CATIA人机模块课件
CATIA教程基础操作 ppt课件
2021/3/26
CATIA教程基础操作 ppt课件
4
第一节 基本介绍
一、概况
CATIA是法国达索公司(Dassault Systems)的产品。达索公司自1981年成立, 现已成为当今全球最大的CAD/CAM/CAE/PLM软件开发商。
CATIA用户遍及全球的汽车、航空航天、造船、机械制造、家用电器等各个 领域,是全球使用最广泛的3D应用软件之一。
2021/3/26
CATIA教程基础操作 ppt课件
直线平移
23
第一章 CATIA V5的三维世界
2. 面平移
选择罗盘上的任意平面,按下鼠标左键拖动鼠标,则工作空间中的元素沿该 平面移动。
2021/3/26
CATIA教程基础操作 ppt课件
24
第一章 CATIA V5的三维世界
3. 绕坐标轴转动
高级加工 Advanced Part Machining
多轴曲面加工 Multi-Axis Surface Machining
CATIA教程基础操作 ppt课件
快速成型加工
STL
Rapid Prototyping
14
第一章 CATIA V5的三维世界
五、知识工程模组
知识工程模组(Knowlegeware) 是一个智能化的解决方案,它可以把隐 含知识的设计方法转变成显性知识的设计方法,用户可以捕捉和重用共同的、贯 穿于整个产品生命周期的经验知识。从设计到制造,从单个应用到全企业的广泛 应用,用户可以分享任何类型的外部知识。
2021/3/26
板金设计
Sheet
metal Production
CATIA教程基础操作 ppt课件
功能建模零件设计
(2024年)CATIA基础教程基本操作PPT课件

03
支持多体动力学仿真、控制系统 仿真等多种仿真技术。
04
2024/3/26
高效的分析能力
集成有限元分析、流体动力学分 析等多种分析功能。
开放性和可扩展性
支持多种数据格式交换,提供二 次开发接口和插件机制。
6
02
CATIA基本操作界面与功能
Chapter
2024/3/26
7
启动与退出CATIA
2024/3/26
”。
2024/3/26
03
基本实体创建工具
使用工具栏中的基本实体创建工具,如“长方体”、“圆柱体”、“圆
锥体”等,通过指定尺寸和位置参数来创建基本的三维实体。
17
三维实体编辑与修改
实体选择
通过鼠标点击或选择工具来选择需要 编辑的三维实体。
编辑实体参数
在选中实体的情况下,可以编辑实体 的尺寸、位置等参数来改变实体的形 状和大小。
可行性。
间隙分析
通过分析零部件之间的间隙,可以评 估装配的紧密程度,以及是否需要调 整设计。
生成装配报告
在完成装配设计和分析后,可以生成 详细的装配报告,以供评审和交流。
23
06
工程图设计基础操作
Chapter
2024/3/26
24
创建工程图文件及设置视图
打开CATIA软件,选择“开始”菜单中 的“机械设计”模块,进入工程图设计 界面。
CATIA是法国达索公司开发的一款高端CAD/CAE/CAM 一体化软件。
CATIA在航空、汽车、机械制造等领域有着广泛的应用 。
CATIA具有强大的建模、分析和仿真功能,支持多平台 操作。
2024/3/26
4
CATIA软件应用领域
CATIA人机模块PPT课件
先点击模型, 之后选择命令。
二、 人机模块操作-其他命令
频次判定,小于4次/分为间歇性, 大于为连续性。
模型各部位作业强 度。
本命令可以配合 命令(posture editor) 使用。
负荷对模型作业等级 存在影响。
模型包含68个铰链点个6个耦合点
二、 人机模块操作-常用命令
点击之后再点 击人体模型需 要移动的部位, 出现图中对话 框后,对罗盘 进行拖动。
拖动罗 盘
本命令需要与IK Behaviors配合使用
二、 人机模块操作-常用命令
点击之后再点 击需要抓取物 体的表面,之 后再点击模型 手内面,手就 会快速移动。
选择对模型各部位作业等级存在 影响。
综合判定结果
三、 课程回顾与练习
1.课程回顾
a.人机模块介绍
b.模型设置命令
c.模型运动命令 e.作业强度分析命令
d.快速移动命令
2.练习
找一个困难作业的操作,运用人机模块进行仿真练习。
后记
以上为CATIA人机模拟的基本操作,由于本人水平有限,部分命令未进 行讲解,后续与大家相互学习,相互提高,谢谢!
二、 人机模块操作-常用命令
2.模型运动命令
本命令条中的命令都为常用命令。
二、 人机模块操作-常用命令
点击之后 需点击结 构树或数 模人体模 型,出现 图中对话 框
调节自由度
二、 人机模块操作-常用命令
点击之后 需点击结 构树或数 模人体模 型,出现 图中对话 框
右键 肢体运动的自由度选项
本命令与上一命令(posture editor)基本相同,操 作简化。
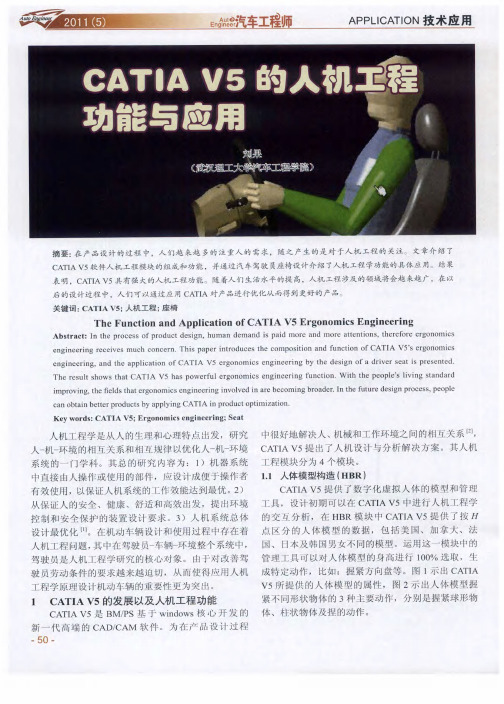
CATIA V5的人机工程功能与应用
2 0 : 5— 6 0 2 1 1.
由于 驾驶 人 员 的 身材 有 差 异 ,可 以再 选 取 9 5百
【】张 立 斌 . 机 工程 学 及其 在汽 车设 计 中 的应 用 []汽 车 运 用, 5 人 J.
20 9 ( ): 00百分 位 的人 体 模 型 ,确 定 出驾 驶 员座 椅 设
( 稿 日期 : 001 —8 收 2 1 .20 )
( 上接 第3页) 8
电动汽 车动 力传 动系 统参数 设 计及合 理 匹配对 其 性能有 很大 的影 响 。根 据 整车动 力 性要求 ,通 过理论
计 算 ,对 电动汽 车 电机 、电池和 传动 系统 进行 匹配计
誓 ¨ 凸 星 j
需将 人体 模型 直接 放入 到所 考 虑 的设备 之 中,减 少 了
制 作 人体 模 型 的过程 ,而 且在 C T A V5中可 以对 人 A I
图 2 人体 模 型 的 修 改
体数据 进 行调 整 ,如 图 1 图 2所 示 ,使得人 体 模型 和
1 人体 测量编辑 ( . 2 HME) 此 模块 可 以通 过人 体测 量 学工 具生 成较 为 高级 的
真 结果 表 明, 电动 汽车 的最 大车 速 、加 速 性和爬 坡性
等 动 力性能 能够满 足 设计 的要求 ,说 明整车 匹配 方案
【 4 】朱正礼,殷承 良,张建武 .基于遗传算法的纯电动汽车动力总成参 数优化 [] J.上海交通大学学报,2 0 ,3 1):10 -9 2 0 4 8(1 9 717 .
参 数满 足 实际要 求 。 由于 驾驶者 身 材各 异 ,所 以在设 计 时必须 对 人机
用 户 自定义人 体模 型 ,从 而使 人体 模 型与 驾驶 员 的模 工程 进行 仔 细研 究 ,确 定其尺 寸 J 于操 作姿 势来 。对 型 吻合 ,得到 更 为精确 的数 据 。在 此模 块 中系 统预 设 说 ,行驶 过程 中驾 驶 员 的脚 始 终放 在踏 板上 , 由于不 了立姿 、 平举 、延伸 平 举 、侧平 举 、坐姿 和跪 姿 6种 同工况 踏板 的角 度 也是有 变化 的,通过试 验 ,由座 椅 、 前 姿势 。可 以根据 实 际要 求先 预 设 1种姿 势 ( 驾驶 员 踏 板和 转 向盘 的位 置 以及驾 驶姿 势参 数 的变化 得 到驾 如 的坐 姿 )然 后在 该姿 势 的基础 上进 行修 改 。
CATIA---人机工程模块实用教程

视野功能1/2
2
单击需要提供视野的人体模型,出现视野窗口
1
单击命令
3
右键视野窗口,出现对话框,可以对视野属性进行修改
视野功能2/24视属性概况上肢伸展域2
单击人体模型的 手掌或者手指
1
单击命令
只能单击手 掌或者手指
人体模型测量编辑1/2
1
2
单击命令
进入人体编辑模块
3
选择需要编辑的人体模型
4
1
2
单击需要首选角度的 人体模型部位
4
关闭编辑对话框
5
单击命令退出此部位 编辑,并依次设置其 他部位首选角度
人体模型姿态评估与优化-评 估
1
3
显示各部分分值
单击命令
2
单击需要评估的人体 模型
4
单击chat以列表形式显示
人体模型姿态评估与优化-优化
1
单击命令
2
优化人体模型
优化后人体模型
优化前人体模型
人体模型姿态3-标准姿态
3
2
选择需要调整姿 态的人体模型 对其标准姿态参数 进行调整
4
回复标准姿态:右键人体模型树 ,如下选择
1
单击命令
2
人体模型编辑-自由移动
1
单击需要移动的部位, 罗盘随之移动到此处
3
移动罗盘想要的位置
单击命令
人体模型编辑-姿势交换
交换之前
交换后
右键人体模型,单击SWAP命令
人机工程
建立人体模型
1 2 3
输入参数
4
OK
人体模型属性
1 2
单击命令
选择需要调整属 性的人体模型
3
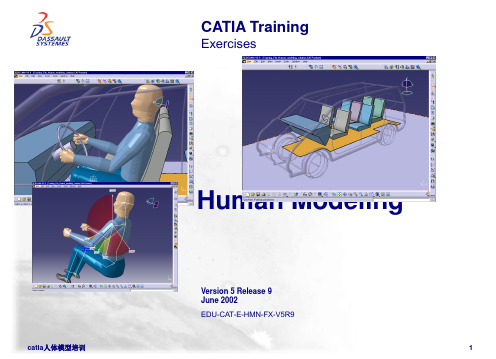
catia人体模型培训课件
Environment window
Software Version
Workbench Menu Bar
Function of the workbench
PP R Tre e
Click on the Line to adjus t PPR Tree
Expand a Compon ent Button
Ergonomics review inside and around a vehicle (Step 1): Human Builder Ergonomics review inside and around a vehicle (Step 2): Human Measurement Editor Ergonomics review inside and around a vehicle (Step 3): Human Postural Analysis Ergonomics review inside and around a vehicle (Step 4): Human Activity Analysis
catia人体模型培训
5
List of Icons and Functions
These are the icons and functions for Human Postural Analysis
catia人体模型培训
6
List of Icons and Functions
These are the icons and functions for Human Activity Analcises
catia人体模型培训
Human Modeling
Version 5 Release 9 June 2002 EDU-CAT-E-HMN-FX-V5R9
CATIA人机模块课件综述

视野
平衡 重心 参考判断作业姿势强度, 红线表示人体不平衡
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框 本命令中其他操作需与其他 命令配合进行,演练说明。
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
先点击模 型,之后 选择命令, 出现图片 状态,点 击左键, 模型就会 快速移动。
二、 人机模块操作-其他命令
3.快速移动命令
课题:罗盘怎么 放回去?
操作步骤:右键点击罗盘— 选择图片命令—点击模型— 拖拽罗盘,模型相应跟着移 动。
二、 人机模块操作-其他命令
罗盘放回:
操作步骤:右键点击罗盘—选择图片命 令—拖拽罗盘至右下角绝对坐标—松开 罗盘即可。
选择Chinese(taiwan),若版本没有此选 项,选择korean。
根据需要选择模型人体的全身或局部。
模型人体出现或移动时的零点坐标,建议选 择Between Feet。
二、 人机模块操作-常用命令
透视图,调整 模型显示精度 点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
后记
以上为CATIA人机模拟的基本操作,由于本人水平有 限,部分命令未进行讲解,后续与大家相互学习,相互提 高,谢谢!
感谢聆听!
二、 人机模块操作-常用命令
1.模型设置命令
常用操作命令4个,和2个辅助命令
常用操作命令4个
ห้องสมุดไป่ตู้
辅助命令2个
其他命令在CATIA内使用频次不多, DELMIA软件使用,此处体现。
二、 人机模块操作-常用命令
注意 先点 结构 树
CATIA人机分析模块

CATIA人机工程模块• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析人体模型建立完成后,修改设置人体模型的显示属性• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析四肢及头部摆(转)动角度界限 动画视角接 合:可接合人体模型的6对部位(肩部、大臂、前臂、大腿、小腿、踝部)改变其活动范围;角度界限:显示隐藏角度界限;动画视角:在某一自由度上放大显示所选择的部位,提供最佳视角。
应用放置功能以参考点为基准移动,点选无先后顺序标准姿态:主要用于蹲坐、弯腰、扭曲、倾斜以及肘部的调整等姿态• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析人体模型属性编辑改变身体某个部位的姿势(摸索)可以在人体的7个部位上建立移动坐标坐标系方向与CATIA 坐标系一致坐标系方向根据人体关节确定肢体的精确定位(出击)坐标系方向可变坐标系方向不变人体模型姿势、复制重置与交换右键人体模型视野功能• 1、建立人体模型• 2、人体模型姿态• 3、人体模型编辑• 4、人体模型的高级设置• 5、人体测量编辑• 6、人体模型姿态分析• 7、人体运动分析碰撞检查绑定与解除绑定:对于product应在结构树中选取,否侧应多次绑定解除一解除二回位定义偏移量偏移命令用于重新定义定位模式的动作,定位模式的默认动作中心点是身体部位的“末端”点,在某些定位中可通过重新定义中心点,简化操作过程。
上肢伸展域人体上肢的伸展域往往决定工作空间的世界一级工作空间内设备等物体的位置和设备的结构的设计。
注意:只能选择手或手指人体模型的约束应用人体模型的约束功能,可以使人体模型在IK模式中,精确地达到用户要求的姿态。
CATIA_V5人机培训应用
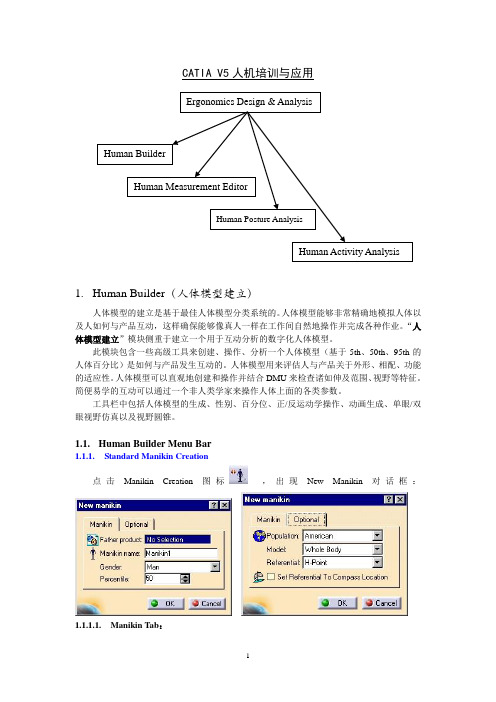
CATIA V5人机培训与应用1.Human Builder(人体模型建立)人体模型的建立是基于最佳人体模型分类系统的。
人体模型能够非常精确地模拟人体以及人如何与产品互动,这样确保能够像真人一样在工作间自然地操作并完成各种作业。
“人体模型建立”模块侧重于建立一个用于互动分析的数字化人体模型。
此模块包含一些高级工具来创建、操作、分析一个人体模型(基于5th、50th、95th的人体百分比)是如何与产品发生互动的。
人体模型用来评估人与产品关于外形、相配、功能的适应性。
人体模型可以直观地创建和操作并结合DMU来检查诸如伸及范围、视野等特征。
简便易学的互动可以通过一个非人类学家来操作人体上面的各类参数。
工具栏中包括人体模型的生成、性别、百分位、正/反运动学操作、动画生成、单眼/双眼视野仿真以及视野圆锥。
1.1.Human Builder Menu Bar1.1.1.Standard Manikin Creation点击Manikin Creation图标,出现New Manikin对话框:1.1.1.1.Manikin Tab:Father Product:人体模型必须附加在左边树形图的一个Product内,这个Product可以是任何级别的,但不可以是其他任何人体模型。
Manikin name: 在这里为新建的人体模型命名,如:驾驶员、乘客、机械工等。
多个人体模型可以有同一个名字,如果将这栏空白,系统默认命名为Manikin1 (2, 3, etc.),并且保存为Manikin1.CATProduct。
Gender: 在这里选择人体模型的性别。
Percentile: 可以选择从1%至99%的人体百分位。
1.1.1.2.Optional TabPopulation:这里选择人体模型的国籍,系统默认有:美国、加拿大、法国、日本、韩国。
Model: 这里选择希望得到的人体模型的类别,系统提供三种:全身、只有左臂、只有右臂。
CATIA课件

4 对不同约束形式颜色的定义和对尺寸标注格式的设置:
Tools
Options
Parameters
Symbols
使设计者可以根据这些约束颜色信息判断所设计零件的出错原 因,以便修改。
5、单位设置: Tools Options Parameters Units
6、 零件设计显示设置: Tools Options Part Design Display
移动鼠标, 物体会随之旋转。
5、物体的缩放: 在屏幕上的任何地方按鼠标中键不放,并单击左(右)键, 上、下移动鼠标,可以对物体做缩放的操作。
第三节 基本使用环境
一、操作技巧 (二)指南针 1、自由旋转: 抓住指南针Z轴顶端的圆点并移动,指南针会以红色方块为 顶点自由旋转,屏幕上的空间及物体也会随之旋转。 2、平移: 抓住指南针上的任何一直线,屏幕上的空间及物体会沿着直
8、 草图绘制图标(Sketcher) 在零件设计模式中单击绘制草图的工作面后点击草图绘制图标 将进入草图绘制模式,完成草图绘制后点击退出图标 将返回零件设计模式。 9、绘图辅助要素工具条(Reference Elements) 为方便零件设计,有时需要点击绘图辅助要素工具条上的命令 图标,建立必要的辅助点、线和面,命令图标的功能如图。
Operation工具条中各命令图标及功能
五、文件管理
CATIA文件管理与Windows应用程序相同,其功能如图,File下拉 菜单及Standard工具条。
Start File Edit View Tool
常用菜单
返回
机01401班王芳层
ห้องสมุดไป่ตู้
机01401班 刘磊 郑丽娜
自02404 陈志宇
三维立体
catia人机工程

蓝色箭头表示关节的目前状态。
视点
这个选项照射到所选择的关节处,可以通过改变视点来保证在某个自由度上有最好的视 角。此功能更清晰的显示了动范围和更细致的操作蓝色箭头。
预先确定姿势
利用预先确定姿势功能可以预先确定人体模型姿态。从人体姿势预设定列表中可以选择 6 种人体姿态:
Initial(最初姿势)
点击人体姿势编辑按钮 上。
当人体模型被选择时,人体姿势编辑对话框便会出现在屏幕
人体姿势对话框包括以下几部分:
segment关节
hand filter手臂滤镜
side 一侧(左侧或右侧)
DOF自由度
value数值
display显示
predifinde预先确定的姿势
自由度可以在“数值(value)”或“图表展示(graphical representations)”部分
耦合:
人体 6 对关节运动范围(可弯曲性,功能极限)可以被耦合,其运动范围受到另一个节点 位置的限制。这些关节是锁骨、手臂、前臂、大腿、小腿和踝部。 耦合仅改变某个关节的运动,不会改变与之有关节点的位置。 在默认状态下,耦合选项处于关闭状态。
显示
显示功能中有两个选项:角度极限和视点
角度极限(图)
这个按钮可以显示或隐藏在某个自由度方向上运动角度极限值的图标表示。 两个箭头限制了关节的运动范围,在默认情况下是以 50%人口的运动极限值为依据。 绿色箭头表示向上极限; 黄色箭头表示向下极限;
Stand(站)
Sit(坐)
Span(伸展)
Kneel(跪)
选择或编辑自由度
本节讲述如何选择和设定人体自由度。 自由度按钮表示运动正在被编辑,例如自由度可以弯曲/伸展,外展/内收和旋转等
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
右键
肢体运动的自由度选项
本命令与上一命令(posture editor) 基本相同,操作简化、 人机模块操作-常用命令
点击之后 再点击人 体模型需 要移动的 部位,出 现图中对 话框后, 对罗盘进 行拖动。
二、 人机模块操作-其他命令
介绍另一种模型作业强度判定 的操作方法,可以参考学习、
使用。
操作步骤:开始—人机工程 学设计与分析—Human Activity Analysis。
二、 人机模块操作-其他命令
频次判定,小于4次/分为 间歇性,大于为连续性。
先点击模 型,之后 选择命令。
模型各部位作 业强度。
二、 人机模块操作-常用命令
1.模型设置命令
常用操作命令4个,和2个辅助命令
常用操作命令4个
辅助命令2个
其他命令在CATIA内使用频次不多, DELMIA软件使用,此处体现。
二、 人机模块操作-常用命令
注意 先点 结构 树
点击inserts a new manikin出 现图中对话框 切换man或woman, 其他选项默认即可。 设定人体 模型出现 在罗盘位 置
本命令可以 配合命令 (posture editor) 使用。
负荷对模型作业 等级存在影响。 综合判定结果
选择对模型各部位作业 等级存在影响。
三、 课程回顾与练习
1.课程回顾
a.人机模块介绍
c.模型运动命令 e.作业强度分析命令
b.模型设置命令
d.快速移动命令
2.练习
找一个困难作业的操作,运用人机模块进行仿真练习。
目录
一、 人机模块介绍 二、 人机模块操作 三、 课程回顾与练习
一、 人机模块介绍
总装使用人机模块分析时,常在product模块下插入模型人体。
进入此 界面
操作步骤:开始—人机工程学设计与 分析—Human Builder。
一、 人机模块介绍
测量命令条,不进行培训
模型运动命令条
课件内容
仿真分析命令条,不进行培训 模型设置命令条
选择Chinese(taiwan),若版本没有此选 项,选择korean。
根据需要选择模型人体的全身或局部。
模型人体出现或移动时的零点坐标,建议选 择Between Feet。
二、 人机模块操作-常用命令
透视图,调整 模型显示精度 点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
视野
平衡 重心 参考判断作业姿势强度, 红线表示人体不平衡
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框 本命令中其他操作需与其他 命令配合进行,演练说明。
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
先点击模 型,之后 选择命令, 出现图片 状态,点 击左键, 模型就会 快速移动。
二、 人机模块操作-其他命令
3.快速移动命令
课题:罗盘怎么 放回去?
操作步骤:右键点击罗盘— 选择图片命令—点击模型— 拖拽罗盘,模型相应跟着移 动。
二、 人机模块操作-其他命令
罗盘放回:
操作步骤:右键点击罗盘—选择图片命 令—拖拽罗盘至右下角绝对坐标—松开 罗盘即可。
后记
以上为CATIA人机模拟的基本操作,由于本人水平有 限,部分命令未进行讲解,后续与大家相互学习,相互提 高,谢谢!
感谢聆听!
二、 人机模块操作-其他命令
4.作业强度分析命令
选择图片中选 项
设置完成后模 型情况 本命令可以依据人体颜色对作业姿势强度进行判定
二
模型作业姿势强度判定依据:
人机模块操作-其他命令
主要指员工装配时,姿势是否
舒适,是否疲劳等,分析结果 以蓝色、橙色、红色显示。 蓝色:姿势舒适,接受; 橙色:姿势不舒适,易疲劳, 可让步接受; 红色:姿势不舒适,极易疲劳, 不能接受。
视图,点击右键出现命令条:1.截 图;2.调整视野参数;3.关闭
本命令和视野命令结合,判断是否盲装作业。
二、 人机模块操作-常用命令
2.模型运动命令
本命令条中的命令都为常用命令。
二、 人机模块操作-常用命令
点击之 后需点 击结构 树或数 模人体 模型, 出现图 中对话 框
调节自由度
二、 人机模块操作-常用命令
交叉点为模 型原点,与 之前模型添 加命令有关。
除非手动 输入坐标 值,否则 不能点击 确定(位 置会随鼠 标变动)
二、 人机模块操作-常用命令
课题:如何修改 模型原点位置?
操作步骤:点击Manikin—右键、选 择属性—寻找Referential。
二、 人机模块操作-常用命令
点击模型人体位置不同, 出现相对应的命令。
拖动 罗盘
本命令需要与 IK Behaviors 配合使用
二、 人机模块操作-常用命令
点击之后 再点击需 要抓取物 体的表面, 之后再点 击模型手 内面,手 就会快速 移动。
本命令属于快速 操作,通常使用 第二个。
二、 人机模块操作-常用命令
课题:如何修改 模型原点位置? 先点击模 型,之后 选择命令, 出现图片 状态,点 击左键, 模型就会 快速移动。