用霍尔位置传感器测定固体材料的杨氏模量

实验 霍尔位置传感器测杨氏模量
实验目的
1.熟悉霍尔位置传感器的特性; 2.弯曲法测量黄铜的杨氏模量;
3.测黄铜杨氏模量的同时,对霍尔位置传感器定标; 4.用霍尔位置传感器测量可锻铸铁的杨氏模量。
实验仪器
1.霍尔位置传感器测杨氏模量装置一台 (1)读数显微镜
型号 10-JC 型
放大倍数 20
分度值 mm 01.0 测量范围 mm 60~
(2)砝码 g 0.10 8块、g 0.20 2块
(3)95型集成霍尔位置传感器 (4)样品(铜板和冷扎板)
2.霍尔位置传感器输出信号测量仪(放大倍数3---5倍)一台(包括直流数字电压表
mV 2000~)
。 实验原理
1. 霍尔位置传感器
霍尔元件置于磁感应强度为B 的磁场中,在垂直于磁场方向通以电流I ,则与这二者 相垂直的方向上将产生霍尔电势差H U :
B I K U H ??= (1)
(1)式中K 为元件的霍尔灵敏度。如果保持霍尔元件的电流I 不变,而使其在一个均匀梯度的磁场中移动时,则输出的霍尔电势差变化量为:
Z dZ
dB
I K U H ???
?=? (2) (2)式中Z ?为位移量,此式说明若dZ
dB
为常数时,H U ?与Z ?成正比。
为实现均匀梯度的磁场,可以如图1所示,两块相同的磁铁(磁铁截面积及表面磁感应强度相同)相对放置,即N 极与N 极相对,两磁铁之间留一等间距间隙,霍尔元件平行于磁铁放在该间隙的中轴上。间隙大小要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。磁铁截面要远大于霍尔元件,以尽可能的减小边缘效应影
响,提高测量精确度。
若磁铁间隙内中心截面处的磁感应强度为零,霍尔元件处于该处时,输出的霍尔电势差应该为零。当霍尔元件偏离中心沿Z 轴发生位移时,由于磁感应强度不再为零,霍尔元件也就产生相应的电势差输出,其大小可以用数字电压表测量。由此可以将霍尔电势差为零时元件所处的位置作为位移参考零点。
霍尔电势差与位移量之间存在一一对应关系,当位移量较小(mm 2<),这一对应关系具有良好的线性。
2.杨氏模量
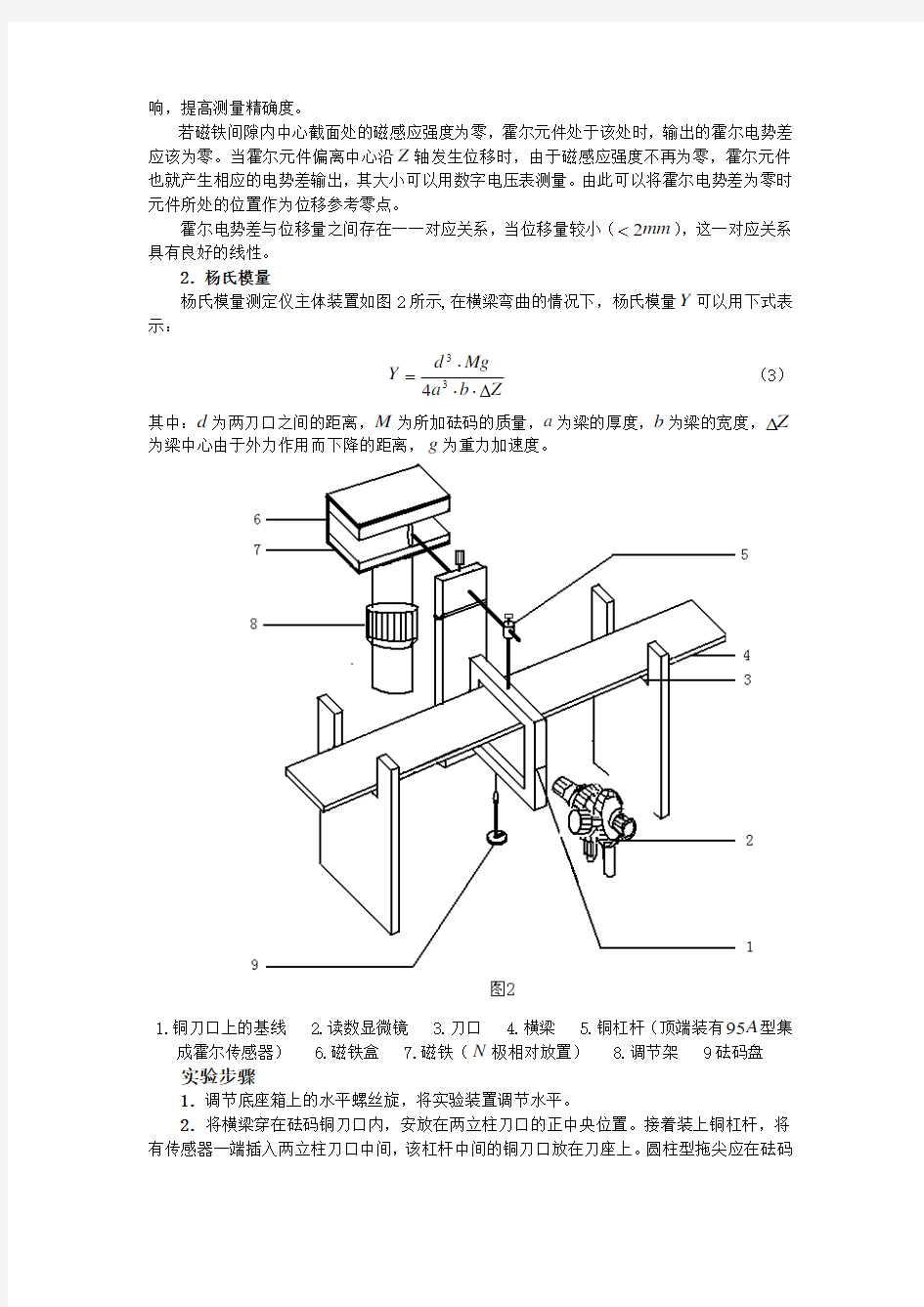
杨氏模量测定仪主体装置如图2所示,在横梁弯曲的情况下,杨氏模量Y 可以用下式表示:
Z
b a Mg
d Y ????=3
34 (3) 其中:d 为两刀口之间的距离,M 为所加砝码的质量,a 为梁的厚度,b 为梁的宽度,Z ?为梁中心由于外力作用而下降的距离,g 为重力加速度。
1.铜刀口上的基线
2.读数显微镜
3.刀口
4.横梁
5.铜杠杆(顶端装有A 95型集
成霍尔传感器) 6.磁铁盒 7.磁铁(N 极相对放置) 8.调节架 9砝码盘
实验步骤
1.调节底座箱上的水平螺丝旋,将实验装置调节水平。
2.将横梁穿在砝码铜刀口内,安放在两立柱刀口的正中央位置。接着装上铜杠杆,将有传感器一端插入两立柱刀口中间,该杠杆中间的铜刀口放在刀座上。圆柱型拖尖应在砝码
刀口的小圆洞内,传感器若不在磁铁中间,可以松弛固定螺丝使磁铁上下移动,或者用调节架上的套筒螺母旋动使磁铁上下微动,再固定之。注意杠杆上霍尔传感器的水平位置(圆柱体有固定螺丝)。
3.将铜杠杆上的三眼插座插在立柱的三眼插针上,用仪器电缆一端连接测量仪器,另一端插在立柱另外三眼插针上;接通电源,调节磁铁或仪器上调零电位器使在初始负载的条件下仪器指示处于零值。大约预热十分钟左右,指示值即可稳定。
4.调节读数显微镜目镜,直到眼睛观察镜内的十字线和数字清晰,然后移动读数显微镜使通过其能够清楚看到铜刀口上的基线,再转动读数旋纽使刀口点的基线与读数显微镜内十字刻线吻合。
实验内容
1. 传感器定标(测量k ) 和计算铜的杨氏模量
用铜板做实验样品,逐次增加砝码M ,(每次增加20g 砝码),从读数显微镜上读出
相应的梁的位置i Z 及数字电压表相应的读数值U i (单位mv),以便于计算杨氏模量和对霍耳位置传感器进行定标。将测量数据记录在如下表格中
压表相应的读数值U (单位mv),将铸铁的测量数据记录在如下的表格中 3.测量横梁两刀口间的长度d 及测量不同位置横梁宽度b 和横梁厚度a 。
数据处理
1. 用作图法和最小二乘法求k ,
2. 计算铜和铸铁的杨氏模量。
思考题
1. 弯曲法测量杨氏模量实验,主要测量误差有哪些?
2. 用霍尔位置传感器法测量位移有什么优点?
注意事项
1.梁的厚度必须测准确。在用千分尺测量黄铜厚度a 时,将千分尺旋转时,当将要与金属接触时,必须用微调轮。当听到答答答三声时,停止旋转。有个别学生实验误差较大,其原因是千分尺使用不当,将黄铜梁厚度测得偏小;
2.读数显微镜的准丝对准铜挂件(有刀口)的标志刻度线时,注意要区别是黄铜梁的边沿,还是标志线;
3.霍尔位置传感器定标前,应先将霍尔传感器调整到零输出位置,这时可调节电磁铁盒下的升降杆上的旋钮,达到零输出的目的,另外,应使霍尔位置传感器的探头处于两块磁铁的正中间稍偏下的位置,这样测量数据更可靠一些;
4.加砝码时,应该轻拿轻放,尽量减小砝码架的晃动,这样可以使电压值在较短的时间内达到稳定值,节省了实验时间;
5.实验开始前,必须检查横梁是否有弯曲,如有,应矫正。
附录:
固体、液体及气体在受外力作用时,形状与体积会发生或大或小的改变,这统称为形变。当外力不太大,因而引起的形变也不太大时,撤掉外力,形变就会消失,这种形变称之为弹性形变。弹性形变分为长变、切变和体变三种。
一段固体棒,在其两端沿轴方向施加大小相等、方向相反的外力F ,其长度l 发生改变
l ?,以S 表示横截面面积,称
S F 为应力,相对长变l
l ?为应变。在弹性限度内,根据胡克定律有:
l
l
Y S F ??= Y 称为杨氏模量,其数值与材料性质有关。
以下具体推导式子: Z
b a Mg
d Y ????=3
34; 在横梁发生微小弯曲时,梁中存在一个中性面,面上部分发生压缩,面下部分发生拉伸,所以整体说来,可以理解横梁发生长变,即可以用杨氏模量来描写材料的性质。
如图所示,虚线表示弯曲梁的中性面,易知其既不拉伸也不压缩,取弯曲梁长为dx 的一小段:
设其曲率半径为)(x R ,所对应的张角为θd ,再取中性面上部距为y 厚为dy 的一层面为研究对象,那么,梁弯曲后其长变为θd y x R ?-))((,所以,变化量为:
dx d y x R -?-θ))((
又 )
(x R dx
d =
θ; 所以 dx x R y dx x R dx
y x R dx d y x R )
()()
)(())((-=--=-?-θ; 所以应变为: )
(x R y
-
=ε; 根据虎克定律有:
)
(x R y
Y dS dF -=; 又 dy b dS ?=;
所以 dy x R y
b Y x dF )
()(??-
=; 对中性面的转矩为: dy y x R b Y y dF x d ??=
?=2
)
()(μ; 积分得: ?
-???=
??=
22
3
2)
(12)()(a a x R a b Y dy y x R b Y x μ; (1) 对梁上各点,有:
[]
2
3
2)(1)
()
(1
x y x y x R '+''=;
因梁的弯曲微小: 0)(='x y ;
所以有: )
(1
)(x y x R ''=
; (2) 梁平衡时,梁在x 处的转矩应与梁右端支撑力2Mg
对x 处的力矩平衡, 所以有: )2
(2)(x d
Mg x -=μ; (3)
根据(1)、(2)、(3)式可以得到:
)2
(6)(3
x d
a b Y Mg x y -??=
''; 据所讨论问题的性质有边界条件; 0)0(=y ;0)0(='y ; 解上面的微分方程得到:
);312
(3)(3
23x x d a b Y Mg x y -??=
将2
d
x =
代入上式,得右端点的y 值: 3
3
4a b Y d Mg y ???=;
又 Z y ?=;
所以,杨氏模量为: Z
b a Mg
d Y ????=334
金属的杨氏模量的测量
金属的杨氏模量的测量 当固体受外力作用时,它的体积和形状将要发生变化,这种变化,称为形变。当外力不太大时,物体的形变与外力成正比,且外力停止作用物体立即恢复原来的形状和体积,这种形变称为弹性形变。当外力较大时,物体的形变与外力不成比例,且外力停止作用,物体形变不能恢复原来的形状和体积,这种形变称为范性形变。范性形变的产生,是由于物体形变而产生的内应力超过了物体的弹性限度的缘故。如果再继续增大外力,物体内产生的内应力将会超过物体的强度极限时,物体便被破坏了。 固体材料的弹性形变可以分为纵向、切变、扭转、弯曲等,对于纵向弹性形变可以引入杨氏模量来描述材料抵抗形变的能力。杨氏模量是反映材料形变与内应力关系的一个重要的物理量。杨氏模量越大,越不易发生形变。杨氏模量一般只与材料的性质和温度有关,与其几何形状无关。材料杨氏模量测量方法很多,有静态法和动态法。对于静态法来说,又可分为拉伸法和弯曲法。 I .拉伸法测定钢丝的杨氏弹性模量 【实验目的】 1. 学会用拉伸法测定钢丝的杨氏弹性模量。 2. 掌握几种长度测量工具的使用方法及其不确定度的分析和计算。 3. 进一步掌握逐差法、作图法和最小二乘法的数据处理方法。。 【实验仪器】 杨氏模量测量仪、螺旋测微器、钢卷尺、读数显微镜装置等。 【实验原理】 一、拉伸法测金属丝的杨氏弹性模量 设有一根粗细均匀的金属丝,长度为L,截面积为S ,将其上端紧固, 下端悬挂质量为m的砝码。当金属丝受外力F= mg作用而发生形变L时,金属丝受外力作用发生形变而产生的内应力RS,其应变为LL,根据虎克
定律有:在弹性限度内,物体的应力 F 「S 与产生的应变成正比,即 Fl S L 式中E 为比例恒量,将上式改写为 L F EwlL 其中E 为该材料的杨氏弹性模量 (又称杨氏模量) 变的应力。实验证明,杨氏模量 E 与外力 F 、金属丝的长度L 、横截面积S 的 大小无关,它只与制成金属丝的材料有关。 1 若金属丝的直径为d ,则S = - Q ?d 2 ,将其代入(I .2 )式中可得 4 4F L 二 d 2 .丄 (I .3 )式表明,在长度、直径和所加外力相同的情况下,杨氏模量大的金属丝 伸长量较 小,杨氏模量小的金属丝伸长量较大。 因此,杨氏模量反映了材料抵抗 外力引起的拉伸(或压缩)形变的能力。实验中,测量出 F 、L 、d 和厶L 值就 可以计算出金属丝的杨氏模量 E 。其中F 、L 、d 都可用一般方法测得,唯有 L 是一个微小的变化量,约 10‘mm 数量级,用普通量具如钢尺或游标卡尺 是难以测准的。因此,实验的核心问题是对微小变化量 L 的测量。在本实验 中用读数显微镜测量(也可利用光杠杆法或其他方法测量) 二、杨氏模量测量仪 杨氏模量测量仪的基本结构如图1所示。在一个较重的三脚底座上固定有两 根立柱,支柱上端有横梁,中部紧固一个平台,构成一个刚度极好的支架。整个 支架受力后变形极小,可以忽略。通过调节三角底座的水平调节螺母13使整个支 架铅直。待测样品是一根粗细均匀的金属丝(长约 90Cn )O 金属丝上端用上端紧 固座2夹紧并固定在上横梁上,钢丝下端也用一个钳形平台5夹紧并穿过平台的中 心孔,使金属丝自由悬挂。钢丝的总长度 L 就是从上端固定座2的下端面至钳形 平台5的上端面之间的长度。钳形平台5下方的挂钩上挂一个砝码盘,当盘上逐次 加上一定质量的砝码后,钢丝就被拉伸,标尺刻线6也跟着下降。读数标尺9相对 (I .1 ) (I .2 ) ,在数值上等于产生单位应 (I ?3 )
2、霍尔位置传感器及弯曲法杨氏模量的测定
实验二 霍尔位置传感器及弯曲法杨氏模量的测定 实验原理 本实验在弯曲法测量固体材料杨氏模量的基础上,加装了霍尔位置传感器。通过霍尔位置传感器的输出电压与位移量线性关系的定标和微小位移量的测量,使学生了解和掌握微小位移的非电量电测新方法。 实验原理 1、 霍尔位置传感器 霍尔元件置于磁感应强度为B 的磁场中,在垂直于磁场方向通以电流I ,则与这二者 相垂直的方向上将产生霍尔电势差H U : B I K U H ??= (1) (1)式中K 为元件的霍尔灵敏度。如果保持霍尔元件的电流I 不变,而使其在一个均匀梯度的磁场中移动时,则输出的霍尔电势差变化量为: Z dZ dB I K U H ??? ?=? (2) (2)式中Z ?为位移量,此式说明若dZ dB 为常数时,H U ?与Z ?成正比。 图1 为实现均匀梯度的磁场,可以如图1所示,两块相同的磁铁(磁铁截面积及表面磁感应强度相同)相对放置,即N 极与N 极相对,两磁铁之间留一等间距间隙,霍尔元件平行于磁铁放在该间隙的中轴上。间隙大小要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。磁铁截面要远大于霍尔元件,以尽可能的减小边缘效应影响,提高测量精确度。 若磁铁间隙内中心截面处的磁感应强度为零,霍尔元件处于该处时,输出的霍尔电势差应该为零。当霍尔元件偏离中心沿Z 轴发生位移时,由于磁感应强度不再为零,霍尔元件也就产生相应的电势差输出,其大小可以用数字电压表测量。由此可以将霍尔电势差为零时元件所处的位置作为位移参考零点。 霍尔电势差与位移量之间存在一一对应关系,当位移量较小(mm 2<),这一对应关系具有良好的线性。
霍尔电流传感器的电路设计
一种霍尔电流传感器的电路设计 设计了一种零磁通型霍尔电流传感器,可广泛应用于交流变频驱动、焊接电源、开关电源、不间断电源等领域。该零磁通型霍尔电流传感器通过砷化镓霍尔元件检测由通电电流产生的磁场,继而有效地检测被测电流。 由于霍尔元件产生的霍尔电势很微弱,而且还存在较大的失调电压,因此对霍尔电压的放大和对不等位电势的补偿是该设计的两个主要需要解决的问题,而且霍尔元件中载流子浓度等随温度变化而变化,因此还需用温度补偿电路对其温度补偿。 1 系统设计框架 系统分为4个部分:1)霍尔元件的供电电路,由电压基准(电流基准)芯片为霍尔片提供工作电流; 2)霍尔元件及磁芯,将感应片感应的磁场(该磁场由通电电流产生)转化为霍尔电压;3)放大电路,将微弱的霍尔电压进行放大;4)反馈部分,利用了磁平衡原理:一次侧电流所产生的磁场,通过二次线圈电流进行补偿,使磁芯始终处于零磁通工作状态。其系统总流程图如图1所示。 2 系统硬件电路设计 系统由±5 V的稳压源供电。用一片电压基准芯片REF3012为砷化镓系列的霍尔元件HW300B提供基准电压。HW300B是一款可采用电压模式供电和电流模式供电的霍尔元件,HW300B放在开有气隙的集磁环的气隙里,并用胶水加以固定(霍尔元件和集磁环相对位置如果发生变化,会影响产生的霍尔电势的大小)。霍尔元件的输出接至仪器放大器AD620,作为放大器的差模出入端和共模输入端。放大器的增益可通过调节1、8引脚之间的10 kΩ的电位器改变。放大器的输出接反馈线圈,该反馈线圈绕在集磁环上,其绕线方向能使通过它的电流产生的磁场与集磁环收集到的磁场方向相反。反馈线圈末端放1个75 kΩ的精阻接地,可以通过测量精阻两端的电压,计算反馈线圈中的电流,进而推算穿过集磁环中心的被测电流的大小。其具体电路图如图2所示。 2.1 REF3012 以SOT23-3封装的REF3012是一个高精度、低功耗、低电压差电压参考系列芯片。REF3012小尺寸和低功耗(最大50μA)非常适用于便携式和电池供电。它不需要负载电容,但对任何容性负载很稳定。因磁敏型霍尔元件很容易受温度的影响,可以采用恒流源供电以减小其温度系数。在该系统设计中,REF3012的输入引脚1接+5 V电源,并接10μF的旁路电容至地,该旁路电容对电源进行滤波,提高电源稳定性。而其输出引脚2接到HW300B的引脚1,并且也接1O μF的旁路电容至地,GND(地)引脚3接地。由于系统设计要求REF3012为HW300B提供2.5 V的基准电压,根据REF3012的数据资料可知,当输入电压为5 V 时,输出电压为2.5 V,所以REF3012引脚1接+5 V电压。 2.2 霍尔元件 本设计采用砷化镓系列的HW300B型霍尔元件,输出霍尔电压范围122~204mV,输入、输出阻抗为240~550 Ω,补偿电压为-7~7 mV,温度系数为-1.8%/℃。其输入可采用电压模式供电,也可采用电流模式供电。这里采用电压模式供电,即就是HW300B的引脚1、3为控制输入端,而引脚2、4为霍尔电压输出端。 霍尔元件是将磁场转换为电信号的线性磁敏元件,霍尔输出电压 式中,S为乘积灵敏度,mV/(mT·mA);Ic为工作电流,mA;B为磁感应强度,mT。 本设计中,将霍尔元件放进开有气隙的集磁环的气隙里,并将霍尔元件和集磁环固定,这样可以感应出更大、更稳定的霍尔电势。式(1)中,当S与Ic一定,则Vh与B有直接线性关系。通电导体周围必然产生磁场,根据安培定律,电流与磁场的关系式∮BdI=μ0I0得:
用拉伸法测钢丝杨氏模量——实验报告
金属丝杨氏模量的测定实验报告 【实验目的】 1.学会用拉伸法测量杨氏模量; 2.掌握光杠杆法测量微小伸长量的原理; 3.学会用逐差法处理实验数据; 4.学会不确定度的计算方法,结果的正确表达; 【实验仪器】 YWC-1杨氏弹性模量测量仪(包括望远镜、测量架、光杠杆、标尺、砝码) 钢卷尺(0-200cm , )、游标卡尺(0-150mm,、螺旋测微器(0-150mm, 【实验原理】 在外力作用下,固体所发生的形状变化成为形变。它可分为弹性形变和塑性形变两种。本实验中,只研究金属丝弹性形变,为此,应当控制外力的大小,以保证外力去掉后,物体能恢复原状。 最简单的形变是金属丝受到外力后的伸长和缩短。金属丝长L ,截面积为S ,沿长度方向施力F 后,物体的伸长L ?,则在金属丝的弹性限度内,有: F S E L L =? 我们把E 称为杨氏弹性模量。 如上图: ??? ????=?≈=?ααα2D n tg x L n D x L ??=??2 (02n n n -=?) n x d FLD L n D x d F L L S F E ??=?=?=228241ππ 真实测量时放大倍数为4倍,即E=2E 【实验内容】 <一> 仪器调整 1、杨氏弹性模量测定仪底座调节水平; 2、平面镜镜面放置与测定仪平面垂直; 3、将望远镜放置在平面镜正前方左右位置上;
4、粗调望远镜:将镜面中心、标尺零点、望远镜调节等高,望远镜的缺口、准星对准平面镜中心,并能在望远镜外看到尺子的像; 5、调节物镜焦距能看到尺子清晰的像,调节目镜焦距能清晰的看到叉丝; 6、调节叉丝在标尺cm 2±以内,并使得视差不超过半格。 <二>测量 1、 记下无挂物时刻度尺的读数0n ; 2、依次挂上100g 的砝码,8次,计下7654321,,,,,,n n n n n n n ; 3、依次取下100g 的砝码,8次,计下n 0‘,' 7'65'4'3'2'1,,,,,,'n n n n n n n ; 4、用米尺测量出金属丝的长度L (两卡口之间的金属丝)、镜面到尺子的距离D ; 5、用游标卡尺测量出光杠杆x 、用螺旋测微器测量出金属丝直径d 。 <三>数据处理方法——逐差法 1. 实验测量时,多次测量的算术平均值最接近于真值。但是简单的求一下平均还 是不能达到最好的效果,我们多采用逐差法来处理这些数据。 2. 逐差法采用隔项逐差: 4 )()()()(37261504n n n n n n n n n -+-+-+-=? 3. 注:上式中的n ?为增重400g 的金属丝的伸长量。 【实验数据记录处理】 【结果及误差分析】 1. 光杠杆、望远镜和标尺所构成的光学系统一经调节好后,在实验过程中就不可 在移动,否则,所测的数据将不标准,实验又要重新开始; 2. 不准用手触摸目镜、物镜、平面反射镜等光学镜表面,更不准用手、布块或任 意纸片擦拭镜面;
霍尔传感器工作原理
半导体薄片置于磁感应强度为 B 的磁场中,磁场方向垂直于薄片,如图所示。当有电流 I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势 EH ,这种现象称为霍尔效应,该电动势称为霍尔电势,上述半导体薄片称为霍尔元件。 原理简述如下:激励电流 I 从 a 、 b 端流入,磁场 B 由正上方作用于薄片,这时电子 e 的运动方向与电流方向相反,将受到洛仑兹力 FL 的作用,向内侧偏移,该侧形成电子的堆积,从而在薄片的 c 、 d 方向产生电场 E 。电子积累得越多, FE 也越大,在半导体薄片 c 、 d 方向的端面之间建立的电动势 EH 就是霍尔电势。 由图可以看出,流入激励电流端的电流 I 越大、作用在薄片上的磁场强度B 越强,霍尔电势也就越高。磁场方向相反,霍尔电势的方向也随之改变,因此霍尔传感器能用于测量静态磁场或交变磁场。 半导体薄片置于磁感应强度为 B 的磁场中,磁场方向垂直于薄片,如图所示。当有电流 I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势 EH ,这种现象称为霍尔效应,该电动势称为霍尔电势,上述半导体薄片称为霍尔元件。 原理简述如下:激励电流 I 从 a 、 b 端流入,磁场 B 由正上方作用于薄片,这时电子 e 的运动方向与电流方向相反,将受到洛仑兹力 FL 的作用,向内侧偏移,该侧形成电子的堆积,从而在薄片的 c 、 d 方向产生电场 E 。电子积累得越多, FE 也越大,在半导体薄片 c 、 d 方向的端面之间建立的电动势 EH 就是霍尔电势。 由图可以看出,流入激励电流端的电流 I 越大、作用在薄片上的磁场强度B 越强,霍尔电势也就越高。磁场方向相反,霍尔电势的方向也随之改变,因此霍尔传感器能用于测量静态磁场或交变磁场。
霍尔传感器测速原理
现代检测技术论文 测控11-2班 范国霞 1105070202
绪论 现代技术关于速度的测量方法多种多样,其中包括线速度和角速度两个方面,速度和转速测量在工业农业、国防中有很多应用,如汽车、火车、轮船及飞机等行驶速度测量;发动机、柴油机、风力发电机等输出轴的转速测量等等。其中有微积分转换法,线速度与角速度转换方法,时间位移方法等等,下面我所介绍的是霍尔传感器对于速度的测量方法。霍尔式传感器是基于霍尔效应原理设计的传感器. 关键字:霍尔效应,霍尔传感器
霍尔传感器 霍尔传感器是基于霍尔效应的一种传感器。1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应,但由于金属材料的霍尔效应太弱而没有得到应用,随着半导体技术的发展,开始用半导体材料制成霍尔元件,由于他的霍尔效应显著而得到了应用和发展。在了解霍尔传感器之前先了解一下什么是霍尔元件以及它的基本特性。 霍尔元件的结构很简单,它是由霍尔片、四根引线和壳体组成的,如图1所示。 图1 霍尔片是一块矩形半导体单晶薄片,引出四根引线:1、1ˊ两根引线加激励电压或电流,称激励电极;2、2ˊ引线为霍尔输出引线,称霍尔电极。霍尔元件的壳体是用非到此金属、陶瓷或环氧树脂封装的。在电路中,霍尔元件一般可用两种符号表示,如图1(b)所示。
霍尔元件的基本特性 (1)额定激励电流和最大允许激励电流当霍尔元件自身温度升高10℃所流过的激励电流成为额定激励电流。以元件允许最大温升为限定的激励电流称为最大允许激励电流。因霍尔电势随激励电流增加而线性增加,所以使用中希望选用尽可能大的激励电流,因而需要知道元件的最大允许激励电流。 (2)输入电阻和输出电阻激励电极间的电阻称为输入电阻。霍尔电极输出电势对电路外部来说相当于一个电压源,其电源内阻即为输出电阻。 (3)不等位电势及不等为电阻当霍尔元件的激励电流为I时,若元件所处位置磁感应强度为零,则它的霍尔电势应该为零,但实际不为零。这是测得的空载电势称为不等位电势。 (4)寄生直流电势再外加磁场为零、霍尔元件用交流激励时,霍尔电极输出除了交流不等位电势外,还有一直流电势,称为寄生直流电势。 (5)霍尔电势温度系数在一定磁感应强度和激励电流下温度每变化1℃时,霍尔电势变化的百分率称为霍尔电势温度系数。他同时也是霍尔系数的温度系数。
霍尔传感器用法
一、霍尔电流电压传感器、变送器的基本原理与使用方法 1.霍尔器件 霍尔器件是一种采用半导体材料制成的磁电转换器件。如果在输入端通入控 制电流I C ,当有一磁场B穿过该器件感磁面,则在输出端出现霍尔电势V H 。 如图1-1所示。 霍尔电势V H 的大小与控制电流I C 和磁通密度B的乘积成正比,即:V H =K H I C Bsin Θ 霍尔电流传感器是按照安培定律原理做成,即在载流导体周围产生一正比于该电流的磁场,而霍尔器件则用来测量这一磁场。因此,使电流的非接触测量成为可能。 通过测量霍尔电势的大小间接测量载流导体电流的大小。因此,电流传感器经过了电-磁-电的绝缘隔离转换。 2.霍尔直流检测原理 如图1-2所示。由于磁路与霍尔器件的输出具有良好的线性关系,因此霍尔 器件输出的电压讯号U 0可以间接反映出被测电流I 1 的大小,即:I 1 ∝B 1 ∝U 我们把U 0定标为当被测电流I 1 为额定值时,U 等于50mV或100mV。这就制成 霍尔直接检测(无放大)电流传感器。
3.霍尔磁补偿原理 原边主回路有一被测电流I1,将产生磁通Φ1,被副边补偿线圈通过的电流I2所产生的磁通Φ2进行补偿后保持磁平衡状态,霍尔器件则始终处于检测零磁通的作用。所以称为霍尔磁补偿电流传感器。这种先进的原理模式优于直检原理模式,突出的优点是响应时间快和测量精度高,特别适用于弱小电流的检测。霍尔磁补偿原理如图1-3所示。 从图1-3知道:Φ 1=Φ 2 I 1N 1 =I 2 N 2 I 2=N I /N 2 ·I 1 当补偿电流I 2流过测量电阻R M 时,在R M 两端转换成电压。做为传感器测量电 压U 0即:U =I 2 R M 按照霍尔磁补偿原理制成了额定输入从0.01A~500A系列规格的电流传感器。 由于磁补偿式电流传感器必须在磁环上绕成千上万匝的补偿线圈,因而成本增加;其次,工作电流消耗也相应增加;但它却具有直检式不可比拟的较高精度和快速响应等优点。 4.磁补偿式电压传感器 为了测量mA级的小电流,根据Φ 1=I 1 N 1 ,增加N 1 的匝数,同样可以获得高磁 通Φ 1 。采用这种方法制成的小电流传感器不但可以测mA级电流,而且可以测电压。 与电流传感器所不同的是在测量电压时,电压传感器的原边多匝绕组通过串 联一个限流电阻R 1,然后并联连接在被测电压U 1 上,得到与被测电压U 1 成比 例的电流I 1 ,如图1-4所示。
霍尔传感器测量转速
测试技术应用案例 (霍尔传感器测量转速) 班级: 学号: 姓名:
霍尔传感器测量转速 一.霍尔传感器的优点 1.测量范围广:霍尔传感器可以测量任意波形的电流和电压, 如:直流、交流、脉冲波形等。 2.精度高:在工作温度区内精度优于1%,该精度适合于任何波形 的测量。 3.线性度好:优于%。 4.动态性能好:响应时间小于1μs跟踪速度di/dt高于50A/μs。 5.性价比高。 各式各样的霍尔传感器 二.霍尔传感器测转速原理 霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。当电流通过金属箔片时,若在垂直于电流的方向施加磁场,则金属箔片两侧面会出现横向电位差。利用霍尔效应可以设计制成多种传感器。霍尔电位差U H的基本关系为: U H=K H IB K H =1/nq(金属) 式中K H――霍尔系数;n――单位体积内载流子或自由电子的个数;q――电子电量;I――通过的电流;B――垂直于I的磁感应强度; 利用霍尔效应表达式:U H=K H IB,当被测物体上装上N只磁性体时,物体每转一周磁场就变化N次,霍尔电势相应变化N次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 三.测量设备 本案例以实验室霍尔元件测量圆盘转速为例。 实验设备:CSY2000系列传感器与检测技术实验台。
1、主控台部分,提供高稳定的±15V、+5V、±2V~±10V可 调、+2V~+24V可调四种直流稳压电源;主控台面板上还装有电压、频率、转速的3位半数显表。 2、旋转源0-2400转/分(可调) 需用器件与单元:霍尔传感器、5V直流源、转速调节装置、转动源单元、数显单元的转速显示部分。 四.实验方案 1.实验装置如下图 2.将5V直流源加于霍尔元件电源输入端。 3.将霍尔转速传感器输出端(黄)插入数显单元F i n端。 4.将转速调节中的2V-24V转速电源引入到台面上转动单元中转 动电源2-24VK插孔。 5.将数显单元上的转速/频率表波段开关拨到转速档,此时数显 表指示转速。 6.调节转速调节电压使转动速度变化。观察数显表转速显示的变 化。 五.实验结果计算 磁体经过霍尔元件,霍尔元件就会发出就会发出一个信号,经放大整形得到脉冲信号,两个脉冲的间隔时间即为周期,通过周期就可算出转速。
霍尔传感器的工作原理
两种霍尔传感器的工作原理 霍尔电流传感器是根据霍尔原理制成的.它有两种工作方式,即磁平衡式和直式.霍尔电流传感器一般由原边电路、聚磁环、霍尔器件、(次级线圈)和放大电路等组成. 1 直放式电流传感器(开环式) 众所周知,当电流通过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,它可以通过磁芯聚集感应到霍尔器件上并使其有一信号输出.这一信号经信号放大器放大后直接输出,一般的额定输出标定为4V. 2 磁平衡式电流传感器(闭环式) 磁平衡式电流传感器也称补偿式传感器,即主回路被测电流Ip在聚磁环处所产生的磁场通过一个次级线圈,电流所产生的磁场进行补偿,从而使霍尔器件处于检测零磁通的工作状态。 磁平衡式电流传感器的具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被聚磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动相应的功率管并使其导通,从而获得一个补偿电流Is.这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小.当与I H与匝数相乘与“原边电流与匝数相乘”所产生的磁场相等时, I H不再增加,这时的霍尔器件起指示零磁通的作用,此时可以通过I H来平衡.被测电流的任何变化都会破坏这一平衡.一旦磁场失去平衡,霍尔器件就有信号输出.经功率放大后,立即就有相应的电流I H流过次级绕组以对失衡的磁场进行补偿.从磁场失衡到再次平衡,所需的时间理论上不到1μs,这是一个动态平衡的过程。
工作原理主要是霍尔效应原理. 一、以零磁通闭环产品原理为例: 1、当原边导线经过电流传感器时,原边电流 IP 会产生磁力线,原边磁力线集中在磁芯气隙周围,内置在磁芯气隙中的霍尔电片可产生和原边磁力线成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式:IS* NS= IP*NP 其中,IS—副边电流;IP—原边电流;NP—原边线圈匝数;NS—副边线圈匝数; NP/NS—匝数比,一般取 NP=1。 电流传感器的输出信号是副边电流IS,它与输入信号(原边电流IP)成正比,IS 一般很小,只有 10~400mA。如果输出电流经过测量电阻 RM,则可以得到一个与原边电流成正比的大小为几伏的电压输出信号。 2、传感器供电电压 VA VA 指电流传感器的供电电压,它必须在传感器所规定的范围内。超过此范围,传感器不能正常工作或可靠性降低,另外,传感器的供电电压VA又分为正极供电电压VA+和负极供电电压VA-。要注意单相供电的传感器,其供电电压VAmin是双相供电电压VAmin的2倍,所以其测量范围要相供高于双电的传感器。 3、测量范围 Ipmax 测量范围指电流传感器可测量的最大电流值,测量范围一般高于标准额定值 IPN。二、电流传感器主要特性参数1、标准额定值 IPN 和额定输出电流 ISN IPN 指电流传感器所能测试的标准额定值,用有效值表示(A.r.m.s),IPN 的大小与传感器产品的型号有关。ISN指电流传感器额定输出电流,一般为10~400mA,当然根据某些型号具体可能会有所不同。 2、偏移电流 ISO 偏移电流也叫残余电流或剩余电流,它主要是由霍尔元件或电子电路中运算放大器工作状态不稳造成的。电流传感器在生产时,在25℃,IP=0时的情况下,偏移电流已调至最小,但传感器在离开生产线时,都会产生一定大小的偏移电流。产品技术文档中提到的精度已考虑了偏移电流增加的影响。 3、线性度 线性度决定了传感器输出信号(副边电流IS)与输入信号(原边电流IP)在测量范围内成正比的程度。 4、温度漂移 偏移电流ISO是在25℃时计算出来的,当霍尔电极周边环境温度变化时,ISO会产生变化。因此,考虑偏移电流ISO的最大变化是很重要的,其中,IOT是指电流传感器性能表中的温度漂移值。5、过载电流传感器的过载能力是指发生电流过载时,在测量范围之外,原边电流仍会增加,而且过载电 流的持续时间可能很短,而过载值有可能超过传感器的允许值,过载电流值传感器一般测量不出来,但不会对传感器造成损坏。
霍尔位置传感器的定标和杨氏模量的测定
霍尔位置传感器的定标和杨氏模量的测定 通过弯梁法测量固体材料的杨氏模量,可以学习和掌握基本长度和微小位移量测量的方法和手段,提高学生的实验技能,是大学物理实验中一个十分重要的项目。传统的弯梁法测量固体材料杨氏模量实验是采用光杠杆放大的方法测量微小位移量。随着科学技术的发展,微小位移量的测量技术愈来愈先进,在弯梁法测量固体材料杨氏模量的基础上,通过位移传感器的输出电压与位移量线性关系的定标和微小位移量的测量,有利于联系科研和生产实际,使学生了解和掌握微小位移的非电量电测新方法。 【实验目的】 1.本实验要求掌握用米尺、游标卡尺、螺旋测微计、读数显微镜测量长度的方法。 2.用弯曲法测出金属黄铜(或可锻铸铁)的杨氏模量。 【实验原理】 1.位移传感器 位移传感器是将霍尔元件置于磁感应强度为B 的磁场中,在垂直于磁场方向通以电流I ,则与这二者相垂直的方向上将产生霍尔电势差U H H U K I B = (1) 式中K 为元件的霍尔灵敏度。如果保持霍尔元件的电流I 不变,而使其在一个均匀梯度的磁场中移动时,则输出的霍尔电势差变化量为 H dB U KI Z dZ ?=? (2) 式中△U 为位移量,此式说明若dB dZ 为常数时,△U H 与△Z 成 正比。取比例系数为κ,则 H U Z κ?=? (3) 为实现均匀梯度的磁场,可以如图1 所示,两块相同的磁铁(磁铁截面积及表面磁感应强度相同) 相对放置,即N 极与N 极相对( S 极与S 极相对),两磁铁之间留一等间距间隙,霍尔元件平行于磁铁放在该间隙的中轴上。间隙大小要根据测量范围的测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。磁铁截面要远大于霍尔元件,以尽可能的减小边缘效应影响,提高测量精确度。 若磁铁间隙内中心截面处的磁感应强度为零,霍尔元件处于该处时,输出的霍尔电势差 图1
浅谈霍尔电流传感器ACS785ACS712系列电流检测方式
浅谈霍尔电流传感器ACS785/ACS712系列电流检测方式 浅谈电流检测方式 一、检测电阻+运放 优势:成本低、精度较高、体积小 劣势:温漂较大,精密电阻的选择较难,无隔离效果。 分析: 这两种拓扑结构,都存在一定的风险性,低端检测电路易对地线造成干扰;高端检测,电阻与运放的选择要求高。检测电阻,成本低廉的一般精度较低,温漂大,而如果要选用精度高的,温漂小的,则需要用到合金电阻,成本将大大提高。运放成本低的,钳位电压低,而特殊工艺的,则成本上升很多。 二、电流互感器CT/电压互感器PT 在变压器理论中,一、二次电压比等于匝数比,电流比为匝数比的倒数。而CT 和PT 就是特殊的变压器。基本构造上,CT 的一次侧匝数少,二次侧匝数多,如果二次开路,则二次侧电压很高,会击穿绕阻和回路的绝缘,伤及设备和人身。PT 相反,一次侧匝数多,二次侧匝数少,如果二次短路,则二次侧电流很大,使回路发热,烧毁绕阻及负载回路电气。 CT,电流互感器,英文拼写Current Transformer,是将一次侧的大电流,按比例变为适合通过仪表或继电器使用的,额定电流为5A 或1A 的变换设备。它的工作原理和变压器相似。也称作TA 或LH(旧符号). 工作特点和要求: 1、一次绕组与高压回路串联,只取决于所在高压回路电流,而与二次负荷大小无关。 2、二次回路不允许开路,否则会产生危险的高电压,危及人身及设备安全。 3、CT 二次回路必须有一点直接接地,防止一、二次绕组绝缘击穿后产生对地高电压,但仅一点接地。 4、变换的准确性。 PT,电压互感器,英文拼写Phase voltage Transformers,是将一次侧的高电压按比例变为适合仪表或继电器使用的额定电压为100V 的变换设备。电磁式电压互感器的工作原理和变压器相同。也称作TV 或YH(旧符号)。 工作特点和要求: 1、一次绕组与高压电路并联。 2、二次绕组不允许短路(短路电流烧毁PT),装有熔断器。 3、二次绕组有一点直接接地。 4、变换的准确性
实验报告-共振法测量固体材料的杨氏模量
实验报告 学生姓名:杨绍东 学号:100204122 班级:A10轮机1 实验名称:共振法测杨氏模量 实验指导老师:卢立娟 实验时间:2011.12.12 共振法测量固体材料的杨氏模量 、实验目的 1学会用动态悬挂法测量材料的杨氏模量. 2学会用外延法测量,处理实验数据. 3了解换能器的功能,熟悉测试仪器的使用. 4培养学生综合运用知识和使用常用实验仪器的能力. 二、实验原理 如图所示,一长为L 的细棒(长度比横向尺寸大很多) 棒的轴线沿x 方向.棒在z 方向的振动(棒的横振动)满足 动力学方程 YI S x 4 S 为棒的横截面积, S 为某一截面的惯量矩。 由该方程及边界条件,可解出杨氏模量: 上式中m 为棒的质量,f 为圆棒的基频频率. 3 Y 1.6067 f 2 d 4 实验中就是以悬挂点位置为横坐标,以相对应的共振频率为纵坐标作出关系曲线,用外延测量 法求得曲线最低点(即节点)所对应的频率即为试棒的基频共振频率 h.再由上式可求得杨氏模量 Y 。 三、实验仪器 YM-2动态型杨氏模量测试台, FB209型动态杨氏模量测试仪,通用示波器、试样棒(铜、不锈 钢)、天平、螺旋测微计等. 式中 为棒上距左端X 处横截面的Z 方向位移,Y 为该棒的杨氏模量, 单位为N/m 2, 为材料密度, 1.9978 10 L 4S I 7.8870 10 2 L 3m 对于直径为d 的圆棒,惯量矩| z 2dS S 64 ,代入上式得:
四、实验内容 1测量试样棒的长度L,直径d,质量m,为提高测量精度,要求以上量均测量3-5次. 2测量试样棒在室温时的共振频率f i. (1) 安装试样棒:将试样棒悬挂于两悬线之上,要求试样棒横向水平,悬线与试样棒轴向垂直,两悬线挂点到试样棒的端点距离相同,并处于静止状态. (2) 连机:将测试台、测试仪器、示波器之间用专用导线连接. (3) 开机:分别打开示波器、测试仪的电源开关,调整示波器处于正常工作状态. 适当选取输出衰减大小,调节频率旋钮显示当前输出频率. (4) 鉴频:待试样棒稳定后,调节“频率调节”粗、细旋钮,寻找试样棒的共振频率f i. (5) 外延法测共振频率f i:因f i值随悬线位置不同而略有变化。按照上述方法,依次将两悬线支 架同时从距两端20mm处开始,每次向内移动5mm,直至50mm处(35mm处不测),分别测出相应的共振频率f i.(自行设计数据记录表格) (6) 以悬挂点位置x为横坐标,以相对应的共振频率为纵坐标作出关系曲线,求曲线最低点(即 节点)所对应的频率(即是试棒的基频共振频率f i). 五、数据分析 i测量试样棒的长度L A 类不确定度为 A =4.30 “(i5.96-i5.96)2 (i5.96-i5.97)2 (i5.96-i5.96)2。皿呦 V 3 2 B类不确定度为□ = 0. 005(cm) 长度L的不确定度为L = . 一2A—? 0.02(cm) L =i5.96 0.02(cm) E L = i00% 0.i3% i5.96 2测量试样棒的直径d A =2.780X (5.987-5.990)2 (5.987-6.00C)2 (5.987-5.98i)2 (5.987-5.968>2 (5.987-5.996)2 0.0i6(mm)
霍尔齿轮转速传感器的工作原理和优点
霍尔齿轮转速传感器的工作原理和优点 作者: 发布时间:2009-11-25 来源: 关键字:霍尔转速传感器 霍尔转速传感器的主要工作原理是霍尔效应,也就是当转动的金属部件通过霍尔传感器的磁场时会引起电势的变化,通过对电势的测量就可以得到被测量对象的转速值。霍尔转速传感器的主要组成部分是传感头和齿圈,而传感头又是由霍尔元件、永磁体和电子电路组成的。 霍尔转速传感器的工作原理 霍尔转速传感器在测量机械设备的转速时,被测量机械的金属齿轮、齿条等运动部件会经过传感器的前端,引起磁场的相应变化,当运动部件穿过霍尔元件产生磁力线较为分散的区域时,磁场相对较弱,而穿过产生磁力线较为几种的区域时,磁场就相对较强。 霍尔转速传感器就是通过磁力线密度的变化,在磁力线穿过传感器上的感应元件时,产生霍尔电势。霍尔转速传感器的霍尔元件在产生霍尔电势后,会将其转换为交变电信号,最后传感器的内置电路会将信号调整和放大,输出矩形脉冲信号。 霍尔转速传感器的测量方法 霍尔转速传感器的测量必须配合磁场的变化,因此在霍尔转速传感器测量非铁磁材质的设备时,需要事先在旋转物体上安装专门的磁铁物质,用以改变传感器周围的磁场,这样霍尔转速传感器才能准确的捕捉到物质的运动状态。 霍尔转速传感器主要应用于齿轮、齿条、凸轮和特质凹凸面等设备的运动转速测量。高转速磁敏电阻转速传感器除了可以测量转速以外,还可以测量物体的位移、周期、频率、扭矩、机械传动状态和测量运行状态等。 霍尔转速传感器目前在工业生产中的应用很是广泛,例如电力、汽车、航空、纺织和石化等领域,都采用霍尔转速传感器来测量和监控机械设备的转速状态,并以此来实施自动化管理与控制。 霍尔转速传感器的应用优势 霍尔转速传感器的应用优势主要有三个,一是霍尔转速传感器的输出信号不会受到转速值的影响,二是霍尔转速传感器的频率相应高,三是霍尔转速传感器对电磁波的抗干扰能力强,因此霍尔转速传感器多应用在控制系统的转速检测中。 同时,霍尔转速传感器的稳定性好,抗外界干扰能力强,如抗错误的干扰信号等,因此不易因环境的因素而产生误差。霍尔转速传感器的测量频率范围宽,
霍尔位置传感器原理和应用
霍尔位置传感器原理和应用 一.霍尔位置传感器的特点: 霍尔位置传感器是一种检测物体位置的磁场传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔位置传感器以霍尔效应原理为其工作基础。 霍尔位置传感器具有许多优点,它们的结构牢固,体积小,重量轻,寿命长,安装方便,功耗小,频率高(可达1MHZ),耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀。 霍尔位置传感器开关型输出的具有无触点、无磨损、输出波形清晰、无抖动、无回跳、位置重复精度高(可达μm级)。采取了各种补偿和保护措施的霍尔位置传感器的工作温度范围可达到-55℃~150℃。 按照霍尔位置传感器的功能可将它们分为:霍尔线性型传感器和霍尔开关型传感器。前者输出模拟量,后者输出数字量。 霍尔位置传感器通过它对磁场变化的测量,将许多非电、非磁的物理量例如力、力矩、压力、应力、位置、位移、速度、加速度、角度、角速度、转数、转速以及工作状态发生变化的时间等,转变成电量来进行检测和控制,因而有着广泛的用途。 二.霍尔位置传感器的原理: 2.1霍尔效应和霍尔元件
在一块通电的半导体薄片上,加上和片子表面垂直的磁场B,在薄片的横向两侧会出现一个电压,如图1中的VH,这种现象就是霍尔效应,是由科学家爱德文·霍尔在1879年发现的。VH称为霍尔电压。 这种现象的产生,是因为通电半导体片中的载流子在磁场产生的洛仑兹力的作用下,分别向片子横向两侧偏转和积聚,因而形成一个电场,称作霍尔电场。霍尔电场产生的电场力和洛仑兹力相反,它阻碍载流子继续堆积,直到霍尔电场力和洛仑兹力相等。这时,片子两侧建立起一个稳定的电压,这就是霍尔电压,这个半导体薄片称为霍尔元件。霍尔元件可用多种半导体材料制作,如Ge、Si、InSb、GaAs、InAs、InAsP等等。 2.2 霍尔集成电路 霍尔集成电路是将一个霍尔元件和电压放大电路、信号处理电路集成在同一个硅芯片上,生产出单片霍尔集成电路,它又分为霍尔线性电路和霍尔开关电路。
霍尔传感器转速测量电路设计
课程设计报告书
2.概述 2.1系统组成框图 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化为脉冲信号。信号预处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS兼容信号。处理器采用AT89C51单片机,显示器采用8位LED数码管动态显示。本课题采用的是以8051系列的A T89C51单片机为核心开发的霍尔传感器测转速的系统。系统硬件原理框图如图1所示: 图1 系统框图 2.2系统工作原理 转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。其单位为 r/min。由霍尔元件及外围器件组成的测速电路将电动机转速转换成脉冲信号,送至单片机AT89C51的计数器 T0进行计数,用T1定时测出电动机的实际转速。此系统使用单片机进行测速,采用脉冲计数法,使用霍尔传感器获得脉冲信号。其机械结构也可以做得较为简单,只要在转轴的圆盘上粘上两粒磁钢,让霍尔传感器靠近磁钢,机轴每转一周,产生两个脉冲,机轴旋转时,就会产生连续的脉冲信号输出。由霍尔器件电路部分输出,成为转速计数器的计数脉冲。控制计数时间,即可实现计数器的计数值对应机轴的转速值。单片机CPU将该数据处理后,通过LED显示出来。
2.2.1霍尔传感器 霍尔传感器是对磁敏感的传感元件,由磁钢、霍耳元件等组成。测量系统的转速传感器选用SiKO 的 NJK-8002D 的霍尔传感器,其响应频率为100KHz ,额定电压为5-30(V )、检测距离为10(mm )。其在大电流磁场或磁钢磁场的作用下,能测量高频、工频、直流等各种波形电流。该传感器具有测量精度高、电压范围宽、功耗小、输出功率大等优点,广泛应用在高速计数、测频率、测转速等领域。输出电压4~25V ,直流电源要有足够的滤波电容,测量极性为N 极。安装时将一非磁性圆盘固定在电动机的转轴上,将磁钢粘贴在圆盘边缘,磁钢采用永久磁铁,其磁力较强,霍尔元件固定在距圆盘1-10mm 处。当磁钢与霍尔元件相对位置发生变化时,通过霍尔元件感磁面的磁场强度就会发生变化。圆盘转动,磁钢靠近霍尔元件,穿过霍尔元件的磁场较强,霍尔元件输出低电平;当磁场减弱时,输出高电平,从而使得在圆盘转动过程中,霍尔元件输出连续脉冲信号。这种传感器不怕灰尘、油污,在工业现场应用广泛。 2.2.2转速测量原理 霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b 、d 。若在垂直于薄片平面(沿厚度 d )方向施加外磁场B ,在沿l 方向的两个端面加一外电场,则有一定的电流流过。由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:qVB f = 式中:f —洛仑磁力, q —载流子电荷, V —载流子运动速度, B —磁感应强度。 这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。 霍尔电压大小为: H U H R =d B I /??(mV) 式中:H R —霍尔常数, d —元件厚度,B —磁感应强度, I —控制电流 设 H K H R =d /, 则H U =H K d B I /??(mV) H K 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和 单位控制电流下输出霍尔电动势的大小。应注意,当电磁感应强度B 反向时,霍尔电动势也反向。图2为霍耳元件的原理结构图。
霍尔传感器的原理及应用
第八章霍尔传感器 课题:霍尔传感器的原理及应用课时安排:2 课次编号:12 教材分析 难点:开关型霍尔集成电路的特性 重点:霍尔传感器的应用 教学目的和要求1、了解霍尔传感器的工作原理; 2、了解霍尔集成电路的分类; 3、掌握线性型和开关型霍尔集成电路的特性; 4、掌握霍尔传感器的应用。 采用教学方法和实施步骤:讲授、课堂互动、分析教具:各种霍尔元 件、霍尔传感器 各教学环节和内容 演示1: 将小型蜂鸣器的负极接到霍尔接近开关的OC门输出 端,正极接V cc端。在没有磁铁靠近时,OC门截止,蜂鸣 器不响。 当磁铁靠近到一定距离(例如3mm)时,OC门导通, 蜂鸣器响。将磁铁逐渐远离霍尔接近开关到一定距离(例 如5mm)时,OC门再次截止,蜂鸣器停响。 演示2: 将一根导线穿过10A霍尔电流传感器的铁芯,通入0.1~1A电流,观察霍尔IC的输出电压的变化,基本与输入电流成正比。 从以上演示,引入第一节霍尔效应、霍尔元件的工作原理。 第一节霍尔元件的工作原理及特性 一、工作原理 金属或半导体薄片置于磁感应强度为B的磁场中,磁场方向垂直于薄片,当有电流I流过薄片时,在垂直于电流和磁场的方向上将产生电动势E H,这种现象称为霍尔效应(Hall Effect),该电动势称为霍尔电动势(Hall EMF),上述半导体薄片称为霍尔元件(Hall Element)。用霍尔元件做成的传感器称为霍尔传感器(Hall Transducer)。
图8-1霍尔元件示意图 a)霍尔效应原理图b)薄膜型霍尔元件结构示意图c)图形符号d)外形霍尔属于四端元件: 其中一对(即a、b端)称为激励电流端,另外一对(即c、d端)称为霍尔电动势输出端,c、d端一般应处于侧面的中点。 由实验可知,流入激励电流端的电流I越大、作用在薄片上的磁场强度B越强,霍尔电动势也就越高。霍尔电动势E H可用下式表示 E H=K H IB(8-1)式中K H——霍尔元件的灵敏度。 若磁感应强度B不垂直于霍尔元件,而是与其法线成某一角度θ时,实际上作用于霍尔元件上的有效磁感应强度是其法线方向(与薄片垂直的方向)的分量,即B cosθ,这时的霍尔电动势为 E H=K H IB cosθ(8-2) 从式(8-2)可知,霍尔电动势与输入电流I、磁感应强度B成正比,且当B的方向改变时,霍尔电动势的方向也随之改变。如果所施加的磁场为交变磁场,则霍尔电动势为同频率的交变电动势。 目前常用的霍尔元件材料是N型硅,霍尔元件的壳体可用塑料、环氧树脂等制造。 二、主要特性参数 (1)输入电阻R i恒流源作为激励源的原因:霍尔元件两激励电流端的直流电阻称为输入电阻。它的数值从几十欧到几百欧,视不同型号的元件而定。温度升高,输入电阻变小,从而使输入电流I ab变大,最终引起霍尔电动势变大。使用恒流源可以稳定霍尔原件的激励电流。 (2)最大激励电流I m激励电流增大,霍尔元件的功耗增大,元件的温度升高,从而引起霍尔电动势的温漂增大,因此每种型号的元件均规定了相应的最大激励电流,它的数值从几毫安至十几毫安。 提问:霍尔原件的最大激励电流I m为宜。 A.0mA B.±0.1 mA C.±10mA D.100mA (4)最大磁感应强度B m磁感应强度超过B m时,霍尔电动势的非线性误差将明显增大,B m的数值一般小于零点几特斯拉。 提问:为保证测量精度,图8-3中的线性霍尔IC的磁感应强度不宜超过为宜。 A.0T B.±0.10T C.±0.15T D.±100Gs