SACS操作流程

SACS 操作流程
静力部分
建模流程简叙
.1启动程序
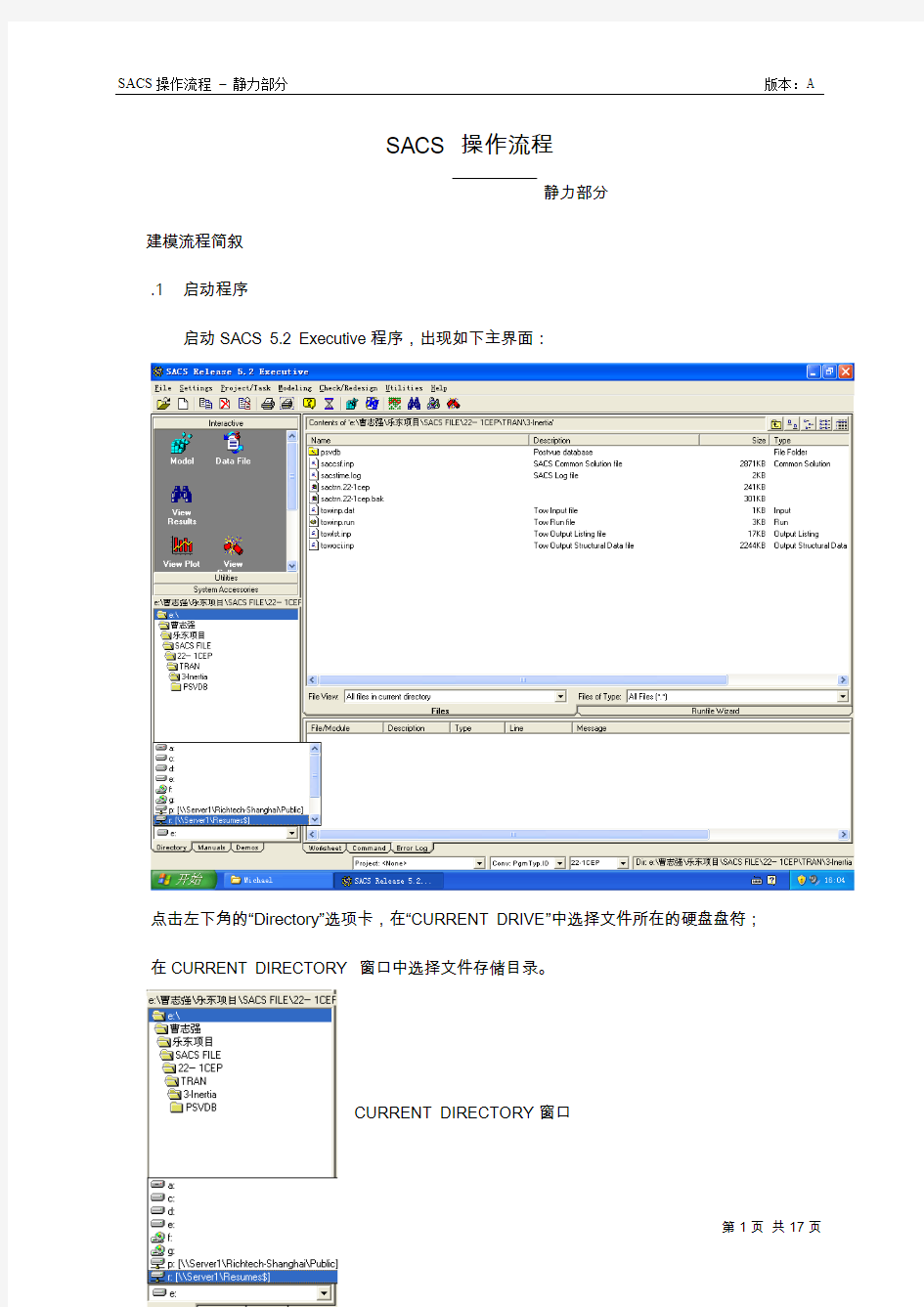
启动SACS 5.2 Executive程序,出现如下主界面:
点击左下角的“Directory”选项卡,在“CURRENT DRIVE”中选择文件所在的硬盘盘符;在CURRENT DIRECTORY 窗口中选择文件存储目录。
CURRENT DIRECTORY窗口
CURRENT DRIVE 选项框
双击“INTERACTIVE”窗口中的“MOEL”按纽,出现如下界面:
选择“Create new model”,点击“OK”按纽确认。出现如下界面:
在“TITLE”文本输入框中输入项目名称“SACS EXAMPLE PROJECT”,在“STRUCTURE WIZARD”中选择“JACKET “(导管架)类型,使用向导建模。根据向导出现的界面,依次输入以下数据:
根据以上步骤,已建立了导管架的主框架,见下图,我们可以根据设计图纸或设计思路,接下
来建更详细的模型。灵活的运用向导可以节省建模的时间。尤其是对于有斜度的导管架、塔等采用向导建模会相对简单些,且不容易出错。
通用的建模规则
.1点的建立
2.1.1点坐标系的定义
一般以平台轴线围成的四边形的中心作为原点;
X轴:平台北向为X轴正向;
Y轴:平台东向为Y轴正向;
Z轴:垂直水面向上为Z轴正向,零点为海图面;
2.1.2 点的命名
一个平台整个模型包括有很多模块,大概有成千上万个点构成,为方便建模(模型的导入等)及校对,有序的点编号将使模型变得有条理,便于管理。根据以往设计的经验对整个平台每个模块结构上的点的命名进行了规范。
●导管架点的命名规则
以下我们以四条腿的导管架举例来说明导管架点的命名方法:
1、导管架腿上的点命名以xxxL(L代表leg),第一个x为其导管架的层数。后
两个根据实际需要编号;
2、每层平面内点的命名以Hxxx(H代表HORIZONTAL),第一个x为层数。
后两个xx根据实际需要编号;
3、对立面上x支撑的交点的命名以Xxxx(x代表x-brace)第一个x跟第二
个x代表上下两层的层数,第三个x根据实际情况编号;
●上部组块点的命名规则
以下我们以四条腿的上部组块举例来说明上部组块点的命名方法:
1、上部组块上的点命名以A(B/C/D..)xxx(L代表leg),第一个字母表示层数,
第一层为A开头,第二层为B开头依次类推,第二、三不用字母,均使用数字
编号,如果表示的点是在腿上,则最后一个数字用L表示。
●生活楼点的命名规则
生活楼上的点命名以Lxxx(L代表living quarter),第二个字母表示层数,第一
层为1开头,第二层为2开头依次类推,第二、三根据需要编号。
●火炬臂点的命名规则
火炬臂上点命名以FBxx(FB代表FLARE BOOM),第三个x与第四个x根据需
要进行编号。
●靠船帮的命名规则
靠船帮上点命名以BBxx(BB代表BARGEBUMP),第三个x与第四个x根据需
要进行编号。
●登船件的命名规则
登船件上点命名以BLxx(BL代表BOATLANDING),第三个x与第四个x根据
需要进行编号。
2.1.3 点的自由度
对点,Sacs 程序中“1”表示约束,如111000表示简支。
●主结构上的点均设计成刚性节点(默认为刚节点);
●对导管架泥线处与桩相连接的点设计成PILEHD;
●如果对上部模块或者生活楼单独分析时,支点一般设计成简支;
●当进行吊装分析时,吊点一般为固结(111111);
●进行动态分析时,需将定义主节点自由度:(222000);
.2杆件的建立
根据建立的点,用sacs 程序菜单中的member/add即可以添加杆件。当然这只是最基础的一步。接下来要对杆件属性进行赋值。
2.2.1 杆件的命名规则
杆件的命名一般是通过杆件的组来区分,通过先定义截面来定义组,一个组里可能
包括几个不同的截面。
●导管架杆件的命名规则
以下我们以四条腿的导管架举例来说明导管架点的命名方法:
1、导管架腿上杆件的命名以Lxx(L代表leg),第一个x为其导管架的层数相对
应;
2、每层水平杆件的命名以Hxx(H代表HORIZONTAL),第一个x为层数。如
果对同一个导管架,水平杆件的数量和规格都比较多,第一个x可以不表
示层数。
3、对立面上x支撑或k支撑命名以Vxx(V代表VERTICAL),第一个x为其
所在的那个面的标号,如在row A面,则x为A。
4、对CONDUCTOR一般以CNx命名;
5、对PUMP CASSION 一般以CSx命名;
6、对riser camp 一般以RCX命名;
7、对桩靴一般以PSx命名;
8、靠船帮的命名规则
靠船帮上杆件命名以BBx(BB代表BARGEBUMP),x代表不同的杆件类
型。
9、登船件的命名规则
登船件上杆件命名以BLx(BL代表BOATLANDING),x代表不同的杆件类
型。
●上部组块杆件的命名规则
上部组块杆件的定义,梁一般采用Bxx定义,柱采用Pxx来定义;
●生活楼杆件的命名规则
生活楼杆件的定义,梁一般采用Hxx定义,柱采用Cxx来定义;
●火炬臂杆件的命名规则
火炬臂杆件的定义,梁一般采用FBx定义;
注:同一个组可以通过定义不同的段来定义不同的截面。这样可以减少组数,便于模型管理。
2.2.2 杆件的偏移
为使建立的模型跟实际的结构相似,我们需要对建立的杆件进行一定的偏移,如在模型中一般是以梁的中心为基准线,而实际建立模型是以梁的上表面做为基准面的。
一般来说需要偏移的杆件有:
●梁的基准面的偏移;
●梁与柱连接,梁端部的偏移;
●柱与梁的连接,柱端部的偏移;
一般来说,对梁和柱进行偏移对结构的受力是有利的,一方面减少了结构的重量,一方面可以减小结构件的有效长度。
2.2.3 杆件的有效长度
杆件有效长度的定义,对计算是有很大的影响的,为使计算的结果更加准确,根据API规范要求,一般我们采用如下定义;
●Ky为平面内有效长度系数;
●Kz为平面外有效长度系数;
Kz与Ky的详细规定可参见API规范。
●Lb为面板的无支撑长度;
对梁上面有板的梁一般Lb很小,可定义
1m或者更小。其不起控制作用。
2.2.4 杆件的约束
通过杆件约束的定义,可以改变杆件的受
力方式,SACS程序用“0“对杆件端点的
约束,“1“表示释放。
如
吊绳杆件两端约束的定义为:
“000111”与“000011“;
Wishbone杆件两端约束的定义为:
“000000“与“100111”;
注:在进行部分工况分析时,需考虑腐蚀余量对杆件属性的修改
.3加载
荷载的定义是建模的重要的环节,加载的准确性将直接影响计算的正确性。对sacs 程序,加载可以通过界面操作完成,也可通过编辑文本文件来定义载荷。荷载的大小要符合业主规格书的要求,如业主没有明确的要求,荷载的大小可根据经验估算。
2.3.1一般载荷
●结构自重;无需加载,系统可自动计算;
●没有模拟的次要构件的重量将根据结构所在的位置,加到结构上,如:
导管架部分:riser的重量、扶梯的重量、阴极块的重量、抓桩器的重量等;
上部组块部分:小梁的重量(对基本设计)、扶梯的重量,墙面的重量等。
●管线、设备重量;根据其他专业提供的条件将其加入到模型中;
●活荷载;活荷载一般包括有:走道面载、设备活载等。
2.3.2 环境载荷
环境载荷,我们可以单独的作个海况文件来定义,也可在模型文件里直接定义。
●水压力;程序自动计算;
●海生物的定义;根据规格书要求来定义;
●风浪流的定义;其大小可根据规格书要求来定义,作用面积则要根据实际结构
来定。
●冰载荷的定义;
.4载荷工况组合
荷载的工况组合,一般在结构说明书中(业主要求)有相应的要求及说明。下面列举了IN-PLACE工况需要考虑的几个荷载组合。
2.4.1 正常操作工况:
结构重+100%活荷载+正常操作工况海况荷载(一般8个方向)+修井机荷载(考虑方向)+钻井机(考虑方向)+吊机载荷(考虑方向)
2.4.2 极端工况(一般):
结构重+75%活荷载+正常操作工况海况荷载(一般8个方向)+修井机荷载(自重)+钻井机(考虑方向)+吊机载荷(无吊重)
2.4.3 极端工况(抗拔):
结构重+50%活荷载+正常操作工况海况荷载(一般8个方向)+修井机荷载(自重)+钻井机(考虑方向)+吊机载荷(无吊重)
注:在模型文本文件中,为方便校对及以后的查找修改,建议对文本文件中每一个重要的信息或者不同类别的信息的输入进行说明标识。
各种工况分析概述
.1静力分析(static analysis)
3.1.1 分析流程:
3.1.2 建模分析中的重点及难点:
●模型文件要符合建模的一般规则;
●对因考虑腐蚀而将导管架上的杆件直径减小的杆件,在海况文件中应通过
GROUP OVERRIDE 或者MEMBER OVERRIDE 复原;同时可以定义截面的
面积还原杆件的重量;
●桩土文件输入
1.保证输入数据的准确性。可以通过单独运行single pile analysis 来分析,直
观的分析输入数据的准确性;
2.注意单位的统一。
.2地震分析(earthquake analysis)
3.2.1 分析流程:
●第一步静态分析:
分析方法同静力分析,要求生成dynsef文件及psicsf文件。
●第二步模态分析:
采用extract mode shapes 模块进行分析。
1.要求输入文件:a、第一步生成的dynsef文件;b、dyninp文件;c、动态
模型文件;
2. 要求输出文件:a、dynmod文件;b、dynmas文件;
●第三步响应普分析:
采用earthquake 模块进行分析。
1.要求输入文件:a、第二步生成的dynmod文件及dynmas文件;b、第一
步生成的psicsf文件;c、第一步生成的dyrinp文件;
2. 要求输出文件:a、dyrlst文件;b、dyrcsf文件;
●第四步后处理,生成结果文件:
采用element stress and code check 模块进行分析。
1.要求输入文件:a、第三步生成的dyrcsf文件;b、pstinp文件;
2. 要求输出文件:a、pstlst文件;
采用joint can tubular connection check 模块进行分析。
1.要求输入文件:a、第三步生成的dyrcsf文件;b、JCNINP文件;
2. 要求输出文件:a、jcnlst文件;
3.2.2 建模分析中的重点及难点:
●进行动态分析时要将主节点的约束设置成“222000”;
●动态的模型文件时要说明是动态分析“加入dyn“。
●准确的模拟等效桩,需要比较准确的将底部剪力或弯矩跟实际地震时的底部剪
力或弯矩等效,误差小于5%。
.3疲劳分析(fatigue analysis)
3.3.1 分析流程:
●第一步静态分析:
分析方法同静力分析,要求生成dynsef文件及psicsf文件。
●第二步模态分析:
采用extract mode shapes 模块进行分析。
1.要求输入文件:a、第一步生成的dynsef文件;b、dyninp文件;c、动态
模型文件;
2. 要求输出文件:a、dynmod文件;b、dynmas文件;
●第三步波浪响应普分析:
采用wave response 模块进行分析。此分析需根据业主要求,一般为八个方向,
对每个单独的方向。
1.要求输入文件:a、第二步生成的dynmod文件及dynmas文件;b、第一
步生成的psicsf文件;c、第一步生成的wvrinp文件;d、模型文件;
2. 要求输出文件:a、WVRNPF文件(传递函数);b、SACCSF文件;
●第四步后处理,生成结果文件:
采用fatigue damage 模块进行分析。
1.要求输入文件:a、第三步生成的SACCSF文件;b、ftginp文件;
2. 要求输出文件:a、ftglst文件;
3.3.2 建模分析中的重点及难点:
●进行动态分析时要将主节点的约束设置成“222000”;
●动态的模型文件时要说明是动态分析“加入dyn“。
●第三步分析,模型文件中的波浪的周期的选择在接近平台一阶周期的区域中取
的波浪要相对多些。
●第四步分析时,要求在选择第三步分析结果时与第四步输入的波浪普一致。