5800程序及方位角及距离计算
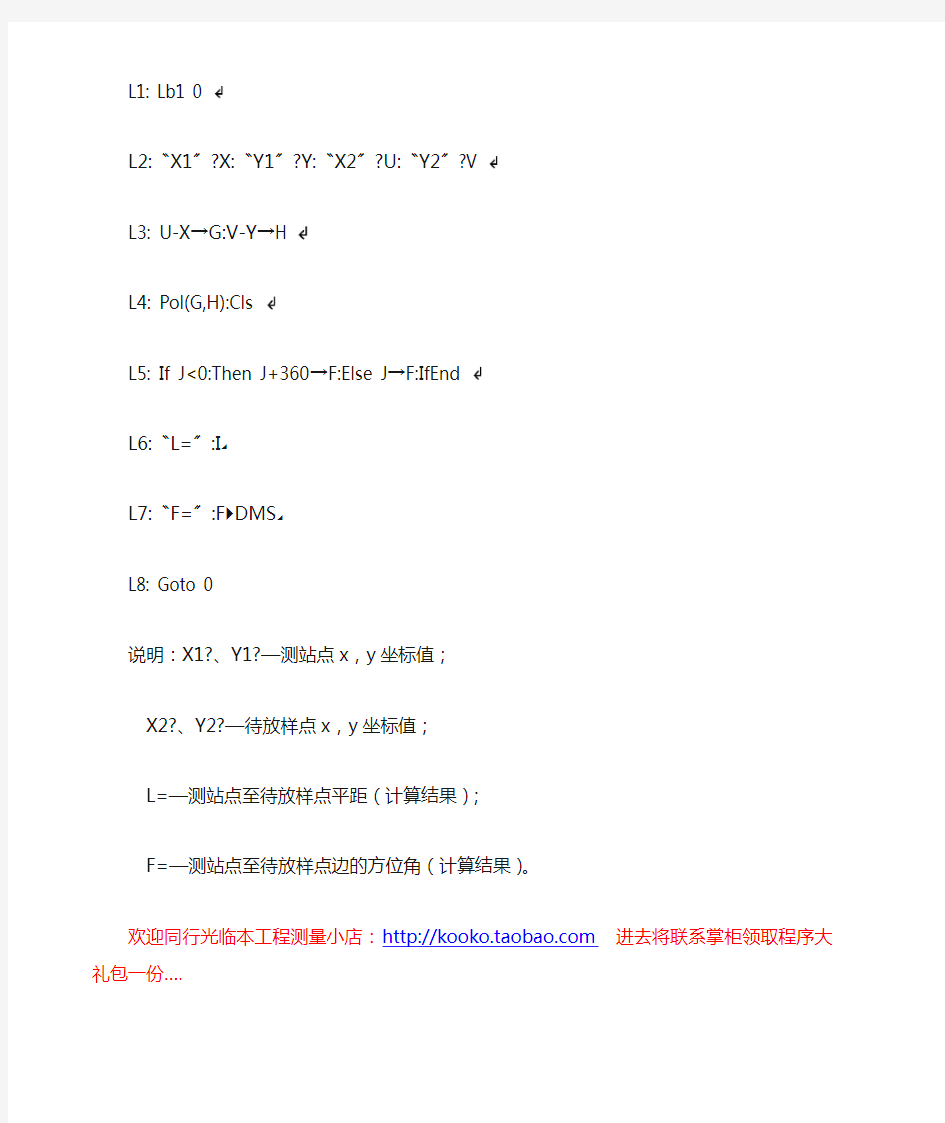

L1: Lb1 0
L2:〝X1〞?X:〝Y1〞?Y:〝X2〞?U:〝Y2〞?V
L3: U-X→G:V-Y→H
L4: Pol(G,H):Cls
L5: If J<0:Then J+360→F:Else J→F:IfEnd
L6:〝L=〞:I◢
L7:〝F=〞:F DMS◢
L8: Goto 0
说明:X1?、Y1?—测站点x,y坐标值;
X2?、Y2?—待放样点x,y坐标值;
L=—测站点至待放样点平距(计算结果);
F=—测站点至待放样点边的方位角(计算结果)。
欢迎同行光临本工程测量小店:https://www.360docs.net/doc/d17605226.html,进去将联系掌柜领取程序大礼包一份….
EXCEL中计算方位角距离公式
EXCEL中计算方位角距离公式 电子表格中求方位角的公式 结果显示为度格式的计算式: =(PI()*(1 - SIGN(B3-$B$1) / 2) - ATAN((A3-$A$1) /(B3-$B$1)))*180/PI()&"°" Excel 中求方位角公式:a1,b1放起始点坐标a3,b3放终点坐标。 结果显示为度分秒格式的计算式: =INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180/PI()) &"°"& INT( ((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180 /PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180/ PI()))*60)&"′"&INT( (((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3- $b$1)))*180/PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3- $b$1)))*180/PI()))*60-INT(((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) / (B3-$b$1)))*180/PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) / (B3-$b$1)))*180/PI()))*60))*600)/10 &"″" 其中:A1,B1中存放测站坐标,a3,b3放终点坐标。 上面的计算出来的是度分秒格式,也就是字符串格式,不能用来计算,只是用来看的哟! 下面这个简单一点: =(PI()*(1 - SIGN(B3-B1) / 2) - ATAN((A3-A1) /(B3-B1)))*180/PI() Excel 中求方位角公式:a1,b1放起始点坐标a3,b3放终点坐标。 求距离公式: =Round(SQRT(POWER((A3-$A$1),2)+POWER((B3-$B$1),2)),3) 一、度分秒值换算为度 首先要将单位符号都去掉,形成1112233 的形式,分秒小于十的要在其前补0,必须如此,不然无法判断分与秒的位置。 假设原始数据在A列,第一个数据在A2单元格。 在你需要放入转换结果的一个单元格内(最好是与A2同一行,这样有大量原始数据要转换时,直接下拉就可以转换所有数据),输入: =value(MID(IF(LEN(A2)=6,CONCATENATE("0",A2),A2),1,3))+value(MID(IF(LEN(A2)=6,CONCATENATE( "0",A2),A2),4,2))/60+value(MID(IF(LEN(A2)=6,CONCATENATE("0",A2),A2),6,2))/3600 回车即可。 下面解释转换方法和函数意义。 以1112233 为例。 算法是111+(22/60)+(33/3600),即把分、秒都算成度后相加。 MID:意为选择指定的字符,具体写法为MID(数据,顺位,字符数),先指定1-3位(度位),再指定4-5位(分位)/60,再指定6-7位(秒位)/3600。 value:意为转换成为数值,这样才能进行运算。 关键问题在于,度有可能是2位数,如果这样整个数就是6位,上例算式中的 IF(LEN(A2)=6,CONCATENATE("0",A2),A2)
方位角测量
视力保护色: - 字体大小:大中小 第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5", 两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17' 36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、
=523611.598,计算坐标方位角计算坐标方位角、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A 点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐 标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、 =1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51",=200.40,试计算纵坐标增量横坐标增量。 键入294.4251,转换为以度为单位按[DEG],按[]键输入,键入200.40,按[]键输入,按第二功能键[2ndF],按[]屏显,按[]屏显。 第六章→第三节→导线测量内业计算 二、附合导线的坐标计算 (一)角度闭合差的计算与调整 1、联测边坐标方位角计算(坐标反算) 用式(6-4)计算起始边与终边的坐标方位角。 2、导线各边坐标方位角的计算 如图6-7所示,根据已知坐标方位角,观测右角,则各边方位角为:
FX5800P计算器坐标正反算程序Word文档
(以下程序是专业人士编写,本店铺不对程序负责,仅供您参考使用。) 卡西欧fx5800p计算器坐标正反算程序
一、程序功能 本程序由 6 个主程序、 5 个次子程序及 5 个参数子程序组成。主要用于公路测量中坐标正反算,设计任意点高程及横坡计算 , 桥涵放样,路基开挖口及填方坡脚线放样。程序坐标计算适应于任何线型 . 二、源程序 1. 主程序 1 :一般放样反算程序(① 正算坐标、放样点至置仪点方位角及距离;② 反算桩号及距中距离 ) 程序名 :1ZD-XY Lb1 0:Norm 2 F=1 : ( 正反算判别, F=1 正算, F=2 反算 , 也可以改 F 前加?,改 F 为变量 ) Z[1]=90 (与路线右边夹角) Prog " THB ": F=1=>Goto 1:F=2=>Goto 2 Lb1 1: F ix 3: "X = ": Locate 6,4, X◢ "Y=": Locate 6,4, Y◢ P rog "3JS”:Goto 0: Lb1 2:Fix 3: "KM=": Locate 6,4, Z◢ "D=": Locate 6,4, D◢ G oto 0 2.主程序2:高程序横坡程序 ( 设计任意点高程及横坡 ) 程序名: 2GC LbI 0:Norm 2 “KM”?Z:?D: Prog”H”:Fix 3:” H=”:Locate 6,4,H◢ “ I=”: Locate 6,4,I◢ Goto 0 3. 主程序 3 :极坐放样计算程序 ( 计算放样点至置仪点方位角及距离 ) 程序名: 3JS X : Y : 1268 .123→K( 置仪点 X 坐标 ) 2243 .545→L (置仪点 Y 坐标,都是手工输入 , 也可以建导线点数据库子程序 , 个人认为太麻烦) Y-L→E : X-K→F : Pol(F,E):IF J<0:Then J+360→J:Int(J)+0.01Int(60Frac(J))+0.006Frac(60Frac(J)) →J:( 不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢ 来直接显示) Fix 4:” FWJ=”: Locate 6,4,J◢( 不习惯小数点后四位为角度显示的,也可以用命令 J◢DMS◢ 来直接显示 ) Fix 3:” S=”:Locate 6,4,I◢ 4 .主程序 4 :涵洞放样程序(由涵中心桩号计算出各涵角坐标、在主程序 3 中输入置仪点坐标后计算放样点至置仪点方位角及距离 ) 程序名: 4JH-XY LbI 0:Norm 2 90→Z[1]( 涵洞中心桩与右边夹角,手工输入,也可以修改成前面加?后变为变量 )
《坐标方位角及距离计算小程序》代码——Access实现
公用模块: Option Explicit Public Const PI = 3.14159265358979 '已知A、B两点坐标计算方位角,JSFWJ的中文意思是计算方位角 Public Function JSFWJ(xa As Double, ya As Double, xb As Double, yb As Double) As Double '已知A、B两点坐标计算方位角函数过程Dim vx As Double, vy As Double vx = xb - xa: vy = yb - ya '如果A、B两点坐标相同,出现提示对话框 If vx = 0 And vy = 0 Then MsgBox "您选择的是同一个点!", vbOKOnly + vbExclamation, "提示信息" JSFWJ = 999999999# End If '计算方位角的值 If vx = 0 And vy > 0 Then '与y轴正半轴平行 JSFWJ = RadianToAngle(PI / 2#) ElseIf vx = 0 And vy < 0 Then '与y轴负半轴平行 JSFWJ = RadianToAngle(PI * 3# / 2#) ElseIf vy = 0 And vx > 0 Then '与x轴正半轴平行 JSFWJ = RadianToAngle(0) ElseIf vy = 0 And vx < 0 Then '与x轴负半轴平行 JSFWJ = RadianToAngle(PI) ElseIf vx > 0 And vy > 0 Then '第一象限 JSFWJ = RadianToAngle(Atn(vy / vx)) ElseIf vx < 0 And vy > 0 Then '第二象限 JSFWJ = RadianToAngle(Atn(vy / vx) + PI) ElseIf vx < 0 And vy < 0 Then '第三象限 JSFWJ = RadianToAngle(Atn(vy / vx) + PI) ElseIf vx > 0 And vy < 0 Then '第四象限 JSFWJ = RadianToAngle(Atn(vy / vx) + 2 * PI) End If End Function '已知A、B两点坐标计算距离,JSJLS的中文意思是计算距离S Public Function JSJLS(xa As Double, ya As Double, xb As Double, yb As Double) As Double Dim vx As Double, vy As Double vx = xb - xa: vy = yb - ya '如果A、B两点坐标相同,出现提示对话框 If vx = 0 And vy = 0 Then MsgBox "您选择的是同一个点!", vbOKOnly + vbExclamation, "提示信息" JSJLS = 99999999# End If '计算距离 JSJLS = Sqr(vx * vx + vy * vy) End Function '弧度化角度 Public Function RadianToAngle(ByVal alfa As Double) As Double Dim alfa1 As Double, alfa2 As Double alfa = alfa * 180# / PI
卡西欧5800计算器坐标正反算程序
M = (1.0/Re-1.0/Rs)/Ls; x=∫{cos(Ta + L/Rs + 0.5*M *L*L),0,L}; y=∫{sin(Ta +L/Rs + 0.5*M *L*L),0,L}; a(i)= Ta +L/Rs + 0.5*M *L*L Rs:缓和曲线起点半径 Re:缓和曲线止点半径 Rs,Re (NE坐标系下,右偏为正,左偏为负) Ta:缓和曲线起点的真北方位角 Ls:不完整缓和曲线长度。 此公式为缓和曲线在坐标系下任意位置的通用积分公式,能完全适应缓和曲线左偏、右偏、Rs >Re 、Rs
全站仪闭合导线方位角及距离计算方法步骤
闭合导线测量计算方法 ①.方位角计算(左角) 已知A,B两点坐标,且AB的方位角为30°即αAB = 30°,可求出其它方位角如下: αBC = αAB + ∠B ±180° = 30°+ 60° + 180° = 270° αCD = αBC + ∠C ±180° = 270°+ 70°- 180° = 160°
αDE = αCD + ∠D ±180° =160°+ 100° - 180° = 80° αEB = αDE + ∠E ±180° = 80° + 130° - 180° = 30°
②.方位角计算(右角) 已知A,B两点坐标,且AB的方位角为30°即αAB = 30°,可求出其它方位角如下: αBC = αAB + ∠B ±180° = 30°+ 60° + 180° = 270° αCD = αBC - ∠C ±180° = 270° - 290° + 180°= 160° αDE = αCD - ∠D ±180° =160°- 260° - 180° = 80°
αEB = αDE - ∠E ±180° = 80° - 230° - 180° = 30° 总结:角在左边用加法,角在右边用减法(左加右减);在求方位角时,两个角相加或相减得出来的得数大于180°则减去180°,若小于180°则加上180°(大减小加)。
③.坐标与距离计算方法 已知A,B两点坐标A(Xa,Ya),B(Xb,Yb), 1.求AB方位角及距离 αAB = (Y B-Y A)/(X B-X A) = Tanα x Y B-Y A 注意:测量中坐标系x,y与数学中坐标系x,y相反X B-X A Y
公路测量卡西欧5800万能程序
一、前言本程序是《CASIO fx-5800P计算与道路坐标放样计算》中道路坐标放样计算程序的升级改进版本。原道路坐标放样计算程序只基于道路的单个基本型曲线,有效计算范围仅包括平曲线部分和前后的两条直线段,使用时需要输入平曲线设计参数,无坐标反算桩号功能。改进后的程序名称为:道路中边桩坐标放样正反算程序(全线贯通),增加了可实现全线贯通的数据库功能和坐标反算桩号功能,主要是: 1.使用道路平面数据库子程序,可将一段或若干段道路的交点法格式平面参数(可容易从直线、曲线及转角表中获得)以数据库子程序形式输入计算器,程序在计算时省却了输入原始数据的麻烦; 2.坐标正算方面,输入桩号即可进行道路的中、边桩坐标计算,若输入了测站坐标,还可同时计算全站仪极坐标放样数据(拨角和平距); 3.坐标反算方面,输入平面坐标,即可计算对应的桩号和距中距离(含左右信息); 4.对于存在断链的道路,可分段分别编写数据库子程序,然后在主程序中添加一个路段选择的功能即可实现(可参照立交匝道程序中匝道的选择)。程序的特点: 1.可进行中桩坐标的正、反算,程序代码简洁,便于阅读和改写; 2.主程序通过调用数据库子程序,省却了使用时输入平面参数的繁琐; 3.使用数据库子程序,换项目只需改写数据库子程序,程序通用性强。二、道路示例项目基本资料基本资料同《CASIO fx-5800P计算与道路坐标放样计算》第6章HY高速公路第2合同段(合同段起止桩号: K4+800~K9+600)。这里摘取直线、曲线及转角表资料如下.
.
. 三、程序代码 .
. .
. .
全站仪闭合导线方位角及距离计算方法步骤
闭合导线测量计算方法 ①?方位角计算(左角) 已知A,B两点坐标,且AB的方位角为30°即a AB = 30°,可求出其它方位角如下: a BC = a AB +Z B ±180 ° = 30 +°60 + 180 =270 a CD = a BC +Z C士180 °= 270+ °70 - 180 = 160 ° a DE = a CD +Z D士180 ° =160 + 100 - 180 =°80 ° a EB = a DE +Z E 士180 °= 80 + 130 - °180 =° 30 °
②?方位角计算(右角) 已知A,B两点坐标,且AB的方位角为30°即a AB = 30°,可求出其 它方位角如下: a BC = a AB + Z B ±180 ° = 30 +°60 + 180 =270 a CD = a BC - Z C 士180 =270 -°290 +°180= °160 a DE = a CD - Z D 士180 ° =160 - 260 - 180 =° 80 a EB = a DE - Z E 士180 ° = 80 -230 - 180 =°30 ° 总结:角在左边用加法,角在右边用减法(左加右减);在求方位角时,两个角相加或相减得出来的得数大于180°则减去180°若小于 180°则加上180° (大减小加)。 ③?坐标与距离计算方法
同理可以得到D 点与E 点坐标 已知 A,B 两点坐标 A(Xa,Ya),B(Xb,Yb), 1.求AB 方位角及距离 a AB = (Y A )/(X B -X A ) = Tan a x YB-Y A A / 注意:测量中坐标系x , y 与数学中坐标系x , y 相反 X B-X A 一甘 — I Y D AB = v {(X B -X A ) 2+(Y B -Y A ) 2} 2.求C 点坐标C (Xc,Yc ) Xc = XB + D AB ? COSk AB Y C = YB + D AB- Sin a AB
5800简单全线坐标计算程序
5800全线任意坐标计算程序 1. 正算主程序(ZHCX) (不运行) 8→DimZ 1÷P→Z[4 ]:(P-R)÷(2HPR)→D: 180÷π→E “Z=”?Z:”YJJ=”?A:Abs(S-O)→W 0.26→Z[1 ]: 0.74→B: 0.02→K: 0.82→Z[3 ]: 1-Z[3 ]→F:1-K→Z[2 ] U+W(Z[1 ]cos(G+QEKW(Z[4 ]+KWD))+Bcos(G+Z[3 ]QEW(Z[4 ]+ Z[3 ]WD))+Bcos(G+QEFW (Z[4 ]+FWD))+ Z[1 ]cos(G+ Z[2 ]QEW(Z[4 ]+ Z[2 ]WD)))→X: V+W(Z[1 ] sin (G+QEKW(Z[4 ]+KWD))+B sin(G+ Z[3 ]QEW(Z[4 ]+ Z[3 ]WD))+B sin(G+QEFW (Z[4 ]+FWD))+ Z[1 ] sin(G+ Z[2 ]QEW(Z[4 ]+ Z[2 ]WD)))→Y: G+QEW(Z[4 ]+WD)→F:X+Zcos(F+A)→X:Y+Zsin(F+A)→Y:If F≧360:Then F-360→F:IfEnd ”X=”:X→X◢ ”Y=”:Y→Y◢ If F﹤0:Then F+360→F:IfEnd ”QX FWJ=”:F▼DMS◢ “C=1=>XX: C=2=>XZ”: ”C=”?C: ”QHJU=”?L: If C=1:Then Goto 1:Else Goto 2: IfEnd 可以计算斜交斜做或斜交正做的桥涵坐标 Lbi 1 X+L cos(F)→X:Y+Lsin(F)→Y: Goto 3 Lbi 2 X+L cos(F+A-90)→X:Y+Lsin(F+A-90)→Y: Goto 3 Lbi 3 “QH-X=”: X →X◢ “QH-Y=”: Y →Y◢ Prog “FY” 2 . 参数子程序(直接运行) M(主线) 一条线路一个名称 “S=”?S If S≦线元终点:Then 线元起点X值→U: 线元起点Y值→V:线元起点切线方位角→G:线元起点桩号→O:线元长度→H:线元起点半径→P:线元终点半径→R:(左偏-1,或右偏 1)→Q:Goto 1:IfEnd … … If S≦线元终点:Then 线元起点X值→U: 线元起点Y值→V:线元起点切线方位角→G:线元起点桩号→O:线元长度→H:线元起点半径→P:线元终点半径→R:(左偏-1,或右偏 1)→Q:Goto 1:IfEnd Lbi 1 Prog “ZBJS” 3. 放样程序(FY)(不运行) “X0=”?M:“Y0=”?N Pol((X-M, Y-N)
经纬度计算距离和方位角
经纬度计算距离和方位角 方位角(azimuthangle):从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。 (一)方位角的种类 由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。 (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用Am表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。 方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。不同的方位角可以相互换算。 军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。换算作:360度=6000密位。 (二)三种方位角之间的关系
因标准方向选择的不同,使得一条直线有不同的方位角。 同一直线的三种方位角之间的关系为: A=Am+δ A=a+γ a=Am+δ-γ (三)坐标方位角的推算 1.正、反坐标方位角 每条直线段都有两个端点,若直线段从起点1到终点2为直线的前进方向,则在起点1处的坐标方位角a12称为直线12的正方位角,在终点2处的坐标方位角a21称为直线12的反方位角。 a反=a正±180° 式中,当a正<180°时,上式用加180°;当a正>180°时,上式用减180°。 2.坐标方位角的推算 实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。因β2在推算路线前进方向的右侧,该转折角称为右角;β3在推算路线前进方向的左侧,该转折角称为左角。从而可归纳出推算坐标方位角的一般公式为: a前=a后+180°+β左 a前=a后+180°-β右 如果计算的结果大于360?,应减去360°,为负值,则加上360?。
卡西欧5800测量坐标计算程序
一.使用说明: 1.规定: (1)以道路中线的前进方向区分线路的左右偏转方向,线路左偏Q=-1,线路右偏Q=1,直线Q=0。 (2)当所求点位于线路中线时,Z=0;当位于左侧时,Z取负值;当位于右侧时,Z取正值。 (3)当线元为直线时,其起终点的曲率半径为无穷大,取10的45次方代替。 (4)当线元为圆曲线时,起终点曲率半径为圆曲线半径。 (5)当线元为缓和曲线时,起终点曲率半径与直线相接取10的45次方代替,与圆曲线相接取圆曲线半径。 2.输入与显示说明: (1)输入部分: N?:选择计算方式,输入1表示由里程边距计算坐标,输入2表示由 坐标计算里程边距。 X0?线元起点X坐标。 Y0?线元起点Y坐标。 S0?线元起点里程。 F0?线元起点切线方位角。 LS?线元长度。 R0?线元起点曲率半径。 RN?线元终点曲率半径。 Q?线元左右偏标志(左偏=-1,右偏=1,直线=0)
S?正算时所求点里程。 Z?正算时所求点距中线边距。位于线路左侧输入负值,在右侧输入正 值。 AR?斜交角度。(为线路右角,在0-180度之间) X?反算时所求点X坐标。 Y?反算时所求点Y坐标。 (2)显示部分: XS=计算结果,所求点X坐标。 YS=计算结果,所求点Y坐标。 FS=计算结果,所求点切线方位角。 S=计算结果,反算时所求点里程 Z=计算结果,反算时所求点边距。 二.程序清单1(用于任意曲线元的坐标计算) 1.主程序(TYQXJS) ″1.SZ=>XY″:″2.XY=>SZ″:?N:″X0″?U:″Y0″?V:″S0″?O: ″F0″?G:″LS″?H:″ R0″?P:″RN″?R:?Q:1÷P→C:(P-R) ÷(2HPR) →D:180÷π→E:If N=1: THEN Goto 1:Else Goto 2:IfEnd:Lbl 1:?S:”D(Z-,Y+)=”?Z:90→T:”O=”?T:Abs(S-O) →W:Prog ″SUB1″:″XS″:X◢″YS″:Y◢″FS″:F◢ Goto 1:Lbl 2:?X:?Y:I→X:J→Y:Prog ″SUB2″:″S″:O+W→S:◢″Z″:Z◢Goto 2 2.正算子程序(SUB1) 0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→
XY-SQ坐标、方位角、距离标准通用计算程序
XY-SQ坐标、方位角、距离标准通用计算程序 ⑵XY—SQ程序设计 AC MODE 5 1 XY ALPHA — ALPHA SQ EXE 1 A″X0″ B″Y0″ C″X1″ D″Y1″∶Lbl 3∶Pol ((C-A ), (D-B ∶″1.XY=>SQ〞∶″2.SQ=>XY〞∶ {K}∶K =1 => Goto 0∶≠> Goto 1∶ Lbl 0 ∶{X Y }∶Pol (X-A , Y-B ∶ S= I ▲ J<0 => Q= 360+ J ▲≠> Q= J ▲Goto 3 ∶ Lbl 1∶{ S W }∶X〝XP〞= A+ Rec (S , W+J ) ▲Y〝YP〞=B+J ▲Goto 3 EXE ⑶说明 ①功能: 计算测点到控制点的距离及方位角;由观察水平角、平距计算测点的坐标。 ②计算器输入及显示 X0? 输入控制点或测站坐标,米 Y0? X1? 输入后視点坐标,米 Y1? X? 输入所求点坐标,米 Y? S= 显示两点的距离,米 Q= 显示测点到控制点的方位角,度。 S? 输入平距(米), W? 输入水平角(度), XP= 显示点P的坐标。 YP= ③当K=1时,计算测点到控制点的距离及方位角,当K≠1时,由观察水平角、平距计算测点的坐标。 ⑷计算 例、控制点DA29 (229540.940,477984.580 )、后視点A30(229081.728,477624.140),拟放中桩P(229500.384,477900.260),计算两点的距离及方位角,支点B1观察角E=75°30′29″,平距716.304m。计算支点B1的坐标。 选择程序:AC FILE △选取XY—SQ程序EXE 输入数据顺序: X0? 229540.940 EXE 输入控制点坐标,米 Y0? 477984.580 EXE X1? 229081.728 EXE 输入后视点坐标,米,只计算距离及方位角可以不输。 Y1? 477624.140 EXE 1. XY=>SQ 2. 2.SQ=>XY K? 1 EXE 输入计算方式,输入1,选择计算测点到控制点的距离及方位角, X? 229500.384 EXE 输入中桩坐标,米
5800计算器全线坐标计算放样程序(修改第三版)
5800计算器全线坐标计算放样程序(修改第三版) 5800计算器全线坐标计算放样程序(修改版) “XLZBJSCX” ◢ LB1 0 ↙ CLS : FIX 4 : 30→DIM Z ↙ “XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y)0l(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":J→DMS◢(后视 方位角) LB1 1 ↙ “K=”?K ◢(计算里程) IF K<本段曲线终点里程 AND K≥上段曲线终点里程:THEN 本段终点里程→Z[1] : 上段曲线终点里程→Z[2] :1→0 (注:左偏曲线输入-1→0,右偏曲线输入1→0): 偏角→A:半径→R : 第一缓和曲线→Z[6] : 第二缓和曲线 →Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : G0T0 2 : IFEND↙ …………(曲线段分段输入) 补充直线段输入如下 IF K<本段直线终点里程 AND K≥本段直线起点里程:THEN 1→0:本段直线终点里程→Z[2]:终点X→Z[16]:终点Y→Z[11]:方位角→E:G0T0 4:IFEND LB1 2 ↙(曲线要素计算) Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙(M1) Z[7]/2- Z[6]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙(M2) Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙(P1) Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙(P2) π*A*R/180+0.5*( Z[3]+ Z[2])→W ↙(曲线总长) 90* Z[6]/(R*π) →Z[14] ↙(第一缓和曲线总偏角) 90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略) Z[8]+(R+Z[10])TAN(A/2)-(Z[11]-Z[11] )/SIN A→Z[11]↙ (切线T1) Z[9]+(R+Z[12])TAN(A/2)+(Z[10]-Z[12] )/SIN A→Z[12]↙ (切线T2) B+ Z[12]*C0S (E+180)→ Z[13] ↙(ZH点X) C+ Z[12]*SIN(E+180)→ Z[15] ↙(ZH点Y) Z[1]-S→Z[3] ↙ (ZH点里程) Z[3]+ Z[6]→Z[4] ↙ (HY点里程) Z[1]- Z[7]→Z[5] ↙ (YH点里程) G0T0 3 ↙ LB1 3 ↙(判断里程点与曲线关系) IF K≤Z[3] AND K> Z[2] : THEN G0T0 4 : IFEND ↙ IF K≤Z[4] AND K> Z[3] : THEN G0T0 5 : IFEND ↙ IF K≤Z[5] AND K> Z[4] : THEN G0T0 6 : IFEND ↙
方位角的计算方法
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角 坐标增量的计算方法: 平距×COS方位角=△X坐标增量 平距×Sin方位角=△Y坐标增量 坐标的计算方法: 已知X坐标±△X坐标增量=X坐标 已知Y坐标±△Y坐标增量=Y坐标 高差、平距的计算方法: 斜距×Sin倾角=高差 斜距×COS倾角=平距 高差÷Sin倾角=斜距 平距÷cos已知度分秒=斜距 高程的计算方法: 已知高程-仪器高+前视高±高差=该点的顶板高差 原始记录计算方法: 前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″
前视92°49′02″272°49′13″水平角= 92°49′03″ 实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″ 实例: 270°30′38″-270°= 00°30′38″ 激光的计算方法:两点的高程相减: 比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、798 8、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点) 测量:1、先测后视水平角:归零,倒镜180°不能误差15′ 2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。 要求方位角-已知方位角±180°=拨角方位 画两千的图:展点用0.6正好. 倾角的计算方法:180°以下的-90° 270°-超过180°的 两点的高差除平距按tan=倾角
5800-9860计算器坐标正反算通用程序
5800-9860计算器坐标正反算通用程序 1. 坐标正算主程序(命名为ZBZS) 第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B 第2行:Prog “A” 第3行:”X=”:N+Zcos(F+B)◢ 第4行:”Y=”:E+Zsin(F+B)◢ 第5行:”F=”:F◢ 第6行:Goto 0 K——计算点的里程 BIAN——计算点到中桩的距离(左负右正) α——取前右夹角为正 2. 坐标反算桩号和偏距主程序(命名为ZBFS) 第1行:”X1=”? C:”Y1=”?D: ”K1=”?K 第2行:Lbl 0:Prog “A” 第3行:Pol(C-N,D-E) 第4行:List Ans[1]→I 第5行:List Ans[2]→J 第6行:Icos(F-J)→S:K+S→K 第7行:Abs(S)>0.0001=>Goto 0 第8行:”K1=”:K◢ 第9行:”BIAN=”:Isin(J-F)→Z◢ X1——取样点的X坐标 Y1——取样点的Y坐标 K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号 Z——偏距(左负右正) 3. 计算坐标子程序(命名为XYF) 为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I 第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N 第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E 第4行:F+S(2P+SI)×90÷π→F 4. 数据库(命名为A)
第1行:K≤175.191=>Stop 第2行: 175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/240→Q:70.417→L: K≤A+L =>GoTo 1(第一缓和曲线,圆半径为240) 第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q: 72.915→L: K≤A+L =>Goto 1(第圆曲线,半径为240) 第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104 →L: K≤A+L =>Goto 1(第二缓和曲线,圆半径为240) 第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:- 1/180→Q:67.222→L: K≤A+L=>Goto 1:Stop(第一缓和曲线,圆半径为180) 第6行:Lbl 1:Prog “XYF” A——曲线段起点的里程 N——曲线段起点的x坐标 E——曲线段起点的y坐标 F——曲线段起点的坐标方位角 P——曲线段起点的曲率(左负右正) Q——曲线段终点的曲率(左负右正) L——曲线段长度(尽量使用长度,为计算断链方便) 说明: (1)在9860中,程序中所有公式和部分函数结果均存储在List Ans列表数组中,要想多次调用最好随公式取出结果,并赋给变量。 (2)正算主程序可以计算一般边桩的坐标,如要计算类似涵洞端墙的坐标需增加第二偏距和转角两个变量。 (3)程序规定,左偏曲线曲率(半径倒数)输入负值,右偏曲线曲率输入正值,直线上点曲率输入0,例如直线段,线元起点和终点均输入0,第一缓和曲线分别输入0和圆半径的倒数,圆曲线均输入半径倒数,第二缓和曲线分别输入圆半径倒数和0,卵形曲线分别输 入对应圆半径的倒数 (4)若是从大里程向小里程的反方向计算,则曲率取正方向时的负值,方位角减去(或加上)180度。 (5)有多个匝道的项目,可随时更改正反算主程序中的红色字体部分来调用其它线路的数据 (6)反算桩号偏差为1mm (7)可以计算任意线型的任意点坐标
CASIO fx-5800p测量程序
CASIO fx-4800P、fx-5800P型计算器用于线路施工 曲线中线点坐标的计算程序 中铁十局三建公司工程技术部 摘要:本文介绍了CASIO fx-4800P 、fx-5800P型计算器程序编制用于铁路、公路曲线线路内任意中线点的坐标计算程序及使用方法。本计算程序具有操作简便、计算快捷、应用广泛等特点、极大地减轻了测量工作者的内业工作量,对于测量工作者有较大的参考和指导作用。关键词:曲线线路施工测量计算程序 1.概述 过去,线路中线施工放样基本依靠经纬仪和钢尺了来进行角度及距离测量。对于曲线线路一般的测量方法是:经纬仪置于某一中线点上,采用偏角法拨角再用钢尺量距来定出中线点。随着电子技术进步和经济发展,测量仪器和测量方法的不断改进,目前,全站仪已广泛地应用于工程施工测量中,极大的提高了测量工作效率。但是,在进行铁路、公路工程的曲线线路施工测设时,需要在线路所在区域建立统一坐标系或独立坐标系,利用坐标变换的方法,将整个曲线的三个部分(第一缓和曲线、中间圆曲线、第二缓和曲线)统一到同一坐标系中。根据坐标系的建立,计算出整个曲线内任意点的坐标,再采用全站仪利用极坐标方法进行施工放样。前提是首先利用计算器计算出各中线点坐标,然后才能进行放样。而普通型计算器不仅计算速度慢,且要求计算者必须正确地记忆很多计算公式,计算繁琐而且容易出错,满足不了现场测设工作的要求。为了能够快速准确地为全站仪提供测设
数据,发挥全站仪快速测设的特点,提高测量工作效率,应采用可编程的计算器,编制计算程序。本文主要介绍应用CASIO fx-4800P型计算器的计算程序,供公司测量同行们参照使用。 2.计算程序 QXZBJS(文件名:曲线坐标计算fx-4800P) Defm2:R:L:A:N“ZH:X=”:E“ZH:Y=”:F:“FWJ=”:K“ZH:LC=”: P=L2/(24R)-L4/(2688R3):M=L/2-L3/(240R2):T“T”=(R+P)tng(A/2)+M ◢G=RAπ/180:“S”S=G+L◢ LbiA:{C,V}:C“CSDLC=”:V“HXPJ=”:D=C-K:D≤L=>I=D-D5/(40R2L2):U=D3/(6RL)-D7/(336R3L3):J=√(I2+U2):Goto1:≠>D≤G=>O=90(2D-L)/( Rπ):I=RsinO+M:U=R(1-cosO)+P:J=√(I2+U2):Goto2:≠>D=S-(C-K): = D-D5/(40R2L2):Z[2]=D3/6RL-D7/(336R3L3):I=T+(T-Z[1])cosA-Z[2]sinA:U=(T-Z[1])sinA+Z[2]cosA:J=√(I2+U2):Goto3:Lbi1:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-30D2/ (RLπ):H=F-90D2/ (RLπ):≠>Q=F+30D2/ (RLπ):H=F+90D2/( RLπ)⊿ Goto4:Lbi2:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-tng-1(U/I):H=F-O:≠>Q= F+tng-1(U/I):H=F+O⊿Goto4:Lbi3:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-tng-1(U/I):H=F-(A-90(S-(C-K))2/ (RLπ)): ≠>Q= F+tng-1(U/I):H=F+(A-90(S-(C-K))2/ (RLπ)):⊿ Goto4: Lbi4:B=90+H:H<0=>H“QXFWJ”=B+360◢≠>H≥360=>H“QXFWJ”=H-360 ◢≠>H“QXFWJ”=H◢⊿Goto5: Lbi5: X“CSD:X”=JcosQ+N+VcosB◢ Y“CSD:Y”=JsinQ+E+VsinB◢