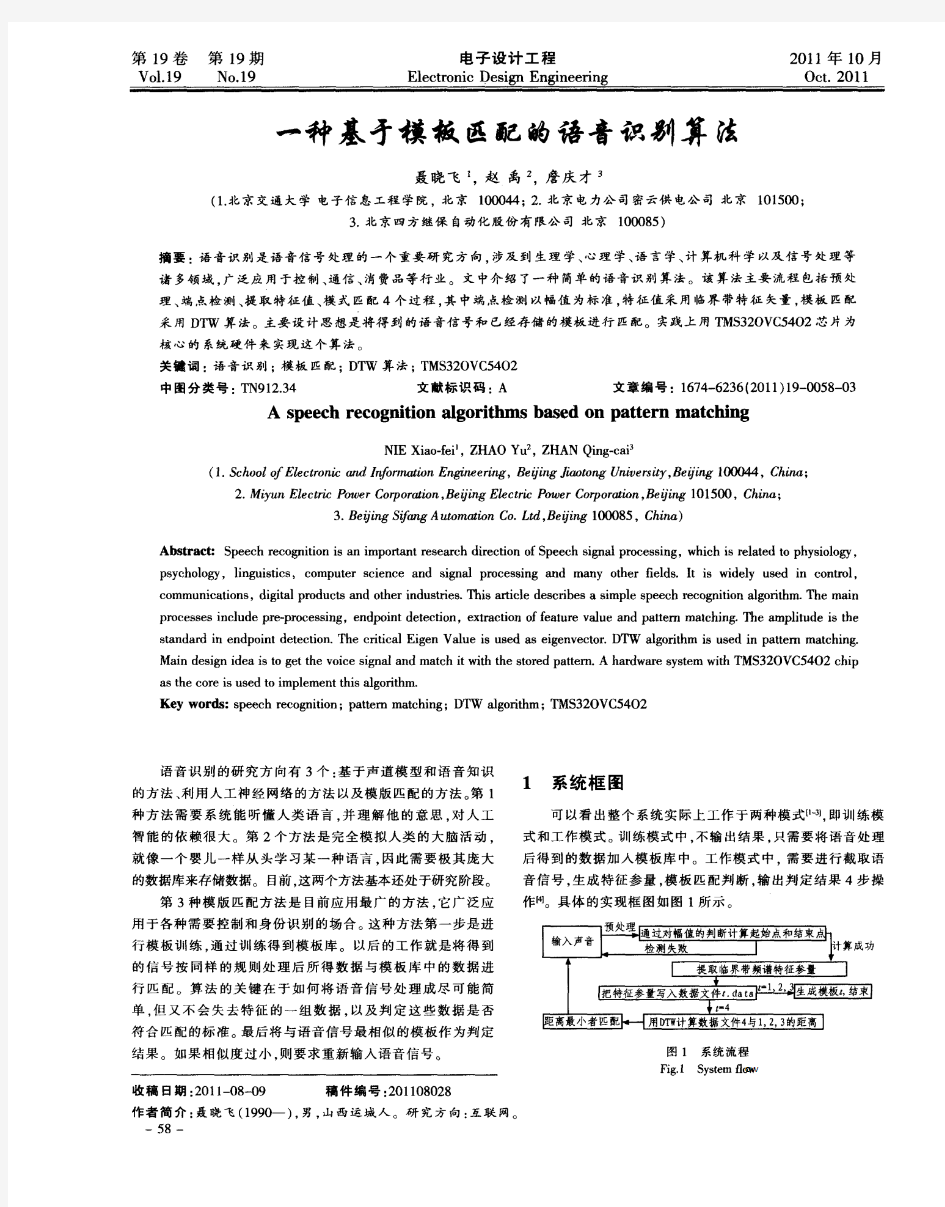
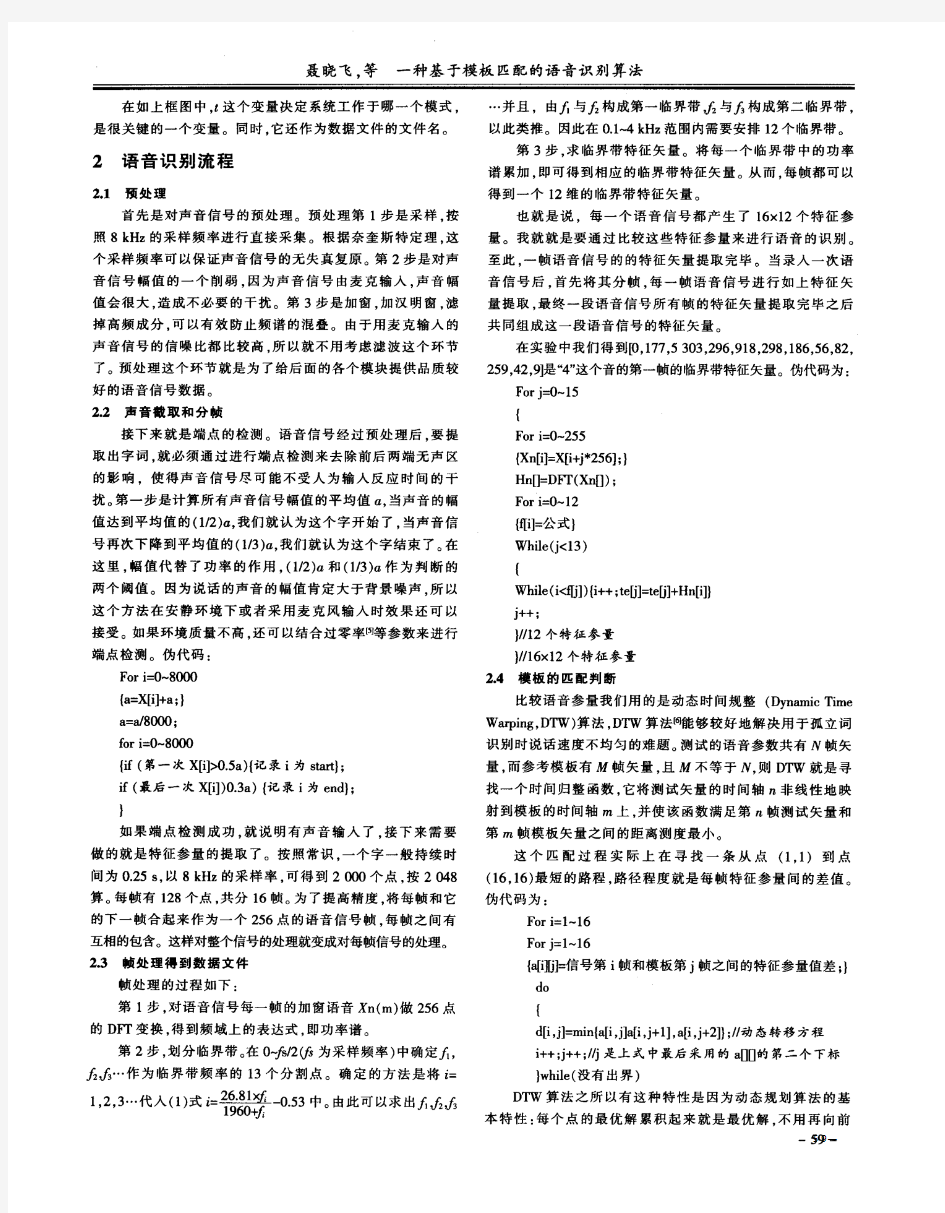
一种基于模板匹配的语音识别算法
Halcon中模板匹配方法的总结归纳
Halcon中模板匹配方法的总结归纳 基于组件的模板匹配: 应用场合:组件匹配是形状匹配的扩展,但不支持大小缩放匹配,一般用于多个对象(工件)定位的场合。 算法步骤: 1.获取组件模型里的初始控件gen_initial_components() 参数: ModelImage [Input] 初始组件的图片 InitialComponents [Output] 初始组件的轮廓区域 ContrastLow [Input] 对比度下限 ContrastHigh [Input] 对比度上限 MinSize [Input] 初始组件的最小尺寸 Mode[Input] 自动分段的类型 GenericName [Input] 可选控制参数的名称 GenericValue [Input] 可选控制参数的值 2.根据图像模型,初始组件,训练图片来训练组件和组件相互关系train_model_components() 3.创建组件模型create_trained_component_model() 4.寻找组件模型find_component_model() 5.释放组件模型clear_component_model() 基于形状的模板匹配: 应用场合:定位对象内部的灰度值可以有变化,但对象轮廓一定要清晰平滑。 1.创建形状模型:create_shape_model() 2.寻找形状模型:find_shpae_model() 3.释放形状模型:clear_shape_model() 基于灰度的模板匹配: 应用场合:定位对象内部的灰度值没有大的变化,没有缺失部分,没有干扰图像和噪声的场合。 1.创建模板:create_template() 2.寻找模板:best_match() 3.释放模板:clear_template() 基于互相关匹配: 应用场合:搜索对象有轻微的变形,大量的纹理,图像模糊等场合,速度快,精度低。 1.创建模板:create_ncc_model() 2.寻找模板:find_ncc_model() 3.释放模板:clear_ncc_model() 基于变形匹配: 应用场合:搜索对象有轻微的变形。 1.创建模板:create_local_deformable_model() 2.寻找模板:find_local_deformable_model() 3.释放模板:clear_deformable_model()
基于模板匹配算法的数字识别讲解
中南民族大学 毕业论文(设计) 学院: 计算机科学学院 专业: 软件工程年级:2009 题目: 基于模板匹配算法的数字识别学生姓名: 李成学号:09065093指导教师姓名: 李波职称: 讲师 2013年5月
中南民族大学本科毕业论文(设计)原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。 作者签名:2013年月日
摘要 (1) Abstract (1) 1 绪论 (2) 1.1 研究目的和意义 (2) 1.2 国内外研究现状 (2) 2 本文基本理论介绍 (3) 2.1 位图格式介绍 (3) 2.2 二值化 (3) 2.3 去噪 (3) 2.4 细化 (4) 2.5 提取骨架 (4) 3 图像的预处理 (5) 3.1 位图读取 (5) 3.2 二值化及去噪声 (5) 3.3 提取骨架 (6) 4 基于模板匹配的字符识别 (8) 4.1 样本训练 (8) 4.2 特征提取 (8) 4.3 模板匹配 (9) 4.4 加权特征模板匹配 (10) 4.5 实验流程与结果 (10) 5 结论 (16) 5.1 小结 (16) 5.2 不足 (16) 6 参考文献 (17)
基于模板匹配算法的数字识别 摘要 数字识别已经广泛的应用到日常生活中,典型的数字自动识别系统由图像采集、预处理、二值化、字符定位、字符分割和字符识别等几部分组成, 这些过程存在着紧密的联系。传统的模板匹配算法因为图像在预处理之后可能仍然存在较大的干扰,数字笔画粗细不均匀,有较大的噪声,识别效率不高。本文采的主要思想就是对字符进行分类,之后对字符进行细化,提取细化后字符的特征矢量,与模板的特征矢量进行加权匹配,误差最小的作为识别结果。本文在模板匹配法的基础上, 采用了特征值加权模板匹配法, 并且改进了匹配系数的求法。应用该法取得了满意的效果, 提高了识别率。 关键词:模板匹配;数字识别;特征值加权;字符识别; Template matching algorithm-based digital identification Abstract Digital identification has been widely applied to daily life, the typical digital automatic identification system by the image acquisition, pre-processing, binarization, character positioning, character segmentation and character recognition several parts, there is a close link these processes. Traditional template matching algorithm because the image may still exist after pre-greater interference, digital strokes uneven thickness, the noise, the identification efficiency is not high. Adopted herein main idea is to classify the character after character refinement, the characters feature vector extraction refinement, and the template feature vector is weighted matching, the minimum error as a recognition result. Template matching method based on feature weighted template matching method, and improve the matching coefficient method. The application of the method to obtain satisfactory results, to improve the recognition rate. Key words:Template matching; digital identification; characteristic value weighted; character recognition;
基于特征的图像匹配算法毕业设计论文(含源代码)
诚信声明 本人声明: 我所呈交的本科毕业设计论文是本人在导师指导下进行的研究工作及取得的研究成果。尽我所知,除了文中特别加以标注和致谢中所罗列的内容以外,论文中不包含其他人已经发表或撰写过的研究成果。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。本人完全意识到本声明的法律结果由本人承担。 申请学位论文与资料若有不实之处,本人承担一切相关责任。 本人签名:日期:2010 年05 月20日
毕业设计(论文)任务书 设计(论文)题目: 学院:专业:班级: 学生指导教师(含职称):专业负责人: 1.设计(论文)的主要任务及目标 (1) 了解图象匹配技术的发展和应用情况,尤其是基于特征的图象匹配技术的发展和应用。 (2) 学习并掌握图像匹配方法,按要求完成算法 2.设计(论文)的基本要求和内容 (1)查阅相关中、英文文献,完成5000汉字的与设计内容有关的英文资料的翻译。(2)查阅15篇以上参考文献,其中至少5篇为外文文献,对目前国内外图象匹配技术的发展和应用进行全面综述。 (3)学习图象匹配算法,尤其是基于特征的图象匹配算法。 (4)实现并分析至少两种基于特征的图象匹配算法,并分析算法性能。 3.主要参考文献 [1]谭磊, 张桦, 薛彦斌.一种基于特征点的图像匹配算法[J].天津理工大学报,2006, 22(6),66-69. [2]甘进,王晓丹,权文.基于特征点的快速匹配算法[J].电光与控制,2009,16(2), 65-66. [3]王军,张明柱.图像匹配算法的研究进展[J].大气与环境光学学报,2007,2(1), 12-15.
多关键词模糊匹配算法名词解释
编辑距离:是指两个字串之间,由一个转成另一个所需的最少编辑操作次数;俄罗斯科学家Vladimir Levenshtein在1965年提出这个概念;编辑距离越小的两个字符串越相似,当编辑距离为0时,两字符串相等。 距离:两个子串之间的“差异”叫做距离。 海明距离:相同位相同值的个数。 Hash函数:就是把任意长度的输入(又叫做预映射,pre-image),通过散列算法,变换成固定长度的输出,该输出就是散列值。这种转换是一种压缩映射,也就是,散列值的空间通常远小于输入的空间,不同的输入可能会散列成相同的输出,所以不可能从散列值来确定唯一的输入值。简单的说就是一种将任意长度的消息压缩到某一固定长度的消息摘要的函数。 Simhash算法:分为5个步骤:分词(带权重w)、hash(得hash值)、加权(hash值*w)、合并(多关键词)、降维(海明距离)。 算法伪代码: 1,将一个f维的向量V初始化为0;f位的二进制数S初始化为0; 2,对每一个特征:用传统的hash算法对该特征产生一个f位的签名b。对i=1到f: 如果b的第i位为1,则V的第i个元素加上该特征的权重; 否则,V的第i个元素减去该特征的权重。 3,如果V的第i个元素大于0,则S的第i位为1,否则为0; 4,输出S作为签名。 通配符:一种特殊语句,主要有星号(*)和问号(?),用来模糊搜索文件。当查找文件夹时,可以使用它来代替一个或多个真正字符;当不知道真正字符或者懒得输入完整名字时,常常使用通配符代替一个或多个真正的字符。 TF词频(Term Frequency):是指某一个给定的词语在该文件中出现的次数。一种统计方法,
基于HALCON的模板匹配方法总结.
基于HALCON的模板匹配方法总结 基于HALCON的模板匹配方法总结 HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果。在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。 1. Shape-Based matching的基本流程 HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。基本流程是这样的,如下所示: ⑴ 首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用 area_center()找到这个矩形的中心;
⑵ 然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等; ⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。对特别大的模板,用Optimization来减少模板点的数量是很有用的;MinConstrast将模板从图像的噪声中分离出来,如果灰度值的波动范围是10,则MinConstrast应当设为10;Metric参数决定模板识别的条件,如果设为’use_polarity’,则图像中的物体和模板必须有相同的对比度;创建好模板后,这时还需要监视模板,用inspect_shape_model()来完成,它检查参数的适用性,还能帮助找到合适的参数;另外,还需要获得这个模板的轮廓,用于后面的匹配,get_shape_model_contours()则会很容易的帮我们找到模板的轮廓; ⑷ 创建好模板后,就可以打开另一幅图像,来进行模板匹配了。这个过程也就是在新图像中寻找与模板匹配的图像部分,这部分的工作就由函数 find_shape_model()来承担了,它也拥有许多的参数,这些参数都影响着寻找模板的速度和精度。这个的功能就是在一幅图中找出最佳匹配的模板,返回一个模板实例的长、宽和旋转角度。其中参数SubPixel决定是否精确到亚像素级,设为’interpolation’,则会精确到,这个模式不会占用太多时间,若需要更精确,则可设为’least_square’,’lease_square_high’,但这样会增加额外的时间,因此,这需要在时间和精度上作个折中,需要和实际联系起来。比较重要的两个参数是MinSocre和Greediness,前一个用来分析模板的旋转对称和它们之间的相似度,值越大,则越相似,后一个是搜索贪婪度,这个值在很大程度上影响着搜索速度,若为0,则为启发式搜索,很耗时,若为1,则为不安全搜索,但最快。在大多数情况下,在能够匹配的情况下,尽可能的增大其值。 ⑸ 找到之后,还需要对其进行转化,使之能够显示,这两个函数 vector_angle_to_rigid()和affine_trans_contour_xld()在这里就起这个作用。前一个是从一个点和角度计算一个刚体仿射变换,这个函数从匹配函数的
图像处理技术--模板匹配
图像处理技术——模板匹配算法 左力2002.3. 认知是一个把未知与已知联系起来的过程。对一个复杂的视觉系统来说,它的内部常同时存在着多种输入和其它知识共存的表达形式。感知是把视觉输入与事前已有表达结合的过程,而识别也需要建立或发现各种内部表达式之间的联系。 匹配就是建立这些联系的技术和过程。建立联系的目的是为了用已知解释未知。 章毓晋《图像工程下册》P.163 一.模板匹配的基本概念 模板就是一幅已知的小图像。模板匹配就是在一幅大图像中搜寻目标,已知该图中有要找的目标,且该目标同模板有相同的尺寸、方向和图像,通过一定的算法可以在图中找到目标,确定其坐标位置。 以8位图像(其1个像素由1个字节描述)为例,模板T( m ? n个像素)叠放在被搜索图S( W ? H个像素)上平移,模板覆盖被搜索图的那块区域叫子图Sij。i,j为子图左上角在被搜索图S上的坐标。搜索范围是: 1 ≤ i ≤ W – M 1 ≤ j ≤ H – N 通过比较T和Sij的相似性,完成模板匹配过程。 注意:图像的数据是从下到上、从左到右排列的。 可以用下式衡量T和Sij相似性: ∑∑ = =- = N n ij M m n m T n m S j i D 12 1 )] , ( ) , ( [ ) ,(被搜索图 S 模板 T m i {
∑∑ ∑∑ ∑∑ ======+?-=N n M m N n ij M m N n ij M m n m T n m T n m S n m S 1 2 1 1 1 1 2 1 )] ,([),(),(2)],([ 上式的第一项为子图的能量,第三项为模板的能量,都与模板匹配无关。第二项是模板和子图的互相关,随( i, j )而改变。当模板和子图匹配时,该项有极大值。将其归一化,得模板匹配的相关系数: ∑∑∑∑∑∑======?= N n M m N n ij M m N n ij M m n m T n m S n m T n m S j i R 1 2 1 1 2 1 1 1 )] ,([)],([) ,(),(),( 当模板和子图完全一样时,相关系数R( i, j ) = 1。在被搜索图S 中完成全部搜索后,找出R 的最大值Rmax( im, jm ),其对应的子图Simjm 即为匹配目标。显然,用这种公式做图像匹配计算量大、速度较慢。 另一种算法是衡量T 和Sij 的误差,其公式为: ∑∑ ==-=N n ij M m n m T n m S j i E 1 1 |),(),(|),( E( i, j )为最小值处即为匹配目标。为提高计算速度,取一个误差阈值E 0,当E( i, j )> E 0时就停止该点的计算,继续下一点计算。 试验结果如下: 注:以上试验是在赛扬600 PC 机上用VC6.0进行的。 结果表明:被搜索图越大,匹配速度越慢;模板越小,匹配速度越快。误差法速度较快,阈值的大小对匹配速度影响大,和模板的尺寸有关。 二.改进模板匹配算法 我在误差算法的基础上设计了二次匹配误差算法: 第一次匹配是粗略匹配。取模板的隔行隔列数据,即四分之一的模板数据,在被搜索图上进行隔行隔列扫描匹配,即在原图的四分之一范围内匹配。由于数据量大幅度减少,匹配速度显著提高。 为了合理的给出一个误差阈值E0,我设计了一个确定误差阈值E0的准则: E 0 = e 0 * (m+1)/2 * (n+1)/2
关于快速高效的模式匹配算法的剖析与改进
关于快速高效的模式匹配算法的剖析与改进 摘要:模式匹配算法是现代化网络入侵检测中的关键环节,本文主要介绍了几种常用的模式匹配算法,并在此基础上,提出一种更快捷、更高效的改进方法,以提高模式匹配的效率与质量,确保网络安全。 关键词:模式匹配入侵检测改进 随着我国计算机与网络技术的飞速发展,网络应用已涉及到人们生产、生活的各个领域,其重要性日益凸显。随之而来的网络攻击问题也备受关注,给网络安全性带来挑战。传统的网络防御模式,主要采取身份认证、防火墙、数据加密等技术,但是与当前网络发展不适应。在此背景下,入侵检测技术营运而生,并建立在模式匹配基础上,确保检测的快捷性、准确性,应用越来越广泛。 1、模式匹配原理概述 模式匹配是入侵检测领域的重要概念,源自入侵信号的层次性。结合网络入侵检测的底层审计事件,从中提取更高层次的内容。通过高层事件形成的入侵信号,遵循一定的结构关系,将入侵信号的抽象层次进行具体划分。入侵领域大师kumar将这种入侵信号划分为四大层次,并将每一个层次与匹配模式相对应。以下将分别对四大层次进行分析: (1)存在。只要存在审计事项,就可以证明入侵行为的发生,并深层次挖掘入侵企图。存在主要对应的匹配模式就是“存在模式”。可以说,存在模式就是在固定的时间内,检查系统中的特定状态,
同时判断系统状态。 (2)序列。一些入侵的发生,是遵循一定的顺序,而组成的各种行为。具体表现在一组事件的秩序上。序列对应的是“序列模式”,在应用序列模式检测入侵时,主要关注间隔的时间与持续的时间。 (3)规则。规则表示的是一种可以扩展的表达方式,主要通过and 逻辑表达来连接一系列的描述事件规则。一般适用于这种模式的攻击信号由相关活动组成,这些活动之间往往不存在事件的顺序关系。 (4)其他。其他模式是不包含前面几种方法的攻击,在具体应用过程中,难以与其他入侵信号进行模式匹配,大多为部分实现方式。 2、几种常用的模式匹配算法 2.1 ac算法 ac算法(aho-corasick)是一种可以同时搜索若干个模式的匹配算法,最早时期在图书馆书目查询系统中应用,效果良好。通过使用ac算法,实现了利用有限状态自动机结构对所有字符串的接收过程。自动机具有结构性特征,且每一个前缀都利用唯一状态显示,甚至可同时应用于多个模式的前缀中。如果文本中的某一个字符不属于模式中预期的下一个字符范围内,或者可能出现错误链接的指向状态等,那么最长模式的前缀同时也可作为当前状态相对应的后缀。ac算法的复杂性在于o(n),预处理阶段的复杂性则在于o(m)。在采取ac算法的有限状态自动机中,应该在每一个字符的模式串中分别建立节点,提高该算法的使用效率与质量。目前,应用有限
百度搜索关键词逻辑算法
搜索关键词提炼 选择搜索关键词的原则是,首先确定你所要达到的目标,在脑子里要形成一个比较清晰概念,即我要找的到底是什么?是资料性的文档?还是某种产品或服务?然后再分析这些信息都有些什么共性,以及区别于其他同类信息的特性,最后从这些方向性的概念中提炼出此类信息最具代表性的关键词。如果这一步做好了,往往就能迅速的定位你要找的东西,而且多数时候你根本不需要用到其他更复杂的搜索技巧。 细化搜索条件 你给出的搜索条件越具体,搜索引擎返回的结果也会越精确。比方说你想查找有关电脑冒险游戏方面的资料,输入game是无济于事的。computer game范围就小一些,当然最好是敲入computer adventure game,返回的结果会精确得多。此外一些功能词汇和太常用的名词,如对英文中的“and”、“how”、“what”、“web”、“homepage”和中文中的“的”、“地”、“和”等等搜索引擎是不支持的。这些词被称为停用词(Stop Words)或过滤词(Filter Words),在搜索时这些词都将被搜索引擎忽略。 用好搜索逻辑命令 搜索引擎基本上都支持附加逻辑命令查询,常用的是“+”号和“-”号,或与之相对应的布尔(Boolean)逻辑命令AND、OR和NOT。用好这些命令符号可以大幅提高我们的搜索精度。 精确匹配搜索 除利用前面提到的逻辑命令来缩小查询范围外,还可使用""引号(注意为英文字符。虽然现在一些搜索引擎已支持中文标点符号,但顾及到其他引擎,最好养成使用英文字符的习惯)来进行精确匹配查询(也称短语搜索)。 特殊搜索命令 标题搜索多数搜索引擎都支持针对网页标题的搜索,命令是“title:”,在进行标题搜索时,前面提到的逻辑符号和精确匹配原则同样适用。网站搜索此外我们还可以针对网站进行搜索,命令是“site:”(Google)、“host:”(AltaVista)、“url:”(Infoseek)或“domain:”(HotBot)。链接搜索在Google和AltaVista中,用户均可通过“link:”命令来查找某网站的外部导入链接(inbound links)。其他一些引擎也有同样的功能,只不过命令格式稍有区别。你可以用这个命令来查看是谁以及有多少网站与你做了链接。 1、简单查询 在搜索引擎中输入关键词,然后点击“搜索”就行了,系统很快会返回查询结果,这是最简单的查询方法,使用方便,但是查询的结果却不准确,可能包含着许多无用的信息。 2、使用双引号用(" ") 给要查询的关键词加上双引号(半角,以下要加的其它符号同此),可以实现精确的查询,这种方法要求查询结果要精确匹配,不包括演变形式。例如在搜索引擎的文字框中输入“提供电商平台建设的北京方寸无限网络科技有限公司”,它就会返回网页中有“电商平台建设”这个关键字的网址,而不会返回诸如“有限公司”之类网页。 3、使用加号(+) 在关键词的前面使用加号,也就等于告诉搜索引擎该单词必须出现在搜索结果中的网页上,例如,在搜索引擎中输入“+电脑+电话+传真”就表示要查找的内容必须要同时包含“电脑、电话、传真”这三个关键词。 4、使用减号(-) 在关键词的前面使用减号,也就意味着在查询结果中不能出现该关键词,例如,在搜索引擎中输入“电视台-中央电视台”,它就表示最后的查询结果中一定不包含“中央电视台”。5、使用通配符(*和?)
基于HALCON的模板匹配方法总结--蓝云杨的机器视觉之路
基于HALCON的模板匹配方法总结--蓝云杨的机器视觉之路 蓝云杨的机器视觉之路https://www.360docs.net/doc/f112384492.html,/blog/user1/8/index.html 首页相册 标签机器视觉(64)图像处理(11)视频压缩(12)小波分析(5)三峡(3)生活随笔(32)HALCON(7)编程感悟(18)哲思慧语(32) 基于HALCON的模板匹配方法总结 2006-8-16 16:34:00 4 推荐很早就想总结一下前段时间学习HALCON的心得,但由于其他的事情总是抽不出时间。去年有过一段时间的集中学习,做了许多的练习和实验,并对基于HDevelop 的形状匹配算法的参数优化进行了研究,写了一篇《基于HDevelop的形状匹配算法参数的优化研究》文章,总结了在形状匹配过程中哪些参数影响到模板的搜索和匹配,又如何来协调这些参数来加快匹配过程,提高匹配的精度,这篇paper放到了中国论文在线了,需要可以去下载。 德国MVTec公司开发的HALCON机器视觉开发软件,提供了许多的功能,在这里我主要学习和研究了其中的形状匹配的算法和流程。HDevelop开发环境中提供的匹配的方法主要有三种,即Component-Based、Gray-Value-Based、Shape-Based,分别是基于组件(或成分、元素)的匹配,基于灰度值的匹配和基于形状的匹配。这三种匹配的方法各具特点,分别适用于不同的图像特征,但都有创建模板和寻找模板的相同过程。这三种方法里面,我主要就第三种-基于形状的匹配,做了许多的实验,因此也做了基于形状匹配的物体识别,基于形状匹配的视频对象分割和基于形状匹配的视频对象跟踪这些研究,从中取得较好的效果,简化了用其他工具,比如VC++来开发的过程。在VC下往往针对不同的图像格式,就会弄的很头疼,更不用说编写图像特征提取、模板建立和搜寻模板的代码呢,我想其中间过程会很复杂,效果也不一定会显著。下面我就具体地谈谈基于HALCON的形状匹配算法的研究和心得总结。 1. Shape-Based matching的基本流程 HALCON提供的基于形状匹配的算法主要是针对感兴趣的小区域来建立模板,对整个图像建立模板也可以,但这样除非是对象在整个图像中所占比例很大,比如像视频会议中人体上半身这样的图像,我在后面的视频对象跟踪实验中就是针对整个图像的,这往往也是要牺牲匹配速度的,这个后面再讲。基本流程是这样的,如下所示: ⑴ 首先确定出ROI的矩形区域,这里只需要确定矩形的左上点和右下点的坐标即可,gen_rectangle1()这个函数就会帮助你生成一个矩形,利用area_center()找到这个矩形的中心; ⑵ 然后需要从图像中获取这个矩形区域的图像,reduce_domain()会得到这个ROI;这之后就可以对这个矩形建立模板,而在建立模板之前,可以先对这个区域进行一些处理,方便以后的建模,比如阈值分割,数学形态学的一些处理等等; ⑶ 接下来就可以利用create_shape_model()来创建模板了,这个函数有许多参数,其中金字塔的级数由Numlevels指定,值越大则找到物体的时间越少,AngleStart 和AngleExtent决定可能的旋转范围,AngleStep指定角度范围搜索的步长;这里需要提醒的是,在任何情况下,模板应适合主内存,搜索时间会缩短。对特别大的模板,用Optimization
模板匹配
halcon模板匹配 * 在一个图片中获取ROI并在此图片中匹配 dev_close_window () dev_open_window (0, 0, 600, 600, 'black', WindowHandle) * 窗口语句 read_image(Image,'L:/Halcon test/mk2.jpg') *read_image(Image,'L:/Halcon test/mk3.jpg') *read_image(Image,'L:/Halcon test/mk4.jpg') * 这里有4张图片,每一张都说明一个小问题,附图分析。 gen_rectangle1 (ROI1, 57.8333, 49.5, 181.167, 342.833) * 画一个矩形选择ROI,矩形在左上角,覆盖一个完整的,无变形规定尺寸的商标,作为模板。 reduce_domain(Image,ROI1,ImageReduced1) * 大图和这个矩形的ROI相减就会得到一个左上角的商标的图案作为模板,命名ImageReduced。 create_shape_model(ImageReduced1,0,0,rad(360),0,'no_pregeneration','use_polarity',40,10,ModelID1) * 创建一个比例不变(1:1)的匹配的轮廓模型。具体参数下个帖子说明,也可见[Halcon算子学习交流区] Halcon模版匹配算子解析。 find_shape_model(Image,ModelID1,0,rad(360),0.7,13,0.5,'interpolation',0,0.9,Row,Column,Angle,Score) * 寻找与模板的大小尺寸必须是一比一匹配的,只是角度的不同而已,若大小发生变化,则不能匹配 get_shape_model_contours(ModelContours1,ModelID1,1) * 在大图中获取匹配。 for i := 0 to |Row|-1 by 1 vector_angle_to_rigid(0,0,0,Row【i】,Column【i】,Angle【i】,HomMat2D) affine_trans_contour_xld(ModelContours2,ContoursAffinTrans,HomMat2D) endfor * 获取匹配。 disp_message (WindowHandle, '总共匹配了' + |Row| + '个商标', 'window', 12, 12, 'red', 'true') * 输出数量统计。 clear_shape_model(ModelID1) stop()
模板匹配
图像模式识别中模板匹配的基本概念以及基本算法 认知是一个把未知与已知联系起来的过程。对一个复杂的视觉系统来说,他的内部常同时存在着多种输入和其他知识共存的表达形式。感知是把视觉输入与事先已有表达结合的过程,而识别与需要建立或发现各种内部表达式之间的联系。匹配就是建立这些联系的技术和过程。建立联系的目的是为了用已知解释未知。(摘自章毓晋《图像工程》) 1、模板匹配法: 在机器识别事物的过程中,常常需要把不同传感器或同一传感器在不同时间、不同成像条件下对同一景象获取的两幅或多幅图像在空间上对准,或根据已知模式到另一幅图像中寻找相应的模式,这就叫匹配。在遥感图像处理中需要把不同波段传感器对同一景物的多光谱图像按照像点对应套准,然后根据像点的性质进行分类。如果利用在不同时间对同一地面拍摄的两幅照片,经套准后找到其中特征有了变化的像点,就可以用来分析图中那些部分发生了变化;而利用放在一定间距处的两只传感器对同一物体拍摄得到两幅图片,找出对应点后可计算出物体离开摄像机的距离,即深度信息。 一般的图像匹配技术是利用已知的模板利用某种算法对识别图像进行匹配计算获得图像中是否含有该模板的信息和坐标; 2、基本算法: 我们采用以下的算式来衡量模板T(m,n)与所覆盖的子图Sij(i,j)的关系,已知原始图像S(W,H),如图所示: 利用以下公式衡量它们的相似性: 上述公式中第一项为子图的能量,第三项为模板的能量,都和模板匹配无关。第二项是模板和子图的互为相关,随(i,j)而改变。当模板和子图匹配时,该项由
最大值。在将其归一化后,得到模板匹配的相关系数: 当模板和子图完全一样时,相关系数R(i,j) = 1。在被搜索图S中完成全部搜索后,找出R的最大值Rmax(im,jm),其对应的子图Simjm即位匹配目标。显然,用这种公式做图像匹配计算量大、速度慢。我们可以使用另外一种算法来衡量T和Sij的误差,其公式为: 计算两个图像的向量误差,可以增加计算速度,根据不同的匹配方向选取一个误差阀值E0,当E(i,j)>E0时就停止该点的计算,继续下一点的计算。 最终的实验证明,被搜索的图像越大,匹配的速度越慢;模板越小,匹配的速度越快;阀值的大小对匹配速度影响大; 3、改进的模板匹配算法 将一次的模板匹配过程更改为两次匹配; 第一次匹配为粗略匹配。取模板的隔行隔列数据,即1/4的模板数据,在被搜索土上进行隔行隔列匹配,即在原图的1/4范围内匹配。由于数据量大幅减少,匹配速度显著提高。同时需要设计一个合理的误差阀值E0: E0 = e0 * (m + 1) / 2 * (n + 1) / 2 式中:e0为各点平均的最大误差,一般取40~50即可; m,n为模板的长宽; 第二次匹配是精确匹配。在第一次误差最小点(imin, jmin)的邻域内,即在对角点为(imin -1, jmin -1), (Imin + 1, jmin + 1)的矩形内,进行搜索匹配,得到最后结果。
基於HALCON的模板匹配方法总结
基於HALCON的模板匹配方法總結 基於HALCON的模板匹配方法總結 很早就想總結一下前段時間學習HALCON的心得,但由於其他的事情總是抽不出時間。去年有過一段時間的集中學習,做了許多的練習和實驗,並對基於HDevelop的形狀匹配算法的參數優化進行了研究,寫了一篇《基於HDevelop的形狀匹配算法參數的優化研究》文章,總結了在形狀匹配過程中哪些參數影響到模板的搜索和匹配,又如何來協調這些參數來加快匹配過程,提高匹配的精度,這篇paper放到了中國論文在線了,需要可以去下載。 德國MVTec公司開發的HALCON機器視覺開發軟件,提供了許多的功能,在這裡我主要學習和研究了其中的形狀匹配的算法和流程。HDevelop開發環境中提供的匹配的方法主要有三種,即Component-Based、Gray-Value-Based、Shape-Based,分別是基於組件(或成分、元素)的匹配,基於灰度值的匹配和基於形狀的匹配。這三種匹配的方法各具特點,分別適用於不同的圖像特征,但都有創建模板和尋找模板的相同過程。這三種方法裡面,我主要就第三種-基於形狀的匹配,做了許多的實驗,因此也做了基於形狀匹配的物體識別,基於形狀匹配的視頻對象分割和基於形狀匹配的視頻對象跟蹤這些研究,從中取得較好的效果,簡化了用其他工具,比如VC++來開發的過程。在VC下往往針對不同的圖像格式,就會弄的很頭疼,更不用說編寫圖像特征提取、模板建立和搜尋模板的代碼呢,我想其中間過程會很復雜,效果也不一定會顯著。下面我就具體地談談基於HALCON的形狀匹配算法的研究和心得總結。 1. Shape-Based matching的基本流程 HALCON提供的基於形狀匹配的算法主要是針對感興趣的小區域來建立模板,對整個圖像建立模板也可以,但這樣除非是對象在整個圖像中所佔比例很大,比如像視頻會議中人體上半身這樣的圖像,我在後面的視頻對象跟蹤實驗中就是針對整個圖像的,這往往也是要犧牲匹配速度的,這個後面再講。基本流程是這樣的,如下所示: ⑴首先確定出ROI的矩形區域,這裡只需要確定矩形的左上點和右下點的坐標即可, gen_rectangle1()這個函數就會幫助你生成一個矩形,利用area_center()找到這個矩形的中心; ⑵然後需要從圖像中獲取這個矩形區域的圖像,reduce_domain()會得到這個ROI;這之後就可以對這個矩形建立模板,而在建立模板之前,可以先對這個區域進行一些處理,方便以後的建模,比如閾值分割,數學形態學的一些處理等等; ⑶接下來就可以利用create_shape_model()來創建模板了,這個函數有許多參數,其中金字塔的級數由Numlevels指定,值越大則找到物體的時間越少,AngleStart和AngleExtent 決定可能的旋轉范圍,AngleStep指定角度范圍搜索的步長;這裡需要提醒的是,在任何情
模板匹配详解
模板匹配? 目标? 在这节教程中您将学到: ?使用OpenCV函数matchTemplate在模 板块和输入图像之间寻找匹配,获得匹配结 果图像 ?使用OpenCV函数minMaxLoc在给定的 矩阵中寻找最大和最小值(包括它们的位 置). 原理? 什么是模板匹配?? 模板匹配是一项在一幅图像中寻找与另一幅模板图像最匹配(相似)部分的技术. ?我们需要2幅图像: 1. 原图像(I):在这幅图像里,我们希望 找到一块和模板匹配的区域 2. 模板(T):将和原图像比照的图像 块 我们的目标是检测最匹配的区域:
?为了确定匹配区域, 我们不得不滑动模板图像和原图像进行比较: ?通过滑动, 我们的意思是图像块一次移动一个像素(从左往右,从上往下). 在每一个位置, 都进行一次度量计算来表明它是“好” 或“坏” 地与那个位置匹配(或者说块图像和原图像的特定区域有多么相似). ?对于T覆盖在I上的每个位置,你把度量值保存到结果图像矩阵(R)中. 在R 中的每个位置都包含匹配度量值:
上图就是TM_CCORR_NORMED方法 处理后的结果图像R . 最白的位置代表最 高的匹配. 正如您所见, 红色椭圆框住的位 置很可能是结果图像矩阵中的最大数值, 所以这个区域(以这个点为顶点,长宽和模 板图像一样大小的矩阵) 被认为是匹配的. 实际上, 我们使用函数minMaxLoc来定 位在矩阵R中的最大值点(或者最小值, 根据函数输入的匹配参数) . 问得好. OpenCV通过函数matchTemplate实现了模板匹配算法. 可用的方法有6个: 1. 平方差匹配method=CV_TM_SQDIFF 这类方法利用平方差来进行匹配,最好匹配为0.匹配越差,匹配值越大. b. 标准平方差匹配 method=CV_TM_SQDIFF_NORMED
高效的多模式匹配算法
东方企业文化·百家论坛 2011年9月 163 高效的多模式匹配算法 马 力 (重庆青年职业技术学院,重庆,400712) 摘 要:本文提出一种新的多模式匹配算法,以提高匹配检测的执行速度和效率。该算法采用了基于集合的多模式匹配思想,重新构造了HASH 函数以便在处理大规模模式集时执行时间能比传统的匹配算法的执行时间要少。经过实验证明,运用该算法不仅具有时间复杂度较低的优点,且与传统算法相比具有更为优越的性能,同时在实际工作状态下的检测能力也更强大。 关键词:多模式匹配 HASH 函数 中图分类号:TP393 文献标识码:A 文章编号:1672—7355(2011)09—0163—01 一、算法描述 通常在自然文本中,经常会发生所谓的坏字符移动。此时会极大提高Boyer-Moore 算法的检测效率。但是当文本与多个模式进行匹配时,文本中的多数字符都可能与某些模式的最后一个字符相匹配(即匹配冲突),这时发生坏字符移动的可能性就非常小了。本文提出的算法解决了如何在上述情况下继续保持Boyer-Moore 算法的实质与效率的问题,采用散列(Hash )技术和高效过滤等方法,减小了匹配冲突对算法执行效率的影响。算法描述如下: 首先,算法需要计算出模式的最小长度,设其值为m ,为简化算法描述,假定所有模式均具有相同的长度,同时保证最小长度合理以免影响匹配效率。 假设P 为模式的集合,P={P 1P 2……P K },K=|P|,P 中所有模式的长度均为m 。T 为网络数据包,T=t 1t 2……t n (n ≧m )。 选取Q 为足够大空间的常数,定义长度为m 的支字符串R=r 1r 2……r m ,则构造出R 的Hash 函数:∑=?=m i i m i S r Q R Hash 1mod )(,其中S 为上文所提的模式的P 集合。 二、算法流程设计 1. 预处理阶段 首先需要对模式进行排序,形成有序模式链表;然后主要完成三张表(SHIFT 表、HASH 表和PREFIX 表)的创建。SHIFT 表主要用于确定扫描文本时可移动的字符数。根据SHIFT 表中的取值分为两种处理情况:SHIFT[i ]≠0:直接根据SHIFT[i ]中的取值,确定移动的字符数。SHIFT[i ]=0:即前面提到的匹配冲突。此时需要根据HASH 表和PREFIX 表确定匹配的候选模式并最终核实该模式。 (1)SHIFT 表的创建在此处起到与Boyer-Moore 算法中相同的移动指示作用,只不过移动字符的数目基于长度为B 的字符块。假设SHIFT 表中包含了每个大小为B 的字符串的入口,那么它的大小为|∑|B 。为了减少表存储空间,采用了散列函数,将每个长度为B 的字符串映像为一个索引SHIFT 表的整数。设X=x 1x 2……x b 为文本中的b 个字符串,并假设X 已经被映像为SHIFT 表中的一个入口,则过程SHIFT Table Set Value ()有以下两种情况: X 不属于substring (P ) :SHIFT[i]=m-B+I ; X 属于substring (P ) :SHIFT[i]=m-q ; (q 为P i 中X 发生匹配的最右端位置)。 SHIFT 表中的所有初始值均为m-B+1,考虑每个模式 P=P 1P 2……P K ,将每个大小为i j B j B j P p p p B )(21"+?+?的子 串映像到SHIFT 表中。 通常情况下,SHIFT 表项的取值总是大于0,因此能够成功地跳过文本块并继续扫描文本。但是当模式数量增多时,情况就完全不同了。当模式数量增多时,SHIFT 表项取值为0的概率也呈线性递增趋势,即发生匹配冲突的可能性越来越大。本文设计的该算法的核心思想就是采用散列技术来最小化需要处理模式的数目,避免与模式链表中的每个模式逐一进行匹配,同时结合PREFIX 表的过滤作用,加速搜索过程。 (2)HASH 表的创建创建HASH 表,并使用前面计算出的用于索引SHIFT 表的B 个字符串映像整数作为该表的索引。设HASH 表的第i 个入口为HASH[i],它包含了一个指向最后B 个字符散列值为i 的模式链表的指针。链表PAT_POINT 用于存储指向模式的指针,每个模式按其最后B 个字符的散列值大小排序。设h 为文本当前后缀的散列值,并假设SHIFT[i ]=0,此时HASH[h]的取值指针p 指向散列值为h 的模式链表首部。为查找链表尾,指针不断递增直至它等于HASH[h+1]。如果SHIFT[i ]≠0,则有HASH[h]= HASH[h+1],因为不存在后缀散列值为h 的模式。 (3)PREFIX 表的创建多模式中肯定会出现相同后缀的情况,导致HASH 表冲突,即所有具有相同后缀的模式将映像到HASH 表中的同一入口。为了加快在相同后缀中查找确切匹配模式的速度,算法还引入了用于区分这些模式的一个称为PREFIX 的表。除了将所有模式的后B 个字符做一映像之外,还须将所有模式的前B 个字符映像到PREFIX 表中。 如果发现SHIFT 值为0,并且要在HASH 表中确定是否存在匹配,那么就在PREFIX 表中检查该值。对每个后缀而言,HASH 表不仅包含具有所有此后缀的模式,而且还包含了他们相应的前缀。可以通过左移m-B 个位置计算出文本中的相应前缀,并用它来过滤那些后缀相同但是前缀不同的模式。 2. 扫描阶段 扫描阶段的流程如下:(1)计算tm-B+1到tm 的基于文本当前B 个字符的散列值h ;(2)检查SHIFT[h]的取值,如大于0,移动文本返回(1),否则转至(3);(3)从当前位置向左m 个字符处开始计算文本中的前缀散列值,称为文本前缀;(4)检查每个p ,SHIFT[h]≦p <HASH[h+1],是否有PREFIX[P]=text-prefix 。如果相等,那么就直接检查与文本相对应的实际模式(由PAT_POINT[p]给出)。 参考文献: [1] Crosbie , Gene Spafford. Defending a Computer System using Autonomous Agent[R].COAST Technical Report No.95-022, March 1994. [2] Aho A , Corasick M. Efficient String Matching an Aid to Bibliographic Search [J]. Communication of the ACM , 1975, 18(6) : 333-340.