重庆大学硕士研究生机械系统动力学课程作业

重庆大学硕士研究生机械系统动力学课程作业汽车系统的动力学响应简单分析
小组成员:李航,王青松,田文昌,谢道坤
学号:20150713058t, 20150702040, 20150702036,20150702051指导教师:何荇兮学院:机械工程学院专业:机械工程班级:传动3班
重庆大学
二O一五年十一月
汽车系统的动力学响应简单分析
一、 问题描述
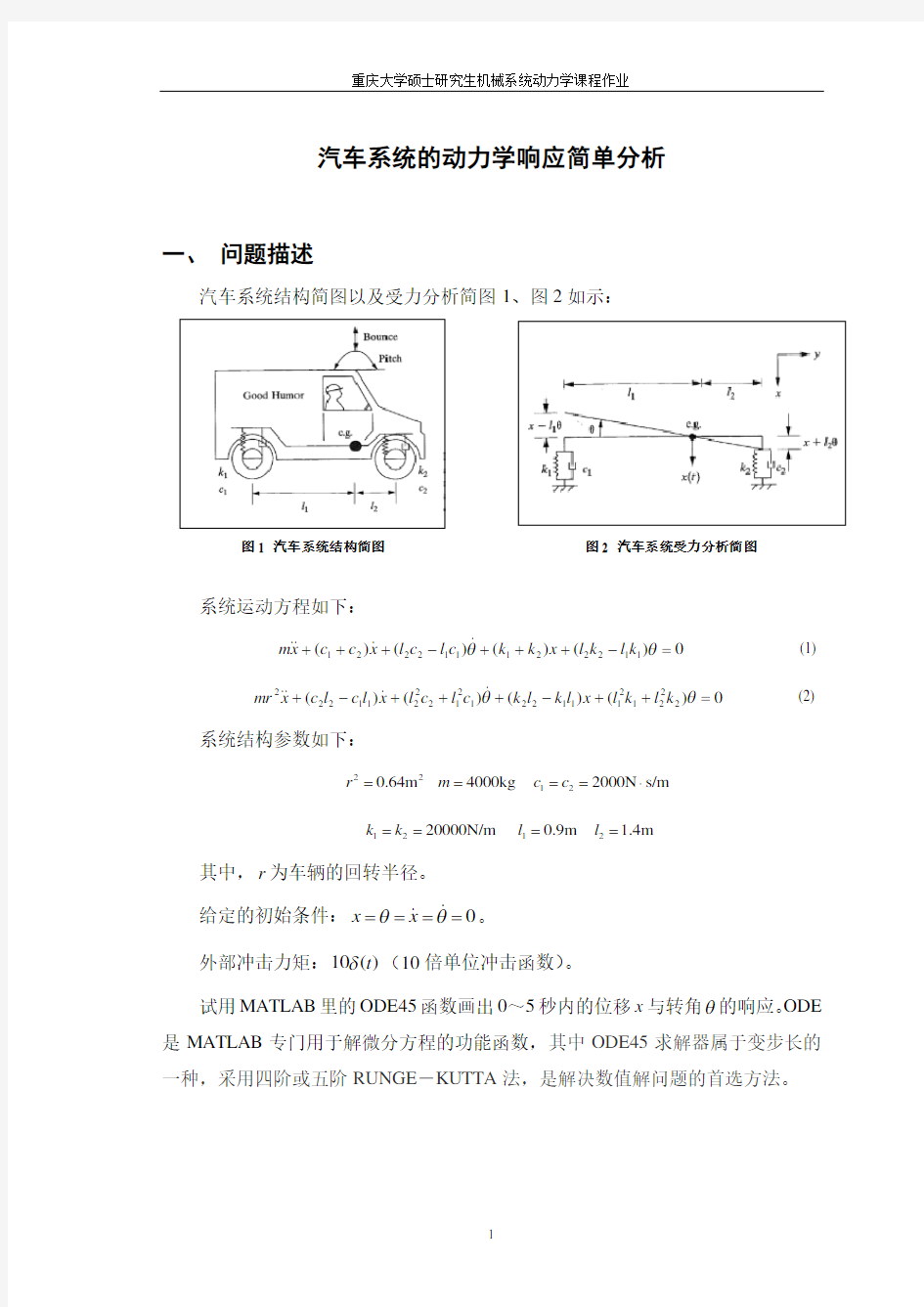
汽车系统结构简图以及受力分析简图1、图2如示:
图1 汽车系统结构简图
图2 汽车系统受力分析简图
系统运动方程如下:
0)()()()(1
12221112221=-+++-+++θθk l k l x k k c l c l x c c x m (1) 0)()()()(2
22121112212122211222=++-+++-+θθk l k l x l k l k c l c l x l c l c x mr (2) 系统结构参数如下:
22120.64m 4000kg
2000N s/m r m c c ====?
121220000N/m 0.9m
1.4m k k l l ====
其中,r 为车辆的回转半径。
给定的初始条件:0====θθ x
x 。 外部冲击力矩:)(10t δ(10倍单位冲击函数)。
试用MATLAB 里的ODE45函数画出0~5秒内的位移x 与转角θ的响应。ODE 是MATLAB 专门用于解微分方程的功能函数,其中ODE45求解器属于变步长的一种,采用四阶或五阶RUNGE -KUTTA 法,是解决数值解问题的首选方法。
二、求解方法
已知汽车的运动学方程,在t=0时,存在一个冲击力矩)(10t δ,此时运动学方程表示为:
0)()()()(1
12221112221=-+++-+++θθk l k l x k k c l c l x c c x m (3) 2222
22211221122112211()()()()10()mr c l c l x l c l c k l k l x l k l k t θθθδ+-+++-++= (4)
冲击函数()t δ的定义:
本算例中的冲击函数为一个分步函数,由于时间的非负性,冲击函数的定义为:
1,
()0,
t t t δ=?=?
>? 根据题目给出的结构参数和初始条件,通过MATLAB 中的ODE45函数编写程序求解添加了冲击的运动学方程得出结果,并画出0~5秒内汽车系统的位移x 与转角θ的响应图。
三、求解过程
MATLAB 中的编程思路及过程如下:
首先将运动学方程写成一阶常微分方程组形式:
t=0时:12
22413
34424130.2510 2.50.00250.390625 2.1640625 3.9062521.640625x x x x x x x x x x x x x x =??=----??=??=----?
t>0时:12
22413
3442413
0.2510 2.50.390625 2.1640625 3.9062521.640625x x x x x x x x x x x x x x =??=----??=??=----?
在MATLAB 里的ODE45函数编写计算主程序,如下所示:
clc;clear;
t0=0;tf=5; % 0<=t<=5 x0=[0 0 0 0]; % 定义初始值
[t,x]=ode45('f3',[t0 tf],x0); % ODE45调用3f figure; plot(t,x);
由MATLAB 编程可定义函数3f ,程序如下所示:
function xdot=f3(t,x) %定义函数3f xdot=zeros(4,1); if t<=0
xdot=[x(2);
-((2000+2000)*x(2)+(1.4*2000-0.9*2000)*x(4)+(20000+20000)*x(1)+(1.4*20000-0.9*20000)*x(3))/4000
x(4);
10/4000-((2000*1.4-2000*0.9)*x(2)+(1.4*1.4*2000+0.9*0.9*2000)*x(4)+(20000*1.4-20000*0.9)*x(1)+(0.9*0.9*20000+1.4*1.4*20000)*x(3))/(4000*0.64)];
% 当t=0时,作用一个冲击冲击力矩)(10t δ else
xdot=[x(2);
-((2000+2000)*x(2)+(1.4*2000-0.9*2000)*x(4)+(20000+20000)*x(1)+(1.4*20000-0.9*20000)*x(3))/4000
x(4);
-((2000*1.4-2000*0.9)*x(2)+(1.4*1.4*2000+0.9*0.9*2000)*x(4)+(20000*1.4-20000*0.*x(1)+(0.9*0.9*20000+1.4*1.4*20000)*x(3))/(4000*0.64)];
% 当t>0时的运动学方程,此时冲击已经结束 End
最后运行程序即可得到计算结果以及0~5秒内汽车系统的位移x 与转角θ的响应图。
四、结果与分析
经过MATLAB运行计算最终得到0~5秒内汽车系统的位移x与转角θ的响应图如下:
图3 汽车系统位移x与转角θ的响应图
由图3可看出:在t=0时,由于冲击力矩的存在,θ 曲线急剧上升,而冲击力矩对x、x 、θ的初始状态没有影响,但是使它们在随后的时间产生了波动。同时还可以看出位移x与转角θ的响应时间约为4.5s,由于系统存在阻尼,在此之后位移x与转角θ的响应逐渐趋于平缓,最终趋于无干扰存在时的静止状态,可见静止状态是一种稳态。
五、总结与感想
在经过这学期的机械系统动力学课程学习,我们收获很多了,学习了不少的内容。首先,我们学习了质点动力学,其中我们主要学习了五大坐标系:笛卡尔坐标系、柱坐标系、极坐标系、球面坐标系还有路径坐标系。通过对这五大坐标系的学习,我们知道了如何在对一个实际的模型进行分析求解时,选择正确的坐标系。然后,我们学习了动力学,其中主要学习了矢量对时间的导数的求法,单位矢量在旋转系统中的导数的求法,同时还学习了刚体的动力学分析。接着,我们学习了相对运动,其中学习了不同坐标系之间的转换,以及不同坐标上单位矢量之间的转换方法,还学习了力与扭矩的平衡问题。最后,我们学习了拉格朗日方程,其中我们学会了求解虚位移、虚功、学会了求解拉格朗日方程的具体步骤。通过,前面内容的学习,我们学会了机械系统动力学的基本知识,学到了简单机械系统运动方程的建立与求解。
在课程结束后,经过老师的指导我们小组四个人,利用MATLAB结合相关机械动力学知识一起完成了课程大作业。我们通过这次汽车系统的动力学的响应简单分析,使用MATLAB中的ODE45函数求解一阶常微分方程组,通过对比加入初始冲击转矩与存在初始速度时的不同的响应图以及系统的稳定状态,加深了对冲击、阻尼及动力学方程的认识,这类似于通过MATLAB对汽车系统振动进行了一次仿真,而通过响应图可以更直观、更准确地分析系统振动的位移、角度、速度以及角速度的变化情况。
最后,真心感谢何老师上课时的认真教导!何老师上课教学严谨、所讲的内容深入浅出,循循善诱,认真负责,对我们不会的问题都会非常悉心的解答。最后,再次感谢何老师的指导!谢谢老师!
2020年公需科目《人工智能》答案
1.目前,人工智能发展存在的问题不包括()。( 2.0分) A.泡沫化 B.重复化 C.与应用结合不够紧密 D.缺乏热情 我的答案:D √答对 2.智能制造的核心是改变传统产品的本质,最终实现产品的“三化”,其中不包括()。(2.0分) A.数字化 B.网络化 C.智能化 D.规模化 我的答案:D √答对 3.微博上面人们最关心的与人工智能相关的关键词是()。(2.0分) A.善恶、安全、就业、进化、终结 B.善恶、安全、就业、进化、法律 C.善恶、安全、就业、风险、终结 D.善恶、安全、进化、风险、法律 我的答案:B ×答错 4.2016年8月,日本电视台报道称,东京大学医学研究所通过运用IBM的人工智能平台Watson仅用10分钟就诊断出了资深医师难以判别出来的()。(2.0分) A.甲状腺癌 B.胰腺癌 C.淋巴癌 D.白血病 我的答案:D √答对 5.成年男性的正常脉搏为每分钟()次。(2.0分) A.60~80 B.70~90 C.80~100 D.90~120 我的答案:A √答对 6.成年女性的正常脉搏为每分钟()次。(2.0分) A.60~80 B.70~90 C.80~100 D.90~120 我的答案:B √答对 7.世界上第一个将芯片植入体内的人是()。(2.0分) A.凯文·沃里克 B.布鲁克斯 C.罗斯·昆兰 D.杰弗里·辛顿 我的答案:A √答对
8.约瑟夫·维森鲍姆教授开发的()被设计成一个可以通过谈话帮助病人完成心理恢复的心理治疗师。(2.0分) A.微软小冰 B.苹果Siri C.谷歌Allo D.ELIZA 我的答案:D √答对 9.()是没有人驾驶、靠遥控或自动控制在水下航行的器具。(2.0分) A.无人机 B.战场机器人 C.无人潜航器 D.无人作战飞船 我的答案:C √答对 10.智能制造的本质是通过新一代信息技术和先进制造技术的深度融合,实现跨企业价值网络的横向集成,来贯穿企业设备层、控制层、管理层的纵向集成,以及产品全生命周期的端到端集成,而()是实现全方位集成的关键途径。(2.0分) A.标准化 B.数据化 C.流程化 D.网络化 我的答案:A √答对 11.()是普遍推广机器学习的第一人。(2.0分) A.约翰·冯·诺依曼 B.约翰·麦卡锡 C.唐纳德·赫布 D.亚瑟·塞缪尔 我的答案:C √答对 12.在农业领域的()环节,智能的农业机器人可以利用图像识别技术获取农作物的生长状况,判断哪些杂草需要清除,判断哪里需要灌溉、施肥、打药,并立即执行。(2.0分) A.产前 B.产中 C.产后 D.全程 我的答案:B √答对 13.当我们需要寻求健康咨询服务时,应该拨打的热线电话是()。(2.0分) A.12315 B.12301 C.12345 D.12320 我的答案:D √答对 14.下列关于人工智能对实体经济的影响说法不正确的是()。(2.0分) A.人工智能能够提升实体经济能级 B.人工智能能够加快经济转型 C.人工智能能够加快创新驱动发展
重庆大学网教作业答案-互联网及其应用
第2次作业 一、单项选择题(本大题共30分,共 10 小题,每小题 3 分) 1. 10BAE-5采用的传输介质是()。 A. 英寸的同轴电缆 B. 英寸的同轴电 缆 C. 1英寸的同轴电缆 D. 双绞线 2. WiFi的带宽为()。 A. 2Mbps B. 5Mbps C. 54Mbps D. 108Mbps 3. 在TCP/IP协议簇中,UDP协议工作在( ) A. 应用层 B. 传输层 C. 网络互联层 D. 网络接口层 4. 从应用角度看,2G移动通信技术与3G移动通信技术的差异在于()。 A. 是否支持语音 B. 是否支持短信 C. 是否支持彩信 D. 是否支持视频流 5. 在鉴别首部中,序号字段描述正确的是:() A. 序号编码是随机的 B. 序号的编码从零开始 C. 序号中隐含了采用的加密算法 D. 序号中隐含了安全方案 6. TCP层的TCP协议和UDP协议的端口总数为()。 A. 32768个 B. 65535个C. 65535×2个 D. 256个 7. 在互联网上所有的网络上广播的IP地址是()。 A. B. C. D. 不存在这种地址 8. 请问以下哪个IP地址与映射为相同的以太网组播地址()。 A. B. C. D. 9. SMI的描述语言是: A. C语言 B. 汇编语言 C. D. C++ 10. 以下描述错误的是()。 A. TCP中引入序号是基于数据传输可靠性的考虑 B. TCP协议传输的数据可能丢失,所以不可靠 C. TCP具备数据确认和重传机制 D. TCP采用了数据传输定时器 二、多项选择题(本大题共40分,共 10 小题,每小题 4 分) 1. 物联网在农业生产应用中,可以()。 A. 监测土壤湿度 B. 监测果实成熟情况 C. 监测大棚温度 D. 自动喷水 E. 自动发现病虫害 2. 无线传感器体积微型化主要依赖以下哪些技术()。 A. 超大规模集成电路技术 B. 能耗控制及技术 C. 无线网络技术 D. 微电子机械系统技术 E. 传感器技术 3. 移动游戏支持的终端包括()。 A. 手机 B. 智能手机 C. 平板电脑 D. 网页浏览器 E. 游戏机 4. 移动视频的视频数据主要有以下()方式形成。 A. 高清播放 B. 标清播放 C. 离线转码 D. 实时转码 E. 实时采集 5. NAT中的地址转换表有几种初始化方式有:() A. 手工初始化 B. 外发数据报 C. 传入域名查找 D. 零初始化 6. 物联网在环境监测应用中,可以()。 A. 改变海洋温度 B. 监测海洋温
“机械动力学”课程教学大纲
“机械动力学”课程教学大纲 英文名称:Mechanical Dynamics 课程编号:MACH3441 学时:32 (理论学时:32 实验学时:课外学时:2实验) 学分:2 适用对象:机械设计、机械制造及自动化、机械电子工程、流体机械、电机、电器、材料工程等本科生高年级。 先修课程:高等数学、普通物理学、理论力学、材料力学、线性代数使用教材及参考书: [1] 石端伟主编. 机械动力学. 北京:中国电力出版社,2007. [2] 张策主编. 机械动力学.北京:高等教育出版社, 2008. [3] 倪振华主编. 振动力学. 西安交通大学出版社,1988. 一、课程性质和目的 性质:专业课 目的: 1.了解机械动力学的研究内容、发展历史以及最新研究进展。 2.培养机械系统动力学分析的基本能力。 3.了解机械系统动力学分析相关的CAE软件。 4.了解机械系统动态测试有关技术。 5.培养查阅和运用相关科技文献进行动力学分析的初步能力。 6.培养创新思维以及解决工程实际问题的能力。 7.培养科学、严谨的工作作风。
二、课程内容简介 随着现代机械装备朝着高精度、高效、大功率的方向发展,其动态性能指标的优劣越来越受到广泛关注和高度重视。机械动力学已日益成为现代机械设计与制造工程领域不可或缺的基础知识。本课程主要介绍机械系统动力分析的基本理论、分析方法、测试与控制技术以及典型机械系统动力学分析方法。通过课程的学习,培养学生能够在机械系统动力分析方面具有明确的基本概念、必要的专业基础知识、一定的机械系统动力分析能力与计算能力。 三、教学基本要求 1.了解相关机械系统动力学分析的新理论、新方法及发展趋向。 2. 掌握有关机械系统动力学分析的基本概念、基本理论与方法。 3. 了解典型机械系统动力学分析流程,具有进行工程实际问题分析的初步能力。 4. 建立正确的机械系统动力分析的思维方式,理论联系实际,具备一定的科研创新精神; 5. 课后需要查阅文献,并开展讨论,完成作业。 四、教学内容及安排 第一章:绪论 1.熟悉研究机械动力学的意义。 2.熟悉机械动力学的主要研究内容。 教学安排及教学方式
人工智能和发展
人工智能和发展 摘要:人工智能是20世纪计算机科学发展的重大成就,在许多领域有着广泛的应用。论述了人工智能的定义,分析了目前在管理、教育、工程、技术、等领域的应用,总结了人工智能研究现状,分析了其发展方向。关键词:人工智能;计算机科学;发展方向 1 人工智能的定义 人工智能(Artificial Intelligence,AI),是一门综合了计算机科学、生理学、哲学的交叉学科。“人工智能”一词最初是在1956年美国计算机协会组织的达特莫斯(Dartmouth)学会上提出的。自那以后,研究者们发展了众多理论和原理,人工智能的概念也随之扩展。由于智能概念的不确定,人工智能的概念一直没有一个统一的标准。著名的美国斯坦福大学人工智能研究中心尼尔逊教授对人工智能下了这样一个定义“人工智能是关于知识的学科——怎样表示知识以及怎样获得知识并使用知识的科学。”而美国麻省理工学院的温斯顿教授认为“人工智能就是研究如何使计算机去做过去只有人才能做的智能工作。”童天湘在《从“人机大战”到人机共生》中这样定义人工智能:“虽然现在的机器不能思维也没有“直觉的方程式”,但可以把人处理问题的方式编入智能程序,是不能思维的机器也有智能,使机器能做那些需要人的智能才能做的事,也就是人工智能。”诸如此类的定义基本都反映了人工智能学科的基本思想和基本内容。即人工智能是研究人类智能活动的规律,构造具有一定智能的人工系统,研究如何让计算机去完成以往需要人的智力才能胜任的工作,也就是研究如何应用计算机的软硬件来模拟人类某些智能行为的基本理论、方法和技术。 2 人工智能的应用领域 2.1 人工智能在管理及教学系统中的应用人工智能在企业管理中的应用。刘玉然在《谈谈人工智能在企业管理中的应用》一文中提到把人工智能应用于企业管理中,认为要做的工作就是搞清楚人的智能和人工智能的关系,了解人工智能的外延和内涵,搭建人工智能的应用平台,搞好企业智能化软件的开发工作,这样,人工智能就能在企业决策中起到关键的作用。人工智能在智能教学系统中的应用。焦加麟,徐良贤,戴克昌(2003)在总结国际上相关研究成果的基础上,结合其在开发智能多媒体汉德语言教学系统《二十一世纪汉语》的过程中累积的实践经验,介绍了智能教学系统的历史、结构和主要技术,着重讨论了人工智能技术与方法在其中的应用,并指出了当今这个领域上存在的一些问题。 2.2 人工智能专家系统在工程领域的应用人工智能专家系统在医学中的应用。国外最早将人工智能应用于医疗诊断的是MYCIN专家系统。1982年,美国Pittsburgh大学Miller发表了著名的作为内科医生咨询的Internist 2I内科计算机辅助诊断系统的研究成果,1977年改进为Internist 2Ⅱ,经过改进后成为现在的CAU-CEUS,1991年美国哈佛医学院Barnett等开发的DEX-PLAIN,包含有2200种疾病和8000种症状。我国研制基于人工智能的专家系统始于上世纪70年代末,但是发展很快。早期的有北京中医学院研制成“关幼波肝炎医疗专家系统”,它是模拟著名老中医关幼波大夫对肝病诊治的程序。上世纪80年代初,福建中医学院与福建计算机中心研制的林如高骨伤计算机诊疗系统。其他如厦门大学、重庆大学、河南医科大学、长春大学等高等院校和其他研究机构开发了基于人工智能的医学计算机专家系统,并成功应用于临床。人工智能在矿业中的应用。与矿业有关的第一个人工智能专家系统是1978年美国斯坦福国际研究所的矿藏勘探和评价专家系统PROSPECTOR,用于勘探评价、
重庆大学网教作业答案-互联网及其应用 ( 第1次 )
第1次作业 一、单项选择题(本大题共30分,共 10 小题,每小题 3 分) 1. 中国制定的3G技术标准是()。 A. WCDMA B. CDMA2000 C. TD-SCDMA D. WiMAX 2. 某个程序员设计了一个网络游戏,他选择的端口号应该是() A. 77 B. 199 C. 567 D. 2048 3. TCP拥塞窗口控制没有采用以下哪种技术() A. 慢启动 B. 拥塞避免 C. 加速递减 D. 滑动窗口 4. 以太网采用共享总线方式工作的接入机制为()。 A. CSMA B. 时隙CSMA C. CSMA/CA D. CSMA/CD 5. IGMP协议通过__________来传输() A. IP B. UDP C. TCP D. 以太网数据帧 6. IGMP报文的长度为()。 A. 4个八位组 B. 8个八位组 C. 12个八位组 D. 可变长度 7. FTP协议下层采用的协议是:() A. UDP B. TCP C. IP D. TELNET 8. 在电子邮件中,我们往往会添加附件信息,例如图片。请问它与哪个协议最相关()。 A. SMTP B. POP3 C. IMAP D. MIME 9. 以下哪个协议采用了OSPF的数据库信息()。 A. DVMRP B. PIM C. MOSPF D. CBT 10. 请问以下哪个IP地址与224.129.2.3映射为相同的以太网组播地址 ()。 A. 224.1.2.3 B. 224.130.2.3 C. 224.135.2.3 D. 224.11.2.3 二、多项选择题(本大题共40分,共 10 小题,每小题 4 分) 1. 移动视频主要在以下()平台上。 A. 智能手机 B. 平板电脑 C. 笔记本 电脑 D. 台式电脑 E. 网络服务器 2. 物联网的感应器可以安装在以下()物体中。 A. 电网 B. 铁路 C. 桥梁 D. 隧道 E. 公路 3. MIME对以下哪些内容的发送是必须的()。 A. 汉字内容 B. 图片附件 C. WORD文档附件 D. 动画附件 E. 视频附件 4. IP路由表设计中采用了哪些技术来缩小路由表的规模() A. IP网络号代替主机号
matlab机电系统仿真大作业
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
机械动力学大作业
单自由度杆机构的Adams动力学仿真 摘要:文章分析了单自由度的铰链机构的动力学问题,已知原动件曲柄的转矩,绘制输出件摆杆的运动曲线。首先在Adams软件中构造连杆,添加三个连杆,使其成一定角度,相互连接。再在两杆之间添加转动副,并且头尾连杆与地相连。并在曲柄处加转矩,最后进行仿真,并绘出相应图表。 关键词:铰链机构;Adams仿真 1、机构模型的建立 根据题目要求,选择一个铰链四杆机构——曲柄摇杆机构为模型,其结构简图如图1所示。其中,曲柄1为原动件。 图1曲柄摇杆机构简图 在Adams软件中,建立该曲柄摇杆机构的模型如图2所示。 图2 Adams中的曲柄摇杆机构模型
曲柄摇杆机构各连杆的惯性参数参考表1。杆件的材料均选择钢材(密度ρ=7.801×10-6 kg?mm-3,杨氏模量E=2.07×105 N?mm-2,泊松比μ=0.29)。 表1 传动导杆机构各部件惯性参数 2、利用Adams软件添加约束和力矩 杆1和地之间有转动副,杆1和杆2、杆2和杆3之间有转动副,杆3和地之间有转动副。杆1为原动件,在杆1上添加转矩。转矩大小为30。 图3约束与转矩 3、进行仿真 点击仿真按钮,开始仿真,选择仿真时间为2s,可以观察到该机构各个时间的运动状态如图4和图5所示。
(a)T=0时刻(b)T=1时刻 图4仿真过程中机构模型的运动状态 (a)T=1.2时刻(b)T=2时刻 图5仿真过程中机构模型的运动状态 结论 当原动件曲柄的转矩取为30时,点击“后处理”,可以绘制出输出件摆杆的位移曲线、角速度曲线、加速度曲线分别如图10、图11和图12所示。 图10输出件摆杆的位移曲线
重庆大学网教作业答案-工程建设合同管理-(-第2次-)
第2次作业 一、单项选择题(本大题共40分,共 20 小题,每小题 2 分) 1. 甲、乙双方互负债务,没有先后履行顺序,一方在对方履行之前有权拒绝其履行要求在对方履行债务不符合约定时有权拒绝其相应的履行要求.这在合同法上是( ). A. 先履行抗辩权 B. 先诉抗辩权 C. 同时履行抗辩权 D. 不安抗辩权 2. 仲裁应当( )进行. A. 不开庭 B. 开庭但不一定公开 C. 公开开庭 D. 书面审理,当事人不出庭 3. FIDIC施工合同条件规定,用从( )之日止的持续时间为缺陷通知期,承包商负有修复质量缺陷的义务. A. 开工日起至颁布发接收证书 B. 开工令要求的开工日起至颁布发接收证书中指明的竣工 C. 颁发接收证书日起至颁发履约证书 D. 接收证书中指明的竣工日起至颁发履约证书 4. 施工合同约定,风力超过8级以上的停工应给予工期顺延.某承包人在5月份一水塔高空作业的施工中遇7级风,按照安全施工管理规定的要求,停工 5天,为此提出工期索赔的要求.其理由是当地多年气候资料表明5月份没有大风,此次连续大风属于不可预见的情况.该承包人的索赔理由属于( ). A. 工程变更索赔 B. 工程加速索赔 C. 合同被迫终止索赔 D. 合同中默示的索赔 5. 施工企业的项目经理是施工企业的代理人,这种代理是( )代理. A. 委托 B. 法定 C. 指定 D. 再 6. 施工合同中双方对工程质量有争议,请求协议条款约定的()仲裁. A. 仲裁委员会 B. 质量监督部门 C. 行政管理部门 D. 上级管理部门 7. 关于施工合同设计变更管理的正确说法是( ). A. 施工合同范本中将工程变更分为工程设计变更和其他变更两类 B. 施工中承包人可以因施工方便而要求对原工程设计进行变更 C. 承包人在施工中提出的对涉及到设计图纸设计变更等的合理化建议,可以无须经工程师的同意 D. 施工中发包人需对原工程设计进行变更,应提前向承包人发出变更申请
重庆市普通高中2018级学业水平考试信息技术复习题(一)高清版
重庆市普通高中2018级学生学业水平考试 信息技术测试题(一) 注意事项: 1.满分100分,考试时间为90分钟。 2.答题前,考生务必将考场地点、毕业学校、姓名、准考证号、考试科目等填写在答题卡上的规定 位置,并用2B铅笔填涂相关信息。 3.所有试题的答案请用2B铅笔填涂在答题卡上。 一、判断题(共25题,每题1分,共计25分) 1.农民丰收后农产品没有销路,有农民在互联网上发布了农产品的信息,一下子打开了销路。这充分说明了信息的价值性。() A.正确 B.错误 2.利用网际快车下载文件,如果没有下载完成就关闭计算机,下次开机下载的时候,不可以接着在上次下载的断点处继续下载。() A.正确 B.错误 3.如果字母C的ASCII码为67,那么字母A的ASCII码为65。() A.正确 B.错误 4.在如下图所示的Word文档中,人物图片“加里·基尔代尔”的环绕方式为上下型() A.正确 B.错误 5.在Excel中,当使用菜单“格式”→“列”→“列宽”设列宽为9个字符(如右图所示)时,表示其储存格所能显示的字符个数不论字形大小都只能显示9个字符() A.正确 B.错误 6.在Word中输入一组学生姓名,每输完一个学生姓名后按一下“Enter”键, 全部输入完毕后,选择所有学生姓名后单击复制按钮。再启动Excel后能进行粘 贴,粘贴后所有学生的姓名在同一列() A.正确 B.错误
7.在Flash动画制作中,制作“遮罩动画”时,遮罩图层必须在被遮罩图层的上方() A.正确 B.错误 8.张老师收上来的学生作业,在电脑上显示如下图所示,文件”015.PPT”很有可能打不开() A.正确 B.错误 9.视频和动画都是利用人眼的视觉暂留效应来产生画面连续的运动效果() A.正确 B.错误 10.观察下面声音控制面板,如想利用话筒进行扩音,应对声音控制面板进行取消③项的操作() A.正确 B.错误 11.在VB中,表达式Int(-5.8)的结果是-6 ( ) A.正确 B.错误 12.在程序运行过程中其值可以被改变的量称为常量。() A.正确 B.错误 13.人们经常要将纸质材料扫描成电子材料再进行编辑,现有一些OCR软件能够将扫描图片中的文字转换为普通字符。OCR软件利用的技术是模式识别。() A.正确 B.错误 14.张琳对着自己的手机说“请关机”,手机马上就执行了关机命令,这其中主要应用了人工字符识别技术。() A.正确 B.错误 15.用QQ或MSN等工具软件,可以实现一对一在线视频或语音交流() A.正确 B.错误 16.在一个数据表中修改了某条记录后,与其相关的查询结果不会随之改变() A.正确 B.错误 17.我们通常所说的IP电话就是利用互联网进行语音传输的电话() A.正确 B.错误 18.我们通常说的“黑客”(Hacker)是指对网络危害极大的一些不健康的网站( ) A.正确 B.错误
重庆大学网教作业答案-工程招投标 ( 第1次 )
第1次作业 一、单项选择题(本大题共40分,共 20 小题,每小题 2 分) 1. 公平、公正、公开、诚实信用是()。 A. 招标投标的原则 B. 评标的原则 C. 订立合同的原则 D. 监理活动的原则 2. 《招标投标法》规定,投标人递送投标文件的方式是( )。 A. 可以直接送达也可以通过邮寄方式送达 B. 只可以直接送达 C. 只可以通过邮寄方式送达 D. 只可以通过电文的方式送达 3. 国有投资占主体的、超过规定限额以上的建设工程项目应采用()方式发包。 A. 公开招标 B. 邀请招标 C. 协议发包 D. 直接发包 4. 为了便于投标和合同执行,联合体所有成员共同指定联合体一方作为联合体的牵头人或代表,并授权牵头人代表所有联合体成员负责投标和( )的主办协调工作。 A. 合同签订阶段 B. 准备合同签订阶段 C. 合同实施阶段 D. 合同保管阶段 5. 投标有效期是指()。 A. 在该期间内投标有效 B. 从获取招标文件起至递交投标文件止的那段时间 C. 从投标截止日起至公布中标者日止的那段时间 D. 在该期间内招标有效 6. 从发放招标文件起至接受投标文件止,不得少于()。 A. 10天 B. 15天 C. 20天 D. 30天 7. 建设项目总承包招投标,实际上就是()。 A. 工程施工招投标 B. 项目全过程招投标 C. 勘查设计招投标 D. 材料、设备供应招投标 8. 招标是()选择中标人并与其签订合同的过程,而()则是投标人力争获得实施合同的竞争过程。 A. 投标人;投标 B. 投标人;中标 C. 招标人;中标 D. 招标人;投标 9. 《工程建设项目招标范围和规模标准规定》要求,只要单项合同估算价100万元人民币以上的 ( )必须进行招标。 A. 施工 B. 重要设备、材料的采购 C. 勘察、设计服务的采购 D. 监理服务的采购 10. ( ),是指招标人出售招标文件或者发出投标邀请书前对潜在投标人进行的资格审查。 A. 资格审查 B. 资格预审 C. 资格调查 D. 资格审核 11. 直接费用指在施工中直接用于工程实体上的人工、材料、设备和施工机械使用费用的总和。下列不属于直接费用的是()。 A. 设备费 B. 临时设施费 C. 材料费用 D. 施工机械费 12. 邀请招标程序是直接向适于本工程的施工单位发出邀请,其程序与公开招标大同小异,不同点主要是没有()环节。 A. 资格预审 B. 招标预备会 C. 发放招标文件 D. 招标文件的编制和送审 13. 开标时判定为无效的投标文件,应当( )。 A. 不再进入评标 B. 在初评阶段淘汰 C. 在详评阶段淘汰 D. 在定标阶段淘汰 14. 不属于设计招标与其他招标在程序上的主要区别的是( ) 。 A. 招标文件的内容相同 B. 评标原则不同 C. 对投标书的编制要求不同 D. 开标形式不同15. 招标项目开标时,检查投标文件密封情况的应当是( )。 A. 投标人 B. 招标人 C. 招标代理机构人员 D. 招标单位的纪检部门人员 16. 招标单位可以委托具有相应资质的中介机构代理招标,此招标代理机构是( )。 A. 行政机关 B. 国家机关隶属机构 C. 依法成立的组织 D. 依法成立的协会
液压伺服 大作业
硕士学位课程考试试卷 考试科目:电液伺服控制 考生姓名:刘双龙 考生学号:20140713189 学院:机械工程学院专业:机械工程 考生成绩: 任课老师(签名) 考试日期:2014年1月20日午时至时
考试主题:电液伺服(比例)系统 考试题目: 1、为什么把液压控制阀称为液压放大元件? 2、什么叫阀的工作点?零位工作点的条件是什么? 3、电液伺服阀由哪几部分组成?各部分的作用是什么? 4、什么是液压固有频率?在阀控缸系统中液压固有频率与活塞位 置有关吗?为什么? 5、为什么电液伺服系统一般都要加校正装置? 6、结合自己研究领域,写一篇液压伺服系统建模、分析的论文, 字数不少于2000字。 注:要求独立完成,不允许抄袭。 交作业时间: 最迟2015年第一个学期的第一周交到7教136,交纸质档。
三自由度平台液压伺服系统建模 摘要: 我的专业是机械工程,主要方向是机械设计,所以本文选择了与我专业方向有关的一个机构进行建模。本文开始对机构进行了说明(采用已有的机构,并非自己设计),然后对其进行运动学分析,从而的到上平台和下平台的速度及加速度,和雅可比矩阵及液压缸速度。然后对驱动机构进行电液伺服系统建模。其中 一:自由度运动平台系统简介 本文所研究的三自由度运动平台类似与六自由度平台是由一个上平台(动平台)、地基(下平台)、三个支杆、三个线性作动器以及若干关节连接而成的。上平台装有负载,完成既定的位置、速度、加速度运动要求,进而实现刑于道路状况的复现。其结构示意图如图1.1所示。 图 1三自由度运动平台的结构图 该平台的结构如下:上平台与地面之间以三个支杆(strut)来约束并起支撑作用,并以三个液压缸作为驱动部件进行驱动。每个液压缸两端为关节轴承,中间为一个移动副和一个转动副连接;每根支杆两端也是采用关节轴承分别与地面和上平台相连中间一个转动副。通过计算可知每个支杆所在的支路都具有5个自由度,每个支路对上平台提供一个约束;每个液压作动器所在的支路都具有6个自由度,对于上平台没有约束。通过每个分支对上平台的约束很容易计算得出其自由度为3。因此,通过三套液压作动器的驱动,上平台能够实现对于给定运动的跟踪复现。 简单直观的对运动进行分析可得到:由于三根支杆的限制作用,上平台平动受到限制:而转动自由度相对更为自由,运动范围更大。当两竖直作动器差动动
重庆大学网教作业答案-工程招投标 ( 第3次 )
第3次作业 一、单项选择题(本大题共40分,共 20 小题,每小题 2 分) 1. 《招标投标法》规定,下列关于投标文件的送达和签收的表述中不正确的是( )。 A. 在招标文件要求提交投标文件的截止时间后送达的投标文件,招标人应当拒收 B. 招标人收到投标文件后,应当签收保存,不得开启 C. 投标人递送投标文件的方式只可通过直接送达方式 D. 如果投标文件没有按照招标文件要求送达,招标人可以拒绝受理 2. 施工招标中,为了规范建筑市场有关各方的行为,《建筑法》和《招标投标法》明确规定,一个独立合同发包的工作范围不可能是()。 A. 全部工程招标 B. 单位工程招标 C. 特殊专业工程招标 D. 分项工程招标 3. 采购的货物规格和标准统一、现货货源充足且价格变化幅度小的政府采购项目,经设区的市、自治州以上人民政府财政部门同意后,可以采用( )的方式采购。 A. 竞争性谈判 B. 询价 C. 邀请招标 D. 公开招标 4. 邀请招标的邀请对象的数目以( )家为宜。 A. 3 B. 5 C. 7 D. 5~7 5. 某建设项目的施工单项合同估算价为1000万元人民币,在施工中需要采用专有技术,该施工项目( )方式发包。 A. 应该采用公开招标 B. 应该采用邀请招标 C. 应该采用议标 D. 可以采用直接委托 6. 从发放招标文件起至接受投标文件止,不得少于()。 A. 10天 B. 15天 C. 20天 D. 30天 7. 标底编制程序应收集的资料不包括()。 A. 编制标底 B. 全套施工图纸与现场地质、水文、地上情况的有关资料 C. 招标文件 D. 领取标底价格计算书,报审的有关表格 8. 在招标投标基本程序中,投标人资格、评标标准和方法、合同主要条款等实质性条件和要求都要在( )环节得以确定 A. 投标 B. 评标 C. 开标 D. 招标 9. 招标人自行办理施工招标事宜的,应当具备的能力不包括()。 A. 有专门的施工招标组织机构 B. 有与工程规模、复杂程度相适应并具有同类施工招工招标经验 C. 熟悉有关工程施工招标法律法规的工程技术、概预算及工程管理了 D. 有进行招标项目的相应资金或者资金来源已经落实 10. 投标书中分别存在以下各项中对应的问题,你认为( )投标书不应当被作为废标处理。 A. 只有单位盖章而没有法定代表人或法定代表人授权的代理人盖章的B. 未按规定的格式填写,内容不全或关键字迹模糊、无法辨认的 C. 未按招标文件要求提交投标保证金的 D. 以联合体进行投标,未附有联合体各方共同投标协议的 11. 在评标委员会成员中,不能包括( )。 A. 招标人代表 B. 招标人上级主管代表 C. 技术专家 D. 经济专家 12. 国际联合承包的主要方式有三种,下列不属于其中之一的是()。 A. 工程项目合营公司 B. 合资公司 C. 联合集团 D. 独资公司 13. 从发放招标文件起至接受投标文件止,不得少于()。 A. 10天 B. 15天 C. 20天 D. 30天 14. ( )是以投标价为基础,将评审各要素按预定方法换算成相应价格值,增加或减少到报价上形成评标价。采购机组、车辆等大型设备时,较多采用此方法。 A. 最低投标价法 B. 最高投标价法 C. 综合评标价法 D. 综合投标价法
2020年徐州市公共科目一《人工智能与健康》考试试卷1
2020年徐州市公共科目一《人工智能与健康》考试试卷1 一、判断题(每题2分) 1.虚拟现实是一种将真实世界信息和虚拟世界信息“无缝”集成的新技术 正确 错误 2.在国外,还没有银行尝试利用人工智能技术通过客户表情分析提供投资决策 正确 错误 3.人工智能将融合大数据、云计算技术,对数据信息的收集、识别、判断实现实时处理 正确 错误 4.深度学习技术可利用海量金融交易数据,自动识别欺诈交易行为,进而实时拦截,以降低风险。典型应用场景有基于知识图谱技术的征信与风险控制、反欺诈等 正确 错误 5.智能保顾即智能化的保险顾问,它是基于客户自身的保险需要,通过算法和产品来完成保险顾问的服务,作为对比,这个服务以往通常是由人来实现的 正确
6.通过互联网及移动装置,智能保顾在线实时且随时随地为用户提供服务,满足互联网时代下用户的习性及需求,提升用户投保时的体验 正确 错误 7.通过AI分析技术与机器学习相互结合,极大地提高了医疗服务质量和预后 正确 错误 8.临床上,常规病理诊断方法需要大量人力成本,结果仍然缺乏质量保证。在AI基础上开发的病理诊断方法更加精确和具有可预测性。许多医疗机构正在尝试利用图像识别技术辅助癌症诊断 正确 错误 9.AI技术不可以用于辅助临床决策 正确 错误 10.Ginger.IO能够通过收集手机数据,推测用户生活习惯是否发生了变化,根据用户习惯来主动对用户提问 正确 错误 11.对电子健康档案数据的分析将在精确医学和癌症研究中发挥重要作用 正确
12.人类思维模式趋向于快思维(fast thinking)捷径,能够从少数样本、数据和碎片化信息中迅速得出普遍性结论的本能。但这种天赋并不适用于癌症和阿尔兹海默症等复杂疾病现象。深度学习则擅长识别潜在的模式和细节之间的联系正确 错误 13.人工智能技术是专家系统的一个分支。主要由包含大量规则的知识库和模拟人类推理方式的推理机组成。 正确 错误 14.最贴近市民的健康保障是智慧家庭医疗系统 正确 错误 15.人工智能是人类一直以来的梦想 正确 错误 二、单项选择(每题2分) 16.智能医疗可以实现实现患者与医生、医院以及什么之间的联系与互动 护士 药房 医疗设备 手术室
重庆大学网教作业答案-建设项目评估 ( 第2次 )
第2次作业 一、单项选择题(本大题共50分,共 20 小题,每小题 2.5 分) 1. 年数总和法的折旧基数是() A. 固定资产原值 B. 固定资产原值-预计净残值 C. 账面净值 D. 固定资产重估价值 2. 社会评估的步骤有: a确定评估目标范围,b选择评估指标,c调查预测,d 选择最优方案,e建立评估小组,f制定备选方案,g评估总结,h专家论证,i 进行预测评估,以下社会评估步骤排序正确的是() A. eabdhgcfi B. ebacfidhg C. eabcfidhg D. eabfcidhg 3. 用试算插值法计算财务内部收益率,已知i1=16%,FNPV1=20, i2=18%,FNPV2=-80,则该项目的财务内部收益率FIRR=() A. 15.6% B. 16.4% C. 17.6% D. 18.4% 4. ()是指在某个行业的产品在一定时期内可达到的市场销售量 A. 实际销售量 B. 潜在需求量 C. 市场潜量 D. 销售潜量 5. 可用于筹集资本金的方式是() A. 银行贷款 B. 融资租赁 C. 合作开发 D. 出口信贷 6. 你正在为你的项目识别可能的风险,该项目是开发一种便携旅行凳,可以用在旅行途中,作为休息用的凳子。你需要首先识别并列出所有可能的风险,再对这些风险进行定性和定量的分析。虽然可以利用许多技术,但是在风险识别中可能最常用的是() A. 面谈 B. 概率/影响分析 C. 风险清单 D. 头脑风暴法 7. 大型项目详细可行性研究研究费用一般占总投资额的() A. 0.05%-0.2% B. 0.2%-1.0% C. 1.0%-2.0% D. 2.0%-3.0%
车辆系统动力学仿真大作业(带程序)
Assignment Vehicle system dynamics simulation 学院:机电学院 专业:机械工程及自动化 姓名: 指导教师:
The model we are going to analys: The FBD of the suspension system is shown as follow:
According to the New's second Law, we can get the equation: 2 )()(221211mg z z c z z k z m --+-=???? 221212)()(z k mg z z c z z k z m w +-----=? ??? 0)()()()(222111222111=-++--+-++--+? ? ? ? ? ? ? ?w w w w z L z k z L z k z L z c z L z c z m χχχχ 0)()()()(2222111122221111=-++----++---? ? ? ? ? ? ? ?w w w w z L z L k z L z L k z L z L c z L z L c J χχχχχ d w w w w Q z L z k z L z c z m ,111111111)()(-=------? ? ? ? ?χχ d w w w w Q z L z k z L z c z m ,222222222)()(-=-+--+-? ????χχ When there is no excitation we can get the equation: 2)()(221211mg z z c z z k z m --+-=???? 2 21212)()(z k mg z z c z z k z m w +-----=? ??? Then we substitude the data into the equation, we write a procedure to simulate the system: Date: ???? ?? ??? ??==?==?===MN/m 0.10k m 25.1s/m kN 0.20MN/m 0.1m kg 3020kg 2100kg 3250w 2l c k I m m by w b
重庆大学网教作业答案-计算机基础 ( 第3次 )
第3次作业 一、简答题(本大题共100分,共 20 小题,每小题 5 分) 1. Windows XP操作系统中,如何打开计算器。 2. Windows 7操作系统中,复制与移动文件或文件夹可以通过哪些方式实现? 3. Windows 7操作系统中,如何恢复被删除的文件或文件夹。 4. 在PowerPoint中,怎样在幻灯片播放的时候做标记? 5. 请简述PowerPoint 2010中进入幻灯片母版的方法。 6. 请简述睡眠与休眠的相同点和不同点。 7. 在PowerPoint中,幻灯片放映时怎么实现排练计时? 8. Windows 7操作系统中,如何打开计算器。 9. 请简述进入幻灯片母版的方法。 10. Windows 7操作系统中,对文件或文件夹进行重命名可以通过那些途径实现? 11. 请简述计算机安全的定义。 12. 简述CPU主要性能技术指标。 13. 请简述计算机木马的防治措施。 14. 请简述计算机的五大组成部分。 15. 简述在Windows 7中,何处可以找到系统还原向导。 16. 请简述Excel的主要功能。 17. 请简述操作系统的工作任务。 18. 请简述如何在Excel 2010中插入公式与函数? 19. 请简述拒绝服务攻击的原理。 20. 在Excel中,请简述添加或删除水平分页线的方法。 答案: 一、简答题(100分,共 20 题,每小题 5 分) 1. 参考答案: 开始→所有程序→附件→计算器。 解题方案: 参见Windows XP操作系统计算器应用程序相关内容。 评分标准: 2. 参考答案: 一、使用菜单操作;二、利用快捷菜单操作;三、用鼠标拖动文件或文件夹进行操作。
重大版小学信息技术六年级下册教学参考
小学信息技术六年级下册教学参考 六年级下册是程序设计入门教学单元。通过对现代机器人的初步了解,导入本模块的教学,要求学生初步掌握使用ELOGO命令、语法及程序设计的基本方法。培养学生对程序设计的基本认识和抽象逻辑思维能力。 【本模块教学总目标】 1.要求学生初步了解中文程序设计语言易乐谷(ELOGO)的主要命令及用法,通过进退转向、重复、粗细颜色、子程序、递归等命令及方法的学习和体验,能运用ELOGO绘制简单图案,并能初步综合运用ELOGO绘制、设计、创作简单程序作品(如折扇图案、花布图案等)。 2.培养学生学习使用ELOGO设计程序的兴趣和能力,提高学生的抽象思维和逻辑分析能力。 3.通过学习程序语言的命令语法和分析设计,培养学生综合分析、设计程序的能力。 【软件版本说明】 易乐谷“ELOGO”是一个以LOGO语言语法为基本语法规则,易语言中文化为实现目标,以流程图为教学辅助,提供幼儿园、小学、退休人员及小学教学师作为入门级学习编程的一种简单工具。本程序由大连大有吴涛易语言软件开发有限公司向幼儿园、小学校、教师、退休人员等提供。目前本模块采用的是ELOGO V1.5版(下载地址:https://www.360docs.net/doc/d217037253.html,. cn/elogo/edown/ELOGO/ELOGOINS1.5.rar)。 LOGO语言是一种早期的编程语言,也是一种与自然语言非常接近的编程
语言,它通过“绘图”的方式来学习编程,对初学者特别是儿童进行寓教于乐的教学。 第13课聪明的机器人 【教学目标】 1.初步认识机器人。 2.初步了解机器人在人们生活中的广泛应用。 3.通过对机器人的了解,激励学生对编写程序的兴趣。 【重难点分析】 教学重点:通过对不同机器人的了解,认识机器人在现代社会中的重要性。 教学难点:初步认识什么是机器人的概念。 【教学建议】 1.教师应多收集一些有关机器人的资料,通过有关机器人的图片、视频的展播,尽量让学生对机器人的感知。 2.可以通过学生上网收集有关机器人的信息,探讨机器人在人们生活中的广泛应用。 3.形体、控制程序、程控动作是机器人的几个要素,在认识机器人的同时,要破除对机器人的神秘感。其实,机器人是人们通过程序控制的,真正聪明的是人。激励学生从小热爱科学的热情。 第14课初识ELOGO 【教学目标】
重庆大学网教作业答案-大学英语(3) ( 第1次 )
第1次作业 一、语法结构题(本大题共100分,共 40 小题,每小题 2.5 分) 1. She arranged a party to help put the strangers at their____. A. pleasure B. ease C. peace D. delight 2. The boy wanted to ride his bicycle in the street, but his mother told him ________. A. not to B. not to do C. not do it D. do not to 3. Douglas Ackerman was forced to threaten____ to the public if Don McCoy insisted on criticizing his policy.
A. appealing B. to appeal C. in appealing D. to appealing 4. Every one could see ______ was happening and ______ George was already ready. A. what; / B. what; that C. that; that D. that; / 5. A series of measures____, people in that area managed to survive the severe famine. A. having taken B. were taken C. having been taken D. have been made 6.