠正的精度.
RMS误差用计算距离的方程求得:
x i和y i是输入的原坐标;
x r和y r是逆变换后的坐标。
通过计算每个控制点的RMS,即可检查有较大误差的地面控制点,又可得到累积的总体均方根误差.。RMS误差以坐标系统的距离来表示。如果原坐标是数据文件坐标,那么RMS 误差是用像元数的距离.例如,RMS误差是1意味着参考像元与逆转换像元之间的距离是1个像元。如果图像的某一特殊区域只有一个GCP,那么剔除它可能导致更大的误差),必要时选取新的控制点或调整旧的控制点;改变坐标变换函数式重新计算多项式的系数;重新计算RMS误差。
(1)最邻近像元法
a 不引入新的像元值,适合分类前使用;
b 有利于区分植被类型,确定湖泊浑浊程度,温度等;
c 计算简单,速度快
缺点:最大可产生半个像元的位置偏移,改变了像元值的几何连续性,原图中某些线状特征会被扭曲或变粗成块状.
(2)双线性内插法: 使用邻近4个点的像元值,按照其据内插点的距离赋予不同的权重,进
行线性内插.
优点:a图像平滑,无台阶现象。线状特征的块状化现象减少;b 空间位置精度更高
缺点:a 像元被平均,有低频卷积滤波效果,破坏了原来的像元值,在波谱识别分类分析中,会引起一些问题。b边缘被平滑,不利于边缘检测。
(3)三次卷积内插法: 使用内插点周围的16个像元值,用三次卷积函数进行内插.
优点: 高频信息损失少,可将噪声平滑,对边缘有所增强,具有均衡化和清晰化的效果
缺点: 破坏了原来的像元值,计算量大.
内插方法的选择除了考虑图像的显示要求及计算量外,在做分类时还要考虑内插结果对分类的影响,特别是当纹理信息为分类的主要信息时。
研究表明,最近邻采样将严重改变原图像的纹理信息。因此,当纹理信息为分类主要信息时,不宜选用最近邻采样。双线性内插及三次卷积内插将减少图像异质性,增加图像同质性,其中,双线性内插方法使这种变化更为明显。
这几种方法在ENVI中均是可以选择
的.
选择MAP>registration>select GCPS:image to image(因为两幅均为影像,如果一幅是图像另一
幅是地图,则选择image to map)
点击OK
控制点的颜色可以在窗口的file>preferences中修改
选好一个点后就用add point,当然不好的点还可以删掉,用hide list ,可以打开所选点的列表
从此表中,我们可以看到各点的X轴和Y轴误差,以及RMS误差,而在
选好点后,做保存
进行纠正: 选择MAP>registration>warp from GCPS:image to image 输入待纠正的图像和基准的图像
在warp method中可以选择多项式,三角测量,RST
重采样中可以选择上面介绍的三种方法
想要看看配准的结果是否好,可以使用影像窗口中的tools>link>link displays
练习:比较不同几何纠正方法(选择多项式,三角测量,RST)及
重采样方法(最邻近像元法、双线性内插法、三次卷积内插法)的差异。
ENVI遥感图像配准实验报告
ENVI遥感图像配准 一、实验目的: 1、掌握ENVI软件的基本操作和对图像进行基本处理,包括打开图像,保存图像。 2、初步了解图像配准的基本流程及采用不同校准及采样方法生成匹配影像的特点。 3、深刻理解和巩固基本理论知识,掌握基本技能和动手操作能力,提高综合分析问题的能力。 二、实验原理 (1)最邻近法 最邻近法是将最邻近的像元值赋予新像元。该方法优点是输出图像仍然保持原来图像的像元值,简单,处理速度快。缺点就是会产生半个像元位置偏移,可能造成输出图像中某些地物的不连贯。适用于表示分类或某种专题的离散数据,如土地利用,植被类型等。
双线性插方法是使用临近4个点的像元值,按照其距插点的距离赋予不同的权重,进行线性插。该方法具有平均化的滤波效果,边缘受到平滑作用,而产生一个比较连贯的输出图像,其缺点是破坏了原来的像元值,在后来的波谱识别分类分析中,会引起一些问题。 示意图: 由梯形计算公式: 故 同理 最终得:
三次卷积插法是一种精度较高的方法,通过增加参与计算的邻近像元的数目达到最佳的重采样结果。使用采样点到周围16邻域像元距离加权计算栅格值,方法与双线性插相似,先在Y 方向插四次(或X 方向),再在X 方向(或Y 方向)插四次,最终得到该像元的栅格值。该方法会加强栅格的细节表现,但是算法复杂,计算量大,同样会改变原来的栅格值,且有可能会超出输入栅格的值域围。适用于航片和遥感影像的重采样。 作为对双线性插法的改进,即“不仅考虑到四个直接邻点灰度值的影响,还考虑到各邻点间灰度值变化率的影响”,立方卷积法利用了待采样点周围更大邻域像素的灰度值作三次插值。其三次多项式表示为: 我们可以设需要计算点的灰度值f(x,y)为:
遥感图像的几何校正(配准)
遥感图像的几何校正(配准) 1.实验目的与任务: (1)了解几何校正的原理; (2)学习使用ENVI软件进行几何校正; 2.实验设备与数据: 设备:遥感图像处理系统ENVI 数据:TM数据 3 几何校正的过程: 注意:几何校正一种是影像对影像,一种是影像对地图,下面介绍的是影像对影像的配 准或几何校正。 1.打开参考影像(base)和待校正影像:分别打开,即在display#1,display#2中打开;2.在主菜单上选择map->Registration->select GCPs:image to image 3.出现窗口Image to Image Registration,分别在两边选中DISPLAY 1(左),和DISPLAY 2(右)。BASE图像指参考图像而warp则指待校正影像。选择OK! 4.现在就可以加点了:将两边的影像十字线焦点对准到自己认为是同一地物的地方, 就可以选择ADD POINT添加点了。(PS:看不清出别忘记放大)如果要放弃该点选择 右下脚的delete last point,或者点show point弹出image to image gcp list窗口,从中选择 你要删除的点,也可以进行其他很多操作,自己慢慢研究,呵呵。选好4个点后就可以 预测:把十字叉放在参考影像某个地物,点选predict则待校正影像就会自动跳转到与参 考影像相对应的位置,而后再进行适当的调整并选点。 5.选点结束后,首先把点保存了:ground control points->file->save gcp as ASCII.. 当然你没有选完点也可以保存,下次就直接启用就可以:ground control points->file->restore gcps from ASCII... 6.接下来就是进行校正了:在ground control points.对话框中选择: options->warp file(as image to map) 在出现的imput warp image中选中你要校正的影像,点ok进入registration parameters 对话框: 首先点change proj按钮,选择坐标系 然后更改象素的大小,如果本身就是你所需要大小则不用改了 最后选择重采样方法(resampling),一般都是选择双线性的(bilinear),最后的最后选择保存路径就OK了
ERDAS遥感影像配准
ERDAS遥感影像配准的操作步骤 1.在viewer模块里打开你的正确得影像。 2.点击dataprep模块,打开他下面得image geometric correction子模块, 3.选择from image file,选择你要配得图像,打开 4.在出现得set geometric model里选择第2个polyonial 5.在下面得对话框里有个polynomial order 一般选2就可以 6. 然后应用,在close那个对话框 7.在下面得对话筐里,选第一个 8.出现一个小的对话框,不用管他,点击你第一步打开得准确得图像界面,就可以配准了 9.在你得准确图像里面点击一个点,然后转到你的需要配的图象里面找与他相似的点,点击,选够6个点后,在gcp tool 那个界面里面将出现误差参数,可以看你得点是不是准确。这6个点是控制点,所以你选择时应该分散开,尽量在全图范围里找。 10.然后选择其他点越多越好 11.如果你不想那样麻烦的找,你可以在任何一幅图像上点击鼠标右键,然后选择geo。link/unlink选项,那样子的话,你只需要在一个图象里点点,机器自动给你在另一个里
面找,不过头六个点不会出现误差参数,从第七个点开始会出现误差参数,如果误差太大,你必须在修改。 12.在你配完后,在geo correction tools里面点击第3个图标就ok 13.如果你配准到中间要休息,需要保存gcp tools对话框,下次在匹配直接打开就行。 14.配准完后得总误差也就是那个rms误差必须在0.5个像元以里。这样ERDAS遥感影像配准的操作步骤工作完毕,你的图就ok
遥感影像的分类处理
摘要 在面向对象的影像分类方法中,首先需要将遥感影像分割成有意义的影像对象集合,进而在影像对象的基础上进行特征提取和分类。本文针对面向对象影像分类思想的关键环节展开讨论和研究,(1) 采用基于改进分水岭变换的多尺度分割算法对高分辨率遥感影像进行分割。构建了基于高斯尺度金字塔的多尺度视觉单词,并且通过实验证明其表达能力优于经典的词包表示。最后,在词包表示的基础上,利用概率潜在语义分析方法对同义词和多义词较强的鉴别能力对影像对象进行分析,找出其最可能属于的主题或类别,进而完成影像的分类。 近些年来,随着航空航天平台与传感器技术的高速发展,获取的遥感影像的分辨率越来越高。高分辨率遥感影像在各行业部门的应用也越来越广泛,除了传统的国土资源、地质调查和测绘测量等部门,还涉及到城市规划、交通旅游和环境生态等领域,极大地拓展了遥感影像的应用范围。因此,对高分辨率遥感影像的处理分析成为备受关注的领域之一。高分辨率遥感影像包括以下三种形式:高空间分辨率(获取影像的空间分辨率从以前的几十米提高到1 至5 米,甚至更高);高光谱分辨率(电磁波谱被不断细分,获取遥感数据的波段数从几十个到数百个);高时间分辨率(遥感卫星的回访周期不断缩短,在部分区域甚至可以连续观测)。本文所要研究的高分辨率遥感影像均是指“高空间分辨率”影像。 相对于中低分辨率的遥感数据,高空间分辨率遥感影像具有更加丰富的空间结构、几何纹理及拓扑关系等信息,对认知地物目标的属性特征更加方便,如光谱、形状、纹理、结构和层次等。另外,高分辨率遥感影像有效减弱了混合像元的影响,并且能够在较小的空间尺度下反映地物特征的细节变化,为实现更高精度的地物识别和分类提供了可能。 然而,传统的遥感影像分析方法主要基于“像元”进行,它处于图像工程中的“图像处理”阶段(见图1-1),已然不能满足当今遥感数据发展的需求。基于“像元”的高分辨率遥感影像分类更多地依赖光谱特征,而忽视影像的纹理、形状、上下文和结构等重要的空间特征,因此,分类结果会产生很严重的“椒盐(salt and pepper)现象”,从而影响到分类的精度。虽然国内外的很多研究人员针对以上缺陷提出了很多新的方法,如支持向量机(Support Vector Machine,SVM) 、纹理聚类、分层聚类(Hierarchical Clustering) 、神经网络(Neural Network, NN)等,但仅依靠光谱特征的基于像元的方法很难取得更好的分类结果。基于“像元”的传统分类方法还有着另一个局限:无法很好的描述和应用地物目标的尺度特征,而多尺度特征正是遥感信息的基本属性之一。由于在不同的空间尺度上,同样的地表空间格局与过程会表现出明显的差异,因此,在单一尺度下对遥感影像进行分析和识别是不全面的。为了得到更好的分类结果,需要充分考虑多尺度特征。 针对以上问题,面向对象的处理方法应运而生,并且逐渐成为高空间分辨率遥感影像分析和识别的新途径。所谓“面向对象”,即影像分析的最小单元不再是传统的单个像元,而是由特定像元组成的有意义的同质区域,也即“对象”;因此,在对影像分析和识别的过程
高分辨率遥感卫星介绍
北京揽宇方圆信息技术有限公司 高分辨率遥感卫星有哪些 高分辨率遥感可以以米级甚至亚米级空间分辨率精细观测地球,所获取的高空间分辨率遥感影像可以清楚地表达地物目标的空间结构与表层纹理特征,分辨出地物内部更为精细的组成,地物边缘信息也更加清晰,为有效的地学解译分析提供了条件和基础。随着高分辨率遥感影像资源日益丰富,高分辨率遥感在测绘制图、城市规划、交通、水利、农业、林业、环境资源监测等领域得到了飞速发展。 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。 一、卫星类型 (1)光学卫星:worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、ikonos、pleiades、deimos、spot1、kompsat系例、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm)、Sentinel-卫星、landsat(etm)、rapideye、alos、kompsat系例卫星、planet卫星、北京二号、高景一号、资源三号、高分一号、高分二号、环境卫星。 (2)雷达卫星:terrasar-x、radarsat-2、alos雷达卫星、高分三号卫星、哨兵卫星 (3)侦查卫星:美国锁眼卫星全系例(1960-1980) 二、卫星分辨率 (1)0.3米:worldview3、worldview4 (2)0.4米:worldview3、worldview2、geoeye、kompsat-3A (3)0.5米:worldview3、worldview2、geoeye、worldview1、pleiades
多源遥感影像配准流程
多源遥感影像综合应用的一项重要的准备工作就是影像间的配准,特别是不同类型传感器在同一地区,不同时间,不同高度获取的影像间的配准。即运用一幅纠正过的带有地理信息的影像(主影像)与一幅未纠正的影像(从影像)进行配准,获取一系列同名点位。因为主影像是正射影像,因而这些同名点是具有大地坐标的同名点。同时这些同名点可以作为参考数据(保存在配准后生成的<从影像名>.ctp 文件中)用于对其他影像进行纠正。 在ArcMap中配准影像栅格数据可以通过扫描地图、航片及卫片来获取。扫描的地图通常不包含表明影像对应于地表何处的信息。从航空相片和卫星相片上获得的位置信息往往不适合执行分析,或者与其它数据对齐显示。与其它空间数据一起使用栅格数据,需要把栅格数据对齐或配准到地图的坐标系统。 配准栅格数据定义了它的地图坐标位置,即指定了联系数据与地球上的位置的坐标系统。 配准栅格数据使它能与其它地理数据一起被查看、查询和分析。 配准流程: 1、启动ARCGIS9,用键或者在图层处点右键添加数据,将所要的图象数据 添加近来。如图所示: 2、从“视图”→“工具条”→“影象配准”将影像配准的工具条调出来,如图, , 调出工具条如下, 选择图的四个角的格网点进行配准处理,首先是左上角,如图:
使用“添加控制点”按钮添加第一个控制点,如图: 将左下角格网点放大以准确定位,如图。 点右键,输入XY坐标,根据地图格网坐标输入, 完成一个点,再按相同方法对其他三个角点配准。 4、电击查看连接表可以查看配准后的坐标残差看是否符合要求。
点击地理参考下的矫正,双线性内插,保存矫正图象。 5、将矫正后图象添加到图层覆盖矫正前的,从视图下拉菜单选择数据框属性 打开后如下: 将地图单位改为米,将坐标系统设为西安1980,
多时相遥感图像配准实验报告
Harbin Institute of Technology 多时相遥感图像配准 实验报告 课程名称:遥感信息处理导论 院系:电子与信息工程学院 姓名: 学号: 授课教师: 哈尔滨工业大学
1. 实验目的 对于通过遥感平台获取的遥感数字影像,由于扫描过程中受地球曲率、地球自转、平台姿态、扫描方式等因素的影响,所获取的图像往往会产生不同程度的几何误差,这些误差如若不经处理,对图像的后续应用如分类、目标检测等会产生很大影响。本实验的目的就是利用多项式映射和重采样等方法对两幅不同时间采集的遥感图像进行几何校正处理,从而方便从配准图像中找到不同时相内发生变化的地物目标信息。 2. 实验原理 图像的配准过程主要可以分为三个过程:控制点对选取(自动或手动)、坐标映射函数拟合、映射后像素重采样。 1) 控制点对选取 对于图像匹配过程,首先要通过控制点对建立两幅图像间的坐标联系。控制点的选取有可分为自动和手动两种方式。对于自动选取,可以采用SIFT 等算法实现;对于手动选取,需要实验人员通过目测观察的方法找到不同时相的遥感图像中的相同目标,这些控制点可以是建筑物的顶点、道路等的交叉点等或其他较容易分辨的位置。 选出控制点后将这些点的坐标信息记录下来,值得注意的是所选控制点的数量、分布情况以及精度会直接影响配准结果的精度和质量。 2) 图像几何校正 图像的配准实质上就是通过图像的几何校正,将产生几何失真的图像转换为标准的数字图像。采用的方法就是通过一定的映射函数将原图像的像素坐标转换为标准图像中的坐标 (,)u f x y = (,)v g x y = 其中(,)x y 表示原图像中的像素坐标值,(,)u v 表示参考图像中的像素坐标值。 映射函数的选择可以有多种形式,一般较为简单常用的是多项式函数,以二次多项式函数为例,映射函数的具体形式为 22 01234522 012345u a a x a y a xy a x a y v b b x b y b xy b x b y ?=+++++?=+++++? 其中,05, ,a a ,05,,b b 分别表示二次多项式横纵坐标映射函数中对应项的系 数,通过选定控制点,可以将这些系数项求解出来。 假设在两幅图像中总共选择了n 对控制点,根据n 对控制点的坐标 (,)~(,)i i i i x y u v 可以得到如下两个方程组,
高分辨率遥感影像数据一体化测图系统PixelGrid
高分辨率遥感影像数据一体化测图系统PixelGrid 北京四维空间数码科技有限公司 一、概况介绍 高分辨率遥感影像数据一体化测图系统PixelGrid(以下简称“PixelGrid”)是由中国测绘科学研究院自主研发的“十一五”重大科技成果,获得2009年度国家测绘科技进步一等奖。 为将这一重大科技成果实现产业化,2008年开始,由中国测绘科学研究院参股单位北京四维空间数码科技有限公司进行成果转化和产品化,并开展销售。 该软件是我国西部1:5万地形图空白区测图工程以及第二次全国土地调查工程的主力软件, 被誉为国产的“像素工厂”。 PixelGrid以其先进的摄影测量算法、集群分布式并行处理技术、强大的自动化业务化处理能力、高效可靠的作业调度管理方法、友好灵活的用户界面和操作方式,全面实现了对卫星影像数据、航空影像数据以及低空无人机影像数据的快速自动处理,可以完成遥感影像从空中三角测量到各种比例尺的DEM/DSM、DOM等测绘产品的生产任务。 PixelGrid软件主界面。 二、主要特点 PixelGrid系统以现代摄影测量与遥感科学技术理论为基础,融合计算机技术和网络通讯技术,采用基于RFM通用成像模型的大范围遥感影像稀少或无控制区域网平差、基于旋转/缩放不变性特征多影像匹配的高精度航空影像自动空三、基于多基线/多重特征的高精度DEM/DSM自动提取、等高线数据半自动采集及网络分布式编辑、基于地理信息数据库等多源控制信息的高效影像地图制作、基于松散耦合并行服务中间件的集群分布式并行计算等一系列核心关键技术,是中国测绘科学研究院研制的一款类似“像素工厂”(ISTAR PixelFactoryTM)的新一代多源航空航 天遥感数据一体化高效能处理系统。
改进CV模型在高分辨率遥感影像分割中的应用
改进CV模型在高分辨率遥感影像分割中的应用 许文宁;梅树立;王鹏新;杨勇 【期刊名称】《农业机械学报》 【年(卷),期】2011(042)003 【摘要】An improved CV model was presented according to the characters and the segmentation requirements of the remote sensing images. The correctness of the improved model was validated by the experiment. The results show that the new method can improve calculation efficiency effectively. Beside this, a continuous and closed boundary curve of the target objects can be obtained at the same time. Therefore, the land cover can be identified precisely with the help of the geometrical characteristic of the segmentation boundary.%针对遥感图像的特点及分割要求给出了一种CV简化模型,并对改进模型的正确性进行了实验验证.实验结果表明,该方法不但提高了运算速度,而且能够得到连续封闭的目标地物矢量数据,因此可方便地利用分割边界的几何特征实现地物目标的精确识别.【总页数】4页(180-183) 【关键词】遥感图像;区域分割;CV模型;应用 【作者】许文宁;梅树立;王鹏新;杨勇 【作者单位】中国农业大学信息与电气工程学院,北京,100083;中国农业大学信息与电气工程学院,北京,100083;中国农业大学信息与电气工程学院,北京,100083;中国农业机械化科学研究院,北京,100083 【正文语种】中文
(完整版)卫星图像处理流程
卫星图像处理流程 一.图像预处理 1.降噪处理 由于传感器的因素,一些获取的遥感图像中,会出现周期性的噪声,我们必须对其进行消除或减弱方可使用。 (1)除周期性噪声和尖锐性噪声 周期性噪声一般重叠在原图像上,成为周期性的干涉图形,具有不同的幅度、频率、和相位。它形成一系列的尖峰或者亮斑,代表在某些空间频率位置最为突出。一般可以用带通或者槽形滤波的方法来消除。 消除尖峰噪声,特别是与扫描方向不平行的,一般用傅立叶变换进行滤波处理的方法比较方便。 图1 消除噪声前
图2 消除噪声后 (2)除坏线和条带 去除遥感图像中的坏线。遥感图像中通常会出现与扫描方向平行的条带,还有一些与辐射信号无关的条带噪声,一般称为坏线。一般采用傅里叶变换和低通滤波进行消除或减弱。 图3 去条纹前
图4 去条纹后 图5 去条带前
图6 去条带后 2.薄云处理 由于天气原因,对于有些遥感图形中出现的薄云可以进行减弱处理。 3.阴影处理 由于太阳高度角的原因,有些图像会出现山体阴影,可以采用比值法对其进行消除。二.几何纠正 通常我们获取的遥感影像一般都是Level2级产品,为使其定位准确,我们在使用遥感图像前,必须对其进行几何精纠正,在地形起伏较大地区,还必须对其进行正射纠正。特殊情况下还须对遥感图像进行大气纠正,此处不做阐述。 1.图像配准 为同一地区的两种数据源能在同一个地理坐标系中进行叠加显示和数学运算,必须先将其中一种数据源的地理坐标配准到另一种数据源的地理坐标上,这个过程叫做配准。(1)影像对栅格图像的配准 将一幅遥感影像配准到相同地区另一幅影像或栅格地图中,使其在空间位置能重合叠加显示。
几种典型高分辨率商业遥感卫星系统
几种典型高分辨率商业遥感卫星系统 1.2.1 IKONOS卫星系统 1.基本情况 IKONOS是空间成像公司(Space Imaging)为满足高解析度和高精度空间信息获取而设计制造,是全球首颗高分辨率商业遥感卫星。IKONOS-1于1999年4月27日发射失败,同年9月24日,IKONOS-2发射成功,紧接着于10月12日成功接收到第一幅影像。 IKONOS卫星由洛克希德—马丁公司(Lockheed Martin)制造,重1600lb,由Athena II 火箭于加利福尼亚州的范登堡空军基地发射成功,卫星设计寿命为7年。它采用太阳同步轨道,轨道倾角98.1o,平均飞行高度681km,轨道周期98.3min,通过赤道的当地时间为上午10:30,在地面上空平均飞行速度为6.79km/s,卫星平台自身高1.8m,直径1.6m。 IKONOS卫星的传感器系统由美国伊斯曼—柯达公司(Eastman Kodak)研制,包括一个1m分辨率的全色传感器和一个4m分辨率的多光谱传感器,其中的全色传感器由13816个CCD单元以线阵列排成,CCD单元的物理尺寸为12μm x 12μm,多光谱传感器分四个波段,每个波段由3454个CCD单元组成。传感器光学系统的等效焦距为10m,视场角(FOV)为0.931o,因此当卫星在681km的高度飞行时,其星下点的地面分辨率在全色波段最高可达0.82m,多光谱可达3.28m,扫描宽度约为11km。传感器可倾斜至26o立体成像,平均地面分辨率1m左右,此时扫描宽度约为13km。IKONOS的多光谱波段与Landsat TM的1—4波段大体相同,并且全部波段都具有11位的动态范围,从而使其影像包含更加丰富的信息。 IKONOS卫星载有高性能的GPS接收机、恒星跟踪仪和激光陀螺。GPS数据经过后处理可提供较精确的星历信息;恒星跟踪仪用以高精度确定卫星的姿态,其采样频率低;激光陀螺则可高频地测量成像期间卫星的姿态变化,短期内有很高的精度。恒星跟踪数据与激光陀螺数据通过卡尔曼滤波能提供成像期间卫星较精确的姿态信息。GPS接收机、恒星跟踪仪和激光陀螺提供的较高精度的轨道星历和姿态信息,保证了在没有地面控制的情况下,IKONOS卫星影像也能达到较高的地理定位精度。 2.成像原理 与Landsat和SPOT-4卫星相比,IKONOS卫星的成像方式更加灵活,其传感器系统采用独特的机械设计,可以十分灵活地以任意方位角成像,偏离正底点的摆动角甚至可达到60o。IKONOS卫星360o的照准能力使其既可侧摆成像以获取异轨立体或缩短重访周期,也可通过沿轨道方向的前后摆动同轨立体成像,具有推扫、横扫成像能力。 IKONOS卫星能获取同轨立体影像。当卫星接近目标时,传感器光学系统先沿着轨道向前倾斜,照准目标区域并采集第一幅影像,接着控制系统操纵传感器向后摆动,大约100s 后再次照准目标区并采集第二幅影像,如图1.1所示。由于IKONOS卫星利用单线阵CCD 传感器,通过光学系统的前后摆动实现同轨立体成像。因此,相应的立体覆盖是不连续的。
SIFT算法优化及其用于遥感影像自动配准
第34卷第10期2009年10月武汉大学学报#信息科学版 Geo matics and Informat ion Science of W uhan U niver sity Vo l.34N o.10 Oct.2009 收稿日期:2009-08-10。 项目来源:湖北省自然科学基金资助项目(2008CDB388);湖北省教育厅自然科学基础研究资助项目(G200514001);国家863计划 资助项目(2007AA120203)。 文章编号:1671-8860(2009)10-1245-05文献标志码:A SIFT 算法优化及其用于遥感影像自动配准 李芳芳1 肖本林2 贾永红1 毛星亮 3 (1 武汉大学遥感信息工程学院,武汉市珞喻路129号,430079)(2 湖北工业大学土木工程与建筑学院,武汉市李家墩1村,430068)(3 中共湖南省委互联网新闻宣传办公室,长沙市韶山路1号,410011) 摘 要:对传统SIF T 算法从特征点提取时间和匹配精度上进行了优化,基于优化算法提取的特征点对构建三角网进行小面元微分纠正配准。试验结果表明,该方法是一种有效的遥感影像自动配准方法。关键词:SIFT 算法;小面元微分纠正;影像配准中图法分类号:P237.3 近几年来,SIFT (scale invariant feature tr ansform )特征在图像匹配领域取得了巨大成功,基于SIFT 描述子的匹配方法已被成功应用到了很多领域,如目标识别[1]、全景图拼接[2]、从运动恢复结构[3] 等。SIFT 算法最初由Low e [4,5] 于1999年提出,2004年总结完善。2005年, Mikolajczyk 等[6]针对不同的场景,对光照变化、 图像几何变形、分辨率差异、旋转、模糊和图像压缩等6种情况,就多种最具代表性的描述子进行了试验,结果表明SIFT 描述子性能最好。 然而,目前将SIFT 算法应用于遥感影像配准的研究还较少。主要原因如下:特征点提取方面,由于遥感影像数据量一般较大,加上SIFT 算法本身复杂度较高,直接加以应用算法效率较低;特征点匹配方面,传统SIFT 算法采用的是Low e 提出的最近邻次近邻距离比值法,阈值凭经验选取,精确度较低。 1 SIFT 算法 SIFT 算法是一种提取图像局部特征的算法。通过在高斯差分尺度空间(difference of g auss-i an,DOG)寻找极值点作为关键点,提取尺度、亮 度、旋转不变量。 1.1 关键点检测及精确定位 关键点检测在多尺度空间完成。尺度空间理论最早出现于计算机视觉领域,其目的是模拟图像数据的多尺度特征。一幅二维图像的尺度空间定义为: L (x ,y ,R )=G(x ,y ,R )I (x ,y ) (1) 式中,G(x ,y ,R )= 12P R 2e -(x 2+y 2)/2R 2 是尺度可变高斯函数。为了有效检测到关键点,Low e [5] 提出了在高斯差分尺度空间寻找极值点:D(x ,y ,R )=(G(x ,y ,k R )-G(x ,y ,R ))I (x ,y) (2) 每一个采样点和它同尺度的8邻域点以及上下相邻尺度的18邻域点比较是否为极值点,作为关键点候选点。 然后,通过拟合泰勒公式展开的三维二次函数,精确定位关键点的位置和尺度。同时去除低对比度的关键点和不稳定的边缘响应点,以增强匹配稳定性,提高抗噪能力。1.2 关键点方向分配及描述子构造 利用关键点邻域像素的梯度方向分布特性为每个关键点分配方向参数。一个关键点可能会被指定多个方向(一个主方向、一个以上辅方向)以增强匹配的鲁棒性。 然后以关键点为中心取16像素@16像素的
遥感图像处理 图像配准、图像裁剪 实验报告
Lab3 geometric correction and projection transformation of remotely sensed data Objective : The purpose of the current lab section is to adequately understand the mathematic principles and methods of geometric correction (co-registration) and projection transformation . In addition,you guys need to gain hands-on experience or skill to perform them in ENVI and ERDAS environments. 实验过程: 一、envi中图像配准 1、根据控制点的坐标对图像进行配准 1)加载中山陵地形图 2) 选择map 菜单下的registration菜单,选择select gcps:image to map 设置投影信息:基于经纬度的投影(geographic lat/lon),选择基准面为WGS—84
3)开始配准 依次移动一级窗口中的光标到四个图廓点的位置,在三级放大窗口中把十字司放在经纬线的交点的中间位置,输入该点的经纬度于编辑对话框中:
点击add point,完成对控制点的编辑 4)选择option菜单下的wrap file将配准好的地图生成一幅新的影像
修改生成图像信息,改为50带的UTM投影,基准面为WGS-84,保存 2、图像到图像的配准 1)加载全色波段影像作为待配准的影像
高空间分辨率遥感影像分割方法研究综述
高空间分辨率遥感影像分割方法研究综述 高空间分辨率遥感影像分割方法研究综述 刘建华毛政元 (福州大学,空间数据挖掘与信息共享教育部重点实验室,福建省空间信息工程研究中心,福州350002) 摘要:遥感影像分割是指把一幅影像划分为互不重叠的一组区域的过程,它要求得到的每个区域的内部具有某种一致性或相似性,而任意两个相邻的区域则不具有此种相似性。遥感影像分割是面向对象的遥感影像数据挖掘与应用中的一项关键技术,对于影像目标信息自动化提取与智能识别尤为重要,在面向对象的遥感影像处理工程中具有重要意义。本文对常见的高空间分辨率遥感影像分割方法与应用策略进行了分析,比较了各种分割方法的应用范围、优缺点及目前存在的改进措施。建立了面向对象的遥感影像分割方法的分类体系,最后指出了面向对象的遥感影像分割方法目前所存在的问题及应用前景。 关键词:高空间分辨率遥感影像影像分割方法应用策略进展 A Survey on High Spatial Resolution Remotely Sensed Imagery Segmentation Techniques and Application Strategy Liu Jian hua Mao zheng yuan (Fuzhou University, Spatial Information Research center, Fuzhou, 350002) Abstract: Remotely sensed imagery segmentation is a process of dividing an image into different regions such that each region is, but the union of any two adjacent regions is not, homogeneous. It is one of key techniques in the object-oriented remotely sensed imagery data mining and its application, also quite essential in remote sensing image processing engineering. In this paper, we have a rough survey on different methods of high spatial resolution remotely sensed imagery segmentation, categorizing them into four groups according to the gray or color information they are exploiting. The disadvantage of current methods and the proper progress which can be attained in the near future are pointed out at the end of this essay. Keywords: High Spatial Resolution Imagery, Segmentation methods, application strategy, advances and prospects 1 引言 高空间分辨率遥感影像(如GeoEye、WorldView、QuickBird、IKONOS等,本文简称高分影像)在诸多领域(地形图更新、地籍调查、城市规划、交通及道路设施、环境评价、精细农业、林业测量、军事目标识别和灾害评估等)得以广泛应用[1]。目前,影像信息提取自动化程度低是高分影像应用潜力得不到充分发挥的主要限制因素,是理论和应用研究中必须突破的瓶颈。 遥感影像分割是面向对象的遥感影像分析方法[2]的基础和关键,在遥感影像工程中处于影像处理与影像理解的中间环节,是面向对象的影像分析理论研究的突破口。按照一般的影像分割定义[3],分割出的影像对象区域需同时满足相似性和不连续性两个基本特性;其中相似性指该影像对象内的所有像元点都满足基于灰度、色彩、纹理等特征的某种相似性准则,不连续性是指影像对象的特征在区域边界处的不连续性。迄今为止,将计算机视觉领域的图像分割算法应用于图像分割过程中,已开展了较多的研究[4-7],并提出了大量的算法;但针对遥感影像尤其是高分影像的分割方法较少[8],仍不成熟。这是由于与其它类型图像的分割相比,高分影像分割难度更大,也更具挑战性。具体体现在高分影像其空间分辨率高、纹理信息丰富而光 基金项目: 国家重点基础研究发展计划项目(973)子课题“高空间分辨率遥感影像自适应数据挖掘方法研[2006CB708306]”,国家自然科学基金项目“基于场模型的自适应空间聚类方法研究[40871206]”。 作者简介: 刘建华,男,博士研究生,曾从事GIS与RS教学工作。目前主要研究方向为空间数据挖掘、遥感图像处理以及GIS与RS集成等。E-mail:sirc.liujh@https://www.360docs.net/doc/c49180190.html,。
卫星遥感数据处理规范流程
北京揽宇方圆信息技术有限公司遥感卫星影像图像数据处理介绍 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。 优势: 1:北京揽宇方圆国内老牌卫星数据公司,经营时间久,行业口碑相传,1800个行业用户选择的实力见证。 2:北京揽宇方圆遥感数据购买专人数据查询一对一服务,数据查询网址是卫星公司网。 3:北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。
4:北京揽宇方圆国家高新技术企业,通过ISO900认证的国际质量管理操作体系,无论是遥感卫星品质和遥感数据处理质量,都能得到保障。 5:影像数据官方渠道:所有的卫星数据都是卫星公司授权的原始数据,全球公众数据查询网址公开查询,影像数据质量一目了然,数据反应客观公正实事求是,数据处理技术团队国标规范操作,提供的是行业优质的专业化服务。 6:签定正规合同:影像数据服务付款前,买卖双方须签订服务合同,提供合同相应的正规发票,发票国家税网可以详细查询,有增值税普通发票和增值税专用发票两种发票类型可供选择。以最有效的法律手段来保障您的权益。 7:对公帐号转款:合同约定的对公帐号,与合同主体名发票上面的帐号名称一致,是由工商行政管理部门核准的公司银行账户,所有交易记录均能查询,保障资金安全。 8:售后服务:完善的售后服务体制,全国热线,登陆官网客服服务同步。 技术能力说明 北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。 一.图像预处理 1.降噪处理 由于传感器的因素,一些获取的遥感图像中,会出现周期性的噪声,我们必须对其进行消除或减弱方可使用。 (1)除周期性噪声和尖锐性噪声 周期性噪声一般重叠在原图像上,成为周期性的干涉图形,具有不同的幅度、频率、和相位。它形成一系列的尖峰或者亮斑,代表在某些空间频率位置最为突出。一般可以用带通或者槽形滤波的方法来消除。 消除尖峰噪声,特别是与扫描方向不平行的,一般用傅立叶变换进行滤波处理的方法比较方便。
高分辨率卫星影像卫星参数表
北京揽宇方圆信息技术有限公司 表1:商业光学高分辨率卫星参数一览表
北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。
优势: 1:北京揽宇方圆国内老牌卫星数据公司,经营时间久,行业口碑相传,1800个行业用户选择的实力见证。 2:北京揽宇方圆遥感数据购买专人数据查询一对一服务,数据查询网址是卫星公司网。 3:北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。 4:北京揽宇方圆国家高新技术企业,通过ISO900认证的国际质量管理操作体系,无论是遥感卫星品质和遥感数据处理质量,都能得到保障。 5:影像数据官方渠道:所有的卫星数据都是卫星公司授权的原始数据,全球公众数据查询网址公开查询,影像数据质量一目了然,数据反应客观公正实事求是,数据处理技术团队国标规范操作,提供的是行业优质的专业化服务。 6:签定正规合同:影像数据服务付款前,买卖双方须签订服务合同,提供合同相应的正规发票,发票国家税网可以详细查询,有增值税普通发票和增值税专用发票两种发票类型可供选择。以最有效的法律手段来保障您的权益。 7:对公帐号转款:合同约定的对公帐号,与合同主体名发票上面的帐号名称一致,是由工商行政管理部门核准的公司银行账户,所有交易记录均能查询,保障资金安全。 8:售后服务:完善的售后服务体制,全国热线,登陆官网客服服务同步。 技术能力说明 北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。
遥感图像配准
1.实习目的:遥感图像的配准 2.实习内容: 2.1掌握ENVI自定义坐标,以及基于地形图的遥感影像配准过程。 2.2本次实习中带有地理坐标的西安市城区地形图被用作基准影像,对资源三号全色影像进行配准。在此基础上,以纠正后的全色影像为基准,校正资源三号多光谱影像,用于下节的图像融合。 3.实习步骤: 3.1 基于地形图配准全色影像的具体操作步骤: 3.1.1 打开并显示资源三号全色影像与地形图 1)从ENVI主菜单中,选择File → Open Image File。加载地形图文件和全色影像到可用波 段列表Available Bands List中; 2)点击Load RGB将地形图加载到显示窗口display#1; 3)在可用波段列表Display #1下拉菜单,点击New Display按钮,并从下拉式菜单中选 择New Display。点Load RGB按钮,将全色影像加载到一个新的显示窗口display#2。 3.1.2 修改地形图头文件中的地图信息 由于地形图为西安80坐标系,而ENVI系统自带的投影文件中并没有相关基准面和椭球体,因此打开的地形图无法正确显示地图信息Map Info; 1)定义椭球体,进入ENVI安装目录:C:\Program Files\ITT\IDL71\products\envi47\ map_proj, 打开椭球体文件ellipse.txt,在最后一行增加IAG-75,6378140.0, 6356755.3; 2)定义基准面,在相同的目录,打开基准面文件datum.txt文件,在最后一行增加 D_Xian_80,IAG-75,0,0,0; 3)在可用波段列表中,右键点击地形图文件,选择Edit Header,从弹出的窗口的Edit Attributes的下拉箭头中选择Map Info,进入Edit Map Information。输入图像左上角XY 坐标与像素大小;选择Change Proj,新建投影,输入相关参数 3.1.3影像配准 1)从ENVI主菜单栏中,选择Map → Registration → Select GCPs: Image to Image; 2)在Image to Image Registration对话框中,点击并选择Display #1 (地形图),作为Base Image。点击Display #2(全色影像),作为Warp Image。 3)点击OK,启动配准程序。通过将光标放置在两幅影像的相同地物点上,来添加单独的 地面控制点。 4)当选好同名点后,在Ground Control Points Selection对话框中,点击Add Point,把该地 面控制点添加到列表中。点击Show List可以查看地面控制点列表。当选好三个点后,Ground Control Points Selection对话框中Predict将自动激活可用,然后可以在基准影像上选好一个控制点后,点击Predict后,系统会自动定位后待校正的全色影像的相同位置,此时可以微调,满足要求后即可将该点添加到地面控制点列表。也可以勾选Ground