全景鱼眼平面图像摄像头Fisheye Image Correction Camera
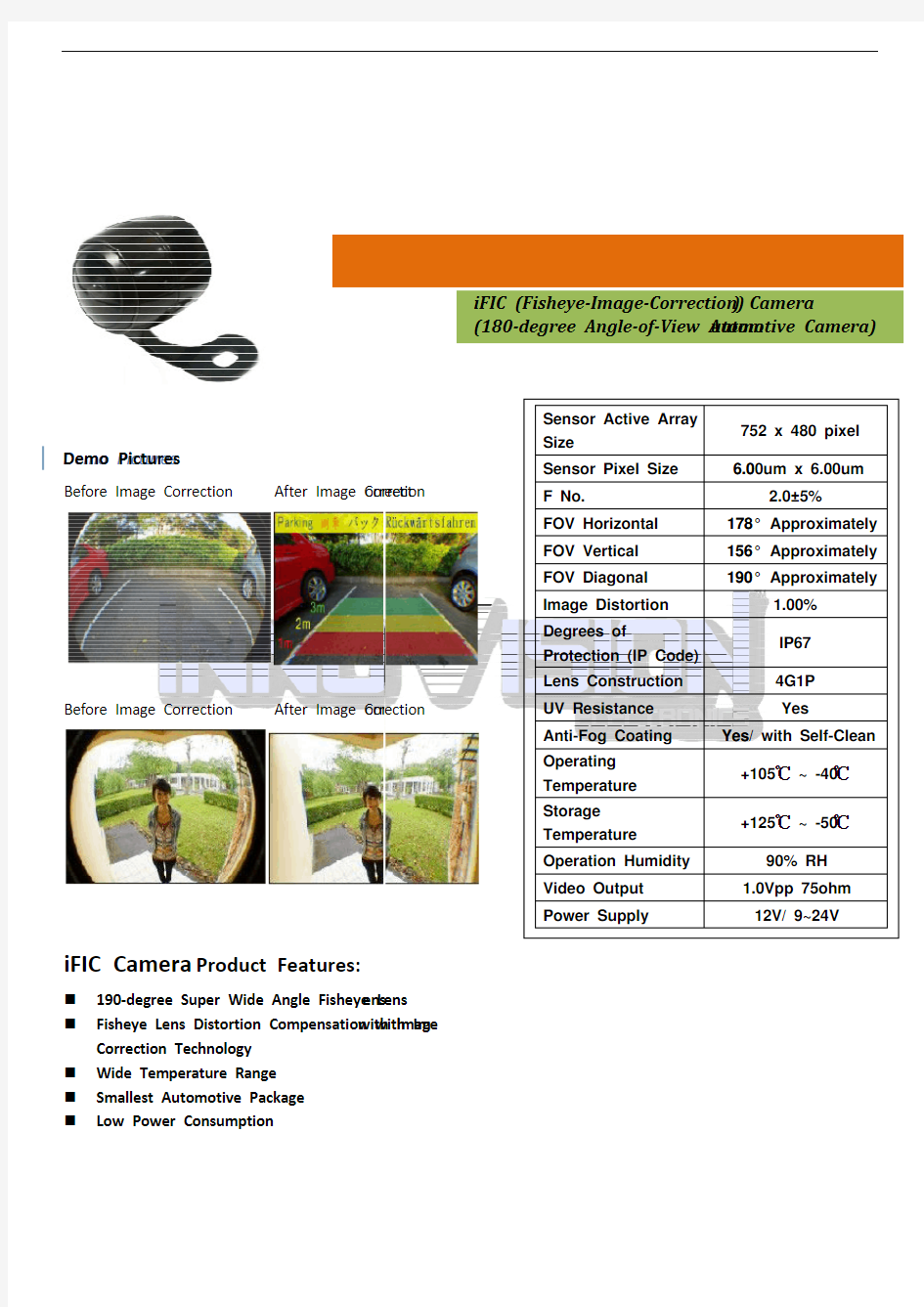
iFIC (Fisheye-Image-Correction) Camera ) (180-degree Angle-of-View Automotive Camera View Camera)
Sensor Active Array
Demo Pictures Pictures
Before Image Correction After Image Correction
Size Sensor Pixel Size F No. FOV Horizontal FOV Vertical FOV Diagonal Image Distortion Degrees of Protection (IP Code) Lens Construction
752 x 480 pixel 6.00um x 6.00um 2.0±5% 178° Approximately 156° Approximately 190° Approximately 1.00% IP67 4G1P Yes Yes/ with Self Self-Clean +105℃ ~ -40℃ +125℃ ~ -50℃ 90% RH 1.0Vpp 75ohm 12V/ 9~24V
Before Image Correction
After Image Correction
UV Resistance Anti-Fog Coating Operating Temperature Storage Temperature Operation Humidity Video Output Power Supply
iFIC Camera Product Features:
n n n n n 190-degree Super Wide Angle Fisheye Lens Fisheye Lens Distortion Compensation with Image Correction Technology Wide Temperature Range Smallest Automotive Package Low Power Consumption
PS全景拼接六大步骤
https://www.360docs.net/doc/f512947256.html, PS全景拼接六大步骤 全景拼接的原理是将多张连续的照片拼接成一张全景照片。目前许多无反相机、便携数码相机和智能手机都内置有这种功能。若是使用没有全景拼接功能的单反相机拍摄,我们也可以利用后期软件自行制作高画质、高像素的全景拼接照片。制作时只要遵守一些拍摄法则与拼接步骤,一样可以轻松达成。 其实全景拼接功能非常实用,可以大幅扩展镜头的表现能力,但在技术上,单张照片的拍摄质量会直接影响后期合成的效果。拍摄要点简要列举如下,做到了这些,就能获得理想的全景拼接效果。 使用三脚架,确保证拍摄位置固定和水平。 使用标准或中焦镜头,以维持最小的镜头畸变和变形。 使用手动曝光、手动白平衡、手动对焦,使画面均一。 每两张画面之间有1/3的区域是重迭的。 照片拼接步骤 Photoshop CS3之后的版本让全景拼接变得非常容易,在此以Photoshop CS5版为例来进行讲解。本例中一共要用到五张照片。 第一步 用Photoshop打开需要拼接的照片。 第二步 选择“文件”→“自动”→“Photomerge”,进入“自动拼接”。 第三步 选择已打开的图片。
https://www.360docs.net/doc/f512947256.html, 第四步 在拼接方式中选择“自动”。 第五步 等待软件自动合成,一张全景照片就拼接完成了。 第六步 裁剪拼接完成的照片为长条状,合并图层后储存文件,全景拼接的照片就可使用了。 云南碧沽天池。使用50mm镜头拍摄再进行全景拼接,很容易就可以得到较好的效果。EF 50mm f/1.8,f/11,1/200s,ISO 100(摄影/杜永乐) 强大的软件功能提供了很多帮助,使摄影师创作时更得心应手,这也是摄影能够在数字时代蓬勃发展的原因之一。善用这些软件,就能为拍摄增加许多乐趣,也能让工作成果更完美。
【CN109934765A】高速相机全景图像拼接方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910162807.8 (22)申请日 2019.03.05 (71)申请人 北京环境特性研究所 地址 100854 北京市海淀区永定路50号 (72)发明人 李海涛 闫鑫 石春雷 杨文佳 崔述金 杨桦 李伯轩 王永艳 (74)专利代理机构 北京格允知识产权代理有限 公司 11609 代理人 周娇娇 张沫 (51)Int.Cl. G06T 3/00(2006.01) G06T 3/40(2006.01) (54)发明名称 高速相机全景图像拼接方法 (57)摘要 本发明涉及一种高速相机全景图像拼接方 法,包括将高速相机设置在转台上,高速相机的 曝光间隔至多设置为转台转角位移等于相机横 向视场角时所经历的时间;使转台匀速旋转 360°,同时高速相机按照所述的曝光间隔对目标 成像;高速相机获取的每幅原始目标图像对应的 转台转角位移通过码盘的码盘值确定;将所有原 始目标图像依据对应的码盘值按成像的时间排 序,并采用非线性算法对相邻两幅原始目标图像 进行配准,去掉重叠区域,获得去重后的目标图 像;将所有去重后的目标图像按所述排序拼接在 一起,形成360°全景图。本发明利用码盘值对图 像进行排序,效率高,提高了图像的拼接效率,从 而能够快速获得全景图像。权利要求书2页 说明书6页 附图3页CN 109934765 A 2019.06.25 C N 109934765 A
1.一种高速相机全景图像拼接方法,其特征在于,包括将高速相机设置在转台上,高速相机的曝光间隔至多设置为转台转角位移等于相机横向视场角时所经历的时间; 使转台匀速旋转360°,同时高速相机按照所述的曝光间隔对目标成像;高速相机获取的每幅原始目标图像对应的转台转角位移通过码盘的码盘值确定; 将所有原始目标图像依据对应的码盘值按成像的时间排序,并采用非线性算法对相邻两幅原始目标图像进行配准,去掉重叠区域,获得去重后的目标图像;将所有去重后的目标图像按所述排序拼接在一起,形成360°全景图。 2.根据权利要求1所述的高速相机全景图像拼接方法,其特征在于,所述对相邻两幅原始目标图像进行配准包括,估算相邻两幅原始目标图像重叠区域的大小。 3.根据权利要求2所述的高速相机全景图像拼接方法,其特征在于,所述对相邻两幅原始目标图像进行配准还包括,根据估算的相邻两幅原始目标图像重叠区域的大小计算相邻两幅原始目标图像的20个非线性相关矩阵,所述20个非线性相关矩阵分别对应不同大小的疑似重叠区域; 对每个非线性相关矩阵的两个峰值求和得到一个Sum值,由20个非线性相关矩阵获得的20个Sum值组成一维向量,计算所述一维向量梯度变化最大的点,由所述梯度变化最大的点计算出相邻两幅原始目标图像的精确重叠区域。 4.根据权利要求3所述的高速相机全景图像拼接方法,其特征在于,在原始目标图像中去掉所述精确重叠区域,获得去重后的目标图像。 5.根据权利要求1至4中任一项所述的高速相机全景图像拼接方法,其特征在于,所述高速相机的曝光间隔t为: t≤c/v s , 式中c为相机横向视场角,v s 为转台转速。 6.根据权利要求1至5中任一项所述的高速相机全景图像拼接方法,其特征在于,第n幅原始目标图像对应的码盘值αn 为: 式中α1为第一幅原始目标图像对应的码盘值,αmax 为码盘值的最大值, n为原始目标图像的顺序数。 7.根据权利要求1至6中任一项所述的高速相机全景图像拼接方法,其特征在于,估算相邻两幅原始目标图像重叠区域的大小包括: 计算相邻两幅原始目标图像重叠区域的像素数Δpix: 式中m为高速相机的横向像素数。 8.根据权利要求7所述的高速相机全景图像拼接方法,其特征在于,根据相邻两幅原始目标图像重叠区域的像素数Δpix在Δpix ± 10的像素范围内截取20个图像对为: 权 利 要 求 书1/2页2CN 109934765 A
动物眼睛看世界 鱼眼180°全景监控视觉
动物眼睛看世界鱼眼180°全景监控视觉 北京安防监控,安防监控设备,安防监控系统,安防监控工程商,视频安防监控系统https://www.360docs.net/doc/f512947256.html,/ 人类的眼睛就是一台高速摄像机,每天记录着不同人的生活状态。但是你是否了解动物眼中 的世界呢?你是否知道马看不到两眼中间区域、鸟至少可以看到5种光谱带、猫和狗的夜视 能力最好、蛇依靠着红外线感知。其实,动物的眼睛可以看到许多我们看不到、看不全的东西。今天请您跟我一起体验一次鱼眼视觉盛宴。 透过"鱼眼"看世界 鱼用眼睛看世界,世界的形状发生了变化。我们怎么透过鱼眼来看到世界呢?答案就是鱼眼镜头。鱼眼镜头是一种超短焦镜头,可视角度在220°~230°左右,为了抓拍到全景效果, 所拍摄物体发生了合理性的桶形畸变。在摄影领域,这种畸变给人以视觉冲击;在视频监控领域中,这种畸变能够达到监控无死角的效果。 动物眼睛看世界鱼眼180°全景监控视觉 鱼眼全景监控也高清
对于全景摄像机来说,分辨率仍然是衡量设备先决条件。高质量的成像与传感器、图像编解码、元器件等有关联。为了能够实现更清晰的景象,高清图像采用大尺寸(1/2英寸)CMOS传感器;ISP的处理、编码以及与网络相应的配合都很重要,并且在相应的结构和元器件工艺上更要精益求精。 单镜头鱼眼监控应用 鱼眼全景抓拍出的图像一定是发生畸变的,那么对于图像还原算法尤为突出。为了保证让展开的图像不失真、不是比例,图像矫正还需要从镜头开始选择。通过镜头的曲率特征分析、光学折射线路分析,再结合透光亮分析,以达到大景深、高分辨率的图像。除了中心图像清洗外,一张图像的周边图像更要做到高清解析。 全景摄像机鱼眼仅是其中之一 鱼眼全景摄像机适用于广场、车站等视野范围较为开阔的地方,为了能够达到更要的图像效果,主流鱼眼监控设备采用数字网络化传输,尽管一台设备的价格较高,但是特殊的视角范围其实更节省了监控布点的难题。
手持全景拍摄-拼接-全景漫游制作教程实例
手持全景拍摄-拼接-全景漫游制作教程实例 地点:德庆龙母庙-前广场 拍摄:手持,单反+鱼眼镜头 拼接:PTGui v9.1 漫游制作:Pano7cd v1.0 一、拍摄 当天到了德庆龙母庙,人比较多,天气还算可以。由于没有带脚架,手持拍了两组练习一下,找一位置四面各拍一张,对天、地拍一张,注意是以镜头为中心拍摄。这个我还得多练习。。。拍得不好。 二、全景图拼接 1、打开PTGui开始拼接,PTGui的基本操作就不多说了。我在另外的两个教程讲过了。具体可以查看: PTGui pro拼图教程例子(基本操作、自动对准) PTGui pro全景图拼接教程例子(手动拼接)(二) 由于是手持拍摄的。节点肯定是不精确的。我选择选把水平的四张先拼好,再拼天补地的方法。 1、拉四面的照片进PTGui,直接对准图像,很幸运一次拼接成功! 基本的全景图出来了。现在要补天。 2、把拍天的图片拖拉进PTGui,然后转到“全景编辑器”窗口,点第二个按钮(编辑个别图 像),再点图像4(补天的照片),把图像4向上拉平,这里可以看到有两棵树(已经圆圈标出)可以作参考,可以很方便的对齐天空与四周的拼接。其实在拍摄时候注意找照片间的参考点是很重要的,对手动拼接非常有用。现在我们只需左右拖动,对齐就可以实现完美补天了。
3、现在剩下补地及细节处理了。由于补地的照片拍摄时候和其它的照片的节点位置可能差太多了,估计比较难拼接(以后还是得多加练习才行了)。我发了教程在全景栖息地论坛(http://www.7cd.co/bbs)同样把补地照片拉进PTGui,和补天一样,拉开》》对齐(比较难,好在地面上有个垃圾袋作参考)。 实际出来的结果是不满意的。 4、我们需要通过图像参数来调整一下。选择“图像参数”》》图像5》》调整X、Y、Z轴,》》用全景图编辑器里的放大镜查看细节,以便看结果。通过多次调整,把这三个参数多次尝试后。基本反站位处调整好了。
VR全景拍摄方法及拍摄技巧
https://www.360docs.net/doc/f512947256.html, VR全景拍摄方法及拍摄技巧 关于拍照VR全景拍摄符合需求的相片如下:不知你是运用传统相机仍是数码相机,主张运用数码相机。以下以数码相机Nikon Coolpix990为例,传统相机拍照进程迥然不一样。 第一步:准备好相机(放入电池和存储卡,装置鱼眼镜头). 第二步:设置鱼眼镜头 1. 将快门旋转键旋至M-REC形式。 2. 两次按下MENU键,在LCD屏幕上显现Shooting菜单。 3. 用上下键挑选Lens项,按下右键选中Lens菜单。 4. 在Lens选项中挑选Fisheye 1选项,并按下右键承认。
https://www.360docs.net/doc/f512947256.html, 5. LCD屏幕将退回至正常显现。 第三步:设置图象质量(1024X768 Fine格局) 1. 按住QUAL键,挑选图像格局(通常挑选XGA)。 2. 按下QUAL键,在"Normal", "Hi", "Fine", "Basic" 中挑选。当LCD 屏上呈现"FINE"字样时,按下右键选中。 3. 松开QUAL按键,退出此选项。 第四步:预设白平衡 1. 将快门上的开关按钮旋至M-ERC形式。 2. 按下MENU键,用上下键挑选White Balance项,按下右键选中。 3. 依据拍照时的具体情况挑选日光、白炽灯、荧光、多云等不一样的灯火装备选项。 第五步:设置曝光锁(使拍照的相片光圈、快门速度、感光度和白平衡共同) 1. 将快门上的开关按钮旋至M-ERC形式。
https://www.360docs.net/doc/f512947256.html, 2. 按两下MENU键,选中Shooting菜单里的第二页。 3. 用上下键挑选AE锁,并按下右键选中它。 4. 用上下键挑选ON,并按下右键选中。 . 二、360全景拍照相片 第一步:装置三脚架和相机 1. 注意相机镜头和三脚架转轴处于同一中心点。 2. 三脚架云台、相机和镜头三者同地上要坚持水平。 第一步:装置三脚架和相机 1. 注意相机镜头和三脚架转轴处于同一中心点。 2. 三脚架云台、相机和镜头三者同地上要坚持水平。 第二步:拍照第一张相片按需求将相机装备好,将相机镜头对准前方,拍照第一张相片。
全景拼接算法简介
全景拼接算法简介 罗海风 2014.12.11 目录 1.概述 (1) 2.主要步骤 (2) 2.1. 图像获取 (2) 2.2鱼眼图像矫正 (2) 2.3图片匹配 (2) 2.4 图片拼接 (2) 2.5 图像融合 (2) 2.6全景图像投射 (2) 3.算法技术点介绍 (3) 3.1图像获取 (3) 3.2鱼眼图像矫正 (4) 3.3图片匹配 (4) 3.3.1与特征无关的匹配方式 (4) 3.3.2根据特征进行匹配的方式 (5) 3.4图片拼接 (5) 3.5图像融合 (6) 3.5.1 平均叠加法 (6) 3.5.2 线性法 (7) 3.5.3 加权函数法 (7) 3.5.4 多段融合法(多分辨率样条) (7) 3.6全景图像投射 (7) 3.6.1 柱面全景图 (7) 3.6.2 球面全景图 (7) 3.6.3 多面体全景图 (8) 4.开源图像算法库OPENCV拼接模块 (8) 4.1 STITCHING_DETAIL程序运行流程 (8) 4.2 STITCHING_DETAIL程序接口介绍 (9) 4.3测试效果 (10) 5.小结 (10) 参考资料 (10) 1.概述 全景视图是指在一个固定的观察点,能够提供水平方向上方位角360度,垂直方向上180度的自由浏览(简化的全景只能提供水平方向360度的浏览)。 目前市场中的全景摄像机主要分为两种:鱼眼全景摄像机和多镜头全景摄像机。鱼眼全景摄像机是由单传感器配套特殊的超广角鱼眼镜头,并依赖图像校正技术还原图像的鱼眼全景摄像机。鱼眼全景摄像机
最终生成的全景图像即使经过校正也依然存在一定程度的失真和不自然。多镜头全景摄像机可以避免鱼眼镜头图像失真的缺点,但是或多或少也会存在融合边缘效果不真实、角度有偏差或分割融合后有"附加"感的缺撼。 本文档中根据目前所查找到的资料,对多镜头全景视图拼接算法原理进行简要的介绍。 2.主要步骤 2.1. 图像获取 通过相机取得图像。通常需要根据失真较大的鱼眼镜头和失真较小的窄视角镜头决定算法处理方式。单镜头和多镜头相机在算法处理上也会有一定差别。 2.2鱼眼图像矫正 若相机镜头为鱼眼镜头,则图像需要进行特定的畸变展开处理。 2.3图片匹配 根据素材图片中相互重叠的部分估算图片间匹配关系。主要匹配方式分两种: A.与特征无关的匹配方式。最常见的即为相关性匹配。 B.根据特征进行匹配的方式。最常见的即为根据SIFT,SURF等素材图片中局部特征点,匹配相邻图片中的特征点,估算图像间投影变换矩阵。 2.4 图片拼接 根据步骤2.3所得图片相互关系,将相邻图片拼接至一起。 2.5 图像融合 对拼接得到的全景图进行融合处理。 2.6 全景图像投射 将合成后的全景图投射至球面、柱面或立方体上并建立合适的视点,实现全方位的视图浏览。
360度全景摄像技术原理介绍样本
360度全景摄像技术原理简介 普通只有在必要状况下,咱们才费尽周折地试图在狭小空间安装视频监控设备。就当人们开始将要习惯忍受这样架设行为时(固有需求矛盾所制),悄然产生一种新生力量---- 360度全景摄像。 以往咱们在狭小空间试图构建监控系统,无外乎会采用几种方案:短焦距镜头摄像机、调节安装位置、或多摄像机联动对射等。但以上几种方式都存在着不同应用缺陷;选取短焦距镜头摄像机时,水平可视范畴不大于80度(广角也超但是90度),因而监控范畴较小;调节安装位置,往往受到客观环境制约而影响稳定安装(例如一面是玻璃、一面是门、顶上有电线或无法承重装饰吊顶等等);选取多摄像机联动对射,不但增长了设备投入成本,也使得施工变得更加繁琐。 一360度全景摄像技术简介 顾名思义,360度全景摄像就是一次性收录先后左右所有图像信息,没有后期合成,更没有多镜头拼接。其原理根据仿生学(鱼眼构造如图1)采用物理光学球面镜透射加反射原理一次性将水平360度,垂直180度信息成像(如图2),再采用硬件自带软件进行转换,以人眼习惯方式呈现出画面。
图1 鱼眼构造 图2 鱼眼镜头硬件示意图 鱼眼镜头是一种超广角特殊镜头,其视觉效果类似于鱼眼观测水面上景物。鱼眼睛类似人眼构造,但是相对于扁圆形人眼水晶体,鱼眼水晶体是圆球形,虽然只能看到比较近物体,但却拥有更大视角。 图3中,人眼看水中实物,由于实物反射光线在水中发生折射,使人误觉得物体处在虚像位置(例如水中筷子弯曲现象)。依照折射原理,光从空气斜射入水等介质中时,折射角不大于入射角;光从水等介质斜射入空气中时,折射角不不大于入射角。也可以概括为,光
720全景视频拍摄教程
在网络上要展示交互式的空间或物体效果时,大致有两种方法,一种是直接3d制作原始模型,然后贴图渲染在发布到网络上。另一种就是要涉及到全景。因为全景图片是直接从实物拍摄而成,只要前期的拍摄和后期的全景软件处理做得好的话,其真实感要好于用三维制作的效果。制作高质量的全景图片至少需要了解以下几个方面: 一、了解720丁丁猫全景视频和传统摄影的区别: 1.由于全景是要捕捉场景360°范围内的所有信息,所以一般用鱼眼镜头来拍摄(一般为视角等于或大于180°,焦距6mm~16mm之间的超广角镜头),鱼眼镜头镜片结构复杂,边缘和中央进光有差异,全景镜头无法使用遮光罩,无法使用偏光镜,除了sigma8mm能使用滤光片以外,大部分的全景镜头都无法使用等等。 2.720丁丁猫全景视频由于更多地需要后期的图像处理,更注重于数码摄影,而更多的摄影师目前还是使用传统的胶片相机。很显然数码摄影和胶片摄影的差别是相当大的,对同样的场景条件,用同样的参数,出来的结果可能相差非常远。数码摄影牵涉了太多电子的东西,发热了,振动了,冷了,光线太强了都难出好效果。 3.全景一般更侧重于表现场景的全局信息,所以720丁丁猫全景视频更注重选点,传统摄影更注重于构图。 4.全景更注重从全局光线去考虑,所以大部分的全景都是拍摄在晴朗的,光线充足的时候一般秋高气爽的时候,对场景整体光照比较讲究,世界的大部分720丁丁猫全景视频师都在大白天甚至烈日当中四处游曳,而传统摄影更喜欢早出晚归,在绝大部分光线条件下都可以拍出好的作品来。 5.全景在景深方面没有太多的选择余地;在有太多运动物体的场景里由于受拼合等限制无法有良好的发挥。 二、选择好的摄影设备: 720丁丁猫全景视频,您需要有一个好的数码照相机,一个鱼眼镜头,一个专业的全景头和一个性能优秀的脚架,推荐以下几个配套方案: Nikon Coolpix4500、990、995、5000、5700相机+ FC-E8、FC-E9鱼眼镜头+ kaidan kiwi系列云台、全视角4500全景头+脚架,Nikon D100 D1 D2H,Canon 1DS,Kordak14n数码相机+sigma8mm鱼眼镜头+manfrotto全景头+脚架。 以上设备已经过全景色友们的实践证明确实可行。如果采用传统相机+鱼眼镜头的,则要考虑用专业的底片扫描仪了。 三、选择光线环境: 全景不需要太多的光怪陆离,一般选择在能见度佳,气温低,空气纯净,光照充足的时候,秋高气爽的午后或者是晴空万里的海边,雪山,草地是出全景照片最好的地方,如果要拍夜
360°全景拼接技术简介
本文为技术简介,详细算法可以参考后面的参考资料。 1.概述 全景图像(Panorama)通常是指大于双眼正常有效视角(大约水平90度,垂直70度)或双眼余光视角(大约水平180度,垂直90度),在一个固定的观察点,能够提供水平方向上方位角360度,垂直方向上180度的自由浏览(简化的全景只能提供水平方向360度的浏览),乃至360度完整场景范围拍摄的照片。 生成全景图的方法,通常有三种:一是利用专用照相设备,例如全景相机,带鱼眼透镜的广角相机等。其优点是容易得到全景图像且不需要复杂的建模过程,但是由于这些专用设备价格昂贵,不宜普遍适用。二是计算机绘制方法,该方法利用计算机图形学技术建立场景模型,然后绘制虚拟环境的全景图。其优点是绘制全景图的过程不需要实时控制,而且可以绘制出复杂的场景和真实感较强的光照模型,但缺点是建模过程相当繁琐和费时。三是利用普通数码相机和固定三脚架拍摄一系列的相互重叠的照片,并利用一定的算法将这些照片拼接起来,从而生成全景图。 近年来随着图像处理技术的研究和发展,图像拼接技术已经成为计算机视觉和计算机图形学的研究焦点。目前出现的关于图像拼接的商业软件主要有Ptgui、Ulead Cool 360及ArcSoft Panorama Maker等,这些商业软件多是半自动过程,需要排列好图像顺序,或手动点取特征点。 2.全景图类型: 1)柱面全景图 柱面全景图技术较为简单,发展也较为成熟,成为大多数构建全景图虚拟场景的基础。这种方式是将全景图像投影到一个以相机视点为中心的圆柱体内表面,
视线的旋转运动即转化为柱面上的坐标平移运动。这种全景图可以实现水平方向360度连续旋转,而垂直方向的俯仰角度则由于圆柱体的限制要小于180度。柱面全景图有两个显著优点:一是圆柱面可以展开成一个矩形平面,所以可以把柱面全景图展开成一个矩形图像,而且直接利用其在计算机内的图像格式进行存取;二是数据的采集要比立方体和球体都简单。在大多数实际应用中,360度的环视环境即可较好地表达出空间信息,所以柱面全景图模型是较为理想的一种选择。 2)立方体全景图 立方体全景图由六个平面投影图像组成,即将全景图投影到一个立方体的内表面上。这种方式下图像的采集和相机的标定难度较大,需要使用特殊的拍摄装置,依次在水平、垂直方向每隔90度拍摄一张照片,获得六张可以无缝拼接于一个立方体的六个面上的照片。这种方法可以实现水平方向360度旋转、垂直方向180度俯仰的视线观察。 3)球面全景图 球面全景图是指将源图像拼接成一个球体的形状,以相机视点为球心,将图像投影到球体的内表面。与立方体全景图类似,球面全景图也可以实现水平方向360度旋转、垂直方向180度俯仰的视线观察。球面全景图的拼接过程及存储方式较柱面全景图大为复杂,这是因为生成球面全景图的过程中需要将平面图像投影成球面图像,而球面为不可展曲面。因此这是一个平面图像水平和垂直方向的非线性投影过程,同时也很难找到与球面对应且易于存取的数据结构来存放球面图像。目前国内外在这方面提出的研究算法较其他类型全景图少,而且在可靠性和效率方面也存在一些问题。 3.主要内容
鱼眼全景网络摄像机
鱼眼全景网络摄像机 概述: 鱼眼摄像机可以独立实现大范围无死角监控的全景摄像机,其概念与初级成品诞生已久,但成熟商用产品直到08年才正式出现。又因为目前国内安防方面的标准大多围绕模拟摄像机与网络摄像机展开,故此对于全景摄像机还没有较为统一的标准定义,使得在具体到某些项目实施的过程中会存在认同度方面的问题。总的说来,当下主流全景摄像机采用吊装与壁装方式可分别达到360°与180°的监控效果,而某些只有120°到130°视场角的摄像机,因为能达到客户对一个较为开阔面积的监控诉求,亦可被称为全景摄像机。 主要特点: ◆130万@25帧; ◆高感度并红外增强SONY传感器; ◆高透/高解Puwell全玻璃鱼眼镜头,水平/垂直视场角都大于185度; ◆高感低噪拾音系统; ◆内置全向红外照明; 技术参数: 镜头鱼眼镜头, f=1.29mm, F=2.2 视场角水平185°/垂直185° 光圈固定 成像器件1/3" 逐行扫描CMOS 灵敏度0.2Lux@F2.0(彩色)/0.02Lux@F2.0(黑白) 日夜转换自动切换红外截止滤光片 红外照明1W@850nm 图像翻转水平/垂直翻转 图像调整亮度、饱和度、锐度、对比度、色调 最大像素130万(1280×1024) 视频编码H.264双码流 视频码流128Kbps~6020Kbps 最大帧率25fps 麦克风内置 音频编码G.711 拾音距离6米 全景功能注:需要后端软件支持 全景显示支持顶装、壁装和地装等安装模式的投影展开,支持多分割窗口的虚拟摄像机显示
数字云台支持DPTZ,数字平移/倾斜/变倍 移动侦测20×15区域侦测,侦测灵敏度1~6可调 告警触发移动侦测/视频遮挡/异常处理/告警输入 告警动作告警录像/图像抓拍,告警视频/图像上传(FTP/Email方式)协议TCP/IP,HTTP,DHCP,DNS,RTP/RTSP,FTP,PPPOE,SMTP,NTP 兼容性ONVIF2.0 通信接口1路RJ45 10M/100M 自适应以太网 电源接口?5.5-2.1mm 圆形DC插座 本机存储最大支持128G SD 卡 供电DC12V±10%,1A 功耗<5W 工作条件-15℃~+50℃@湿度10%~ 95%无凝结 存储条件-40℃~+75℃@湿度10%~ 95%无凝结 电磁兼容性CE,FCC 外壳PC,米色 防护等级IP50 产品尺寸Φ100*35mm 重量(kg)N.W.:0.2 / G.W.:0.3
全景拼接教程—PTGuiPro
PTGui Pro软件全景拼接教程 PTGui Pro是一个多功能的图片全景制作工具,提供可视化界面来实现对图像的拼接,从而创造出高质量的全景图象。 经常有时候拍PP的时候,相机的广角不够广,或者广角的变形大,就可以考虑用拼图的方式来拍摄,另外如果要拍摄大场景的照片,或者全景的时候也可以用拼图,拼图可以更好地展现气势恢弘的场景。 一、拼图拍摄的时候要注意的地方 1.尽量用同一组拍摄参数。 先用相机的测光来测一下光圈快门,然后拨到手动模式,把光圈和快门数据,设定到此参数。如果要求高的,甚至用手动对焦模式,把对焦也固定下来,另外还有白平衡模式用白板或者灰板固定。要求简单的怕麻烦的也可以全部自动模式,不过效果就要打折扣很多了。 2.拍摄时的注意点。 以身体为中心,旋转着拍摄,两张照片中间一定要留有一定的相重合的地方,重合的地方尽量不要小于1/4的画面,一般来说重合的占画面比例为1/2-1/3之间,就能有效提高后期处理的精度,减少广角边缘的变形对画面影响。 3.拍摄的时候可以横幅或者竖幅。相比之下,竖幅可以有效提高最后出片的竖相高度。 二、软件的简单使用 以去婺源拍的拼图来做一次教程,具体步骤参考图片。 1、下图是彩虹桥的原片,一共拍摄了5张。可以看到原片中每张直接的重合部分的比例有4X%,这样可以方便后期拼图,另外这个原片使用的是竖拍的。
2、打开PTGui软件,进入软件界面。
3、点击加载图像,在出现的对话框里面选择要拼图的原片。
4、对图像进行旋转,使得竖片竖过来,然后调整图像顺序。
5、对图像顺序调整,反序正序,或者增减图像。
全景拍摄注意事项
360度全景照片拍摄注意事项 在拍摄全景照片之前期有良好的规划,事先对场地、环境有一个初步的估算,拍摄过程中会顺利不少。在拍摄过程中,为了获取高质量的全景照片,还必须要注意一下几点: 1、图像噪声Noise 电池传感器CCD的灵敏度(ISO)。 ISO越小,噪声越小;默认值为100,可以调整为200,400,800。(自动拍摄模式下当光线较暗时会自动增加ISO值,导致噪声增加) 解决办法:尽量用ISO100。相机拍摄的时候不要开太长时间,开了以后,马上拍摄。 CCD温度 CCD温度越高,噪声越大。根据经验,温度每升高6-8度,噪声增加一倍。 解决办法:拍摄的时候,先把相机放到阴凉的地方,需要拍摄了才拿出来。 曝光时间 但曝光时间长于1/4s,甚至到1-2s,出现StuckPixel。 解决办法:通过拍摄一幅相同DarkFrame(采用相同的曝光时间拍摄一幅黑色的图像)。有的相机支持DC4800、CanonEOS-D30digitalSLR。在这里需要指出我们原来认识上的一个误区:光圈越小越好(F值越大越好)。较小的光圈可以获得较大的景深,所以我们建议采用较小的光圈,但这也不是说F值越大越好,因为如果环境光线较弱,而鱼眼镜头拍摄又不能使用闪光灯,使用较小的光圈可能会是的曝光时间变得比较长。如果曝光时间大于1/4s,可能会给图像带来明显的噪声(Noise),这时就需要在光圈和快门之间做一个权衡取舍。 其他降噪方法:采用Photoshop等图像处理软件。 2、光圈 光圈影响景深。光圈越小(F值越大),景深越大(清晰范围越大);光圈越大(F值越小),景深越小。鱼眼镜头拍摄图像物距是无穷远的,要求全景图像景深比较宽(也就是在相当宽的范围内聚焦效果比较好),这就是为什么全景摄影采用较大的F值的原因。 3、景深
鱼眼镜头与鱼眼全景监控摄像机技术介绍
鱼眼镜头与鱼眼全景监控摄像机技术介绍 鱼眼镜头是构建全景视觉最简单有效的方法之一,它的突出特点是一次性可摄入超过180度视角内所有的信息,从而达到无盲区效果。从特性而言,鱼眼镜头是一种超广角的特殊镜头,这种摄影镜头的前镜片直径且呈抛物状向镜头前部凸出,其视觉效果类似于鱼眼观察水面上的景物。它是一种短焦距镜头,一般焦距在F=6-16mm之间,根据光学成像原理,短焦距才能呈现出大视场的监控效果。常见的鱼眼镜头有两种,一种是圆形成像,一种是矩形成像。前者可摄的三维角度相比后者要大,目前大多数全景摄像机选用的鱼眼镜头均是第一种,因为其三维视角可达到360度x180度,达到理想的全景视角。虽然 视场角提供了无与伦比的享受,但却是以牺牲原有监控画面为前提获得的,鱼眼镜头这种变形的图像一般称之为桶形畸变,这种畸变会随着视场角的扩大而严重,不过,这也是一种合理现象。一般的监控探头视场角度在60度-90度左右,如果监控场所有大范围的监控需求,如果只是多装几支摄像头来实现监控区域的覆盖,无疑会增加摄像头成本与安装成本,后端的显示与存储成本也会相应的增加;即便是球机可以通过云台实现360度全范围监控,但却不能达到同时监控360度的范围,而且在实际应用当中,多数球机都通过设置预置位对场景进行监控,难以避免重要事件被“漏控”的情况出现。在当前的安防市场上,一随着视频监控盲点越发不被人们所忍受,市场对无盲点视频监控系统的要求也愈来愈烈。而全景摄像机就是实现全景监控,它的出现可在真正意义上消除监控盲区,确保视频的可靠性、完整性,对用户乃至对社会而言意义非凡。其中有一种类型是基于超广角鱼眼镜头的全景摄像机。而鱼眼全景摄像机是对现有监控系统的改造与升级。在鱼眼全景监控系统中,只需要一台鱼眼全景摄像机即可实现全景无盲区监控,没有任何的机械部件,图像通过超广角的
全景拍摄原理
如何创建全景影像 解答 “缝合”这一术语表示利用软件,以电子方式将多个影像连接在一起制成较大影像。当以数字方式缝合全景影像时,拍摄的影像边缘必须完全重合,歪斜的相机会使最终影像的接缝不整齐。如果所有照片均以相同的曝光和白平衡设定拍摄,则最终影像效果会非常好,否则会出现亮度和色彩接缝。虽然这可使用软件纠正,但是在拍摄时就纠正,效果将会更好。 创建远距离物体的全景影像相对容易,以下是使用ArcSoft的“PanoramaMaker”软件将四个独立影像缝合在一起的影像例图。只要在用相机拍照时将单个影像很好地对齐(务必使相机与地面保持水平),软件即可创建完美的全景影像。 但是,拍摄前景和背景中物体的全景影像非常困难。为了消除视差错误,必须找出其光学中心(或“节点”)。以下例图显示拍摄前景和背景物体时出现的视差错误(数码相机固定在三脚架上,并从相同位置拍摄A和B影像。)。 A影像 - 相机朝向背景中的教堂,前景中有一棵树。 B影像- 相机在三脚架上转向左侧,因此只能看到教堂的左侧,但是前景中的树“似乎”相对于教堂的位置发生移动。 C影像 - 使用全景处理软件以电子方式缝合影像,但由于前景中的树“似乎”相对于教堂的位置发生移动,所此它出现了两次。 此错位现象叫作“视差错误”,当将影像缝合在一起时,缝合影像的全景软件将无法纠正此错误。 A B C 要纠正此错误,必须沿镜头的光学中心(或节点)旋转相机。镜头的节点是光路径在聚焦于相机感光器或胶片平面之前,在镜头中汇聚的一点。以三脚架插座为中心旋转相机几乎肯定会导致视差错误,因此需要先找到节点,然后固定相机,再以该节点为中心旋转相机。
高清图像全景拼接
高清图像全景拼接 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
全景拼接白皮书
目录
1 方案概述 1.1 市场需求 全景拼接系统,是以画面拼接技术为基础,将周围相邻的若干个摄像机画面拼接成一幅画面。传统视频监控系统,用户如果要实时监控一片连续的大范围区域,最常见的做法是,安装多个摄像机,每个负责一小片区域,该方案的主要缺陷是,用户没有画面整体感,很难连续追踪整个区域内的某个目标。全景拼接系统,能很好的解决上述问题。 传统意义上的全景拼接系统,虽然解决了“看的广”、“看的画面连续”的问题,但并没有解决“看的清”的问题。因此宇视的全景拼接系统中,增加了球机联动功能,以解决“看的清”的问题,一台10倍以上光学放大的球机可以看清100米甚至更远的目标。球机联动功能,是以枪球映射技术为基础,将全景画面坐标系和球机画面坐标系关联映射起来,用户只要在全景画面中拉框,球机就自动转动和变倍到指定位置,对用户来说这是一个设备,而不是孤立的两个设备。 全景拼接系统,主要应用于大范围监控,如广场、公园、景区、机场停机坪、机场大厅、物流仓库、大型生产车间、交通枢纽等。 1.2 方案特点 ●画面拼接:支持3个高清相机(最高1080P)的拼接。 ●画面拼接:拼接后最高分辨率可以达到5760×1080。 ●球机联动:支持1个球机(最高1080P)的联动。 ●球机联动:支持在全景画面中拉框放大,自动联动球机转动和变倍到指定位置。 2 组网模型 2.1 全景拼接 2.1.1 逻辑框图(或拓扑图) 2.1.2 原理描述 拼接原理: 拼接前提:用于拼接的摄像机,在图像内容上,两两相交。
基于鱼眼镜头的车载全景环视系统研究
基于鱼眼镜头的车载全景环视系统研究 发表时间:2019-09-03T16:54:23.430Z 来源:《科学与技术》2019年第07期作者:段军[导读] 现主要探讨摄像头在车辆上可以安装的位置和各种不同情况下的安装条件、安装角度对系统图像的影响以及常规情况下应取的角度的确定。 捷西迪(广州)光学科技有限公司广东广州 510670 摘要:全景系统是通过车辆前后左右四个全景摄像头图像拼接产生周边完整图像的车载设备,四个摄像头的安装位置、安装角度对于系统的图像拼接有着重要影响。尤其是在鱼眼镜头的支持下,车载全景环视系统能够为驾驶员带来更全面的视觉体验,从而带来诸多便利。现主要探讨摄像头在车辆上可以安装的位置和各种不同情况下的安装条件、安装角度对系统图像的影响以及常规情况下应取的角度的确定。关键词:全景系统;图像拼接;全景摄像头;安装角度;安装位置 1鱼眼镜头及车载全景环视系统概述 1.1鱼眼镜头概述 鱼眼镜头相比传统镜头具有更大的视场角。但由于其特殊的光学结构,鱼眼镜头引入了以径向畸变为主的图像畸变,目前各类畸变校正算法的实现,均依赖于鱼眼镜头图像轮廓的确定。提取鱼眼镜头的图像轮廓,主要是指获得圆形区域的圆心坐标及半径。随着图像处理技术的发展,在有限的条件下获得更多图像信息的需求越来越迫切。考虑到安装相机的成本和图像处理算法上的复杂性,在一定范围内,安装摄像机的数量越多,获取的信息越多越好。普通相机的视角一般在30°~40°,而鱼眼镜头可以获得180°左右的图像信息。 1.2车载全景环视系统概述 首先,目前大多数人使用的为360°全景行车系统,但360°全景行车记录仪虽然能够提供全面的图像记录功能可以对障碍物进行识别和检测。该系统能够通过起图像记录等功能,为用户呈现图像等,以便避免障碍物。其次,目前的360全景行车记录仪都只配置了前、后、左、右四个方向的相机。其三,目前汽车对障碍物的检测主要还是需要依靠超声波雷达完成,受到超声波雷达的功能限制,汽车无法使用超声波雷达对障碍物进行准备位置定位和大小识别,也无法实现障碍物的可视化,导致用户不能直观地了解障碍物的大小、位置和类型。比如专利CN205632288U《一种全景倒车影像系统》,其特征在于:包括图像采集模块、系统控制模块、图像显示模块、图像处理电路模块和图像拼接融合电路模块;所述图像采集模块的输出端分别与系统控制模块和图像显示模块的输入端连接;所述系统控制模块的一输出端与图像处理电路模块的输入端连接;所述图像处理电路模块的输出端经图像拼接融合电路模块与系统控制模块连接;所述系统控制模块的另一输出端与图像显示模块连接。 2影响全景图像拼接的结构因素 一般家轿、SUV安装全景系统的车型,其长度在4.5~5m的范围内,加上车辆需要显示的单边范围为2~3m,需要车载摄像头的最大拍摄范围达到7~11m。而车上适合安装摄像头的位置不多,高度一般也不超过1.2m。需要摄像头有比较广阔的取景角度(视场角),只有大广角的鱼眼摄像头能达到,所以全景用的摄像头就只能是鱼眼摄像头。平面拼接的摄像头水平视场角须大于170°,垂直视场角须大于110°;立体拼接要求更高,水平视场角须大于185°,垂直视场角须大于124°,这样拼接出来的图像才比较清晰。全景系统的图像质量取决于摄像头的摄取范围能否达到系统要求,而影响摄像头摄取范围的因素有摄像头的固定位置、高度和摄像头的摆放角度,固定位置和高度决定了图像的取图范围大小,而角度决定了图像能否覆盖需要取的位置,下面分别介绍对这些结构要素的要求。3摄像头的安装位置和高度要求 3.1前视摄像头的安装位置选择 车前部能安装摄像头的位置主要有上格栅、下格栅、前保险杠。出于车的结构完整、强度保持的需要,无论车厂还是4S店,都不允许通过打孔、开缝、切角等破坏车前部结构件的方式进行前视摄像头的安装[1]。所以,在保险杠上安装就不可能了。那就只有在上、下格栅(俗称“中网”和“风网”)上安装才比较合理。前视安装需要符合哪些条件,才能摄取到符合系统要求的图像呢?先说说高度。全景摄像头的分辨率约为30万像素,解像能力是640×480以上,从清晰度角度来说,2m以下都能摄取到足够清晰的图像;如果用百万像素级(1280×720)的高清摄像头,三四米的高度取的图仍能令人满意。车的宽度一般在1.8m左右,加上全景需能反映车身外2~3m距离内的图像,这样前摄就必须能取到周围6~8m范围内比较清晰的图像。 3.2后视摄像头的安装位置选择 后视摄像头的安装条件与前视相似,同样是越高越好,最好安装在中线上。在4S店加装全景系统,后视摄像头的安装要尽量用好已有的结构,后视的位置常选择取代两种车上现成的结构:倒车摄像头和牌照灯。两个位置的高度是一样的,一般都在1m以上的高位。倒车摄像头的位置是首选,这个位置比较靠中线,因为尾箱开箱提手位置的存在,倒车摄像头也不是处于正中,会偏一点[2]。对于自动锁尾箱的车,开锁位置不在正中,处在正中的就是倒车摄像头了。倒车摄像头的固定结构与全景后视摄像头相似,很容易就可以改为后摄,无需做太大改动。 4基于鱼眼镜头的车载全景环视系统设计 在车辆车头保险杠的中部设置前摄像头,在车的左后视镜的最左端设置左摄像头,在车的右后视镜的最右端设置右摄像头,在车的车尾中部设置有后摄像头,在车内部中部设置有车载计算机,车内的仪表板上方和风挡玻璃上设置有显示屏[3]。车身四周的摄像头用于采集车身四周图像,所有摄像头均与车载计算机相连接,车载计算机获取图像后进行图像处理,完成车身四周图像的全景图像合成。车载计算机通过人工智能和图像检测技术对由摄像头合成的全景图进行分析,找到可能危害行车安全的障碍物。车载计算机连接显示屏用于显示合成的全景图像和被计算机检测的障碍物位置,显示屏自带触控功能可完成人机之间的控制交互,方便驾驶员的操控[4]。由于需要实时完成对最少4个摄像头的图像拼接,还需要通过人工智能的方式自动识别车身周围的障碍物,所以对车载计算机的要求比较高。并且由于安装在车上,设备需要小型化。普通的嵌入式设备无法满足需求,本文采用嵌入式人工智能计算平台,例如Nvidia公司的JetsonTX2。JetsonTX2配置是满足了本文要求书中所提到的最低要求,达到这些要求才能完成本文的功能效果。
360度全景拍摄设备篇
360度全景拍摄设备篇 理论上,你可以使用任何照相机和镜头拍摄全景,即使除了照相机以外,你没有任何其他的设备,也都能拍摄360度全景。但是你很快会发现,只用徒手拍摄全景是有一定难度的,要拍摄出更好质量的全景还需要下面介绍的设备: 1、三脚架:三脚架的作用是保证相机固定在一个中心点转动,并保证在转动时保持水平。此外在曝光时间较长时,保持相机稳定不动,以保证有好的清晰度。也可以使用单脚架,有的地方太小时使用单脚架更方便,但是在你拍摄时必须保持单脚架的位置不变。有时你想拍摄超高位置的全景,就需要一个超高架三脚架。由于全景拍摄需要连续拍摄邻接的几张照片,因此三角架在保证转动拍摄时保持水平是必不可少的。如果不能保持水平,在后续的图像处理——拼接全景就会遇到麻烦,虽然往往也能正确地拼接,但可能丢失全景某些部分,减小了全景的垂直视角,特别是在拍摄全360度的球形全景时,这一点更加重要。 2、水平仪:一般的廉价水平仪几乎没有用,它无法保证在三脚架上安装了全景头或相机后保持水平。如果你拍摄球形全景,对于全景头完全保持水平的要求并不高,因为你在用软件拼接图像时可以用软件控制,正确地排列定位图像在全景中的位置,尽管如此,水平仪在拍摄多列多幅全景图时,仍然是不可或缺的。 3、全景头:是一个放在三脚架上的附加设备,相机就放在其上,其作用是定位相机,使相机在拍摄每张照片转动时的中心在三角架的中心点上,以消除视差造成的失真,有利于后续的软件拼接。因此,全景头可以使你方便地调节相机与镜头中心的位置。此外,全景头往往还带有水平仪和转动相机时记录转角的刻度表,这在连续拍摄几张照片时是必需的。 4、广角镜头:水平转动相机连续拍摄几张照片,以便能覆盖水平360度的视角是拍摄球形全景必须做的,然后把它们精确定位再拼接在一起,建立全景照片。虽然各种镜头都可以拍摄球形全景,但是,使用广角镜头的优点是:1、可以少拍几张照片就能覆盖水平360度,无论在拍摄和拼接时都比较简单。2、广角镜头拍摄的垂直视角比较大。 8mm的镜头是适合于任何相机的最广角度的镜头,它在全幅相机上建立圆形图像,几乎涵盖了180度的视角。毫无疑问,使用8mm的镜头拍摄全景是建立全景照片的最快捷和容易的方法,特别是球形全景,因为这不仅在水平方向涵盖360度视角需要拍摄的照片少,而且垂直视角几乎达到了180度,即天和地全部都可以拍摄下来,这在后来的软件拼接时减少了很多麻烦。 全景制作之设备篇:鱼眼镜头
360全景图拍摄教程
360全景图拍摄教程 在网络上要展示交互式的空间或物体效果时,大致有两种方法,一种是直接3d 制作原始模型,然后贴图渲染在发布到网络上。另一种就是要涉及到全景摄影。因为全景图片是直接从实物拍摄而成,只要前期的拍摄和后期的全景软件处理做得好的话,其真实感要好于用三维制作的效果。制作高质量的360全景全景图片至少需要了解以下几个方面: 一、了解全景摄影和传统摄影的区别: 1.由于360度全景是要捕捉场景360°范围内的所有信息,所以一般用鱼眼镜头来拍摄(一般为视角等于或大于180°,焦距6mm~16mm之间的超广角镜头),鱼眼镜头镜片结构复杂,边缘和中央进光有差异,全景镜头无法使用遮光罩,无法使用偏光镜,除了sigma8mm能使用滤光片以外,大部分的全景镜头都无法使用等等。 2.全景摄影由于更多地需要后期的图像处理,更注重于数码摄影,而更多的摄影师目前还是使用传统的胶片相机。很显然数码摄影和胶片摄影的差别是相当大的,对同样的场景条件,用同样的参数,出来的结果可能相差非常远。数码摄影牵涉了太多电子的东西,发热了,振动了,冷了,光线太强了都难出好效果。 3.全景一般更侧重于表现场景的全局信息,所以全景拍摄更注重选点,传统摄影更注重于构图。 4.全景摄影更注重从全局光线去考虑,所以大部分的全景都是拍摄在晴朗的,光线充足的时候一般秋高气爽的时候,对场景整体光照比较讲究,世界的大部分全景摄影师都在大白天甚至烈日当中四处游曳,而传统摄影更喜欢早出晚归,在绝大部分光线条件下都可以拍出好的作品来。 5.全景摄影在景深方面没有太多的选择余地;在有太多运动物体的场景里由于受拼合等限制无法有良好的发挥。 二、选择好的摄影设备:全景拍摄,您需要有一个好的数码照相机,一个鱼眼镜头,一个专业的全景头和一个性能优秀的脚架,推荐以下几个配套方案: Nikon Coolpix4500、990、995、5000、5700相机+ FC-E8、FC-E9鱼眼镜头 + kaidan kiwi 系列云台、全视角4500全景头+脚架,Nikon D100 D1 D2H,Canon 1DS,Kordak14n 数码相机+sigma8mm鱼眼镜头+manfrotto全景头+脚架。以上设备已经过全景色友们的实践证明确实可行。如果采用传统相机+鱼眼镜头的,则要考虑用专业的底片扫描仪了。