PFC2D微观力学离散元分析软件技术参数
PFC2D微观力学离散元分析软件技术参数
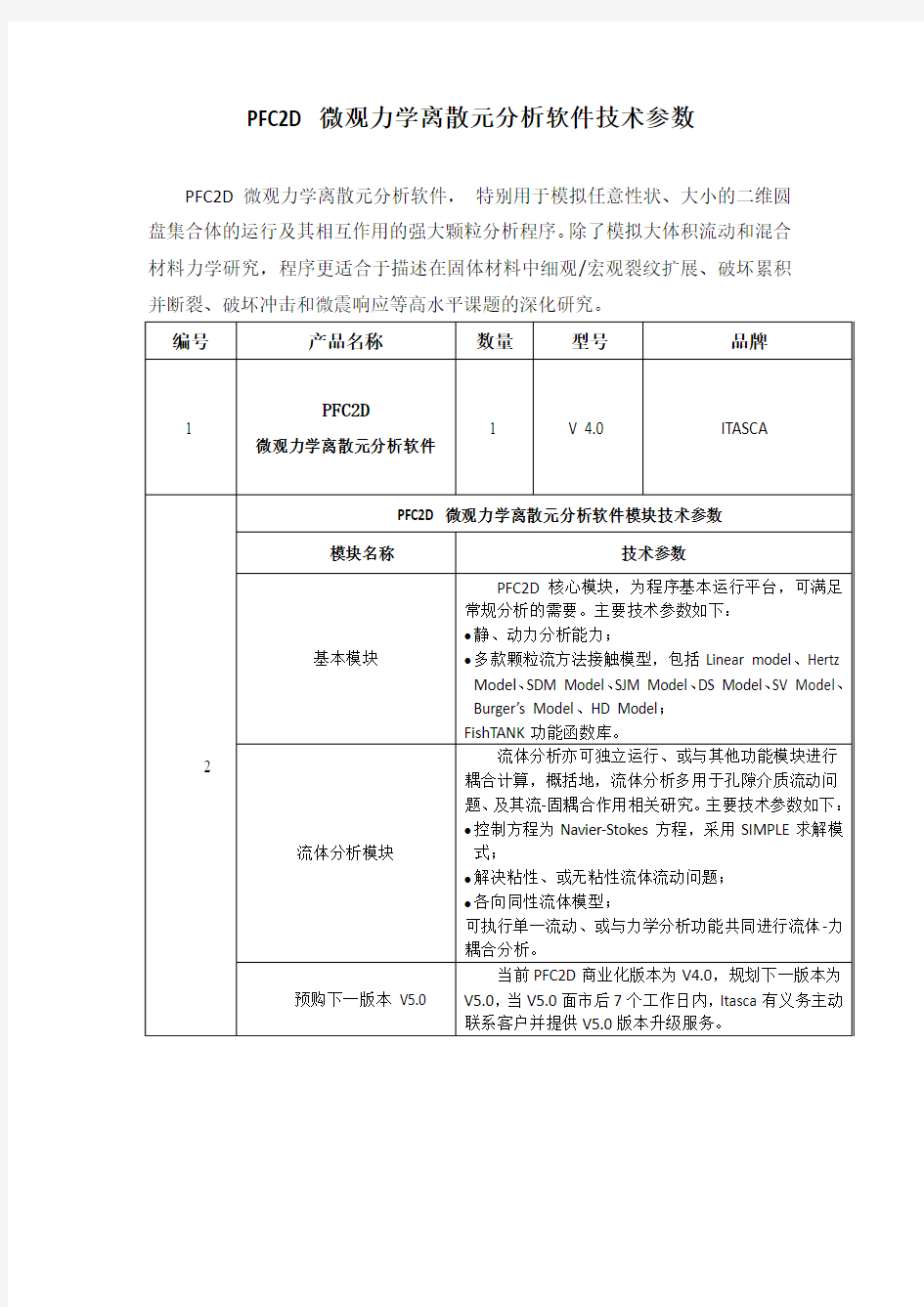
PFC2D微观力学离散元分析软件,特别用于模拟任意性状、大小的二维圆盘集合体的运行及其相互作用的强大颗粒分析程序。除了模拟大体积流动和混合材料力学研究,程序更适合于描述在固体材料中细观/宏观裂纹扩展、破坏累积并断裂、破坏冲击和微震响应等高水平课题的深化研究。
工程力学材料力学_知识点_及典型例题
作出图中AB杆的受力图。 A处固定铰支座 B处可动铰支座 作出图中AB、AC杆及整体的受力图。 B、C光滑面约束 A处铰链约束 DE柔性约束 作图示物系中各物体及整体的受力图。 AB杆:二力杆 E处固定端 C处铰链约束
(1)运动效应:力使物体的机械运动状态发生变化的效应。 (2)变形效应:力使物体的形状发生和尺寸改变的效应。 3、力的三要素:力的大小、方向、作用点。 4、力的表示方法: (1)力是矢量,在图示力时,常用一带箭头的线段来表示力;(注意表明力的方向和力的作用点!) (2)在书写力时,力矢量用加黑的字母或大写字母上打一横线表示,如F、G、F1等等。 5、约束的概念:对物体的运动起限制作用的装置。 6、约束力(约束反力):约束作用于被约束物体上的力。 约束力的方向总是与约束所能限制的运动方向相反。 约束力的作用点,在约束与被约束物体的接处 7、主动力:使物体产生运动或运动趋势的力。作用于被约束物体上的除约束力以外的其它力。 8、柔性约束:如绳索、链条、胶带等。 (1)约束的特点:只能限制物体原柔索伸长方向的运动。 (2)约束反力的特点:约束反力沿柔索的中心线作用,离开被约束物体。() 9、光滑接触面:物体放置在光滑的地面或搁置在光滑的槽体内。 (1)约束的特点:两物体的接触表面上的摩擦力忽略不计,视为光滑接触面约束。被约束的物体可以沿接触面滑动,但不能沿接触面的公法线方向压入接触面。 (2)约束反力的特点:光滑接触面的约束反力沿接触面的公法线,通过接触点,指向被约束物体。() 10、铰链约束:两个带有圆孔的物体,用光滑的圆柱型销钉相连接。 约束反力的特点:是方向未定的一个力;一般用一对正交的力来表示,指向假定。()11、固定铰支座 (1)约束的构造特点:把中间铰约束中的某一个构件换成支座,并与基础固定在一起,则构成了固定铰支座约束。
系统动力学(自己总结)
系统动力学 1.系统动力学的发展 系统动力学(简称SD—system dynamics)的出现于1956年,创始人为美国麻省理工学院的福瑞斯特教授。系统动力学是福瑞斯特教授于1958年为分析生产管理及库存管理等企业问题而提出的系统仿真方法,最初叫工业动态学。是一门分析研究信息反馈系统的学科,也是一门认识系统问题和解决系统问题的交叉综合学科。从系统方法论来说:系统动力学是结构的方法、功能的方法和历史的方法的统一。它基于系统论,吸收了控制论、信息论的精髓,是一门综合自然科学和社会科学的横向学科。 系统动力学的发展过程大致可分为三个阶段: 1)系统动力学的诞生—20世纪50-60年代 由于SD这种方法早期研究对象是以企业为中心的工业系统,初名也就叫工业动力学。这阶段主要是以福雷斯特教授在哈佛商业评论发表的《工业动力学》作为奠基之作,之后他又讲述了系统动力学的方法论和原理,系统产生动态行为的基本原理。后来,以福雷斯特教授对城市的兴衰问题进行深入的研究,提出了城市模型。 2)系统动力学发展成熟—20世纪70-80 这阶段主要的标准性成果是系统动力学世界模型与美国国家模型的研究成功。这两个模型的研究成功地解决了困扰经济学界长波问题,因此吸引了世界范围内学者的关注,促进它在世界范围内的传播与发展,确立了在社会经济问题研究中的学科地位。 3)系统动力学广泛运用与传播—20世纪90年代-至今 在这一阶段,SD在世界范围内得到广泛的传播,其应用范围更广泛,并且获得新的发展.系统动力学正加强与控制理论、系统科学、突变理论、耗散结构与分叉、结构稳定性分析、灵敏度分析、统计分析、参数估计、最优化技术应用、类属结构研究、专家系统等方面的联系。许多学者纷纷采用系统动力学方法来研究各自的社会经济问题,涉及到经济、能源、交通、环境、生态、生物、医学、工业、城市等广泛的领域。 2.系统动力学的原理 系统动力学是一门分析研究信息反馈系统的学科。它是系统科学中的一个分支,是跨越自然科学和社会科学的横向学科。系统动力学基于系统论,吸收控制论、信息论的精髓,是一门认识系统问题和解决系统问题交叉、综合性的新学科。从系统方法论来说,系统动力学的方法是结构方法、功能方法和历史方法的统一。 系统动力学是在系统论的基础上发展起来的,因此它包含着系统论的思想。系统动力学是以系统的结构决定着系统行为前提条件而展开研究的。它认为存在系统内的众多变量在它们相互作用的反馈环里有因果联系。反馈之间有系统的相
工程力学试题库材料力学
材料力学基本知识 复习要点 1. 材料力学的任务 材料力学的主要任务就是在满足刚度、强度和稳定性的基础上,以最经济的代价,为构件确定合理的截面形状和尺寸,选择合适的材料,为合理设计构件提供必要的理论基础和计算方法。 2. 变形固体及其基本假设 连续性假设:认为组成物体的物质密实地充满物体所在的空间,毫无空隙。 均匀性假设:认为物体内各处的力学性能完全相同。 各向同性假设:认为组成物体的材料沿各方向的力学性质完全相同。 小变形假设:认为构件在荷载作用下的变形与构件原始尺寸相比非常小。 3. 外力与内力的概念 外力:施加在结构上的外部荷载及支座反力。 内力:在外力作用下,构件内部各质点间相互作用力的改变量,即附加相互作用力。内力成对出现,等值、反向,分别作用在构件的两部分上。 4. 应力、正应力与切应力 应力:截面上任一点内力的集度。 正应力:垂直于截面的应力分量。 切应力:和截面相切的应力分量。 5. 截面法 分二留一,内力代替。可概括为四个字:截、弃、代、平。即:欲求某点处内力,假想用截面把构件截开为两部分,保留其中一部分,舍弃另一部分,用内力代替弃去部分对保留部分的作用力,并进行受力平衡分析,求出内力。 6. 变形与线应变切应变 变形:变形固体形状的改变。 线应变:单位长度的伸缩量。 练习题 一. 单选题 1、工程构件要正常安全的工作,必须满足一定的条件。下列除()项,
其他各项是必须满足的条件。 A、强度条件 B、刚度条件 C、稳定性条件 D、硬度条件 2、物体受力作用而发生变形,当外力去掉后又能恢复原来形状和尺寸的性质称 为() A.弹性B.塑性C.刚性D.稳定性 3、结构的超静定次数等于()。 A.未知力的数目B.未知力数目与独立平衡方程数目的差数 C.支座反力的数目D.支座反力数目与独立平衡方程数目的差数 4、各向同性假设认为,材料内部各点的()是相同的。 A.力学性质 B.外力 C.变形 D.位移 5、根据小变形条件,可以认为() A.构件不变形 B.结构不变形 C.构件仅发生弹性变形 D.构件变形远小于其原始尺寸 6、构件的强度、刚度和稳定性() A.只与材料的力学性质有关 B.只与构件的形状尺寸有关 C.与二者都有关 D. 与二者都无关7、 在下列各工程材料中,()不可应用各向同性假设。 A.铸铁 B.玻璃 C.松木 D.铸铜 二. 填空题 1. 变形固体的变形可分为和。 2. 构件安全工作的基本要求是:构件必须具有、和足够 的稳定性。(同:材料在使用过程中提出三方面的性能要求,即、、。) 3. 材料力学中杆件变形的基本形式有 。 4. 材料力学中,对变形固体做了 四个基本假设。 、、和、、、
第3章 刚体力学基础
第3章 刚体力学基础 一、基本要求 1.理解质点及刚体转动惯量、角动量的概念,并会计算质点及刚体(规则形状刚体)的转动惯量、角动量; 2.理解刚体绕定轴转动的转动定律,并应用它来求解定轴转动刚体力矩和角加速度等问题; 3.会计算力矩的功、刚体的转动动能、刚体的重力势能,会应用机械能守恒定律解答刚体定轴转动问题; 4.掌握刚体的角动量定理和角动量守恒定律,并会分析解决含有定轴转动刚体系统的力学问题(质点与刚体碰撞类问题等)。 二、基本内容 (一)本章重点和难点: 重点:刚体绕定轴转动定律及角动量守恒定律。 难点:刚体绕定轴转动系统的角动量守恒定律及其应用。 (二) 知识网络结构图: ?????? ???????????????????角动量守恒定律定轴转动定律基本定律转动动能角动量冲量矩转动惯量力矩基本物理量 (三)容易混淆的概念: 1.转动惯量和质量 转动惯量反映刚体转动状态改变的难易程度,即刚体的转动惯性大小的量度;质量反映质点运动状态改变的难易程度,即质点的惯性大小的量度。
2.平动动能和转动动能 平动动能是与质量和平动速度的平方成正比;转动动能是与转动惯量和角速度的平方成正比。 (四)主要内容: 1.描述刚体定轴转动的角位置θ,角位移θ?、角速度ω和角加速度α(β)等物理量 t t d d ,d d ωαθω== 角量与线量的关系: 2n t ωαω θr a r a r v r s ==== 2.转动惯量--转动质点对转轴的转动惯量,等于转动质点的质量m 成以质点到转轴的距离r 的平方。2J m r =? (1)质量连续分布的刚体: ?=m r J d 2 线分布:dl dm ?=λ λ-质量线分布刚体,单位长度的质量。 面分布:dS dm ?=σ σ- 质量面分布刚体,单位面积的质量。 体分布:dV dm ?=ρ ρ 质量体分布刚体,单位体积的质量。 (2)质量离散分布刚体的转动惯量:2 i J m r =?∑ (3)平行轴定理 2 C J J md =+ 3.刚体绕定轴转动的转动定律—刚体的合外力矩等于转动惯量乘以角加速度。 t J J M d d ω α== i i i M M r F ==?∑∑ 力矩:F r M ?= 力对轴的力矩大小:θsin rF M =
土壤-机器系统力学
土壤-机器系统力学 研究机器在作业和行驶中与土壤相互作用的力学问题的一门学科。或称耕作与行驶土壤动力学。其任务是探明机器作用于土壤和土壤所起反应的规律;在土壤基础行为属性水平上建立相互关系的数学模型,以期能预测机器的行驶性能、作业质量、效率、能耗和经济性,以及土壤在机器通过和作业后的性能变化、压实、水土流失等问题,从而合理研制和设计机器的结构形态,优化机器和机器系统的设计和运用,保护土壤生态系统和农业资源。 概述在农业机械领域内,土壤-机器系统力学的研究包括两部分:一是由土壤支承并借土壤对机器的反作用而产生驱动力的行走理论,即土壤-车辆系统力学,其研究对象是拖拉机和农业机械的行走装置;二是对土壤进行机械作业的耕作理论,即土壤耕作力学,其研究对象是土壤耕作机械和农田建设机械中的土方作业机械。 土壤-机器系统力学所涉及的,一般是深度在几十厘米以内的耕作层或地面土壤,而且机器是在广阔的地面上、在不同的季节以较高的速度对小范围饱和或非饱和的各种土壤施加复杂的载荷,使土壤在短时间内产生较大的变形。这与经典土力学所处理的建筑物地基与土壤的相互作用有较大的差异,后者是长年在固定地点以相当大的静载荷或地震波作用于较大范围、深达几十米的土壤,使土壤产生缓慢而相对微小的变化。因而不能完全采用经典土力学和土动力学的某些相类似的假定、理论、公式和方法。对于土壤物质的多样性和性质的多变性,机器作用力的复杂性,土壤反应因应力路径、载荷历史而不同的特性,以及速率效应、机器振动等的特点,结合耕作、土方工程和越野行驶的技术要求进行的研究,要以19世纪末至20世纪30年代苏联的Β.Π.戈里亚奇金和美国的M.L.尼科尔斯的研究为开端。至第二次世界大战末期,特别是50年代以后,土壤-机器系统力学逐步形成一门独特的新学科,它的形成和发展与机器力学、土壤物理、土力学、土动力学、连续介质力学、流变学、系统力学、随机过程和数理统计,以及新的分析方法和数值方法的发展有密切联系。 中国这方面的研究始于20世纪50年代中期。首先是建立室内试验土槽进行了拖拉机水田叶轮的研究;60年代初设计了贝氏仪,发展了船式拖拉机浮式和半浮式工作原理;进行了电渗犁的试验和犁耕土垡运动和阻力的分析;70年代初研制了水田土壤剪切仪、静载式和动载式水田土壤承压仪和水田土壤外附力/内聚力测定仪;并应用这些仪器对水田土壤参数与不同行走装置性能的关系进行了研究,提出了由土壤内聚力产生的推进力和由于沉陷、壅泥、积泥等外应力产生的行走阻力计算公式。70年代末至80年代初,还进行了水田土壤流变及触变性质的研究,提出了水田土壤的应力-应变-时间模型和水田土壤含水量与触变率之间的函数关系;进行了犁体曲面数学模型和优化。80年代以来进行的有土壤对金属表面粘附的机理研究与测定,履带和轮胎附着、驱动、压实性能和精确喷印网格法的研究,土壤切削的二维和三维有限元分析等。 研究内容在农业机械领域内,土壤-机器系统力学研究的主要内容包括:①各种土壤参数(材料特性、静力学特性、动力学特性、物理量传导特性、行为属性、综合特性等)的测试技术和田间快速测定技术及分布规律;②土壤行为属性机理、应力-应变模型、本构关系、失效理论;③典型行走装置(钢轮、叶轮、胎轮、金属履带、橡胶履带等)与土壤相互作用的基础工艺过程,其接地压强、沉陷量、驱动力、行驶阻力、滑行率间的定性定量关系,行走装置构型和设计的优化;④拖拉机及其机组、各种自走式农业机械在各种土壤和地面条件下的牵引性能、通过性能、越障性能、转向操纵性、振动特性、行驶稳定性和运输效率; ⑤土壤耕作机械和土方作业机械在以不同方式切削、挖掘、推移、破碎和抛置土壤的作业过程中,土壤的变形、破坏、移动、受力和能耗与土壤参数、机器结构参数和作业参数间的定性、定量关系,工作部件构型和设计的优化;⑥拖拉机和各种田间作业机械对土壤的压实、水土流失与土壤参数、机器结构参数、作业参数之间的定性、定量关系,以及机组结构形态
工程力学材料力学部分习题答案
工程力学材料力学部分习题答案
b2.9 题图2.9所示中段开槽的杆件,两端受轴向载荷P 的作用,试计算截面1-1和2-2上的应力。已知:P = 140kN ,b = 200mm ,b 0 = 100mm ,t = 4mm 。 题图2.9 解:(1) 计算杆的轴力 kN 14021===P N N (2) 计算横截面的面积 21m m 8004200=?=?=t b A 202mm 4004)100200()(=?-=?-=t b b A (3) 计算正应力 MPa 1758001000140111=?== A N σ MPa 350400 1000 140222=?== A N σ (注:本题的目的是说明在一段轴力相同的杆件内,横截面面积小的截面为该段 的危险截面) 2.10 横截面面积A=2cm 2的杆受轴向拉伸,力P=10kN ,求其法线与轴向成30°的及45°斜截面上的应力ασ及ατ,并问m ax τ发生在哪一个截面? 解:(1) 计算杆的轴力 kN 10==P N (2) 计算横截面上的正应力 MPa 50100 2100010=??==A N σ (3) 计算斜截面上的应力 MPa 5.37235030cos 2 230 =??? ? ???==ο ο σσ
MPa 6.212 3250)302 sin(2 30=?= ?= οο σ τ MPa 25225045cos 2 245 =??? ? ???==οο σσ MPa 2512 50 )452 sin(2 45=?= ?= οο σ τ (4) m ax τ发生的截面 ∵ 0)2cos(==ασα τα d d 取得极值 ∴ 0)2cos(=α 因此:2 2π α= , ο454 == π α 故:m ax τ发生在其法线与轴向成45°的截面上。 (注:本题的结果告诉我们,如果拉压杆处横截面的正应力,就可以计算该处任意方向截面的正应力和剪应力。对于拉压杆而言,最大剪应力发生在其法线与轴向成45°的截面上,最大正应力发生在横截面上,横截面上剪应力为零) 2.17 题图2.17所示阶梯直杆AC ,P =10kN ,l 1=l 2=400mm ,A 1=2A 2=100mm 2,E =200GPa 。试计算杆AC 的轴向变形Δl 。 题图2.17 解:(1) 计算直杆各段的轴力及画轴力图 kN 101==P N (拉) kN 102-=-=P N (压)
主要的离散元软件介绍
主要的离散元软件介绍 离散元方法(DEM)首次于20世纪70年代由CundallandStrack 在《A discrete numerical model for granular assemblies》一文提出,并不断得到学者的关注和发展。 PFC3D模拟效果 该方法最早应用于岩石力学问题的分析,后逐渐应用于散状物料和粉体工程领域。由于散状物料通常表现出复杂的运动行为和力学行为,这些行为难以直接使用现有基本理论,尤其是基于连续介质理论的方法来解释,而进行实验研究则成本高、周期长,DEM仿真技术的应用范围将会越来越广。 (1)商用软件 目前开发离散元商用程序最有名的公司要属由离散元思想首创者Cundall加盟的ITASCA国际工程咨询公司。该公司开发的二维UDEC(universal distinct element code)和三维3DEC(3-dimensional distinct elementcode)块体离散元程序,主要用于模拟节理岩石或离散块体岩石在准静或动载条件下力学过程及采矿过程的工程问题。
该公司开发的PFC2D和PFC3D(particle flow code in 2/3 dimensions)则分别为基于二维圆盘单元和三维圆球单元的离散元程序。它主要用于模拟大量颗粒元的非线性相互作用下的总体流动和材料的混合,含破损累计导致的破裂、动态破坏和地震响应等问题。 EDEM是世界上第一个用现代化离散元模型科技设计的用来模拟和分析颗粒的处理和生产操作的通用CAE软件。使用EDEM,可以快速、简便的为颗粒固体系统建立一个参数化模型,可以导入真实颗粒的CAD模型来准确描述它们的形状。现在大量应用于欧美国家中的采矿、煤炭、石油、化工、钢铁和医药等诸多领域。 中国科学院非连续介质力学与工程灾害联合实验室与极道成然科技有限公司联合开发了国内最新的离散元大型商用软件GDEM,该软件基于中科院力学所非连续介质力学与工程灾害联合实验室开发的CDEM算法,将有限元与块体离散元进行有机结合,并利用GPU加速技术,可以高效的计算从连续到非连续整个过程。 由中冶赛迪公司在冶金、矿山、工程机械工程应用基础上,2013年推出的大型商业软件StreamDEM,是国内首款完全拥有完全独立的自主知识产权,代表了离散元的最高发展水平,让国人和世界站在了同一起跑线上。 (2)开源软件 BALL & TRUBAL (1979–1980) distinct element method (FORTRAN code), originally written by P.Cundall and currently maintained by Colin Thornton.
习题3 刚体力学基础
习题3 刚体力学基础 习题3 3-1刚体平动的特点是什么?平动时刚体上的质元是否可以作曲线运动? 解:刚体平动的特点是:在运动过程中,内部任意两质元间的连线在各个时刻的位置 都和初始时刻的位置保持平行。平动时刚体上的质元可以作曲线运动。 3-2刚体定轴转动的特点是什么?刚体定轴转动时各质元的角速度、线速度、向心加 速度、切向加速度是否相同? 解:刚体定轴转动的特点是:轴上所有各点都保持不动,轴外所有各点都在作圆周运动,且在同一时间间隔内转过的角度都一样;刚体上各质元的角量相同,而各质元的线量 大小与质元到转轴的距离成正比。因此各质元的角速度相同,而线速度、向心加速度、切 向加速度不一定相同。 3-3刚体的转动惯量与哪些因素有关?请举例说明。 解:刚体的转动惯量与刚体的质量、质量的分布、转轴的位置等有关。如对过圆心且 与盘面垂直的轴的转动惯量而言,形状大小完全相同的木质圆盘和铁质圆盘中铁质的要大 一些,质量相同的木质圆盘和木质圆环则是木质圆环的转动惯量要大。 3-4 刚体所受的合外力为零,其合力矩是否一定为零?相反, 刚体受到的合力矩为零,其合外力是否一定为零? 解:刚体所受的合外力为零,其合力矩不一定为零;刚体受到的合力矩为零,其合外 力不一定为零。 3-5有一半径为R 的水平圆转台,可绕通过其中心的竖直固定光滑轴转动,转动惯量 为J ,开始时转台以匀角速度ω0转动,此时有一质量为m 的人站在转台中心,随后人 沿半径向外跑去,当人到达转台边缘时,转台的角速度为多少? 解:人在跑的过程中人和转台这一系统所受外力对竖直轴的力矩为零,所以系统对轴 的角动量守恒。令人到达转台边缘时转台的角速度为ω,则有 J ω0=(J +mR 2) ω 由此可得ω= J ω0 2J +mR 3-6如题3-6图所示,一光滑的内表面半径为10cm 的半球形碗,以匀角速度ω绕其 对称轴OC 旋转,已知放在碗内表面上的一个小球P 相对于碗静止,其位置高于碗底4cm ,则由此可推知碗旋转的角速度为多少?
4-第3章 有限元分析的力学基础
第3章有限元分析的力学基础 由固体材料组成的具有一定形状的物体在一定约束边界下(外力、温度、位移约束等)将产生变形(deformation),该物体中任意一个位置的材料都处于复杂的受力状态之中,本章将定义用于刻画任意形状弹性变形体的力学变量和表达这些变量之间的关系。具体地,将在五个简化条件下,定义有关位移、变形、力的三大类变量,推导这些变量之间的三大类方程,给出典型的两类边界条件,本章的主要内容就是弹性力学中的基础部分。 3.1 变形体的描述、变量定义、分量表达 3.1.1 变形体 在外力的作用下,若物体内任意两点之间发生相对移动,这样的物体叫做变形体(deformed body),它与材料的物理性质密切相关。如果从几何形状的复杂程度来考虑,变形体又可分为简单形状变形体和任意形状变形体。简单变形体如杆、梁、柱等,材料力学和结构力学研究的主要对象就是简单变形体,而弹性力学则处理任意形状变形体。有限元方法所处理的对象为任意形状变形体,因而,弹性力学中有关变量和方程的描述将是有限元方法的重要基础。 3.1.2 基本变量 当一个变形体受到外界的作用(如外力或约束的作用)时,如何来描述它?首先,我们可以观察到物体在受力后产生了内部和外部位置的变化,因此,物体各点的位移应该是最直接的变量,它将受到物体的形状、组成物体的材质以及外力的影响,变形体的完整描述如图3.1所示。 图3.1 变形体的描述 描述位移是最直接的,因为可以直接观测,描述力和材料特性是间接的,需要我们去定义新的变量,如图3.2所示,可以看出应包括位移、变形程度、受力状态这三个方面的变量,当然,还应有材料参数来描述物体的材料特性。
机械系统动力学
《机械系统动力学》 机械系统动力学中分析中的 仿真前沿 学院:机械工程学院 专业:机制一班 姓名:董正凯 学号:S12080201006
摘要 计算机及其相应技术的发展为建立机械系统仿真提供了一个有效的手段,机械系统动力学中的许多难题均可以采用仿真技术来解决,本文主要讲述了目前在机械系统动力学的分析中仿真技术主要的研究重点及其研究中主要存在的问题。 关键词:机械系统动力学仿真系统建模
机械系统动力学中分析中的仿真前沿 机械专业既是一个传统的专业,又是一个不断融合新技术、不断创新的专业。随着科技的发展,计算机仿真技术越来越广泛地应用在各个领域。基于多体系统动力学的机械系统动力学分析与仿真技术,从二十世纪七十年代开始吸引了众多研究者,已解决了自动化建模和求解问题的基础理论问题,并于八十年代形成了一系列商业化软件,到了九十年代,机械系统动力学分析与仿真技术更已能成熟应用于工业界。 目前的研究重点表现在以下几个方面: (1)柔性多体系统动力学的建模理论 多刚体系统的建模理论已经成熟,目前柔性多体系统的建模成了一个研究热点,柔性多体系统动力学由于本身既存在大范围的刚体运动又存在弹性变形运动,因而其与有限元分析方法及多刚体力学分析方法有密切关系。事实上,绝对的刚体运动不存在,绝对的弹性动力学问题在工程实际中也少见,实际工程问题严格说都是柔性多体动力学问题,只不过为了问题的简化容易求解,不得不化简为多刚体动力学问题、结构动力学问题来处理。然而这给使用者带来了不便,同一个问题必须利用两种分析方法处理。大多商用软件系统采用的浮动标架法对处理小变形部件的柔性系统较为有效,对包含大变形部件的柔体多体系统会产生较大仿真分析误差甚至完全错误的仿真结论。最近提出的绝对节点坐标方法,是对有限元技术的拓展和较大创新,在常规有限元中梁单元、板壳单元采用节点微小转动作为节点坐标,因而不能精确描述刚体运动。绝对节点坐标法则采用节点位移和节点斜率作为节点坐标,其形函数可以描述任意刚体位移。利用这种方法梁和板壳可以看作是等参单元,系统的质量阵为一常数阵,然而其刚度阵为强非线性阵,这与浮动标架法有截然不同的区别。这种方法已成功应用于手术线的大变形仿真中。寻求有限元分析与多刚体力学的统一近年来成为多体动力学分析的一个研究热点,绝对节点坐标法在这方面有极大的潜力,可以说绝对节点坐标法是柔性多体力学发展的一个重要进展。另外,各种柔性多体的分析方法之间是否存在某种互推关系也引起了人们的注意,如两个主要分析方法:浮动标架法、绝对节点坐标法之间是否可以互推?这些都具有重大理论意义。 另外柔性多体系统动力学中由于大范围的刚体运动与弹性变形运动相互耦合,采用浮动标架法时,即便是小变形问题,由于处于高速旋转仍会产生动力刚化现象。如果仅仅采用小变形理论,将产生错误的结论,必须计及动力刚化效应。动力刚化现象已成为柔性多体动力学的一个重要研究方面。如何利用简单的补偿方法来考虑动力刚化是问题的关键。 柔性多体系统动力学中关于柔性体的离散化表达存在三种形式:基于有限元分析的模态表达,基于试验模态分析的模态表达和基于有限元节点坐标的有限元列式。有限元列式由于大大地增加了系统的求解规模使其应用受到限制,因而一般采用模态分析方法,对模态进行模态截断、模态综合,从而缩减系统的求解规模。为了保证求解精度,同时又能提高求解速度如何进行模态截断、模态综合就成了一个关键问题。再者如何充分利用试验模态分析的结果也是一个关键性研究课题,这一方面的研究还不够深入。 柔性多体系统动力学可以计算出每一时刻的弹性位移,通过计算应变可计算计算出应力。由于一般的多柔体分析程序不具备有限元分析功能,因而柔性体的应力分析都是由有限元程序处理。由于可以计算出每个柔性体的应力的变化历
工程力学材料力学答案
4-1 试求题4-1图所示各梁支座的约束力。设力的单位为kN,力偶矩的单位为kN m,长度单位为m,分布载荷集度为kN/m。(提示:计算非均布载荷的投影和与力矩和时需应用积分)。 解: (b):(1) 整体受力分析,画出受力图(平面任意力系); (2) 选坐标系Axy,列出平衡方程; 约束力的方向如图所示。 (c):(1) 研究AB杆,受力分析,画出受力图(平面任意力系); (2) 选坐标系Axy,列出平衡方程; 约束力的方向如图所示。 (e):(1) 研究CABD杆,受力分析,画出受力图(平面任意力系); (2) 选坐标系Axy,列出平衡方程; 约束力的方向如图所示。 4-5 AB梁一端砌在墙内,在自由端装有滑轮用以匀速吊起重物D,设重物的重量为G,又AB长为b,斜绳与铅垂线成角,求固定端的约束力。 解:(1) 研究AB杆(带滑轮),受力分析,画出受力图(平面任意力系); (2) 选坐标系Bxy,列出平衡方程; 约束力的方向如图所示。 4-7 练钢炉的送料机由跑车A和可移动的桥B组成。跑车可沿桥上的轨道运动,两轮间距离为2 m,跑车与操作架、平臂OC以及料斗C相连,料斗每次装载物料重W=15 kN,平臂长OC=5 m。设跑车A,操作架D和所有附件总重为P。作用于操作架的轴线,问P至少应多大才能使料斗在满载时跑车不致翻倒? 解:(1) 研究跑车与操作架、平臂OC以及料斗C,受力分析,画出受力图(平面平行力系); (2) 选F点为矩心,列出平衡方程; (3) 不翻倒的条件; 4-13 活动梯子置于光滑水平面上,并在铅垂面内,梯子两部分AC和AB各重为Q,重心在A点,彼此用铰链A和绳子DE连接。一人重为P立于F处,试求绳子DE的拉力和B、C两点的约束力。 解:(1):研究整体,受力分析,画出受力图(平面平行力系); (2) 选坐标系Bxy,列出平衡方程; (3) 研究AB,受力分析,画出受力图(平面任意力系); (4) 选A点为矩心,列出平衡方程; 4-15 在齿条送料机构中杠杆AB=500 mm,AC=100 mm,齿条受到水平阻力FQ的作用。已知Q=5000 N,各零件自重不计,试求移动齿条时在点B的作用力F是多少? 解:(1) 研究齿条和插瓜(二力杆),受力分析,画出受力图(平面任意力系); (2) 选x轴为投影轴,列出平衡方程; (3) 研究杠杆AB,受力分析,画出受力图(平面任意力系); (4) 选C点为矩心,列出平衡方程; 4-16 由AC和CD构成的复合梁通过铰链C连接,它的支承和受力如题4-16图所示。已知均布载荷集度q=10 kN/m,力偶M=40 kN m,a=2 m,不计梁重,试求支座A、B、D的约束力和铰链C所受的力。 解:(1) 研究CD杆,受力分析,画出受力图(平面平行力系); (2) 选坐标系Cxy,列出平衡方程;
有限元分析理论基础
有限元分析概念 有限元法:把求解区域看作由许多小的在节点处相互连接的单元(子域)所构成,其模型给出基本方程的分片(子域)近似解,由于单元(子域)可以被分割成各种形状和大小不同的尺寸,所以它能很好地适应复杂的几何形状、复杂的材料特性和复杂的边界条件 有限元模型:它是真实系统理想化的数学抽象。由一些简单形状的单元组成,单元之间通过节点连接,并承受一定载荷。 有限元分析:是利用数学近似的方法对真实物理系统(几何和载荷工况)进行模拟。并利用简单而又相互作用的元素,即单元,就可以用有限数量的未知量去逼近无限未知量的真实系统。 线弹性有限元是以理想弹性体为研究对象的,所考虑的变形建立在小变形假设的基础上。在这类问题中,材料的应力与应变呈线性关系,满足广义胡克定律;应力与应变也是线性关系,线弹性问题可归结为求解线性方程问题,所以只需要较少的计算时间。如果采用高效的代数方程组求解方法,也有助于降低有限元分析的时间。 线弹性有限元一般包括线弹性静力学分析与线弹性动力学分析两方面。 非线性问题与线弹性问题的区别: 1)非线性问题的方程是非线性的,一般需要迭代求解; 2)非线性问题不能采用叠加原理; 3)非线性问题不总有一致解,有时甚至没有解。 有限元求解非线性问题可分为以下三类:
1)材料非线性问题 材料的应力和应变是非线性的,但应力与应变却很微小,此时应变与位移呈线性关系,这类问题属于材料的非线性问题。由于从理论上还不能提供能普遍接受的本构关系,所以,一般材料的应力与应变之间的非线性关系要基于试验数据,有时非线性材料特性可用数学模型进行模拟,尽管这些模型总有他们的局限性。在工程实际中较为重要的材料非线性问题有:非线性弹性(包括分段线弹性)、弹塑性、粘塑性及蠕变等。 2)几何非线性问题 几何非线性问题是由于位移之间存在非线性关系引起的。 当物体的位移较大时,应变与位移的关系是非线性关系。研究这类问题一般都是假定材料的应力和应变呈线性关系。它包括大位移大应变及大位移小应变问题。如结构的弹性屈曲问题属于大位移小应变问题,橡胶部件形成过程为大应变问题。 3)非线性边界问题 在加工、密封、撞击等问题中,接触和摩擦的作用不可忽视,接触边界属于高度非线性边界。 平时遇到的一些接触问题,如齿轮传动、冲压成型、轧制成型、橡胶减振器、紧配合装配等,当一个结构与另一个结构或外部边界相接触时通常要考虑非线性边界条件。 实际的非线性可能同时出现上述两种或三种非线性问题。
最新工程力学(静力学与材料力学)第四版习题答案
静力学部分 第一章基本概念受力图
2-1 解:由解析法, 23cos 80RX F X P P N θ==+=∑ 12sin 140RY F Y P P N θ==+=∑ 故: 22161.2R RX RY F F F N =+= 1(,)arccos 2944RY R R F F P F '∠==
2-2 解:即求此力系的合力,沿OB 建立x 坐标,由解析法,有 123cos45cos453RX F X P P P KN ==++=∑ 13sin 45sin 450 RY F Y P P ==-=∑ 故: 223R RX RY F F F KN =+= 方向沿OB 。 2-3 解:所有杆件均为二力杆件,受力沿直杆轴线。 (a ) 由平衡方程有: 0X =∑ sin 300 AC AB F F -= 0Y =∑ cos300 AC F W -= 0.577AB F W =(拉力) 1.155AC F W =(压力) (b ) 由平衡方程有:
0X =∑ cos 700 AC AB F F -= 0Y =∑ sin 700 AB F W -= 1.064AB F W =(拉力) 0.364AC F W =(压力) (c ) 由平衡方程有: 0X =∑ cos 60cos300 AC AB F F -= 0Y =∑ sin 30sin 600 AB AC F F W +-= 0.5AB F W = (拉力) 0.866AC F W =(压力) (d ) 由平衡方程有: 0X =∑ sin 30sin 300 AB AC F F -= 0Y =∑ cos30cos300 AB AC F F W +-= 0.577AB F W = (拉力) 0.577AC F W = (拉力)
工程力学材料力学答案-第十一章解析
11-6 图示悬臂梁,横截面为矩形,承受载荷F 1与F 2作用,且F 1=2F 2=5 kN ,试计算梁内的 最大弯曲正应力,及该应力所在截面上K 点处的弯曲正应力。 解:(1) 画梁的弯矩图 (2) 最大弯矩(位于固定端): max 7.5 M kN = (3) 计算应力: 最大应力: K 点的应力: 11-7 图示梁,由No22槽钢制成,弯矩M =80 N.m ,并位于纵向对称面(即x-y 平面)内。 试求梁内的最大弯曲拉应力与最大弯曲压应力。 解:(1) 查表得截面的几何性质: 4020.3 79 176 z y mm b mm I cm === (2) 最大弯曲拉应力(发生在下边缘点处) ()30max 8 80(7920.3)10 2.67 17610x M b y MPa I σ -+-?-?-?===? 6max max max 22 7.510176 408066 Z M M MPa bh W σ?====?6max max 33 7.51030 132 ******** K Z M y M y MPa bh I σ????====? x M 1 z M M z
(3) 最大弯曲压应力(发生在上边缘点处) 30max 8 8020.3100.92 17610 x M y MPa I σ ---???===? 11-8 图示简支梁,由No28工字钢制成,在集度为q 的均布载荷作用下,测得横截面C 底 边的纵向正应变ε=3.0×10-4,试计算梁内的最大弯曲正应力,已知钢的弹性模量E =200 Gpa ,a =1 m 。 解:(1) 求支反力 31 44 A B R qa R qa = = (2) 画内力图 (3) 由胡克定律求得截面C 下边缘点的拉应力为: 49max 3.010******* C E MPa σε+-=?=???= 也可以表达为: 2 max 4C C z z qa M W W σ+== (4) 梁内的最大弯曲正应力: 2 max max max 993267.5 8 C z z qa M MPa W W σσ+ = === q x x F S M
【CN110046388A】一种基于EDEMFLUENT离散元流固耦合建模方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910193703.3 (22)申请日 2019.03.14 (71)申请人 中铁二院工程集团有限责任公司 地址 610000 四川省成都市金牛区通锦路 三号 申请人 西南交通大学 (72)发明人 杨长卫 郭晋豪 王智猛 刘阳 王建 童心豪 郭雪岩 李宗昊 张斌 卢兴旺 (74)专利代理机构 成都环泰知识产权代理事务 所(特殊普通合伙) 51242 代理人 赵红欣 李斌 (51)Int.Cl. G06F 17/50(2006.01) (54)发明名称一种基于EDEM-FLUENT离散元流固耦合建模方法(57)摘要本发明公开了岩土方面的数值模拟分析计算技术领域的一种基于EDEM -FLUENT离散元流固耦合建模方法,先利用前处理软件对模型进行建模、划分网格和设置边界条件等并导出模型文件,然后将模型文件导入到FLUENT和EDEM当中,在FLUENT中进行注浆浆液属性的设置,在EDEM中进行土体宏观和微观参数的设置,并且注意单位的设置,然后FLUENT与EDEM共同计算迭代至收敛;本发明通过有限元网格计算引入到离散元颗粒流计算当中,将浆液的连续性和土体的离散性质都准确地模拟出来,为从事注浆研究的科研工 作者提供了创新性的研究思路。权利要求书1页 说明书4页 附图6页CN 110046388 A 2019.07.23 C N 110046388 A
权 利 要 求 书1/1页CN 110046388 A 1.一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于,具体步骤如下: 第一步,利用Gambit等前处理软件对路基模型进行建模,选择最合适计算的网格类型划分好网格,设置合适的边界条件,并导出网格文件; 第二步,将所述网格文件导入到FLUENT中,并且在FLUENT中对连续介质注浆浆液参数设定和等待计算; 第三步,将所述网格文件导入到EDEM中,填充离散元土体颗粒,设置土体参数和土体之间微观作用力参数; 第四步,将FLUENT中迭代时间步长设置为EDEM中时间步长的1~100倍,在FLUENT中设置模拟时间,然后等待自动迭代计算至收敛。 2.根据权利要求1所述的一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于:所述自动迭代计算为耦合模拟计算。 3.根据权利要求2所述的一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于,所述耦合模拟计算的方法为: 第一步,EDEM中计算颗粒的速度和位置等信息; 第二步,FLUENT中计算每个网络中包含的颗粒体积分数; 第三步,EDEM中计算浆液对土体的作用力; 第四步,FLUENT中计算浆液与土体之间的动量、能量等交换; 第五步,根据能量和动量等的交换相,在FLUENT中计算流体运动; 第六步,将所述第五步中计算的流体运动向EDEM中传递流体速度,重新进行所述第三步的操作; 第七步,通过重新进行的所述第三步的操作向EDEM中传递浆液对土体的作用力,重新进行所述第一步的操作,循环往复。 4.根据权利要求1所述的一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于,所述第二步导入FLUENT中对网格模型设置浆液的计算参数为:Density(kg/m3)选择constant且参数设置为1760,Viscosity(kg/m-s)选择constant且参数设置为0.06。 5.根据权利要求1所述的一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于,所述第三步中土体参数的设置为:Poisson’s Ratio(V)0.28,Solids Density(p) 1920kg/m3,Shear Modulus(G)20664e+06 Fa,Work Function 0 eV,Coefficient of Restitution 0.5,Coefficient of Static Friction 0.5,Coefficient of Rolling Friction 0.01。 6.根据权利要求1所述的一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于:所述第四步中FLUENT中时间步长的设置为:Run Culculation选择Check Case,Time Stepping Method的时间步长设置为0.0002和2000,Max Iteration/Time Step设置为20,Reproting Interval设置为1,Profile Update Interval设置为1。 7.根据权利要求1所述的一种基于EDEM-FLUENT离散元流固耦合建模方法,其特征在于:所述第四步中EDEM中时间步长的设置为:Time Integaration选择Euler,Fixed Time Step设置为14.5803%、4e-05s,Total Time设置为30s,Target Save Interval设置为0.1s,Call Size设置为5 Rmin、15mm。 2
3 刚体力学习题详解
习题三 一、选择题 1.一根长为、质量为M的匀质棒自由悬挂于通过其上端的光滑水平轴 上。现有一质量为m的子弹以水平速度v0射向棒的中心,并以v0/2的水平 速度穿出棒,此后棒的最大偏转角恰为,则v0的大小为 [ ] (A);(B);(C);(D)。 答案:A 解: ,, ,, ,,,所以 2.圆柱体以80rad/s的角速度绕其轴线转动,它对该轴的转动惯量为。 在恒力矩作用下,10s内其角速度降为40rad/s。圆柱体损失的动能和所 受力矩的大小为 [ ] (A)80J,80;(B)800J,40;(C)4000J,32;(D)9600J, 16。 答案:D 解:,,, 恒定,匀变速,所以有 ,, 3.一个转动惯量为J的圆盘绕一固定轴转动,初角速度为。设它所受阻 力矩与转动角速度成正比 (k为正常数)。 (1)它的角速度从变为所需时间是 [ ] (A);(B);(C);(D)。 (2)在上述过程中阻力矩所做的功为 [ ] (A);(B);(C); (D) 。 答案:C;B。 解:已知,, (1),, ,,所以 (2)
4.如图所示,对完全相同的两定滑轮(半径R,转动惯量J均相同),若分别用F(N)的力和加重物重力(N) 时,所产生的角加速度分别为和,则 [ ] (A);(B); (C);(D)不能确定。 答案:A 解:根据转动定律,有, 依受力图,有, 所以,。 5.对一绕固定水平轴O匀速转动的转盘,沿图示的同一水平直线从相反方向射入两颗质量相同、速率相等的子弹,并停留在盘中,则子弹射入后转盘的角速度应 [ ] (A)增大;(B)减小;(C)不变;(D)无法确定。 答案:B 解: , 所以 二、填空题 1.半径为的飞轮,初角速度,角加速度,若初始时刻角位移为零,则在时角位移再次为零,而此时边缘上点的线速度为 。 答案:;。 解:已知,,,。 因,为匀变速,所以有。 令,即得,由此得 ,所以 2.一根质量为m、长度为L的匀质细直棒,平放在水平桌面上。若它与桌面间的滑动摩擦系数为,在时,使该棒绕过其一端的竖直轴在水平桌面上旋转,其初始角速度为0,则棒停止转动所需时间为 。 答案:
有限元分析基础
有限元分析基础 第一章有限元法概述 在机械设计中,人们常常运用材料力学、结构力学等理论知识分析机械零构件的强度、刚度和稳定性问题。但对一些复杂的零构件,这种分析常常就必须对其受力状态和边界条件进行简化。否则力学分析将无法进行。但这种简化的处理常常导致计算结果与实际相差甚远,有时甚至失去了分析的意义。所以过去设计经验和类比占有较大比重。因为这个原因,人们也常常在设计中选择较大的安全系数。如此也就造成所设计的机械结构整体尺寸和重量偏大,而局部薄弱环节强度和刚度又不足的设计缺陷。 近年来,数值计算机在工程分析上的成功运用,产生了一门全新、高效的工程计算分析学科——有限元分析方法。该方法彻底改变了传统工程分析中的做法。使计算精度和计算领域大大改善。 §1.1 有限元方法的发展历史、现状和将来 一,历史 有限元法的起源应追溯到上世纪40年代(20世纪40年代)。1943年R.Courant从数学的角度提出了有限元法的基本观点。50年代中期在对飞机结构的分析中,诞生了结构分析的矩阵方法。1960年R.W.Clough在分析弹性力学平面问题时引入了“Finite Element Method”这一术语,从而标志着有限元法的思想在力学分析中的广泛推广。 60、70年代计算机技术的发展,极大地促进了有限元法的发展。具体表现在: 1)由弹性力学的平面问题扩展到空间、板壳问题。 2)由静力平衡问题——稳定性和动力学分析问题。 3)由弹性问题——弹塑性、粘弹性等问题。 二,现状 现在有限元分析法的应用领域已经由开始时的固体力学,扩展到流体力学、传热学和电磁力学等多个传统的领域。已经形成了一种非常成熟的数值分析计算方法。大型的商业化有限元分析软件也是层出不穷,如: SAP系列的代表SAP2000(Structure Analysis Program) 美国安世软件公司的ANSYS大型综合有限元分析软件 美国航天航空局的NASTRAN系列软件 除此以外,还有MASTER、ALGO、ABIQUES、ADINA、COSMOS等。 三,将来 有限元的发展方向最终将和CAD的发展相结合。运用“四个化”可以概括其今后的发展趋势。那就是:可视化、集成化、自动化和网络化。 §1.2 有限元法的特点 机械零构件的受力分析方法总体说来分为解析法和数值法两大类。如大家学过的材料力学、结构力学等就是经典的解析力学分析方法。在这些解析力学方法中,弹性力学的分析方法在数学理论上是最为严谨的一种分析方法。 其解题思路是:从静力、几何和物理三个方面综合考虑,建立描述弹性体的平衡、应力、应变和位移三者之间的微分方程,然后考虑边界条件,从而求出微分方程的解析解。其最大的有点就是,严密精确。缺点就是微分方程的求解困难,很多情况下,无法求解。 数值方法是一种近似的计算方法。具体又分为“有限差分法”和“有限元法”。 “有限差分法”是将得到的微分方程离散成近似的差分方程。通过对一系列离散的差分